수중운동체는 수상선과는 달리 운동체의 모든 부분이 물과 접촉하며 운항한다. 따라서 수상선에 비해 물과의 접촉으로 인한 마찰저항 및 형상저항이 크게 발생하게 된다. 저항의 크기는 속도의 제곱에 비례하기 때문에 빠른 속도로 운항할 경우 큰 저항을 받게 되어 비효율적이고 단순히 추력의 상승을 통한 목표속도의 도달은 한계가 존재한다. 한계를 극복하기 위하여 군사 선진국들을 중심으로 초공동 기술이 활발히 연구 중에 있다. 초공동 기술은 공동이 운동체를 덮게 하여 마찰저항을 줄이는 기술로 운동체의 앞부분에 위치한 캐비테이터에 의해 공동이 생기게 된다. 빠른 속도로 인해 자연적으로 생기는 공동을 자연형 공동이라 하고 인위적으로 가스를 불어주어 생기는 공동을 분사형 공동이라 한다.
공동의 형상에 따라 운동체에 작용하는 저항의 크기가 결정되기 때문에 운동체의 상태에 따른 공동의 모델링은 중요한 문제이다. Logvinovich(1972), Garabedian(1956), Savchenko(1998)는 공동의 길이 및 형상에 대한 연구를 수행하였다. 공동의 형상은 공동수에 의해 결정되는데 분사형 공동의 경우 공동 내의 압력이 불연속적이고 추정하기 어렵기 때문에 분사량과 공동수 사이의 관계식이 필요하다. Logvinovich(1975)는 공동의 형상을 결정하기 위해 필요한 분사량과 공동수 관계식을 정의하였다. Semenenko(2001)는 공동수와 Froude 수의 곱에 따라 분사형 공동의 세 가지 형태를 정의하였다. 분사형 공동의 모델링에 대해서는 현재에도 많은 연구가 진행되고 있다. 국내에서는 2차원 몸체의 초공동 유동의 수치해석 연구(Lee, et al., 2013)와 중력 및 자유표면 효과에 대한 수치해석 연구(Kim & Lee, 2014)가 이루어졌다. 2차원 유동을 3차원으로 확장시켜 축대칭 캐비테이터에 대한 초월공동유동의 수치해석(Kim, et al., 2013)도 수행된 바 있으며 수치해석 결과와 비교 분석하는 실험 연구가 수행되었다(Ahn, et al., 2012). 원판 캐비테이터의 환기 초공동에 대한 실험적 연구(Kim, et al., 2015)도 수행되었다.
초공동 수중운동체에 작용하는 유체력과 동역학 모델링 및 제어에 관해서는 Kim and Kim(2015)의 초공동 수중운동체의 통합 동역학 모델링 및 심도 제어에 관한 연구가 수행되었다. 수중운동체가 초공동 상태에 도달한 후 운동체가 공동의 표면 밖으로 나오게 되어 물과 접촉면적이 생겨 발생하는 planing 현상에 대한 연구는 Logvinovich(1980)에 의해 최초로 모델링되었으며 Vasin and Paryshev(2001), Yunfeng Shao, et al.(2003) 등에 의해 planing을 포함한 동역학 모델링 및 제어에 대한 연구가 수행되었다. Planing은 운동체의 수직 방향으로 갑작스럽게 작용하여 운동체의 불안정한 운행을 초래하기 때문에 운동체가 안정한 운행을 하기 위해서는 planing의 회피가 필요하다.
본 연구에서는 분사형 초공동 수중운동체의 분사형 공동 모델링 및 planing을 포함한 동역학 모델링을 수행하였다. 이를 바탕으로 planing을 회피하도록 하는 분사량 제어기를 설계하였고 캐비테이터를 이용한 심도 제어 시뮬레이션을 통해 분사량 제어기의 성능을 확인하였다. Planing 회피 제어기를 사용하였을 때 planing 힘과 모멘트를 최소화시켜 종축 안정성을 확보하였다. 2장에서는 분사형 공동의 특성을 서술하고 이를 기반으로 분사량-공동수 관계를 정의한 후 분사형 공동 모델링을 수행하였다. 3장에서는 planing이 발생하지 않게 하는 공동수를 계산하여 이를 목표 공동수로 정한 후 목표 공동수를 유지하도록 하는 분사량 제어기를 설계하였다. 4장에서는 캐비테이터를 이용한 심도 제어 시뮬레이션 결과에 대해 서술하였다. 분사형 초공동 수중운동체의 동역학 모델과 제어기는 시뮬레이션을 통해 완성도 및 타당성을 검증하였다.
분사형 초공동 수중운동체에서 공동의 크기와 길이는 운동체와 물의 접촉면적을 결정하며, 이는 운동체에 작용하는 유체력과 직결되는 문제이다. 2장에서는 운동체의 상태 및 가스 분사량에 따른 공동의 형상 모델링 방법을 서술하였다.
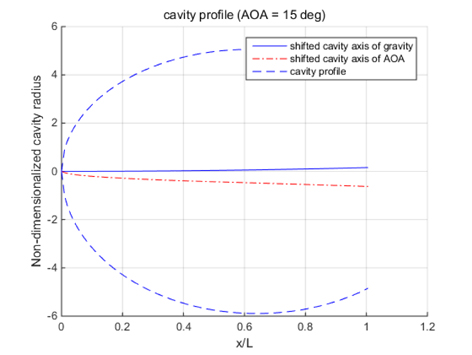
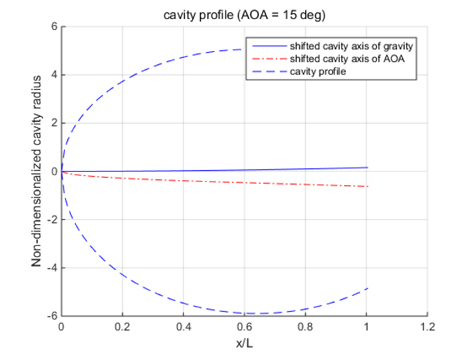
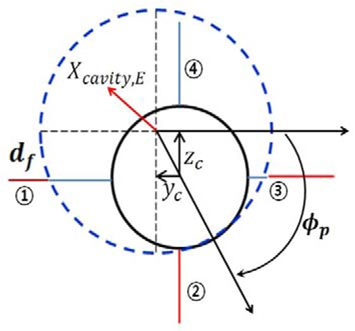
공동은 운동체 앞에 위치한 캐비테이터에 의해 생성되며 중력과 캐비테이터의 받음각의 영향을 받지 않는 경우에는 타원과 같은 형태로 생성된다. 2.1절에서는 공동의 중심축이 변화하지 않는 상황에서의 공동의 형태에 대해 모델링을 하였고, 2.2절에서는 중력과 캐비테이터 받음각에 의해 변화되는 공동 중심축에 대해 모델링을 하였다.
공동의 반지름과 길이는 공동수와 캐비테이터 반지름에 의해 결정되며 공동수는 식 (1)과 같이 정의된다.


공동 중심축은 중력과 캐비테이터의 받음각에 의해 생기는 양력에 의해 영향을 받게 된다. Logvinovich(1972)는 운동량 보존 법칙을 사용하여 공동 중심축 변화를 계산하였다. Zou, et al.(2013)은 분사형 공동에서의 중력의 영향에 따른 공동 중심축 변화량을 계산하였고 이를 식 (3)에 나타내었다.


여기서

2.1절과 2.2절의 공동 형상 모델링을 이용하여 공동수가 0.03, 캐비테이터 받음각이 15도일 때의 공동 형상을 Fig. 1에 나타내었다. x축은 운동체의 길이로 무차원화하였고 y축은 캐비테이터 반지름으로 무차원화하였다.
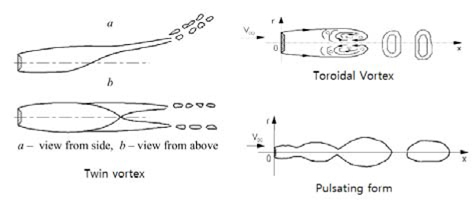
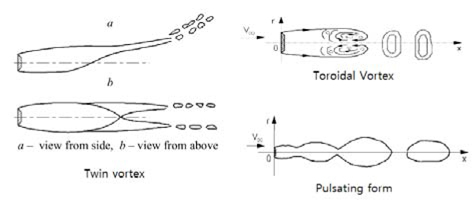
분사형 공동은 공동의 형태에 따라 세 가지로 분류되는데 Fig. 2의 왼쪽 위에서부터 twin vortex, toroidal vortex, pulsating 형태이다. Twin vortex는 안정하고 시간에 따른 변화가 없는 정상 상태이다. Toroidal vortex는 안정하지만 시간에 따라 공동의 형상이 변하는 비정상 상태이다. Pulsating 형태는 불안정할 뿐만 아니라 비정상 상태이다. 본 연구에서 분사형 공동은 정상 상태인 twin vortex의 형태라 가정하고 공동을 모델링 하였으며 시뮬레이션 결과에서 twin vortex 형태를 만족하는지 확인하였다. 분사형 공동의 형태는 공동수와 Froude 수에 의해 결정되며 이 때 Froude 수는 식 (6)과 같이 캐비테이터 직경으로 무차원화하여 정의된다.

Kawakami & Arndt(2011)의 최근 연구결과에 따르면 Twin vortex가 형성되기 위한 조건은 공동수와 Froude수의 곱이 6보다 작을 때이며 6보다 클 때는 toroidal vortex가 형성된다. Pulsating 형태는 공동수와 Froude 수의 곱이 아닌 분사량에 의해 결정된다. 과도한 양의 가스가 분사되었을 때 공동은 불안정하게 진동하여 pulsating 형태가 일어나며 공동이 불안정 해지는 조건은 분사형 공동수와 자연형 공동수의 비로 결정되며 식 (7)과 같다.


자연형 공동은 수심을 알면 공동수를 쉽게 구할 수 있지만 분사형 공동의 경우에는 분사되는 양에 따라 공동 내 압력이 바뀌게 되고 공동 내에서 압력이 불연속적인 값을 가지게 되어 식 (1)을 사용하여 공동수를 정의하기가 어렵다. 따라서 분사량과 공동수의 상관 관계를 정의하고 분사량에 의해 공동수가 결정되어야 한다. Logvinovich(1975)의 분사량과 공동수 관계를 식 (9)에 나타내었다. 은 시간당 분사량을 운동체의 속도와 캐비테이터의 직경으로 무차원화한 값으로 공급되는 가스와 캐비테이터 직경과 속도에 의한 부피비이다.




분사형 공동 실험은 캐비테이션 터널에서 수행되며 식 (9)에 나타난 분사량-공동수 관계 또한 실험을 통해 얻어진 관계 식이므로 실제 상황에서 사용하려면 보정이 필요하다. Karlikov & Sholomovich(1966)은 압력차이를 이용한 차폐효과를 고려하여 공동수를 보정하였고 식 (12)와 같다.

Kawakami & Arndt(2011)는 대부분의 실험에서

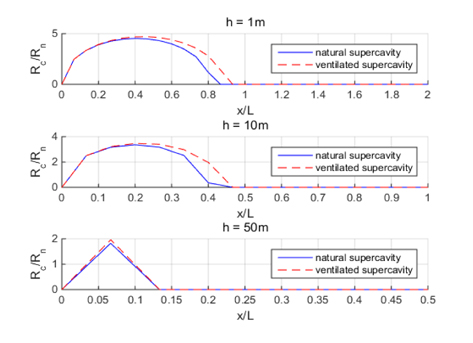
식 (13)에 의해 결정된 공동수가 실제 상황과 잘 맞는지 확인하기 위해 인위적인 분사량이 0인 경우와 자연형 공동 모델링의 결과를 비교해보았다. 분사형 공동 모델링에서 인위적인 분사량이 0인 경우는 자연형 공동의 경우와 동일하다. 따라서 수심과 운동체의 속도에 의해 결정된 자연형 공동수와 분사형 공동 모델링을 통해 결정된 공동수가 비슷한 값을 가져야 한다. Fig. 3에서는 수심 1m, 10m, 50m에서 두 경우의 공동 형태를 나타내었다. 자연형 공동수와 분사형 공동 모델링을 통해 결정된 공동수가 비슷하여 공동의 형태가 큰 오차를 가지지 않음을 확인할 수 있다.
분사형 공동 실험은 캐비테이션 터널 속에서 수행되기 때문에 실제 상황에서의 결과와 비교할 수가 없어 비교 가능한 자연형 공동의 경우만 비교해보았고 수심의 영향을 잘 고려함을 확인할 수 있었다. 이 때 자연형 공동의 결과는 실험을 통해 검증된 식 (2)를 사용하여 얻었다. 분사량에 따른 결과는 식 (10)에 의해 검증되기 때문에 2장에서 수행된 분사형 공동 모델링은 분사량과 수심에 의한 영향을 잘 고려하고 실제 상황을 잘 표현함을 확인할 수 있다.
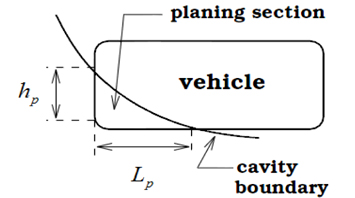
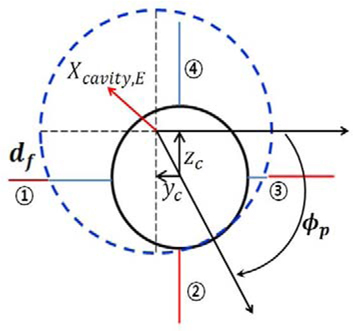
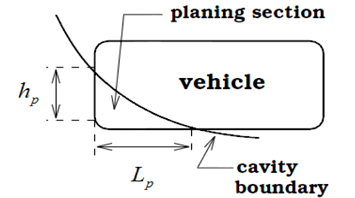
Planing이 일어나는 경우에 운동체의 간략한 형상을 Fig. 4에 나타내었다.
Planing 현상은 수중운동체의 선미부에서 공동과 접촉면이 생겨 발생하는 힘으로 액침 깊이와 planing 각도에 의해 정의된다. 운동체의 자세에 급격한 변화가 생기는 경우에 공동 밖으로 몸체가 나오면 불연속적인 planing 힘과 모멘트가 운동체에 작용하여 운동체의 불안정한 운동을 초래한다. Shao, et al.(2003)은 planing 힘과 모멘트를 식 (15)와 (16)와 같이 모델링하였다. 이 때



액침 깊이

캐비테이터에서 생성된 공동은 운동체의 끝부분까지 오면서 부력에 의해 상승한다. 공동이 선미부까지 오는데 걸리는 시간
분사량 제어를 이용하여 planing 회피를 하기 위해 공동수를 낮추어 공동 반지름을 크게 하여 액침 깊이를 줄이는 방법을 사용하였다.
이 때 목표 공동수는 PID 제어기를 통해 결정된다. PID 제어기는 간단하면서 직관적으로 오차를 이용하여 제어할 수 있는 장점을 가지고 있다. 비례 제어는 원하는 목표값에 도달하게 하고, 적분 제어는 정상상태에 도달하였을 때 오차를 제거하게 한다. 미분 제어는 목표값에 도달하는 지연 시간을 작게하는 것을 목적으로 사용하였다. 식 (17)에서 공동 반지름을 제외한 항에 20% 여유를 주어 PID 제어기의 입력값으로 사용하였다. 공동이 물체를 다 감싸게 되어 초공동 상태가 되는 0.033에서 액침 깊이에 의한 값을 빼주어 목표 공동수가 결정되고 식 (19)와 같다.


액침이 일어나지 않는데도 불구하고 필요 이상으로 작은 값이 목표 공동수로 결정되는 경우에는 분사량의 낭비와 pulsating 형태를 야기할 수 있다.
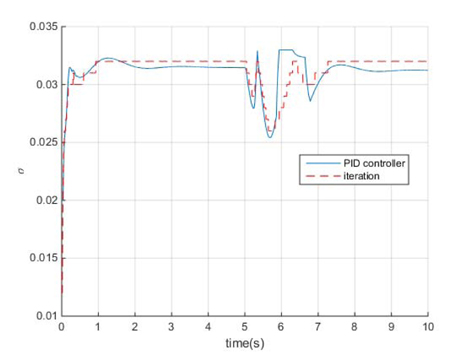
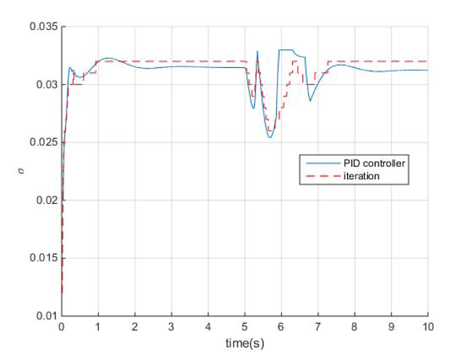
PID 제어기의 성능을 검증하기 위해 식 (19)에서 정의된 목표 공동수와 0.033부터 0.001씩 줄여가며 액침이 일어나지 않도록 하는 최대의 공동수를 구해 비교해보았다. Fig. 6을 보면 PID 제어기를 이용해 구한 목표 공동수와 매 시간마다 0.001씩 줄여가며 반복적인 계산을 통해 얻어진 공동수가 비슷함을 알 수 있다. 이 때의 결과는 4장에서 수행한 심도 제어 시뮬레이션과 동일한 조건에서 계산된 결과이다.
공동수는 공동 반지름을 결정하는 값으로 식 (17)과 같이 운동체의 상태와 공동 반지름을 이용하여 액침의 정도를 추정할 수 있으며 분사량과의 관계식이 정의되어 있어 분사량 제어기의 되먹임 값으로 사용하기 적절하다. 공동수를 결정할 때 필요한 값들로는 수심, 분사량, 운동체의 상태 등이 있다. 시뮬레이션 시에 모든 값들은 계측 가능하다고 하였다.
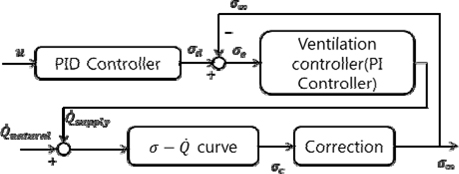
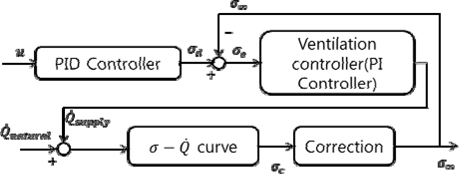
Fig. 7은 분사형 초공동 수중운동체의 분사량 제어 절차를 블록 선도로 나타낸 것이다. 식 (19)에서 정의된 목표 공동수와 현재 공동수의 차이를 공동수 오차로 정의한다.
초공동 수중운동체의 특성상 공동수 오차의 미분값은 측정이 어렵고 잡음의 영향이 클 것으로 예상되므로 미분 제어기는 사용하지 않고 공동수 오차를 직관적으로 사용하여 각 게인들의 변화에 따라 운동체의 상태를 쉽게 분석하고 특성을 알 수 있는 비례-적분 제어기를 사용하였다.
PID 제어기는 단일입출력 시스템에서 주로 사용되고 제어기의 설계 시에는 선형화된 운동방정식을 사용한다. 선형 운동방정식인 경우에는 시스템을 안정하게 만드는 극점 위치를 이용하여 PID 제어게인을 결정할 수 있다. 분사량과 공동수의 관계는 일반적인 제어 문제에서 사용되는 미분방정식의 형태가 아니기 때문에 타 제어기의 사용과 PID 제어기의 해석적인 분석 또한 어려워 오차(현상)만을 기반으로 하여 게인을 직관적으로 결정하였다.
분사량 제어기에 의해 결정되는 단위시간 당 가스 분사량은 식 (21)과 같다.

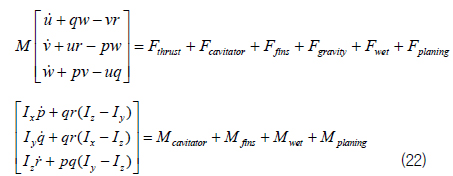
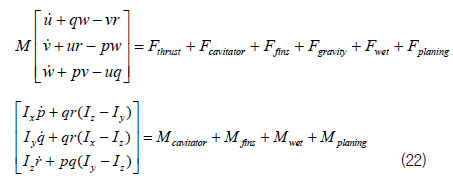
3장에서는 planing 모델링 및 planing 회피 제어기를 설계하였다. 수중운동체에 작용하는 힘은 planing 외에 캐비테이터에 의한 힘, 핀에 의한 힘, 유체력 등이 있는데 본 연구에서는 Kim and Kim(2015)의 초공동 수중운동체의 통합 동역학 모델링을 참고하여 동역학 모델링을 완성하였고 운동 방정식은 식 (22)와 같다.
기존의 분사량 제어에 관한 연구 (Kim & Kim, 2015)는 초공동화 상태를 유지하도록 하였는데 본 연구에서는 더 나아가 초공동화 상태 유지뿐만 아니라 planing을 회피하는 최적의 분사량이 결정되도록 제어기를 설계하였다.
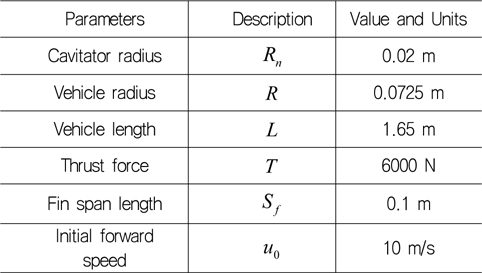
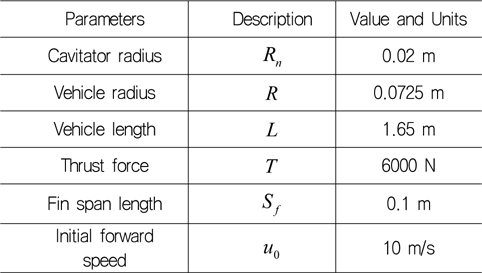
초공동 수중운동체의 동역학 모델링 및 planing 회피 제어기의 성능검증을 위해 시뮬레이션을 수행하였다. 캐비테이터를 이용한 심도 제어 시에 planing 회피 제어기를 사용하였을 경우와 사용하지 않았을 경우에 대해 결과를 비교하였다. 시뮬레이션에 사용된 초기값과 운동체의 제원을 Table 1에 나타내었다.
[Table 1] Initial values and data of vehicle
Initial values and data of vehicle
초기 전진속도는 특이점을 피하기 위하여 10m/s로 정하였다. 이 외에 초기값은 모두 0이다. 운동체는 캐비테이터 명령각에 의해서만 심도 제어를 수행한다. 운동체의 선미부에 위치한 핀은 심도 제어에 사용되지 않으며 운동체의 안정성을 유지하는데 사용된다. 핀 제어는 불확실성이 많고 캐비테이터에 비해 운동체에 미치는 힘이 작아 안정성을 유지하는 목적으로만 사용하였다.
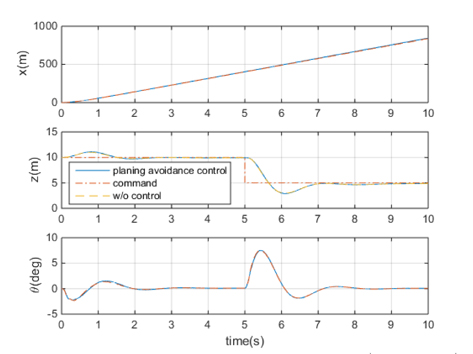
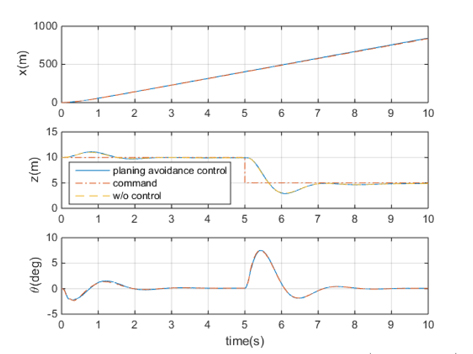
초기 심도가 10m이고 5초 후에 목표 심도가 5m로 바뀌는 심도 변화가 작은 경우에 운동체의 상태를 Fig. 8에 나타내었다. 심도 변화가 작기 때문에 운동체는 작은 종동요각을 가지고 운행하며 큰 planing 힘과 모멘트를 발생시키지 않아 제어기의 유무에 따른 운동체의 상태는 거의 동일하였다.
하지만 심도 변화가 큰 운동을 할 경우에 운동체는 큰 종동요각을 가지게 되고 큰 planing 힘이 발생하게 되어 제어기가 필요하게 된다.
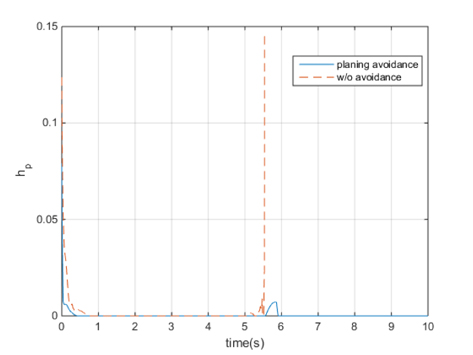
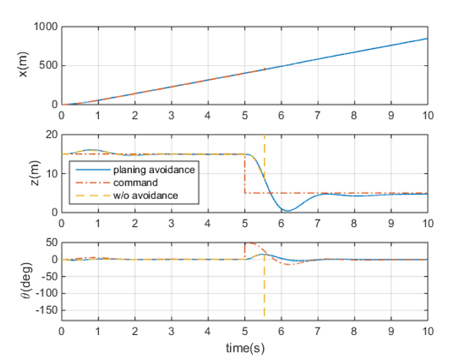
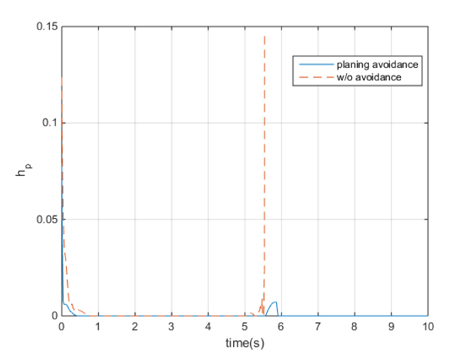
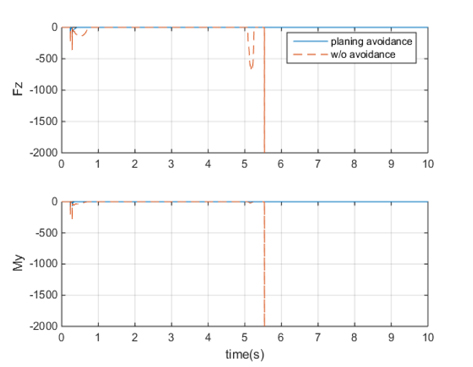
두 번째 시뮬레이션은 초기 심도는 15m이고 5초 후에 목표 심도가 5m로 바뀌는 경우이다. Fig. 9에 나타난 액침 깊이 변화를 보면 심도 변화가 이루어지는 5초 후에 planing 회피 제어기를 사용하지 않았을 때 급격한 액침 깊이 변화가 생기며 Fig. 10에 나타낸 planing 힘과 모멘트가 발생하게 된다.
액침 깊이는 운동체의 상태와 공동 반지름에 의해 바뀌게되며 공동 반지름을 늘려 액침의 크기를 최소화하는 것이 제어기의 목적이다. Planing 회피 제어기를 사용한 경우에는 액침 깊이 변화가 작고 planing을 최소화하는 것을 확인할 수 있었다. Planing 회피 제어기를 사용하지 않았을 때는 5.6초 이후에 급격한 상태 변화로 인해 시뮬레이션이 불가능하며 그전의 결과만 나타내었다.
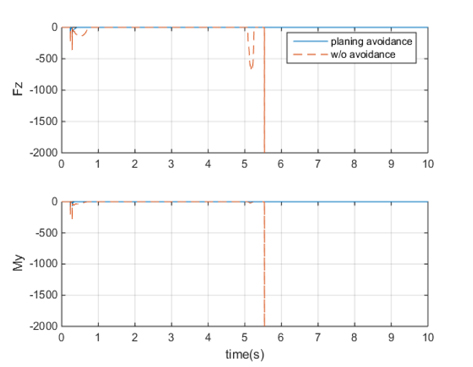
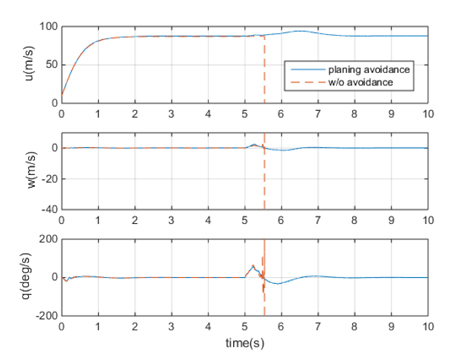
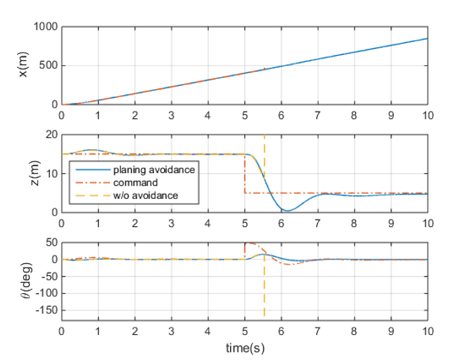
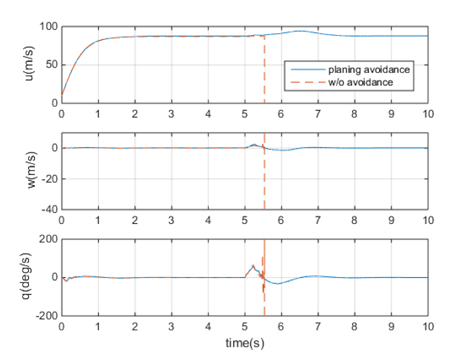
액침 깊이는 운동체의 상태와 공동 반지름에 관한 식이다. 운동체의 자세 및 작용하는 힘과 공동수에 의해 액침의 크기는 바뀌게 된다. 액침 깊이에 의해 생성되는 planing은 운동체의 불안정한 운동을 초래하며 운동체의 상태를 Fig. 11과 Fig. 12에 나타내었다. 제어기를 사용하지 않았을 때 운동체의 선미부에서 급격한 planing 힘과 모멘트를 받게 되는데 이로 인해 운동체는 음의 값을 가진 큰 종동요각 변화를 가지게 되고 급격히 잠기게 되면서 상태를 시뮬레이션하기가 불가능해진다.
제어기를 사용하지 않는 경우에는 큰 심도변화가 이루어질 때 급격한 planing 힘과 모멘트가 발생하는 것을 확인할 수 있었으며, 운동체의 상태 변화로 인해 액침 깊이가 커져 불안정한 운동을 초래하는 것을 확인할 수 있었다.
Planing 회피 제어기를 사용하면 목표 공동수를 낮춰 cavity boundary를 변화시킨다. 운동체의 상태 변화가 크더라도 공동 반지름을 크게 하여 액침 깊이가 증가됨을 상쇄시킬 수 있고 결과적으로 planing을 최소화하여 종축 안정성을 확보할 수 있다.
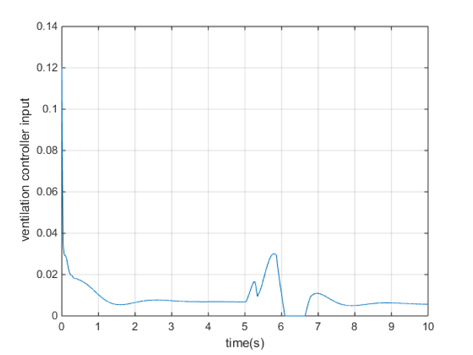
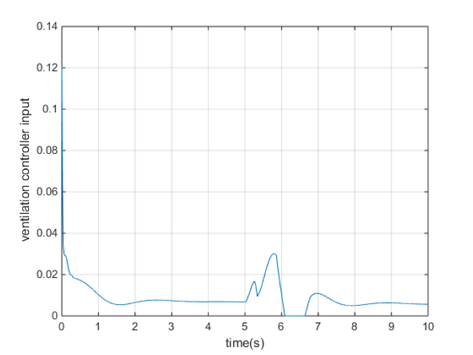
Planing 회피 제어기를 사용하면 인위적인 분사를 통해 공동의 크기를 늘려 액침을 최소화 시킬 수 있으며 이 때 분사량 제어기의 입력값을 Fig. 13에 나타내었다. 액침 깊이의 크기가 클수록 더 큰 제어입력이 생기게 되고 20%의 여유를 주어 사용하였기 때문에 액침이 없는 경우에도 제어 입력이 존재할 수 있다.
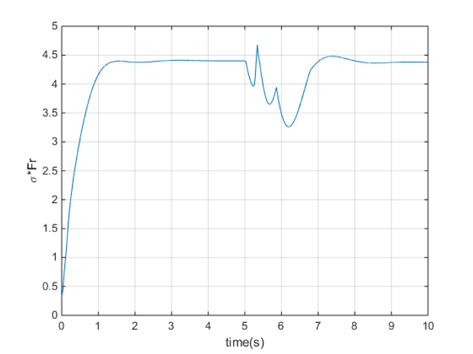
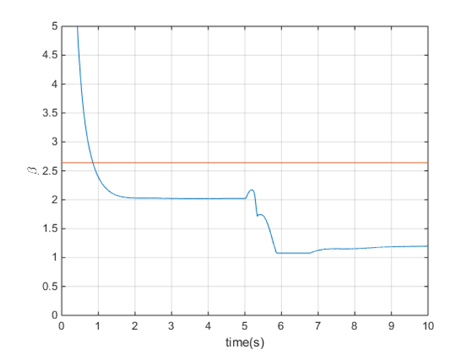
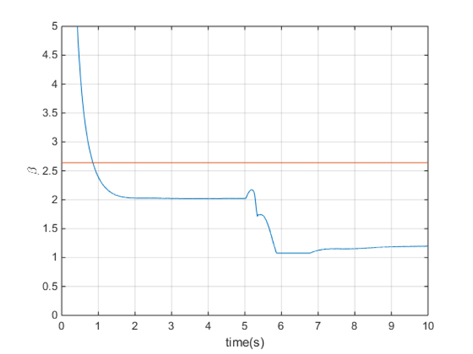
2장에서 분류한 분사형 공동의 형태를 알아보기 위하여 공동수와 Froude 수의 곱의 값이 6보다 작은지 확인하였다. Fig. 14를 보면 시뮬레이션 도중에 6을 넘지 않았고 twin vortex 형태를 유지함을 확인할 수 있었다.
분사량에 의해 결정되는 pulsating 형태를 확인하기 위해 식 (7)에서 정의된
2장에서 분사형 공동 모델링 수행 시에 분사형 공동은 twin vortex 형태라 가정하고 공동 모델링을 수행하였는데 분사형 공동이 발사 초기에 잠깐 불안정한 형태를 가진 후에 twin vortex 형태가 되는 것을 확인함으로써 공동 모델링이 큰 오차를 가지지 않을 것을 확인하였다.
본 연구에서는 분사형 초공동 수중운동체의 분사형 공동 모델링, planing 모델링 및 planing 회피 제어기 설계에 관한 연구를 수행하였고 시뮬레이션을 통해 제어기의 성능을 검증하였다.
분사량과 공동수 관계를 이용하여 분사량에 따른 공동수를 결정하고 캐비테이션 터널 속이 아닌 실제 상황에서의 공동수로 보정해주었다. 수심의 영향을 잘 고려하는지 확인하기 위해 수심을 바꾸어 가며 자연형 공동의 결과와 비교하여 공동 모델링이 실제 상황을 잘 고려하는지 확인하였다.
Planing 회피를 하기 위해 액침 깊이를 최소화시키는 목표 공동수를 결정하고 그에 따른 분사량 제어기를 설계하여 planing 회피 제어기를 완성하였다. 제어기를 사용하지 않았을 경우에는 운동체의 불안정한 운동을 초래하며 심도 제어가 불가능하다. Planing 회피 제어기를 사용하면 액침 깊이를 최소화시켜 불안정한 운동을 막아주고 심도 제어가 수행 가능하다. 본 연구의 목적은 정확한 제어 게인을 결정하는 것이 아니라 초공동 수중운동체의 planing 회피 제어의 가능성을 확인하는 것에 있기 때문에 제안된 제어기를 실제로 사용하기 위해서는 다양한 실험을 통해 모델링의 오차를 보완하는 과정을 거쳐야 한다.
또한 본 연구의 모델링은 대부분 경험식을 참조하여 사용하였기 때문에 시뮬레이션의 정밀도는 실제 실험 및 현상과 차이가 있을 수도 있다. 분사형 공동의 경우 공동 형상 모델링, planing 모델링, 천이구간에서의 동역학 모델링에 대해 여전히 연구가 진행되고 있는 단계이며 불확실성이 존재한다. 그럼에도 불구하고 본 연구의 결과는 분사형 공동의 특성을 파악할 수 있고 분사형 초공동 수중운동체 개발의 기초 연구 자료로서 충분한 가치를 가질 수 있을 것이다.