Distributed Networked Control Systems (NCSs) through wireless networks have a tremendous potential to improve the efficiency of various control systems. In this paper, we define the State Update Interval (SUI) as the elapsed time between successful state vector reports derived from the NCSs. A simple expression of the SUI is derived to characterize the key interactions between the control and communication layers. This performance measure is used to formulate a novel optimization problem where the objective function is the probability to meet the SUI constraint and the decision parameter is the channel access probability. We prove the existence and uniqueness of the optimal channel access probability of the optimization problem. Furthermore, the optimal channel access probability for NCSs is lower than the channel access probability to maximize the throughput. Numerical results indicate that the improvement of the success probability to meet the SUI constraint using the optimal channel access probability increases as the number of nodes increases with respect to that using the channel access probability to maximize the throughput.
무선 센서 및 액추에이터 네트워크를 통한 네트워크 제어 시스템 (NCS: Networked Control Systems)은 산업 자동화 시스템, 차량 네트워크 시스템, 항공 교통 시스템과 같은 다양한 스케일의 분산 제어 시스템의 효율성을 극대화 할 수 있는 잠재력을 가지고 있다[1-3]. NCS는 센서, 액추에이터, 제어기가 공간적으로 분산화 되어있으며, 이들이 기존의 point-to-point 연결에서 벗어나 무선 네트워크를 통하여 연결된 시스템을 말한다. 제어 응용 시스템에서 무선 네트워크를 통하여 센서 측정 데이터 및 제어 신호를 전송하게 되면 케이블 설치비용 등을 포함한 시스템 구축 비용을 획기적으로 절약 할 수 있다. 그러나 현재의 무선 네트워크 프로토콜은 이러한 NCS의 안정성을 보장하지 못하는 치명적인 결함을 갖고 있다[1].
네트워크는 제어 시스템의 안정성을 보장하기 위하여 어떠한 불완전한 트래픽 상황, 예측 가능하지 못한 혼잡 및 부분적인 장애에도 항상 적시에 적절한 정보를 전달할 수 있어야 한다. 그러나 제어와 통신 시스템 사이의 복잡한 상호작용을 효율적으로 모델링 할 수 없기 때문에, NCS를 위한 무선 네트워크 프로토콜의 설계는 아직까지 미진한 연구 결과를 보이고 있다. 이러한 문제의 가장 핵심적인 이유는 현재까지 제어와 통신 계층사이의 연구가 상호 유기적으로 진행되지 못한데서 기인한다.
기존 대부분의 연구는 중앙 집중적인 시분할다중접속 (TDMA: Time Division Multiple Access) 기반의 매체접근방식에서 주어진 트래픽 또는 지연 요구 조건에 따른 스케줄링 기법 [4,5]과 제어 시스템의 성능 요구조건을 만족하도록 트래픽 및 지연과 같은 파라미터를 최적화하는 방식에 [6,7] 적용되었다. 따라서 기존에는 제어와 통신 계층이 분리된 형태로 많은 연구가 진행되었다.
본 연구에서는 기존의 연구와 다르게 NCS를 위한 무선 네트워크 프로토콜 설계 방향의 새로운 측면을 고려하고자 한다.
특히, NCS를 위한 경쟁기반 매체접근제어(MAC: Medium Access Control)의 채널 접근 확률에 관한 최적화문제를 다루고자 한다.
본 연구는 주요 4가지 핵심 내용을 포함하고 있다.
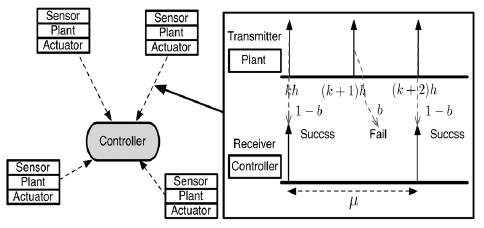
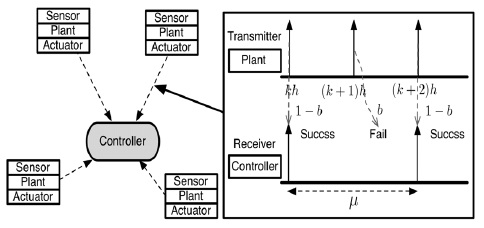
그림 1은 다수의 물리적 시스템들이 무선 네트워크를 통하여 제어가 이루어지는 네트워크 제어 시스템의 구조를 표현하고 있다[8].
기본적으로 각 센서는 물리적 시스템에 부착되어 상태 정보를 읽어 들이고, 이러한 정보를 제어기에 전달하며 계산된 제어 신호는 다시 액추에이터에 전송된다. 따라서 NCS를 위한 무선 네트워크는 센서에서 제어기로 전달되는 상향 링크와 제어기에서 각 액추에이터로 연결되는 하향 링크로 구성된다. 이러한 시스템에서 무선 네트워크는 정보 전송 시에 지연이나 패킷 손실을 가져올 수 있다. 따라서 무선 네트워크의 성능은 NCS의 안정성에 직접적인 영향을 줄 수 있으며, 극심한 네트워크 성능 저하 시 전체 시스템의 안정성에 치명적인 영향을 줄 수 있다[1].
물리적 시스템의 상태 정보는 갱기주기
각 노드는 [1,
패킷 손실은 기본적인 Bernoulli 랜덤 프로세스에 따라 모델이 되었으며, 패킷손실률은 물리적 시스템과 제어기 사이의 확률
기존의 제어 시스템은 주로 연속적인 샘플링에 패킷이 무손실과 무지연의 이상적인 네트워크를 통하여 전송 되는 것을 가정하였다. 그러나 어떠한 무선 네트워크 프로토콜을 사용하더라도 이러한 이상적인 네트워크 성능을 만족 시킬 수는 없다. 특히, 이러한 성능 요구 조건은 경쟁기반 랜덤 매체접근방식의 무선 네트워크에서는 만족시키기 어려운 기술적 한계를 갖고 있다. 경쟁기반 랜덤 접근 프로토콜 미래의 항공 및 교통 관제 시스템과 같은 제어 시스템에서 사용이 되고 있다[2,3].
본 연구에서는 상태갱신주기를 성공적인 상태 정보 업데이트 사이의 경과 시간으로 정의하고 이를 최적화 문제에 사용한다. 즉, 그림 1에서 보는 것과 같이 센서와 제어기 사이의 상향 링크 통신에서 샘플링 된 센싱값이 성공적으로 제어기에 수신된 패킷 사이의 경과 시간을 의미한다. 최근 많은 제어 시스템 연구들은 이러한 NCS의 안정성과 직결되는 최대 허용 가능한 상태갱신주기에 관한 내용을 포함하고 있다[1,9]. 관련 논문에서는 손실 및 지연이 없는 이상적인 네트워크 시스템을 가정하여, 제어 시스템의 안정성을 보장 할 수 있는 최대 허용 가능한 상태갱신주기의 길이를 이끌어 내고 있다. 각 노드는 최대 허용 가능한 상태갱신주기 동안에 적어도 한 개 이상의 패킷을 성공적으로 전송해야만 제어 시스템의 안정성을 보장 할 수 있다. 따라서 최대 허용 가능한 상태갱신주기와 관련한 제약 조건은 다음과 같이 패킷의 신뢰도 요구 조건으로 표현 된다.

여기에서

이 제한 조건은
성공적인 패킷 전송은 하나의 슬롯 시간에 적확히 하나의 노드만 패킷을 전송 할 때 이루어지므로, 네트워크의 패킷 손실률은 다음과 같다.

따라서
제어 시스템 설계자에 의하여

여기에서

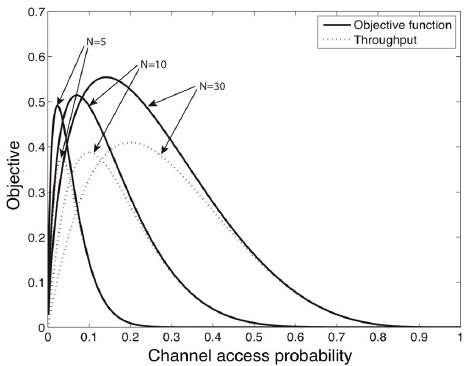
기존의 매체접근제어 관련 연구는 네트워크의 전송량을 최대화하는데 집중되어 있다. 따라서 제안된 NCS를 위한 최적화 문제는 전송량 최대화 문제와 비교 될 수 있다.

NCS를 위한 최적화 문제의 목적 함수인 식(5)는 전송량 최대화 문제의 목적 함수인 식(6)번과 다른 것을 확인 할 수 있다. 제시된 NCS를 위한 최적화 문제는 전송량 최대화 문제보다는 엔트로피의 최적화 문제와 흡사함을 알 수 있다.
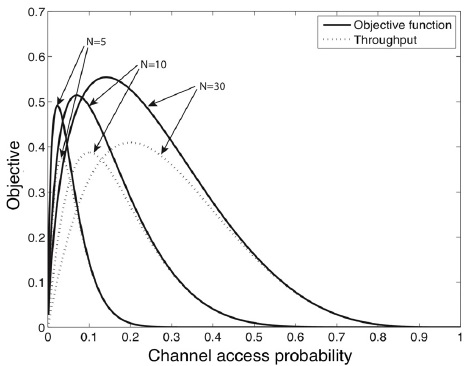
그림 2는 다양한 노드 수와 채널 접근 확률에 따른 NCS 최적화 문제의 목적 함수인 식(5)와 전송량인 식 (6)를 비교하고 있다. 채널 접근 확률이 높을 수 록 트래픽의 양이 늘어나기 때문에 시스템의 상태갱신주기는 최대 허용 가능한 상태갱신주기에 근접함을 확인할 수 있다.
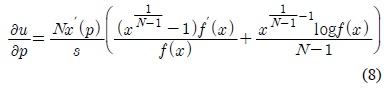
본 절에서는 제시된 최적화 문제의 목적 함수를 최대화 할 수 있는 최적 채널 접근 확률값의 존재성과 유일성을 증명한다.
정리 1:
증명: 먼저 최적화 문제인 식(5)를 재정립하면

여기에서
여기에서

여기에서 이며
또한,

두 함수
따라서 함수

비슷한 방식으로 함수

여기에서

유일한 해답

이것으로 정리에 대한 증명을 마무리한다.
정리 1의 증명에서 확인 했듯이 최적의 채널 접근 확률



본 절에서는 NCS를 위한 최적화 문제의 최적 채널 접근 확률

정리 1의 증명에서 컨벡스 함수


따라서 NCS의 안정성을 위한 최적의 채널 접근 확률은 전송률을 최대화하는 채널 접근 확률보다 낮다는 것을 알 수 있다.
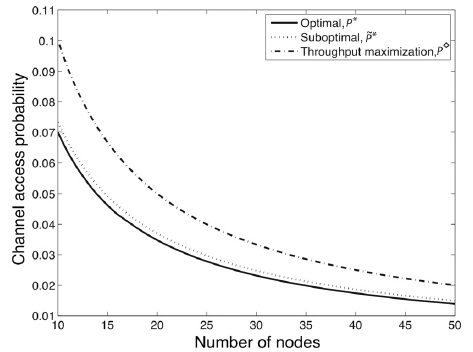
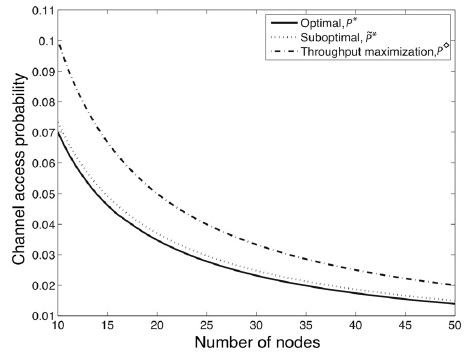
본 절에서는 NCS를 위하여 제안된 최적 채널 접근 확률과 기존의 네트워크 전송량 최대화를 위한 채널 접근 확률의 성능을 비교 분석한다. 그림 3은 식(9)의 최적 채널 접근 확률
제어 시스템의 특성을 정량적으로 정규화하기 위하여, 시스템 지표
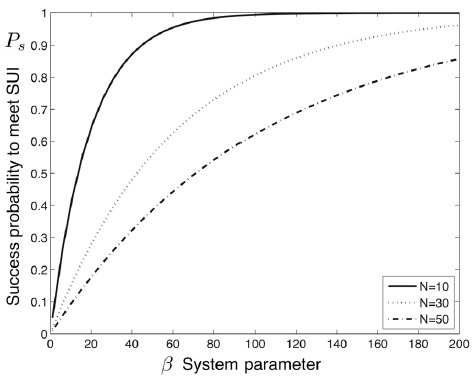
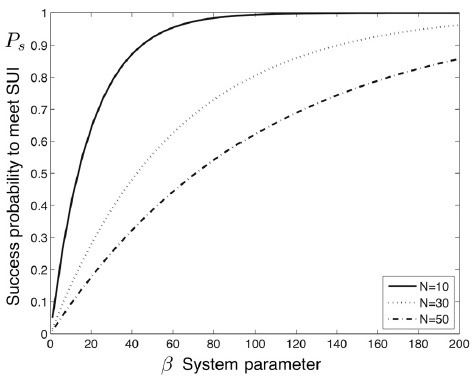
그림 4는 Monte-Carlo 시뮬레이션을 통한 최대 허용 가능한 상태갱신주기 요구 조건을 만족하는 확률을 다양한 노드 수와
NCS의 요구 조건을 만족하는 확률은 높은
NCS를 위한 최적화 문제의 최적 채널 접근 확률
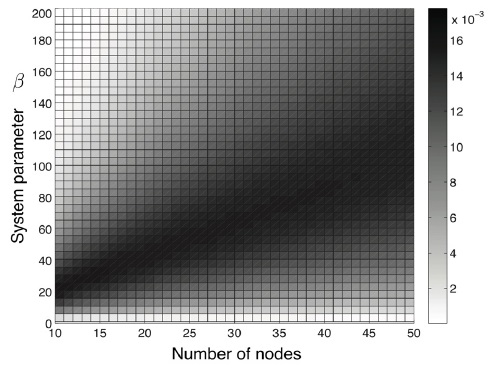
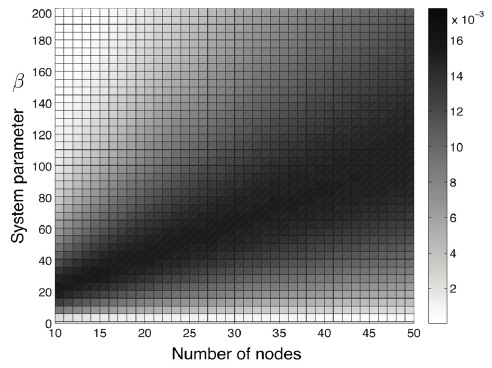
그림 5에서는 다양한 노드 수와
본 연구는 네트워크 제어 시스템을 위한 무선 네트워크 프로토콜의 최적화 방안을 제시하고 있다. 특히, 상태정보갱신주기라는 성능 메트릭을 사용하여 제어시스템의 네트워크 요구 사항을 만족시킬 수 있는 효율적인 무선 네트워크의 매체접근방안을 제공하였다. 이러한 방안의 핵심은 최적화 문제에 기반하는데, 문제의 목적 함수는 상태갱신주기의 제한 요소를 만족하는 확률이며 변수는 매체접근 확률로 정의되었다. 제시된 최적화 문제의 최적 채널 접근 확률값은 그해가 유일하다는 것을 수학적으로 증명 하였다. 또한, 네트워크 제어 시스템을 위한 최적 채널 접근 확률이 기존의 전송률을 최대화 하는 채널 접근 확률보다 낮다는 것을 증명하였다.
성능 분석 결과는 시스템의 안정도가 상태갱신주기를 고려한 최적의 매체접근 확률을 사용하였을 때가 전송률을 최대화하는 매체접근 확률을 사용 했을 때 보다 높다는 것을 보이고 있다.