In some cases, despite the pedestrian jaywalking pedestrian traffic lights to red, or even wait for the walk signal to stand down in the driveway. If this is the case may be liable to lead to a traffic accident. Thus, using an infrared sensor wateuna adopted the approach that the warning announcement when a pedestrian enters the driveway, curved pedestrian crossing the intersection in this case, it is difficult to install. In this paper, we propose a Fitness referral system utilizes a built-in sensor of the Android mobile devices. For this purpose, the sensor is a proximity sensor using an acceleration sensor. The proximity sensor has a number of disadvantages compared to the high precision battery power, the acceleration sensor accuracy, fast response time, on the other hand, the disadvantage is the lower. Close to reduce battery consumption of the sensor, BMI of the user sensor control mechanism and increase the accuracy of the acceleration sensor (Body Mass Index) obtained after the index was applied to the recommendation algorithm, which like the movement mechanism.
자동차는 개인에게 이동성, 편리성 등을 증가시키기도 하지만 교통사고 등의 사회적인 문제를 유발하고 있다.
차량 및 보행자와의 원활한 소통과 안전을 위해 교통안전시설물의 설치도 계속 증가하고 있다. 이들은 도로상의 교통신호등의 경우 문자나 기호를 동기화 하여 정지, 진행, 방향전환, 주의 등의 신호를 표시하기 위한 교통안전시설물의 일종으로 차량이나 사람 등에 대하여 어떤 움직임을 취하도록 지시하는 교통안전시설물이다[1,2].
정부의 지속적인 교통사고 감소 노력으로 우리나라의 교통사고 사망자수는 최근 계속 감소하는 추세에 있으나 자동차 1만대 당 3.2명(2006년 기준)으로 미국, 영국, 일본 등 교통안전 선진국에 비해 아직도 3~4배나 높다[3].
이에 본 논문에서는 카메라를 이용하여 횡단보도내의 영상을 획득하고, 획득된 영상을 소벨(Sobel) 영상으로 변환하여 비교하는 방식으로 횡단보도의 보행자 여부를 검지하는 방법에 대해 제안한다. 이에 따라 기존 방식보다 곡선형도로의 횡단보드에서 보행자를 효과적으로 검지할 수 있도록 한다.
소벨 알고리즘이란 영상의 에지를 추출하여 마스킹(masking) 함으로써 영상의 특성을 판별하는 대표적인 영상처리 기법이다. 영상을 획득하고, 획득된 컬러 또는 흑백 영상을 그대로 처리하기에는 처리 속도의 시간적인 문제가 매우 크다. 그러나 획득된 영상을 소벨 영상으로 변환하여 처리하면 잡음 제거나 속도 적인 측면에서 매우 탁월한 효과를 보인다.
영상처리 및 패턴인식 기반 응용분야에서 입력 영상에 대해 전경과 배경을 분할하는 것이 필요할 때 많이 사용한다. 그 이후 처리는 전경에서만 수행될 수 있으므로 시간절약 뿐만 아니라 시스템의 성능에도 영향을 끼친다[4].
카메라를 이용하여 영상을 촬영하고, 이 영상을 이용하여 검지하기 위한 많은 알고리즘이 개발되었다. 그 예로는 영상검지 기법을 활용하여 끼어들기 위반차량 검지 알고리즘, 영상검지기간 데이터 차이 보정을 통한 돌발 상황 검지 알고리즘의 오차율 감소방안, 철도건널목 지능화를 위한 영상 처리식 시설물 검지장치 그리고, DVR 영상검지 장치를 이용한 실시간 교통사고 판별 시스템 등이 있다[5-8].
그러나 현재 무인 경계 장치 등의 분야에서 사용되는 방식에서는 외부 침입자 유무를 판별하기 위하여 1차적으로 영상의 변화를 측정하고, 이에 따른 변화를 움직이는 사람으로 먼저 추정하는 방식을 많이 사용하고 있다. 이 방식을 이용하는 이유는 영상의 변화에서 가장 능동적인 변화를 보이는 요인의 약 95% 이상이 사람이었기 때문이라고 한다.
이렇게 사람으로 추정된 부분을 다시 형태에 따라 어른이나 아이 등으로 구분하여 판단하기에는 많은 시간이 소요되며, 경계나 안전을 위하여 설계된 시스템에서 사람을 반드시 판단하고 그 사람에게만 안내를 하려다가는 이미 필요한 시점을 놓치는 경우가 발생 할 수 있다. 이는 안전 경고에 따른 실시간 처리가 불가능할 수 있음을 나타낸다.
따라서 본 논문의 임베디드 시스템을 이용한 실시간 처리를 위하여서는 무인 경계 장비 등에서 사용하는 영상 변화 감지 알고리즘을 사용하여 실시간 구현을 가능하게 하였다.
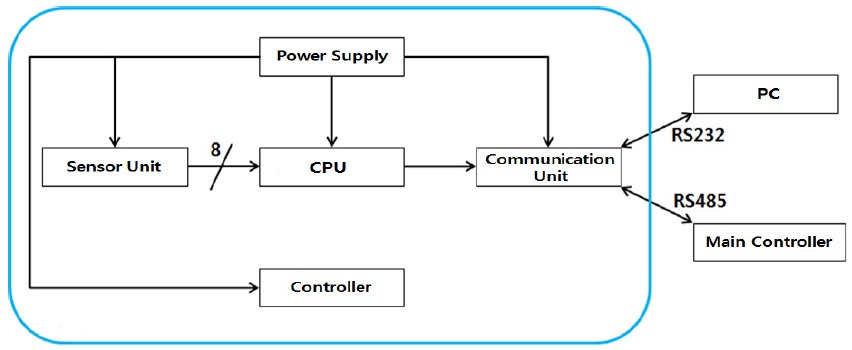
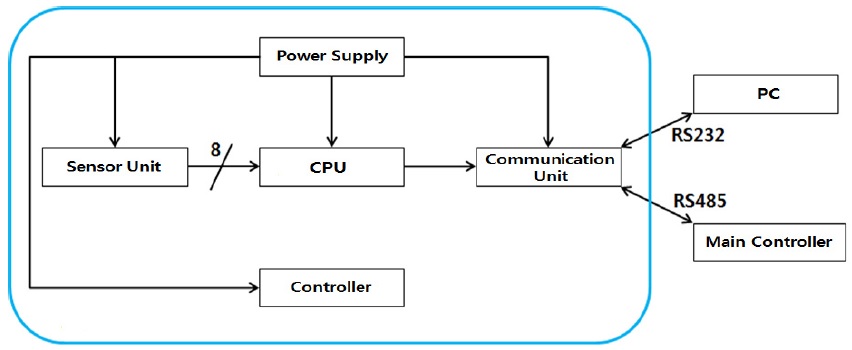
그림 1은 전자감응시스템의 블록다이어그램으로, 각 부의 기능적인 내용을 간략하게 도시화하였다.
3.1.1. 센서부
센서부는 사람을 인지하는 부분으로 본 장치에서의 센서로는 Omnivision사의 OV7725이다. 성능은 30만화소를 지원하고 해상도는 640×480이다.
3.1.2. 중앙처리부
중앙처리부에서는 입력된 영상을 소벨 변환 처리 하고, 이미지 비교에 의한 보행자 검지 실시간 처리를 수행한다. 이를 위한 칩은 Nuvoton사의 N32916 프로세서이다.
3.1.3. 출력
보행자를 인식한 뒤에 UART 방식으로 된 직렬(Serial) 데이터를 RS485통신 소자를 이용하여 메인 제어부에 송신하는 역할을 수행한다.
전자감응시스템은 일정 구역에 진입한 사람을 센서부에 있는 CMOS 센서가 감응하여 8bit 데이터를 중앙처리부로 출력하고, 출력된 데이터를 RS485통신을 이용하여 메인 제어부로 데이터를 전송하면 이 데이터를 수신한 메인 제어부는 데이터의 내용에 따른 최종적인 처리결과를 각각 음성과 LED 디스플레이를 이용하여 출력한다.
전자감응시스템 중앙처리부의 메인 CPU는 Nuvoton사의 N32916을 사용하였고, OS는 리눅스 Ubuntu 14.04버전을 사용하였다. 언어는 C언어를 크로스 컴파일 하여 사용하였으며, 시스템의 운용에 알맞은 전원을 공급하기 위하여 LM1117칩을 사용하여 5V전원을 3.3V, 1.8V, 1.2V로 다운시켜 공급해 주었다.
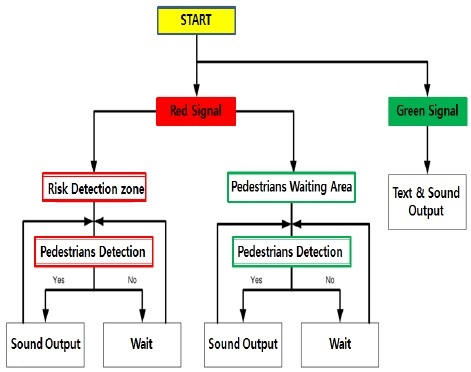
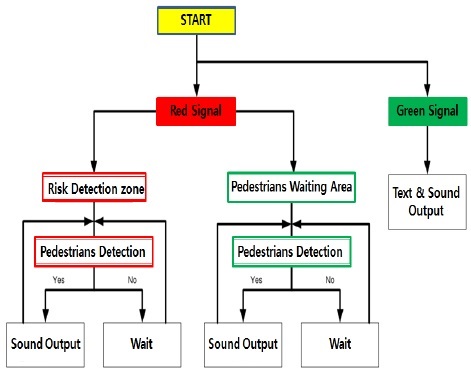
전자감응시스템은 우선 적색 신호 시 A구역(위험검지구역) 내에 보행자의 유무를 판단하여 보행자가 검지되면 “위험하오니 뒤로 물러서 주십시오.”라는 경고 음성을 출력하고, 보행자가 없을 시에는 대기모드 상태가 된다.
또한, B구역(보행자대기구역) 내에 보행자가 검지되면 “잠시 후 녹색신호등이 켜집니다.”라는 음성이 출력되며, 없을 시에는 대기모드 상태가 된다. 그리고 녹색신호 시에는 문자와 음성을 동시에 출력해준다.
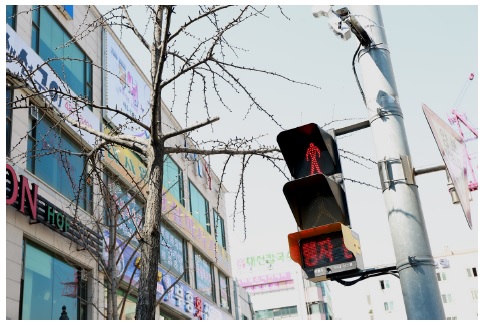
실험을 위해 실제로 횡단보도에 제안하는 시스템을 설치하여 실험하였다.
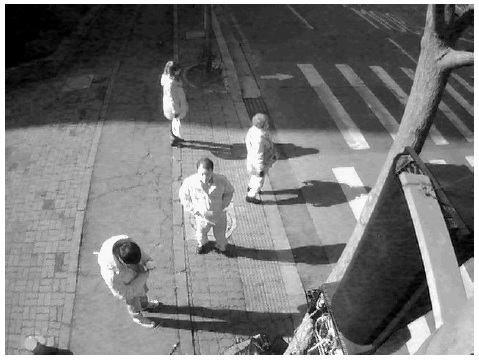
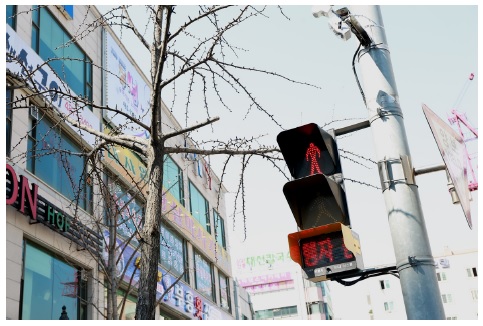
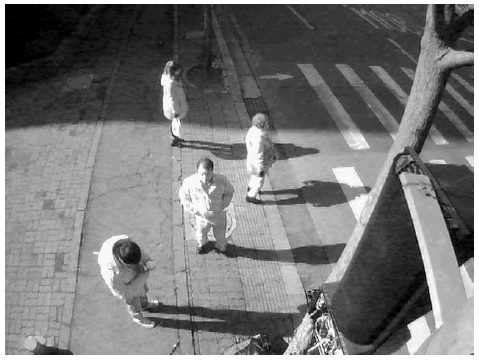
제안하는 처리 시스템의 흐름도는 그림 2와 같다. 그림 3은 실제로 현장에 설치한 화면으로 설치한 후 영상을 촬영하면 그림 4와 같은 영상을 획득할 수 있다. 보행자가 횡단보도 대기선 밖에 있는 경우 위험함을 알려주어 보행자가 뒤로 물러서게 만들어 위험으로부터 벗어나게 해주고 교통사고를 예방할 수 있다.
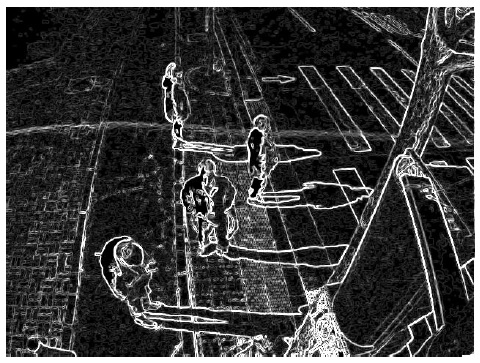
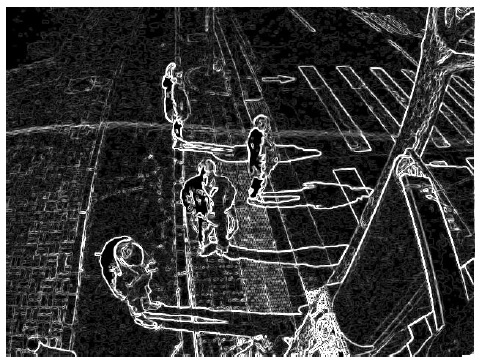
촬영된 영상은 소벨 영상으로 변환하여 영상 처리를 한다. 소벨 변환 영상은 그림 5와 같다. 소벨 변환된 영상 중 첫 번째 영상을 레퍼런스 이미지로써 기준을 잡고, 그 뒤에 촬영된 영상들을 비교하여 움직임에 의한 차이, 위치 데이터의 변화가 생겼을 경우 이를 보행자로 판단하여 인식한다.
본 논문에서는 카메라의 영상 검지 방식을 사용하여 보행자를 검지하는 방법에 대해 제안하였다. 이에 대해 다음과 같은 효과를 얻었다.
소리를 이용하여 차도에 가까이 있는 보행자들을 안전지역으로 이동시킨 실제 시스템 설치 운영결과, 많은 보행자들이 횡단보도에서 내려오지 않고, 안전한 지역에서 대기함을 관찰할 수 있었다. 주택, 상가와 학원들이 밀집한 지역에서 성인은 물론 많은 어린 학생들이 좀 더 안전하게 횡단보도를 이용할 수 있게 하는 결과를 얻었다.
그림 6은 현재 시범설치 운영 중에 있는 타사 시스템이다. 그림 6의 장치는 설치 비용이 많이 든다. 타 장치의 경우, 보행자 유무를 판단하기 위한 적외선 장비가 도로에 견고하게 부착되어야 하기 때문에 부가 비용이 많이 든다. 그러나 본 시스템의 경우 기존의 신호등 전신주에 설치함으로써, 설치에 많은 비용절감의 효과를 가져 올 것으로 기대된다.
고도의 경제 및 산업 성장과 과학의 발달로 인한 문명의 이기로서 여러 가지 변화가 발생 하여 왔다. 그 중에서도 가장 커다란 발전이라고 볼 수 있는 것 중 하나가 바로 자동차라고 할 수 있다. 자동차의 급증으로 교통사고로 인한 인적, 지적 재산피해도 많다. 본 논문은 횡단보도에서의 교통사고를 방지하고자 전자감응시스템을 개발하였다.
이는 카메라를 이용하여 횡단보도 구역을 촬영하고, 위험검지구역과 횡단대기구역을 설정하여 보행자를 검지하고, 위험검지구역에서 보행자가 검지되었을 경우 위험을 알려 보행자를 교통사고로부터 미연에 방지할 수 있도록 하였다.
본 논문은 현재 카메라를 이용하여 영상을 촬영 및 획득하고, 이를 비교하여 보행자를 검지하는 방식이다. 이것은 향후 보행자 수를 카운트하여 보행자의 왕래가 많은 시간대에는 보행신호 시간을 늘려주고, 보행자의 왕래가 적은 시간대에는 주행신호를 늘려주는 등의 기술에 접목할 수 있을 것으로 기대된다.