This research handles the performance improvement effect by the Modeling & Simulation and shows the design, implementation, test results of the new 3-axis magnetometer which is the core component of strategic offensive deploying mine. The submarine is modelled by using the commercial electromagnetic field analysis tool on numerical value, and its magnetic field characteristic is predicted in order to apply the new magnetometer to the future underwater weapon system. The method to take the performance test results of new 3-axis magnetometer in the land is shown instead of the real test result in sea by making the miniature submarine.
수중 무기체계의 주장약 폭발에 의한 함정 손상 등의 피해 위험성이 2010년 천안함 피폭과 침몰로 인해 전시뿐 만 아니라 평시에도 대단히 중요하게 다뤄져야하며, 그에 따른 방어대책 나아가 사전 억제 수단이 필수적으로 필요함을 인지하게 되었다[1].
본 연구에서는 다양한 수중무기폭발 체계 중 대표적인 비닉(庇匿) 무기체계인 기뢰를 중심으로 공격형 부설에 의한 억제 시 적함 탐지의 핵심이 될 자력계를 신규 Modeling & Simulation에 의해 성능 개선의 효과를 사전 검증하고 신규 자력계를 설계/제작/실험을 진행한 결과를 다룬다. 또한 신규 자력계를 새로운 신형 수중 무기체계에 적용하기 위해 상용 전자기장 수치해석 도구를 이용하여 전투용 수상함과 잠수함을 모델링하여 실 함정의 자기장특성을 예측하고, 축소 모형을 제작하여 실제 해상시험을 하지 않더라도 육상에서 성능검증할 수 있는 방법을 제시한다. 또한, 신규 자력계가 새로운 수중무기체계에 적용될 때 감응을 위한 최대 성능이 발휘 될 수 있도록 무기체계를 구성하는 강자성 추진체 등이 자력계에 감도 저하를 야기 시킬 문제점 등은 없는지 분석해 본다.
수중환경에서는 대기(大氣)중과는 달리 음향, 압력, 전자기장 등이 주 탐지원이 된다. 함정이 발생하는 특성신호에는 기계류 등에 의한 음향신호와 자기장 신호가 있다. 이중 계절에 따른 수온변화와 해저 저질 등의 영향에 의해 탐지 성능의 증감폭이 큰 음향센서와 달리 함정의 정자기장 신호는 해양 환경조건의 변화에 무관하고, 근거리 영역에서의 비교적 정확한 표적 탐지 및 식별이 가능하다는 장점이 있기 때문에 수중에서의 물체탐지는 음향, 압력센서와 더불어 강자성(ferromagnetic)선체에 의해 발생되는 정자기장 신호를 탐지하기 위한 자기센서가 주 탐지수단으로 사용되었다.
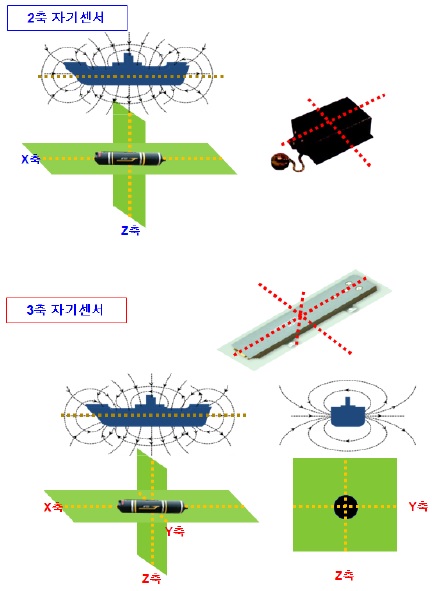
강철로 건조된 해군 함정들은 지구자기장에 의해 정수직하방(Positive Down, z축), 정 이물방향(Positive toward the bow, x축), 정 우현방향(Positive toward the starboard side, y축) 영향을 받는 3축 직교(orthogonal) 유도자기장(Induced Magnetic Field)과, 강철 선체에 기인한 3축 직교 영구자장(Permanent Magnetic Field)의 영향 하에 있게 된다.
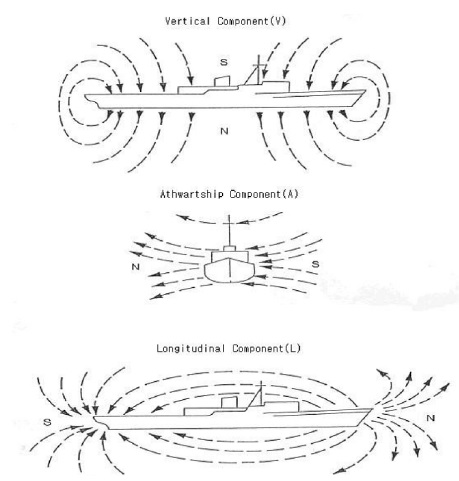
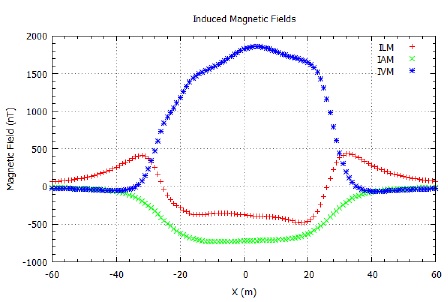
이들 3축 유도자기장을 각각 IVM (Induced Vertical Magnetization), ILM(Induced Longitudinal Magnetization), IAM(Induced Athwartship Magnetization)이라 하며, 다음 그림 1 을 통해 왼쪽으로부터 각각의 방향으로 해당 함정이 받는 유도자기장의 방향을 살펴볼 수 있다[2].
이에 반해 영구 자기장은 함정 건조 단계에서의 다양한 열적 및 기계적 응력 또는 외부 충격 및 폭발 등의 용인에 의해 영구적으로 생성되는 신호 성분으로 동일한 함종의 경우에도 상이한 특성을 가진다. 따라서 영구 자기장 성분은 상용 수치해석 도구 등을 사용해도 예측이 매우 힘들다.
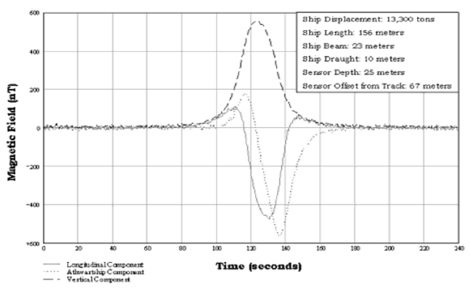
함정의 자기 특성 값은 각 축 벡터 값을 합성 값으로 하는 자기장 총합(FE) 수식으로 표현될 수 있다.

Ⅱ. 2축/3축 Modeling & Simulation
국산 전력화된 재래식 기뢰는 체계 개발 이후 전력화 운용 기간이 20년이 넘었다. 당시 적용된 자력계는 다음 그림 3과 같이 2축 뿐이며, 자항기뢰와 같은 신규 수중무기체계에 적용될 자력계는 3축의 합성자기장 값을 모두 이용하여 자기장 총합을 완벽히 구현할 수 있도록 성능개선 해야 하고 Matlab 기반 시뮬레이션을 통해 2축과 3축 자력계의 탐지성능 차이를 먼저 확인하였다.
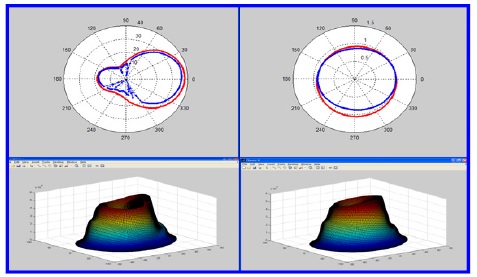
자력계가 탐지하는 대상함정은 수상함 전단 중 지휘함정에 해당하는 호위함급 이상의 크기를 갖는 대형함정으로 가정하고, 그 입력 값은 실측된 IVM, ILM, IAM, PVM, PLM, PAM 각 채널값을 사용했으며, 수중매설된 기뢰의 자력계를 on-top으로 함정이 지나가는 것으로 시뮬레이션 했고, 결과는 다음 그림 4와 같다.
자력계를 포함한 기뢰의 착저 자세가 동일하다고 가정하였을 경우 2출 자력계는 탐지 최대/최소 값도 편차가 있으며, 특히 방위별 탐지 가능 범위가 확연히 차이가 있음을 알 수 있다. 시뮬레이션을 토대로, 현존하는 기뢰의 대부분이 주 탐지 센서로 자력계를 사용하고 있지만 개발된지 오래된 구형 기뢰들이 대부분이며, 특히 우리나라가 보유하고 있는 기뢰들의 자력계는 단일 Search coil 또는 2축 뿐이며, 신규 무기체계로 자항기뢰 등을 개발하여 보유하려면 3축 자력계의 설계 및 적용이 필수적이이라 하겠다.
강자성 재질의 함정 선체에 의한 지구 자기장 외란(Anomaly) 신호는 다음과 식 2와 같이 맥스웰 방정식 및 자속밀도 와 자기장의 세기 사이의 구성 방정식의 영향을 받게 된다.

여기서, 는 전류 밀도,

일반적으로 대상 함정에 대한 자기 다이폴의 각 방향 성분별 크기(mx, my, mz)를 알고 있는 경우, 함정에 의해 발생되는 정 자기장 신호는 아래 식 4와 같이 비오-사바르(Biot-savart)의 법칙을 이용하여 임의 위치 및 심도별 자기장 신호 특성에 대한 예측이 가능하게 된다.

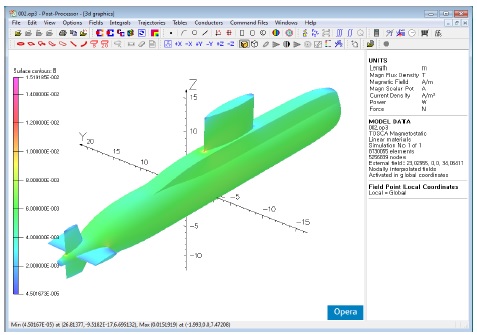
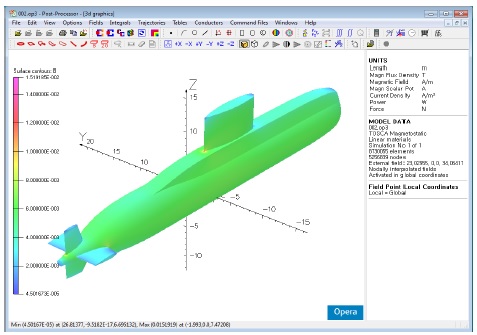
상용 전자장 유한요소 해석 도구인 OPERA를 이용하여, 해상 시험 진행전 적함 수중 전자기 신호 예측과 육상 확인시험용 축소모형 제작을 위해를 위하여 잠수함을 다음 그림 5와 같이 모델링하였다.
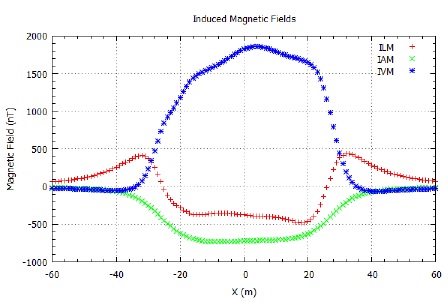
해석된 유도자기장 신호는 아래 그림 6과 같다.
이러한 함정 모델링을 이용한 해석 결과를 이용하여 적함의 수중 전자기 신호를 예측하고, 예측된 결과를 이용하여 신규 개발하는 3축 자력계의 자기 탐지 성능예측 및 분석에 사용한다.
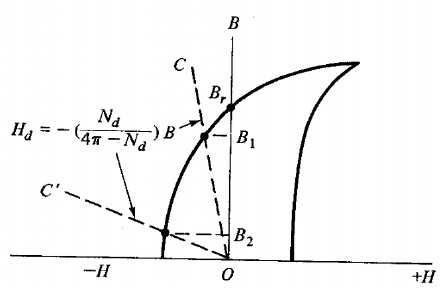
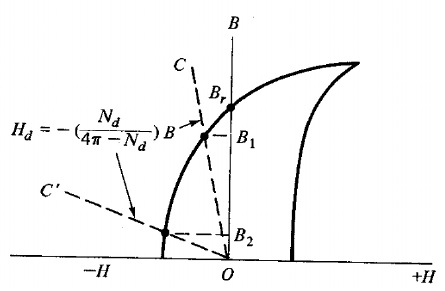
강자성체에 의하여 자기장을 변화시키는 원리는 첫째, 강자성체의 높은 투자율(permeability)에 의하여 자기력선이 강자성체에 빨려 들어가기 때문에 강자성체의 주변의 자기장의 세기가 불균일하게 되는 것과[3], 둘째, 강자성체 자체가 자화가 되어서 영구자석과 같이 균일 자기장이 분포하게 되는 것이 있다. 이들 자기장의 세기는 다음 그림 7과 같이 강자성체 자기이력곡선의 제2상한에서 강자성체 형상이방성에 의하여 결정되는 permeance line 에 의하여 결정된다. 즉 강자성체의 demagnetizing factor에 의하여 결정이 되며 자기장 방향으로 자성체의 길이가 길면 자화가 많이 높게 된다[4].
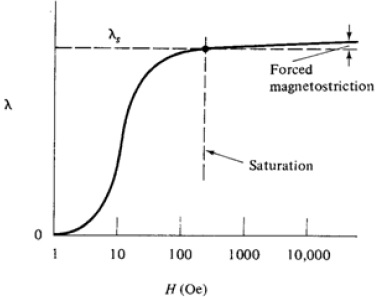
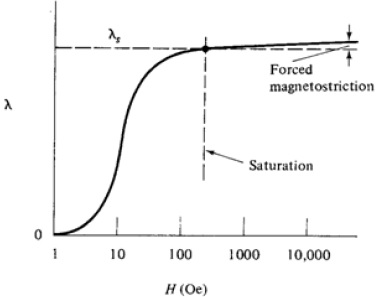
자성체를 자화시키는 방법은 외부에서 자기장을 인가시키는 것이 일반적인 방법이지만, 또 다른 방법으로는 아래 그림 8과 같이 Joule 효과라고 하는 자기변형(magneto-striction)을 이용하는 방법이다.
자기변형은 자성체가 자화 후 형상이 변하는 것으로 아래 식 5와 같이 정의 된다.

자기변형특성을 갖는 자성체에 외부에서 변형력(stress)를 인가하게 되면 자기 탄성에너지가

여기서 각도
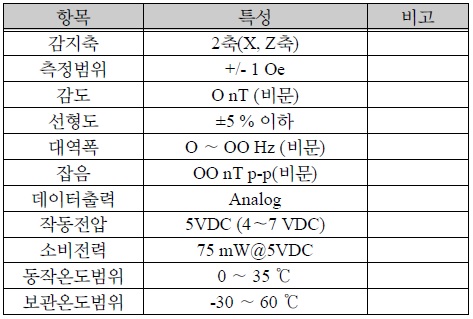
기뢰의 경우 일반적으로 오랜 기간(최대 연단위 이상) 동안 운용되므로, 자력계의 전력소모가 매우중요하다. 예전 자력계들의 경우 안정성이 우수하지 못하여 센서 코어를 자화시키는 전력소비가 문제였다. 그 예로 기존에 사용되었던 자력계인 기존 2축 자력계의 경우 flux-gate Brown 링형 자력계를 사용했으며, 감지축이 2-축이고 선형도가 5%, 분해능이 O nT, 측정 대역폭이 O∼O Hz(O:비문)였다.
flux-gate 센서는 링형 ferromagnetic core와 1차측 여기(Primary excitation) 코일과 2차측 측정(Secondary pick-up) 코일로 이루어 지며 코어는 주기적인 여기전류에 의해 코어의 투자율(permeability) 차이에 기인한 포화(saturation)을 반복하며, 측정코일에 의해 자기장 변화가 측정되는 원리를 갖는다[5]. 이러한 기본원리를 바탕으로 기존 2축 자력계는 다음 표 1과 같은 성능을 가졌다.
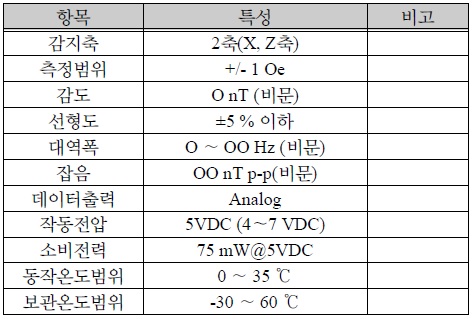
기존 2축 자력계 성능
한편, 최근 전자공학의 발달로 zero-drift 형 OP-Amp.가 많이 개발되었고, 온도에 따른 offset drift가 0.01
따라서 센서의 코일 권선, 코일포머의 열팽창계수, 전류를 측정하기 위한 shunt저항의 온도 계수를 최소화하면 측정하고자하는 시간에 전원을 켜서 측정을 하여도 수 nT의 변화 범위에서 측정이 가능하다.
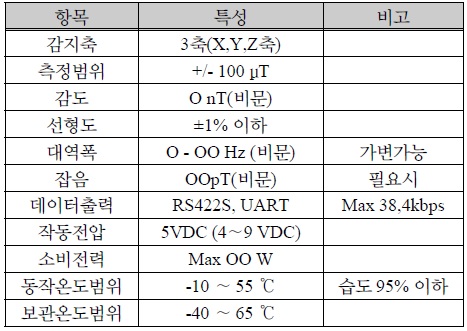
이런 이론적 분석결과로 Low drift를 갖는 신규 3축 자력계의 사양을 위 표 2와 같이 정하였다.
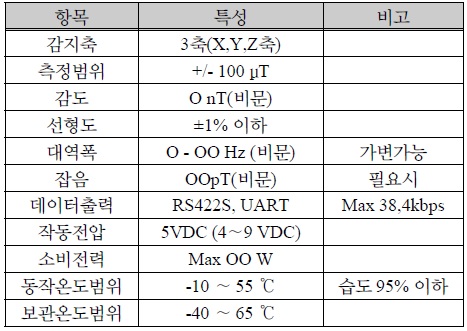
신규 3축 자력계 설계사양
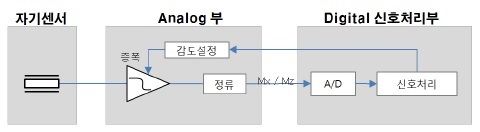
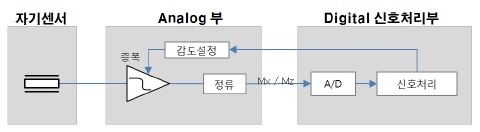
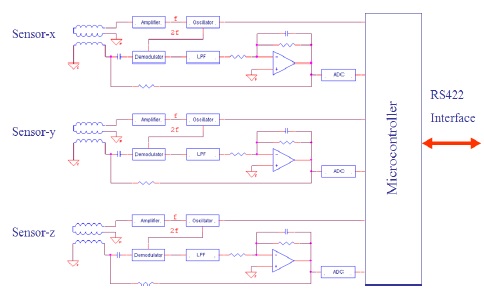
일반적인 자력계의 설계개념[6] 및 신호 흐름은 다음 그림 9와 같다.
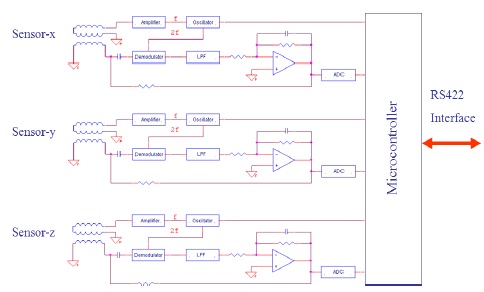
실 설계, 제작된 3축 자력계의 블록다이어그램은 그림 10과 같으며 출력을 RS-422 시리얼데이터로 전송하여 후속 기뢰 운용 알고리즘에 쉽게 활용토록 했다.
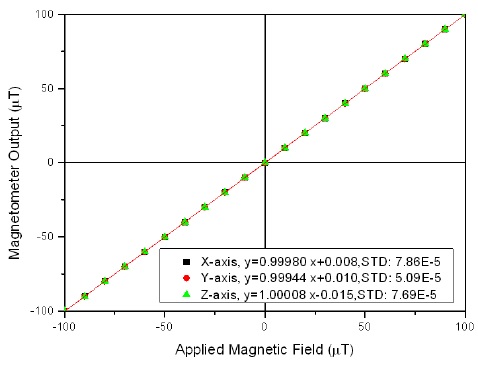
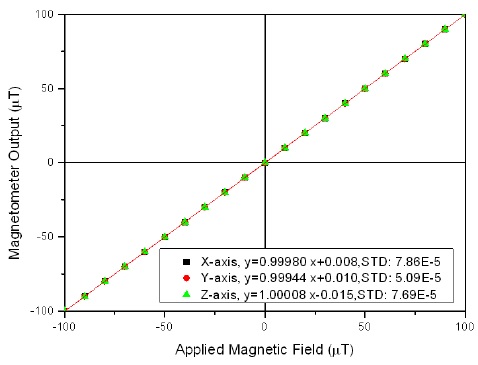
자력계의 성능 특징 중 중요한 점이 출력 신호의 선형성(Linearity)인데, 다음 그림 11은 신규 자력계의 선형성(Linearity)를 보여주고 있으며 이상적(ideal)인 신호출력의 선형 특징을 나타내고 있다.
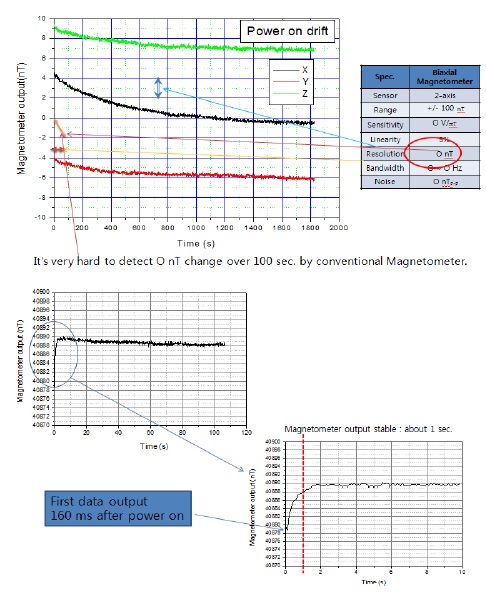
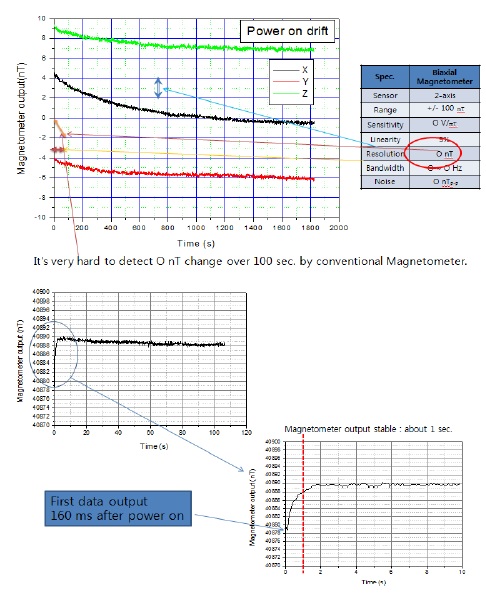
표적의 자기신호 변화를 감지해 내는 능력을 나타내는 신호 감도 면에 있어서는 다음 그림 13과 같이 O nT(비문)의 분해능을 가졌던 기존 2축 자력계에 비해 약 O nT(비문)의 분해능을 보임으로써 향후 실 해역에서의 탐지 효율이 획기적으로 개선될 것으로 기대되며, 실해역 시험을 통해 입증해 나가도록 할 것이다.
신규 설계/구현된 3축 자력계의 특성을 좀 더 자세히 살펴 보면, 신규 3축 자력계의 전원을 켬과 동시에 자력계의 출력전압 변화를 측정하여 본 결과가 그림 12와 같다. 전원을 켠 후 1000초 정도의 안정화 시간이 필요하지만 drift 가 가장 큰 x-축의 경우를 보면 200초에 2nT 정도 변화한다.
이를 기존 2축 자력계와 비교하여 보면 대역폭이 O∼OO Hz(비문) 이고 분해능이 O nT(비문) 는 100초에 O nT(비문)의 변화를 감지하지 못하는 것을 의미하기 때문에, 본 연구에서 사용한 자력계를 기존 2축 자력계를 대치하여 사용하여도 성능 면에서 아무런 문제가 없음을 보여주고 있다.
따라서 자력계의 전원을 계속 켜놓는 것이 아니라 필요시에 켜서 측정이 가능하기 때문에 시스템의 배터리 수명에 매우 긍정적인 영향을 줌을 알 수 있다.
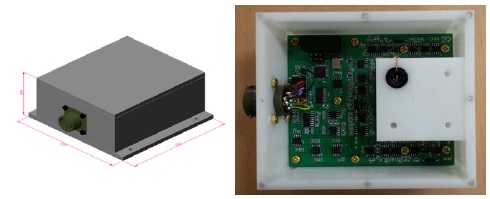
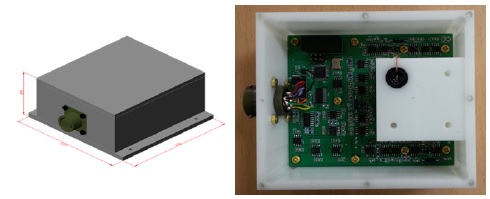
이렇게 설계/제작된 자력계의 프로토타입은 다음 그림 13과 같다.
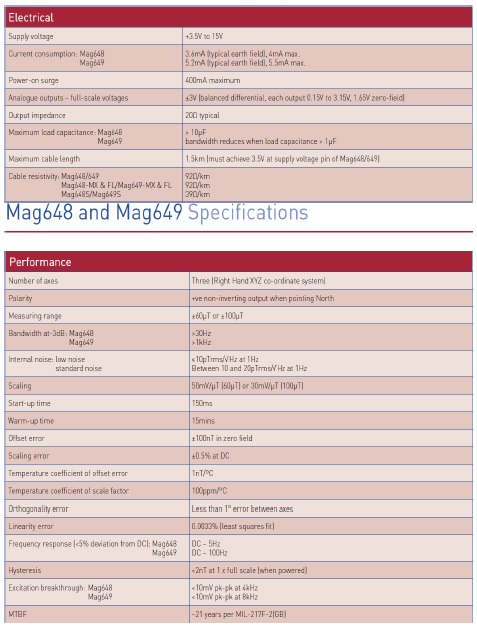
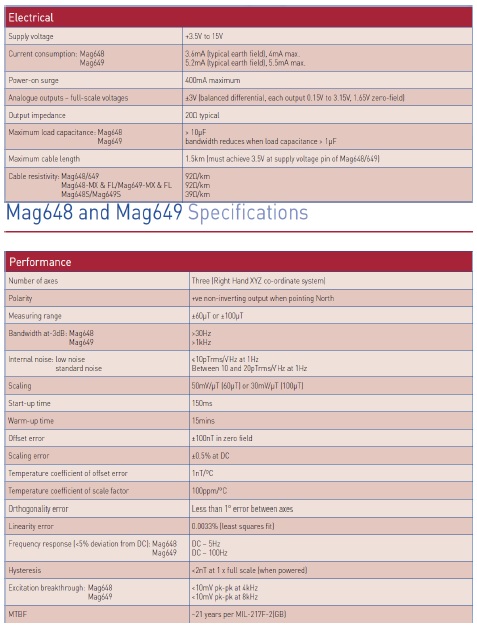
외국 유사 3축 자력계 중 국방 시스템 분야에 많이 사용된다는 영국 Bartington 사의 대표적인 저전력 플럭스게이트형 자력계의 기능 성능 특징은 다음 그림 14와 같다.
신규 자력계와 비교해서 측정범위 +/- 100 μT, 선형도 ±1% 이하, 초기 응답시간 150ms 내외등으로 비슷하나, 최종 출력이 아날로그 형태로 출력되며, 대역폭이 30Hz이상(Mag648), 1kHz이상(Mag649)로 저주파 대역에서는 상대적인 성능이 많이 떨어짐을 알 수 있다. 또한, 외국 유사 3축 Flux-gate type 자력계들은 기능, 성능을 비교할 때 소비전력 감소 측면에서 본 연구가 주목하고 있는 Power on Drift 보다는 아래 그림 15와 같이 long-term drift 즉 오랜 시간 측정했을 때의 자기 특성치 변화를 위주로 설계하는 경향을 확인할 수 있다[7].
설계, 제작된 신규 3축 자력계의 성능을 측정하기 위해서는 실 전투용 수상함정이나 잠수함 등을 운용하며 Beam depth(선폭의 길이와 동일한 수심 깊이)에서 실측하여 자기장 데이터를 분석하여야 한다. 그러나, 해상시험을 하기 위해서는 군 협조 및 동원되어야 하는 시험세력(표적함정 포함)을 운용하기에는 무리가 따르므로, 육상에서 축소형 모형함정을 만들고 데이터를 얻기 위한 스캔장치를 설계, 제작하여 신규 3축 자력계를 이용하여 지구자기장하에서의 분포변화를 측정하였다.
다만, 육상에서의 자기장 측정 시 유의할 점으로는 실험실의 지구자기장 분포가 균일하여야 되고, 자력계를 움직여가면서 측정을 진행하게 되면 기구적으로 완벽하지 못하여 yaw, roll, pitch 등의 오차가 발생하면 자기장이 변화하게 된다. 예를 들면 x-축을 중심으로 1°만 회전하여도 z-축 방향의 지구자기장 값이 y-축에 40,0000nT × sin(1°) 즉, 698 nT 가 변화하게 된다. 따라서 scan하는 동안 0.01도가 바뀌지 않게 설계를 하는 것이 매우 어렵기 때문에 본 연구에서는 피 측정 대상 물체(모형함정)가 움직이면서 자기장 분포를 측정하는 방법을 선택 하였다.
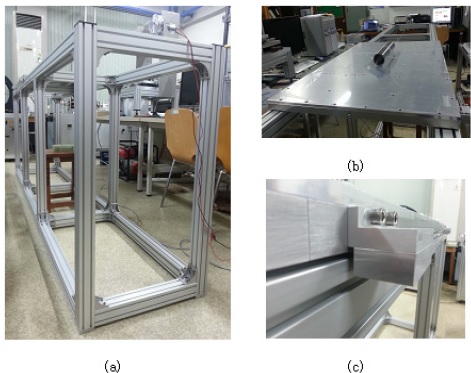
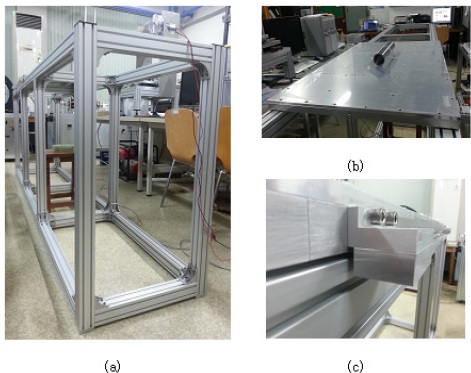
그림 16은 본 연구에서 제작한 스캔 장치의 사진으로 높이가 1000 mm, 폭이 600 mm, 길이가 3000 mm 되게 60 × 60 mm 의 알루미늄 프로파일을 사용하여 제작하였다. 구조물을 조이는 볼트 너트는 자기장에 영향이 없는 재질인 티타늄을 모두 사용하였다. 모형함정 등의 중량물을 이동하며 스캔하기 위해서는 베어링을 적용하여야 하는데 비자성체의 베어링이어야 하므로 세라믹 베어링을 사용하였다. 그림 16의 (c) 에서와 같이 각 모퉁이에는 2개의 세라믹 베어링이 붙어 있어서 수직의 하중을 받게 하는 것과 이송 중 이탈을 방지하기 위한 베어링이 부착되어 있다.
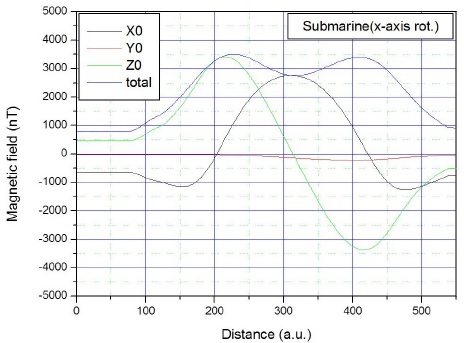
그림 17은 모형잠수함에 의한 지구자기장의 변화를 측정하는 사진이고, 그림 18은 그 측정결과이다. 이 실험에서 자력계는 함정으로부터 30 cm 아래에서 측정하였다. 여기서 x-축이 N-S 방향이고 y-축이 E-W방향, z-축이 수직 방향이다. 그림18에서 보면 x-축 방향의 자기장 변화가 4000 nT정도로 매우 큰데 이는 모델함정을 열처리를 하여 투자율이 냉간 압연시 보다 10배 정도 증가되었기 때문에 높아진 것으로 추정된다. y-축 방향의 자기장 변화는 거의 없고, z-축 성분은 대칭성을 보여주고 있다. 그림 18에서 자기장의 크기(total magnetic field)를 비교하여 보면 잠수함은 대칭이 잘되어 있음을 보여주고 있는데, 이는 특정 축의 자기장변화를 기폭시점으로 정하는 것보다 자기장의 크기를 추가하여 복합적으로 결정하는 것이 보다 더 정확도를 높일 수 있는 가능성을 보여 주고 있다.
2장의 시뮬레이션 결과처럼 2축 자력계는 착저 자세에 따라 탐지 방향별 자기장의 성분이 달라지므로, 2축만을 사용 할 경우 왜곡된 자기장 분포를 측정 할 수 있다. 따라서 자기장의 성분(X, Y, Z값)을 측정하지 않고 3축 자력계를 이용하여 Total field를 측정하면 기뢰의 착저 자세와 무관하게 측정이 가능하게 된다. 또한, 기존 2축 자력계는 Power on drift가 2nT/100s 이상이라서 초기 감응 후 알고리즘 등의 신호처리 시간 등을 고려하여 자력계에 상시 전원을 공급하고 자기장을 측정하였지만, 신규 3축 자력계는 Power on drift가 2nT/100s보다 작기 때문에 전원을 켬과 동시에 초기감응에 대응할 수 있으므로 자력계에 필요시에만 전원을 공급하여 동작전원의 소비 전력을 감소하는데 큰 도움이 되도록 설계 되었다.
기존 자력계의 경우 2축의 자력계를 사용하였고 이를 신규 무기체계에 그대로 적용할 경우 기뢰를 의도하는 위치와 방향으로 놓기가 매우 어렵다. 따라서 2축의 자력계가 임의의 방위각과 roll 각으로 위치할 때 자기감지 특성을 확인하여 보아야한다. 이를 위하여 모형잠수함으로부터 얻은 자기장 신호에 대하여 함 접근방향을 x-축, y-축, z-축 대하여 30° , 60° , 90° 회전시키면서 자기신호의 변화 결과를 살펴보면 x-축 회전에 의하여 Bz성분이 변화하고, y-축이나 z-축의 회전에 의하여 x-축의 자기장 값이 크게 변화하기 때문에 자력계가 놓여진 위치에서 무기체계의 roll 각 및 azimuth각을 알지 못하고 2-축의 자력계만을 가지고 함정의 중앙부분이 지나가는 것을 판단하는 것은 사실 불가능할 것으로 보인다. 따라서 3축 자기장성분을 측정 할 수 있는 자력계가 필수이다. 3축의 자력계를 사용할 경우 역시 어려운 점은 자기장의 크기를 측정하면 자력계의 회전에 관계없이 자기장의 변화를 정확히 측정 할 수 있으나 함정의 중앙부분을 정확히 찾아내는 것은 어려울 것으로 보인다. 이를 개선하려면 방위각센서를 사용하여 기뢰가 놓이게 되면 그 위치에서 roll과 azimuth 각을 측정하고 3축의 자력계 출력을 자북(x-축)을 기준으로 하는 회전 좌표계의 자기장 성분으로 분해하여 측정을 하면 Bx,By,Bz성분으로부터 함정에 의한 자기장변화를 정확하게 측정 할 수 있을 것으로 보이며, 추후 관련 연구를 진행하도록 한다.