This research was focused on the analysis of navigation parameters from the received L1, C/A signal of the recent GPS, which has advanced with the SA policy change and the GPS modernization policy by the United States. It was done as a first step study for a comprehensive analysis on the multiple satellite navigation systems which will be adding or separating GPS signal. In particular, the statistical analysis on the GDOP change and positional accuracy based on the geocentric and spherical coordinate systems were investigated with carrier- to-noise ratio and the satellite geometry, The obtained GDOP values of HDOP, PDOP, VDOP are 0.5, 1.2, and 1.1, respectively in deviation. In addition, the positioning accuracies with these GDOP values were analyzed in the ellipsoidal and ECEF coordinates.
2014년 6월 기준 작동 가능한 GPS(Global Positioning System) 위성은 32기이다. 이는 1974년 GPS 개발 당시 24개를 작동 목표로 했던 계획과는 차이가 있다. 더욱이 향후 미 국방부의 GPS 현대화 정책이 가속화되고 있는 상황에서 앞으로도 작동위성은 더욱 늘어 날 것으로 보이며, GPS의 성능개선과 더불어 군용을 비롯한 민간차원의 위성항법 활용도는 더욱 높아갈 뿐 아니라 다른 전세계 위성항법시스템들이 출현되고 있어서 사용자의 위성항법 선택에도 적지 않은 변화가 예상된다.
성능측면에서 GPS와 차이가 거의 없는 러시아의 GLONASS(GLObal NAvigation Satellite System)의 사용자 증가, 이미 10개 이상의 자국 항법위성을 궤도에 배치하여 부분적으로 사용되고 있는 중국의 COMPASS의 수년 내 전면운용, 예산상의 문제로 개발이 다소 늦어지고 있지만, 유럽연합의 꾸준한 Galileo 개발 진행 등 미국 외 전 세계 강대국들이 경쟁적으로 위성항법 개발 및 운용에 박차를 가하고 있는 실정이다[1-5].
GPS 외 전 세계 위성항법시스템 사용이 늘어나고 있는 상황에서 사용자 측면에서 전 세계 위성항법시스템의 개발을 선도적으로 이끌어 온 미국의 GPS 위성항법 시스템의 항법 파라미터 변화에 주목할 필요가 있다.
1995년 GPS 시스템 운용이후 GPS 기술개발, 정책변화 등이 있었지만 가장 괄목할만한 변화는 2000년 5월 1일 자정을 기하여 중지된 미국의 SA (Selective Availability) 정책과 이어서 단계적으로 추진되고 있는 미 정부의 GPS 현대화 정책을 기반으로 한 GPS 성능 개선정책이라 할 수 있다. 이는 고의적으로 사용자의 위치측정 정밀도를 떨어뜨리기 위해 위성 궤도 정보나 시각정보 등에 일정 크기의 오차정보 삽입을 중지함으로써 불특정 민간 사용자 수신기 성능에도 큰 변화를 가져왔다. 아울러 GPS 현대화 정책을 추진함으로써 군용은 물론 민간용 GPS 항법신호 성능 개선을 정책적으로 뒷받침 해 오고 있다[6].
본 논문은 GPS와 다중 또는 복합위성항법시스템의 수신 성능과 상관관계 등을 종합 분석하기 위한 1단계 연구로서 미국의 SA 정책 변화에 이어 지속적으로 추진되어 온 GPS 현대화 정책에 따른 최근의 민간용 수신신호의 항법 파라미터 분석에 연구의 초점을 두었다.
특히, 수신점에서 신호 추적이 되어 위치측정에 사용되고 있는 위성의 고각과 방위 등의 기하학적 배치에 따른 GDOP(Geometric Dilution of precision) 변화, 반송파잡음비 변화에 따른 지구중심좌표계 및 회전타원체좌표계 기반 3차원 위치정밀도 등에 대한 통계적 분석을 실시간 실험을 통해 얻은 자료를 이용하여 실시하였다.
GPS는 지구 상공 약 2만 Km에서 약 12시간 주기로 일정궤도를 선회 하는 GPS 항법위성에서 발사하는 궤도정보와, 측정된 위성과 수신기 사이의 의사거리 등으로 부터 형성된 비선형 연립정식에 근거하여 수신점의 실시간 3차원 위치정보, 시각정보 및 속도정보를 얻는다. 이때 수신기의 위치 정확도는 위성의 궤도오차, 전리층 및 대류권의 전파오차, 다중경로 오차, 위성과 수신기 시계오차 등에 영향을 받는다. 또 위성의 기하학적 배치 역시 최종적인 위치 정확도에 영향을 준다. 이와 같은 위성의 기하학적 배치에 따른 오차는 2차원 항법 위치 결정시 자이로컴퍼스 및 레이더를 이용한 교차 방위법에 의해 위치 측정을 할 때 방위측정 대상으로 선정된 물표의 방위각에 따라 오차정도가 달라지는 원리와 유사하다. 과거 고정된 송신국에서 항법신호를 발사하는 지상기반 전파항법 시스템의 경우 시스템 설계 전에 송신국의 위치가 항법시스템 사용영역 범위에서 송신국의 기하학적 배열이 어느 정도의 영향을 주는지 예측할 수 있었다.
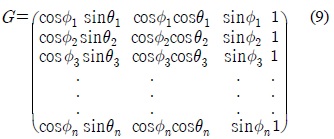
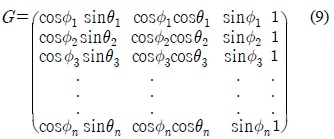
반면에 중궤도 선회궤도에서 항법신호를 발사하는 GPS와 같이 3차원 위치정보를 제공하는 전 세계 위성항법의 경우에는 송신국이 이동하고 있고, 항법신호의 크기에 따라 위치결정에 사용되는 항법위성이 수시로 바뀌기 때문에 우주공간에서 시간변화에 따라 달라지는 위성의 배열 위치에 따라서 위치정확도에 영향을 주는 정도가 달라진다. 본 연구를 위해 GPS 파라미터 분석에 필수적인 G행렬과 GDOP 위성배열 함수에 대한 이론적 고찰은 알려진 참고문헌을 토대로 아래와 같이 재정립 및 간소화하였다[7-9].
2.2. 수학적 고찰 : 위성배열과 기하행렬 G와 GDOP
GPS 수신기로 위치를 찾는 일은 ECEF 지구중심 좌표계에서 위치를 알고 있는 GPS 위성과 현재의 위치를 모르고 있는 수신기 위치사이의 거리측정부터 시작된다. 수신기에 입력되는 위성신호를 수신기에 내장 된 코드와 일치시켜 측정되는 이와 같은 거리를 의사거리(pseudorange)로 정의하며, 이는 위성과 수신기까지의 거리에 시계오차 거리를 포함하고 있으며, 식 (1)과 같이 표시되는 의사거리 방정식으로부터 출발한다.

여기서
우선 구하고자 하는 실제위치

식 (1)의 의사거리 식과 식 (2)의 근사의사거리를 간단한 함수로 표현하면 아래와 같다.

여기서 비선형 방정식의 선형화를 위해 근사위치에 대하여 Taylor 급수 전개를 한 다음 편미분을 하여 정리하면 식 (4)와 같은 선형화된 의사거리방정식을 얻을 수 있다.
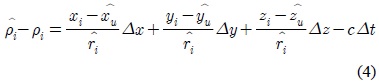
여기서 왼쪽 항은 수신기 실제위치를 대상으로 하는 의사거리와 추정근사위치를 대상으로 하는 의사거리의 차를 나타내며, 는 위성과 추정근사위치와의 공간상의 거리를 나타내고, 오른쪽 각각의 항은 수신기의 추정근사위치에서 위성
상기 선형방정식에서 GPS 위성 4개가 위치결정에 사용 된다고 가정 할 때, 미지수는 위치 보정치
식 (4)는 위성




여기서
위의 의사거리 방정식에 대한 상태방정식으로부터 위치오차는 최소자승법이나 칼만 필터 기법 등을 이용하여 계산이 가능하며, 위치오차 공분산은 식 (10)과 같이 기댓값 연산자

여기서 위성 각각이 상호 독립적이고 의사거리오차가 평균이 0이고 분산이 일정한 가우시안 확률변수라고 할 때, 위의 위치 공분산은 식 (11)과 같이 간단하게 표시 가능하다.

위 식에서 위치오차 분산의 크기는 거리오차 분산과 위성배열의 기하학적 행렬 G로부터 얻어지는 위성배열 상태인 GDOP 함수로 알려진 [
따라서 앞에서 언급한 바와 같이 GPS 수신 실험에서 얻어지는 위치오차는 상기식의 거리오차 분산에 기본적으로 포함되어지는 전리층, 대류권 등 전파 경로상의 오차, 다중경로 오차 등의 거리오차와 위성궤도에서 주기적으로 이동하는 위성들의 순간 위치에 따라 달라지는 즉 위성배열상태에 영향을 받음을 알 수 있다. 또한 스칼라 양으로서의 2차원 GDOP인 HDOP(Horizontal DOP) 및 3차원 PDOP(Position DOP) 크기는 [
본 실험을 위해 사용되는 장치는 U-BLOX 멀티 GNSS 수신기[11] 복합 안테나, 데이터분석 소프트웨어 및 컴퓨터로 구성하였다. 실험 장소는 한반도 서남 해역인 목포지역을 택하였으며, 실험목적에 맞도록 정적인 테스트를 기반으로 실시간으로 변하는 위성배열 상태와 반송파 잡음비 변화에 따른 GDOP 변화와 항법파라메타를 분석하기위하여 비교적 단기간 간격으로 얻은 신호 데이터를 이용하였다.
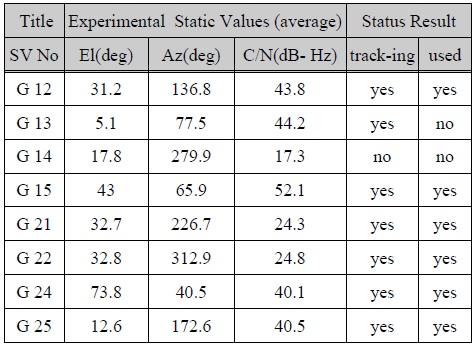
표 1에서 보는 바와 같이 실험기간 중에 추적 된 위성은 G12, G13, G14, G15, G21, G22, G24, G25 8기였고, 이 중 G14를 제외한 7기의 위성이 위치측정에 사용되었다.
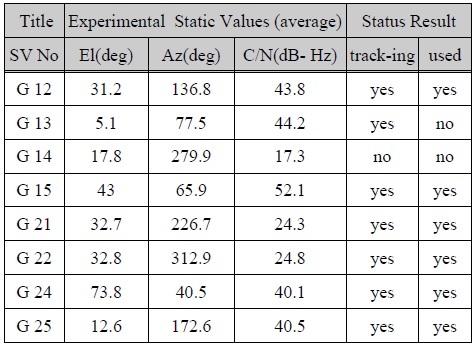
위성의 기하학 및 C/N 비
신호추적과 위치측정에 사용된 위성 중 특이사항을 살펴보면, 위성 G13의 경우 C/N(Carrier-to-Noise ratio) 평균값이 44.2 dB로 비교적 큼에도 불구하고 고각이 5.1 도로 낮은 경우 신호 추적은 되었으나 위치측정에는 사용되지 못했음을 알 수 있었다. 또한, 위성 G25번의 경우에는 고각이 비교적 낮더라도 일정 수준의 C/N 값만 확보되면 신호추적은 물론 위치측정에 사용 될 수 있음을 확인하였다.
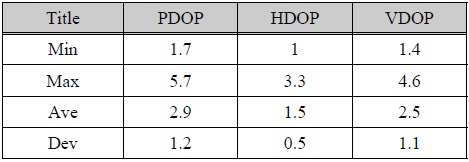
위치측정에 사용 된 7기의 위성으로 부터 현재의 위성의 상태를 고려하여 4개씩 다양한 조합으로부터 측정된 위치의 정밀도의 척도가 되는 PDOP를 비롯한 다양한 GDOP 값을 얻을 수 있다.
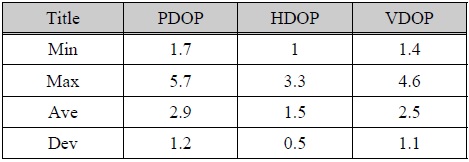
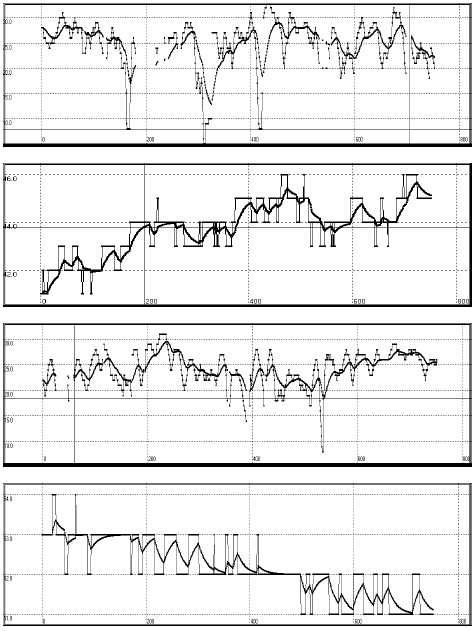
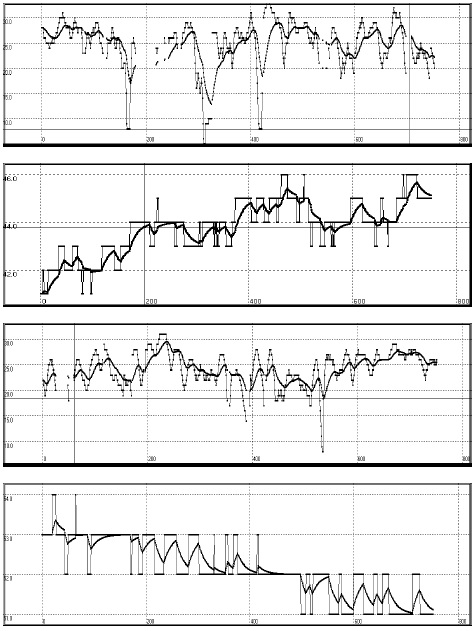
표 2에서 보인 바와 같이 실험 중 실시간으로 얻은 위성위치로부터 얻어진 PDOP 평균값은 2.9, HDOP 평균 값은 1.5, VDOP(Vertical DOP) 평균값은 2.9로 나타났다. 그림 1에는 위치측정에 사용된 위성 중에서 평균 고각 및 C/N 값을 고려하여 GDOP 값이 비교적 양호할 것으로 추정되는 하나의 위성조합에 포함 된 G12, G21, G22, G24 위성신호의 C/N 측정치를 순서대로 나타내었다.
측정된 GDOP 값
4개씩 조합을 이루는 위성은 의사거리 결정방식의 기지수 데이터를 제공하게 되고, 이를 토대로 비선형 연립방정식의 해인 ECEF 기반의 위치가 얻어진다.
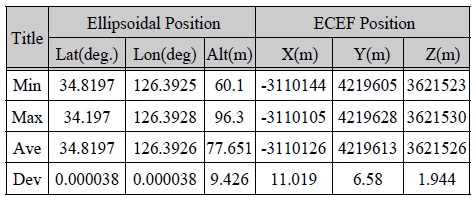
실험에 의해 얻어진 값으로는 표 3에서 보는 바와 같이 회전타원체 위치의 평균값은 위도, 북위 34.8197도, 경도 126.3926도, 고도 77.651m로 나타났으며, 편차의 경우 위도 0.000038도, 경도 0.000038도, 고도 9.426m로 나타났다. 한편 ECEF 기반으로 (평균기준) X 축으로 -3110126m, Y축으로 4219613m, Z 축으로 3621526m 나타났으며, 편차는 X 축 11.019m, Y축 6.58m, Z축 1.944m로 측정되었다. 이들 값들을 이용하여 구한 항법정밀도 및 신뢰도는 ECEF 기준으로 할 때 2DRMS의 경우 25.6m를 얻었다. 회전타원체 기준으로 항법정밀도 및 신뢰도를 구했을 경우 2DRMS 20.89m를 얻었다. 여기서 ECEF와 회전타원체를 기반으로 할 때 정밀도에서 차이가 나는 이유는 GPS 수신기에 내장 되어있는 좌표변환 과정에서 나타나는 현상으로 보인다.
[표 3.] 회전타원체 및 지구중심좌표계에 대한 위치 정밀도
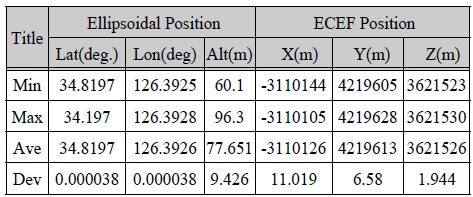
회전타원체 및 지구중심좌표계에 대한 위치 정밀도
본 논문은 GPS와 다중 또는 복합위성항법 시스템의 수신 성능과 상관관계 등을 종합 분석하기 위한 기초연구로써 미국의 SA 정책 변화에 이어 지속적으로 추진되어 온 GPS 현대화 정책에 따른 최근의 민간용 수신신호의 항법 파라미터 분석에 연구의 초점을 두었다. 위성의 기하학적 행렬 G와 GDOP 이론 재정립과 이를 토대로 실측에서 얻은 위성신호에 대한 결과분석을 통하여 지속적으로 진화 해 온 범용의 L1, C/A 항법 신호에 대한 주요 파라미터 분석을 하였다.
본 논문에서 실시한 실험 조건하에서 통계적 개념의 편차로 PDOP 1.2, HDOP 0.5, VDOP 1.1을 얻었고, 이에 상응하는 ECEF 좌표상의 편차는 X축 11m, Y축 6.58m, Z축 1.9m로 나타남을 확인하였다. 또한, 항법신호 측정 장소에 따라 다소 다를 것으로 예상되지만, 심하게 시야가 가려지는 계곡이나 도심지를 제외하고는 일반적으로 보통의 경우 7-8개의 위성신호 추적이 항상 가능 할 것으로 판단된다. 특히, GPS항법 이론을 기반으로 실시간 실측을 최신의 항법 통계분석 도구를 이용하여 주요 파라메타 분석을 하였는바, 본 논문에서 얻은 결과와 과정들을 바탕으로 향후 다양한 실험환경, 다른 GNSS 수신 실험, 통합 다국적 GNSS 성능이나 특성 분석을 계속 할 예정이다.