In this paper, we proposed a forest fires prediction and detection system. It could provide a situation of fire prediction and detection methods using context awareness sensor. A fire occurs wide range of sensing a fire in a single camera sensor, it is difficult to detect the occurrence of a fire. In this paper, we propose an algorithm for real-time by using a temperature sensor, humidity, Co2, the flame presence information acquired and comparing the data based on multiple conditions, analyze and determine the weighting according to fire in complex situations . In addition, it is possible to differential management of intensive fire detection and prediction for required dividing the state of fire zone. Therefore we propose an algorithm to determine the prediction and detection from the fire parameters as an temperature, humidity, Co2 and the flame in real-time by using a context awareness sensor and also suggest algorithm that provide the path of fire diffusion and service the secure safety zone prediction.
2000년 중반 이후 세계적으로 이상기후 발생 빈도가 증가함에 따라 빈번한 산불 발생 및 산불의 대형화 사고가 자주 발생하고 있다[1]. 국내에서도 전국 평균 한달에 6,500여 건 정도의 화재가 발생하고 있고, 이에 대한 인명, 재산 피해 또한 발생하고 있다. 화재에 대한 피해를 줄이기 위해서는 사전예방이 가장 우선시 된다. 하지만 사전 예방을 시행함에도 불구하고 발생한 화재에 인명, 산림피해가 지속적으로 발생하고 있다.
우리나라의 경우 사계절이 뚜렷하고 주기적으로 변동하는 계절적인 영향으로 인하여 여름철에 고온, 다습하고 겨울철에는 저온, 저습한 특징을 가지고 있으므로 이런 환경에서 고온, 다습한 여름에 화재 발생 건수가 감소하고 저온, 저습한 겨울철에 화재 발생 건수가 점차 증가하는 경향을 나타내고 있다. 이와 같이 화재 발생과 관계가 있는 인자로 기상을 들 수 있으며, 특히 습도와 온도는 화재에 큰 영향을 준다[2].
전 세계적으로 기상 정보를 수집하여 화재를 판단하는 알고리즘 및 시스템에 관한 연구와 산불 위험예보지수를 개발하기 위해 지역별 산불통계 자료와 관련인자를 분석한 결과를 이용한 연구가 활발히 진행되고 있다[3]. 기존 연구에서는 온도, 습도 정보를 센싱하여 화재기준값과 비교하여 화재를 판단한다[4,5]. 하지만 단순히 온도와 습도를 통해 화재를 판단하는 경우 정확한 화재 판단이 어렵고 지역의 특성, 계절, 시간 등 복합적인 상황을 고려할 경우 정확한 화재 판단이 어렵다. 또 국내에서의 산불예방 활동은 기초 자치단체, 시·군·구의 산불통계 자료와 연소면적, 확산속도, 건당 면적 자료를 이용한다. 이를 토대로 산불특성에 따라 군집을 분류하고, 그 결과를 GIS에 표출한 연구 결과를 보였다[6]. 다른 연구에는 국내지역 일대를 대상으로 산불피해 지역과 임상, 지형 인자와의 관계를 분석한 연구가 존재한다[7]. 해외 연구로는 ROTHERMEL 모델과 호이겐스의 원리에 기초하여 산불확산모델을 정의하고 있다[8]. 이를 보면 실제 산불 발생 좌표와 경계를 이용하여 산불 발생과 확산에 대한 분석을 시도한 연구는 많이 부족한 상황이다.
본 논문에서는 화재가 발생한 상황에서 화재와 가장 밀접한 관계가 있는 요소인 온도, 습도, 이산화탄소, 불꽃의 여부를 확인하여 화재를 감지하는 알고리즘과 산불 감지 노드의 좌표를 이용하여 효율적으로 산불의 이동경로 및 이동속도를 예측하는 알고리즘을 제안한다. 이를 통해 복합적인 상황에 맞춰 각 요소에 가중치를 다르게 설정함으로써 화재 감지의 신뢰성을 확보하고 예측된 산불의 이동경로와 이동송도에 따른 안전구역 의 확보로 신속한 화재 진압 및 대피 작업에 도움이 되는 자료를 제공할 수 있다.
온도, 습도 데이터 분포를 기반으로 화재판단 주기를 동적으로 설정한다. 설정된 주기 동안의 온도 변화를 기준 값과 비교하여 화재를 판단한다. 또한, 화재가 발생한 상황에서 온도상승이 유지될 경우 변화량이 기준값을 초과하지 않으므로 화재임을 알 수 없으므로 임계값 이상인 경우에도 화재 상황으로 판단한다[4].
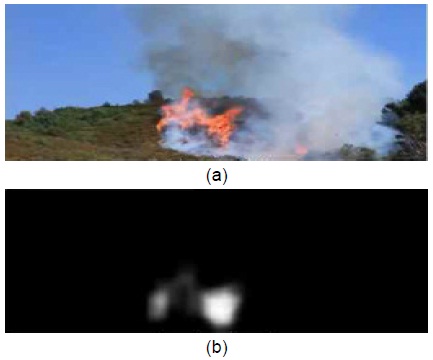
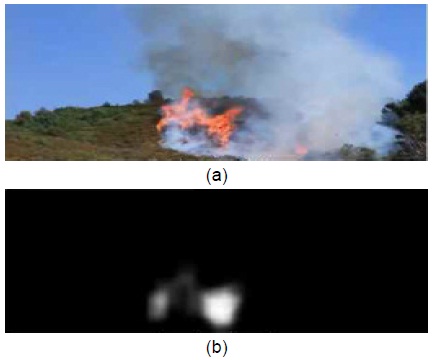
그림 1과 같이 산불의 색상 특징을 기반으로 히스토그램 모델을 만들고, 입력 영상 전체에 패치 윈도우를 이동시키면서 윈도에 포함되는 부분의 히스토그램과 산불 특징 히스토그램을 비교한 화재 감지 시스템이다. 프레임 당 처리 시간은 0.03초 이내로 빠른 처리 결과를 얻을 수 있다.
하지만 경제적인 문제로 단일 카메라 모듈의 넓은 범위를 감지할 수밖에 없고, 이 경우 역투영이 이루어지기 힘든 화재의 초기 단계일 때는 화재를 판별하기 어려워 화재가 발생했음에도 카메라 센서가 화재를 감지 하지 못하는 경우가 발생한다.
산불 이동과 관련된 알고리즘을 적용하여 안전한 대피소까지 최단거리를 구하는 연구가 진행 되었다. 기존연구는 산불이 발생했을 경우 발생 장소와 인접하게 거주하고 있는 재해 약자들이 쉽게 대피소를 찾아 갈 수 있도록 알려준다[9].
이 때 최단거리 경로를 구하는 알고리즘은 방향성이 없는 출발지점과 도착지점 사이의 최단경로를 계산할 수 있는 dijkstra Algorithm을 적용했다. 하지만 최단경로 알고리즘은 단지 대피소로 이동하는 안전한 경로만 을 제시해줄 뿐 산불이 어디서 발생됐고, 언제 어느 방향에서 자신의 거주지로 확산되는지 알지 못하는 문제점이 있다.
본 논문에서 제안하는 화재 감지 알고리즘은 크게 두가지로 나뉜다. 먼저, 첫째로는 복합적인 상황에 따라 가중치를 다르게 주는 방식으로 신뢰성 있는 화재 감지를 하며, 화재의 상태를 3간계로 나누어 화재 발생 위험 지역에 차별성 있는 화재 감지를 할 수 있다. 두 번째는 앞서 구한 화재 상태를 바탕으로 화재의 진행방향을 예측하는 알고리즘으로 화재의 이동속도와 이동방향으로 구성된다.
기존 연구들은 인근 거주자들이 최단거리를 통해 대피소로 대피할 수 있는 알고리즘을 제시하였다. 하지만 기존 연구들은 축적된 자료들을 토대로 예측모델을 작성하기 때문에 실제 화재가 발생 했을 시 화재의 이동방향과 이동속도를 알지 못하는 문제점이 있다. 화재의 이동방향과 이동속도를 예측할 수 있다면, 인근 거주자들이 대피에 대한 유무, 대피를 완료해야 하는 시간 등을 알 수 있다. 제안하는 알고리즘은 온도감지노드를 통해 추출된 데이터와 온도 변화량, 시간차를 이용하여 기존 알고리즘의 문제점을 해결한다.
본 논문에서 제안하는 화재 감지 알고리즘은 센싱 주기에 따른 온도, 습도, 이산화탄소의 변화량을 분석하는 기법이며, 상황에 따라 다른 가중치를 곱해 복합적인 상황의 화재를 감지할 수 있다. 화재 감지 알고리즘 다음 식(1)과 같다.


여기서,
본 논문에서 센싱하는 데이터는 온도, 습도, 이산화탄소에 한정되어 있지만 추가로 화재와 관련된 요소를 센싱하고 싶은 경우 데이터 값과 특정 상황에서의 가중치를 구해 알고리즘에 적용할 수 있다. 또한, 가중치에 대한 조절이 가능함으로 특정 장소나 환경에 국한하지 않고 광범위한 상황에 적용 가능하다.
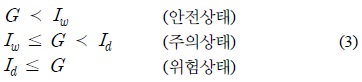
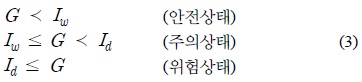
식(3)과 같이 안전 상태는
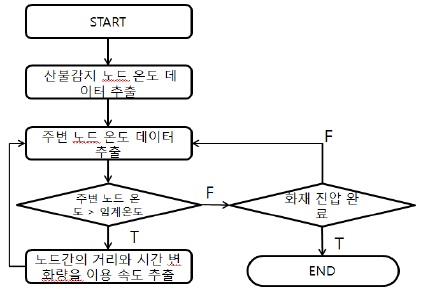
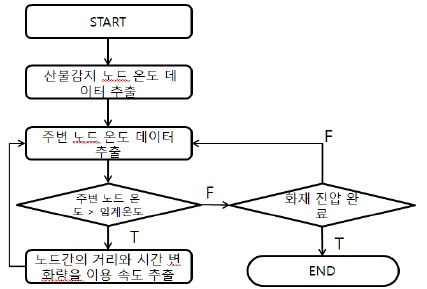
본 논문에서 제안하는 화재 이동속도 분석 알고리즘은 각 노드 사이의 거리와 화재의 영향이 미치는 시간차를 이용하여 화재의 이동속도를 예측하는 알고리즘이다. 최초의 화재 감지 노드는 화재 발생 시 화재 지역 위치를 생성한다. 화재지역 주변 노드들은 생성된 좌표를 이용하여 온도 데이터를 수집 한다. 또한, 수집한 온도데이터를 이용하여 화재지역을 분석하고, 주어진 임계온도와 비교하여 화재지역을 예측한다. 임계온도의 초과 시점과 시간차를 분석하여 화재의 이동속도를 계산한다. 화재이동속도 분석 알고리즘 순서도는 그림 2와 같다.
화재 이동방향 알고리즘은 화재의 영향력을 노드의 온도변화량으로 가정하고 화재와 노드사이의 거리 비율을 이용해 이동방향을 예측하는 알고리즘이다. 제안하는 알고리즘은 화재진압을 위한 안전구역을 확보하기 위해 화재의 이동방향과 속도를 이용하여 인근 마을이나 사람이 거주하고 있는 지역에 화재가 접근하는 것을 예측한다.
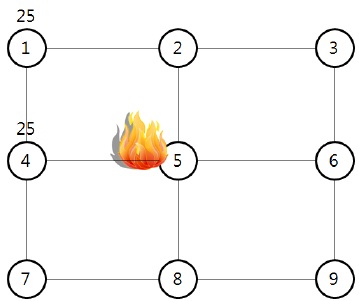
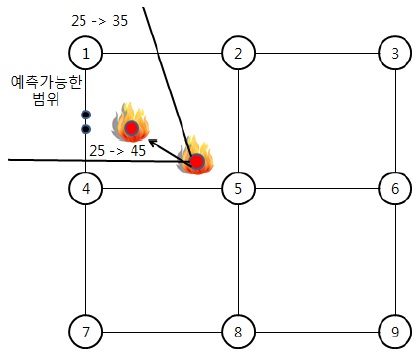
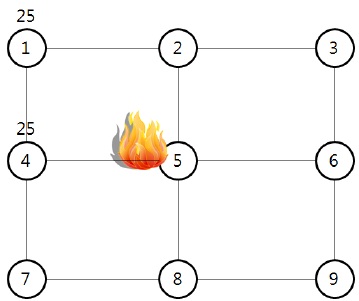
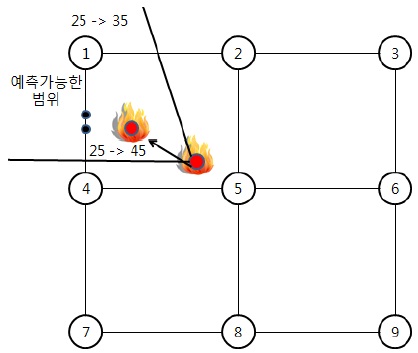
그림 3은 초기 화재 발생 시 주변의 온도데이터를 생성한 그림이고, 그림 4은 온도 변화량에 따른 거리의 비율을 이용하여 화재의 이동방향을 예측한 것을 표현한 그림이다.
그림 4에서 보는 바와 같이 노드 1번의 온도변화량은 10도이며, 노드 4번의 온도변화량은 20도 이다. 화재로부터 받은 에너지의 크기의 비율이 1:2이기 때문에 화재와의 거리가 2:1이라고 예측이 가능하다. 다음 화재의 이동방향에 따른 비율을 노드 1번과 4번을 잇는 직선에 표시하면 예측 가능한 범위가 설정된다. 따라서 다음 노드까지의 화재의 이동방향을 예측할 수 있다.
안전구역 확보 알고리즘은 화재 이동속도 알고리즘의 결과와, 화재 이동방향 알고리즘의 결과를 통하여 화재 발생구역 내 위험 구역과 안전 구역을 구분하고, 시간 별 화재 위치 변화에 따라 안전구역을 새로이 확보 하는 알고리즘이다.
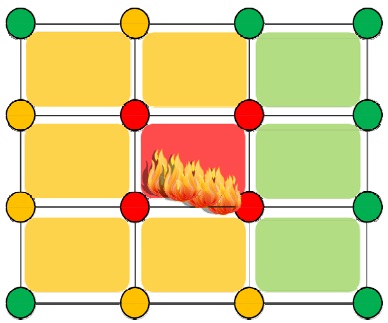
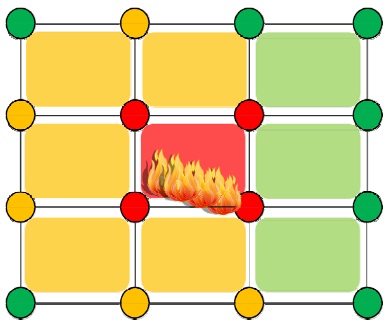
안전구역 확보 알고리즘은 먼저 화재 이동방향 알고 리즘과 화재 이동속도 알고리즘이 실행되어 화재의 이동방향과 이동속도를 알게 되고, 식별된 방향, 속도 인자에 따라 해당 지역 노드들을 중심으로 구역이 설정된다. 각 구역은 적색(위험), 황색(주의), 녹색(안전) 상태로 구분된다.
그림 5에서 보는바와 같이 화재 이동방향 알고리즘과 이동속도 분석 알고리즘에 따라 각 노드 위치 좌표위험등급이 정해진다. 4개의 노드 위치 좌표마다 구역이 생성되고 좌표의 위험등급들에 의해서 구역 상태가 정의된다.
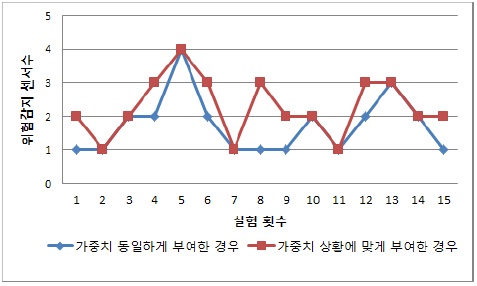
본 논문에서 제안하는 화재감지 알고리즘의 효율성을 증명하기 위하여 화재를 감지하고 화재 상태의 정확성을 확인하기 위하여 시뮬레이터를 제작하였다. 사용한 시뮬레이터는 C# 언어로 작성 되었으며 화재 발생지역 설정을 통해 화재 상태를 Green, Yellow, Red의 3가지 색으로 표시하여 화재의 상태를 확인한다. 시뮬레이션은 요소별 가중치를 다르게 부여함으로써 정확한 화재감지가 가능하다는 것을 증명하려 한다.
상황 1은 온도, 습도, 이산화탄소의 가중치를 모두 같게 설정한 경우이고 상황 2는 온도, 습도, 이산화탄소의 가중치를 다르게 설정한 경우이다. 실험 환경은 4월 30일 맑은 날의 일주일 간 서울의 오후 3시경의 온도, 습도, 이산화탄소의 평균값을 바탕으로 시뮬레이션 하였다. 시뮬레이션 상황은 화재로부터 거리가 가까울수록 온도의 변화량이 크기 때문에 온도에 대한 가중치를 높게 설정하고 화재와의 거리가 먼 경우 확산속도가 빠른 이산화탄소의 가중치를 높게 설정하였다.
다음 표 1은 요소별 최대 변화량에 따라 임계 기준 값온도 2.5℃, 습도 7%, 이산화탄소 100ppm 로 설정하고계산한 비례상수를 보여준다.

요소별 비례상수
다음 표 2는 주의, 위험 상태를 나타내는 기준 값으로 요소별 최대 변화량이 된 경우 주의 상태, 그보다 2배 더 큰 값이 된 경우 위험 상태의 임계값으로 설정하였다.

화재 상태에 대한 임계값
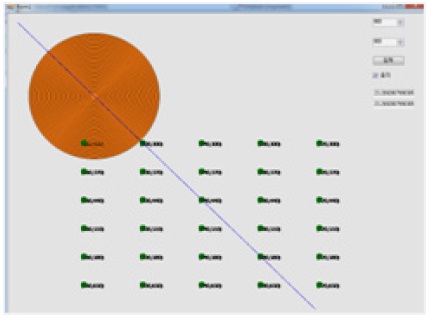
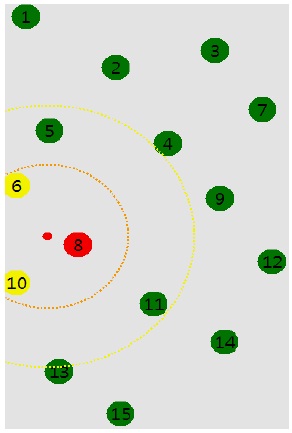
다음 그림6은 상황에 따른 가중치를 모두 동일하게 부여했을 경우 임의의 구역에 화재를 발생시키고 이를 감지하는 15개의 센서 모듈을 보여 준다.
그림 6에서 보는바와 같이 주황색 원은 화재위험범위에 대한 표시이고 노란색 선은 화재주의범위에 대한 표시이다. 그 결과 주의상태를 감지한 모듈은 2개, 위험상태를 감지한 모듈은 1개임을 확인할 수 있다.
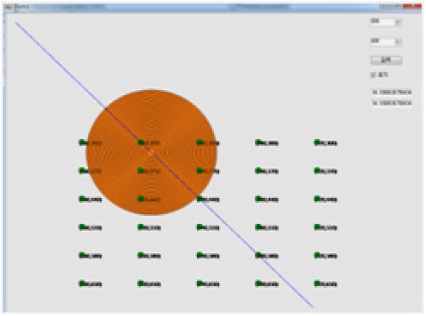
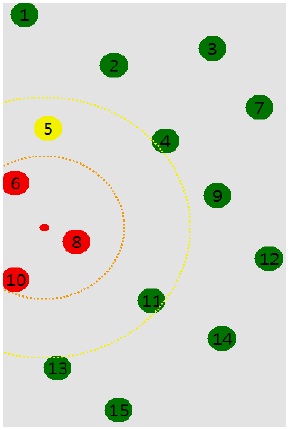
다음 그림7은 가중치를 상황에 따라 다르게 부여한 경우에서 센서모듈을 나타낸 것이다.
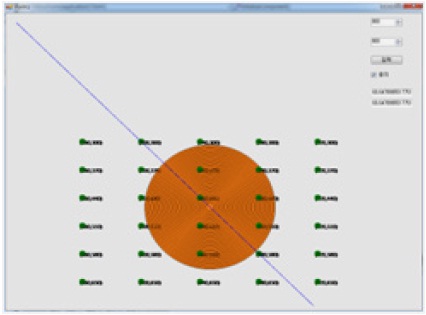
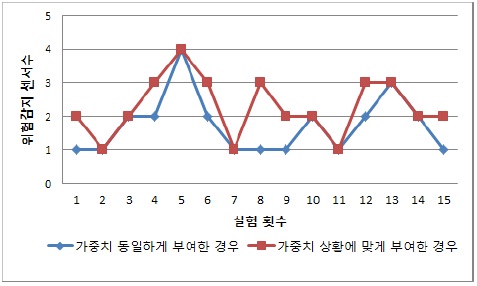
그림 7에서 보는바와 같이 주의상태를 감지한 모듈은 1개, 위험상태를 감지한 모듈은 3개임을 확인할 수 있다. 다음 그림 8는 화재발생 위치를 다르게 설정하여 화재를 감지하는 센서의 수를 파악한 결과를 보여 준다.
그림 8에서 보는바와 같이 가중치를 상황에 맞게 부여한 경우 화재 범위 안에서 많은 센서모듈이 화재를 감지하는 것을 확인 할 수 있다. 그러므로 정확한 화재감지가 이루어짐을 보여 주고 있다.
4.2. 화재의 이동속도 예측 및 안전구역 확보 알고리즘
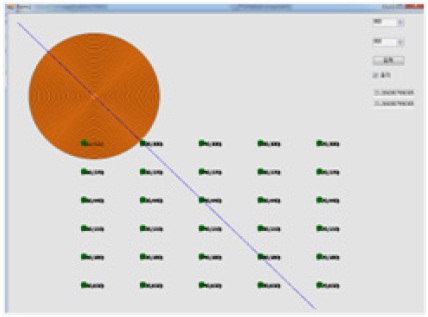
본 논문에서 제안하는 이동속도 예측 및 안전구역 확보 알고리즘의 효율성을 증명하기 위하여 시뮬레이션을 수행하였다. 모의 실험결과에서 보여주는 원형은 화재의 영향력이 미치는 범위를 나타내고, 작은 점들은 각각의 노드들을 나타낸다. 처음 단계는 화재가 이동하여 화재의 범위에 있지 않던 노드가 화재 범위내로 들어오게 되는 시간을 측정한다. 그 다음 또 다른 노드가 범위내로 들어오는 시간차와 노드간의 거리를 이용하여 화재의 이동속도를 계산한다. 마지막으로 계산 한 값이 시뮬레이션 프로그램에서 나온 값과 같은지 비교한다.
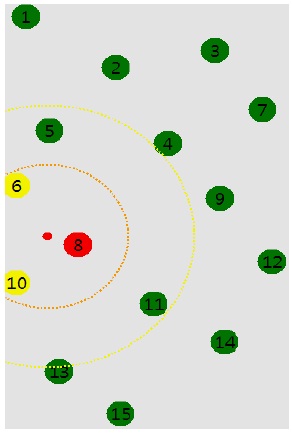
그림 9는 시뮬레이션상의 시간 t = 1 일 때의 프로그램 화면이다. 원형은 화재의 영향력이 미치는 범위를 나타낸 것이고, 점은 각 각 좌표에 위치하는 노드들을 나타낸 것이다. 화재는 그림 9 에 보이는 직선을 따라 움직이게 설정을 했다. t = 1일 때 화재는 한 노드와 인접하게 된다. 이 때 t = 1의 시간을 저장한다.
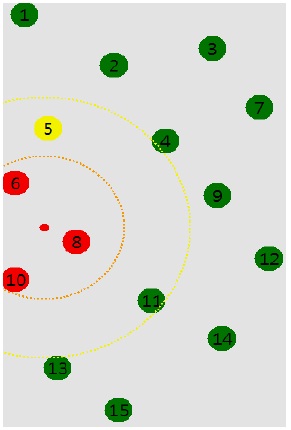
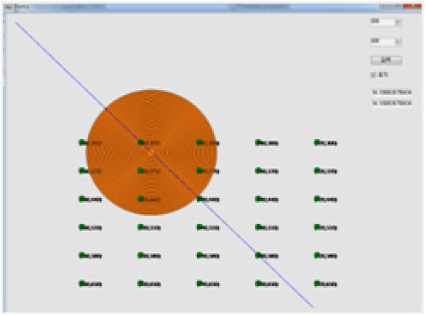
그림 10은 시뮬레이션상의 시간 t = 2 일 때의 프로그램 화면이다. t = 2 일 때의 화재는 또 다른 노드와 인접하게 된다. 프로그램 내에서 t = 1과 t = 2의 시간차는 40초였다. t = 1, t = 2에서 인접했던 노드는 각 각 (300, 300), (440, 440)에 위치한다. 노드간의 거리는 약 197.98로 계산된다. 시간차와 거리를 이용하여 4.9495d/sec의 결과가 나온다.
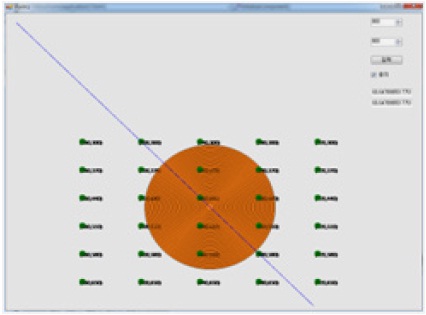
그림 11은 시뮬레이션 시간 t = 3일 때 좌표(580, 580)인 노드와 화재의 영향력이 인접하는 그림이다. 화재의 이동속도가 4.9495 d/sec일 때 t = 2에서의 화재가 t = 3에서 인접하는 노드(580, 580)까지 걸리는 시간은 40초가 계산된다. 시뮬레이션을 실행시켜 본 결과 40초로 계산된 결과와 같은 값이 나온다.
본 논문에서는 상황인지 센서를 활용한 화재 감지 알고리즘과 이를 통해 화재 상태를 3단계로 나누는 기법, 화재 감지 노드에서 수집된 상황정보와 신호를 보낸 노드의 좌표를 이용하여 화재의 이동경로 및 이동속도를 예측하는 알고리즘을 제안한다.
화재감지 알고리즘을 활용한다면 복합적인 상황에 국한하지 않고도 화재를 감지할 수 있고, 화재 상태를 3단계로 나눴을 경우 화재 상태에 따라 센싱 주기를 조절하여 데이터 부하 방지와 화재 위험지역에 대한 차별화 된 감지 시스템을 적용하여 집중적인 화재감지가 이루어질 것이라 기대한다. 또한 화재감지 알고리즘 시뮬레이션을 통해 요소별로 가중치를 다르게 주는 것이 화재감지의 정확성을 높일 수 있음을 증명하였다.
인명 및 재산의 피해를 최소화하고 신속한 화재 감지를 위해서는 IT 기술을 활용한 화재 감지 시스템 개발이 요구되는 상황이다[10].
현재까지는 화재 감지 알고리즘을 구현한 것이 전부이지만 추후에는 상황인지 센서를 활용하여 화재감지 뿐만 아닌 복합적인 자연재해를 검출할 수 있도록 할것이다. 이동속도 예측 및 안전구역 확보 알고리즘은 온도데이터만을 활용하였기 때문에 충분한 신뢰성이 보장되지는 않고 있다. 따라서 추후에는 다른 데이터를 추가로 적용하여 정확한 예측결과를 도출해 내는 것을 목표로 하고 있다.