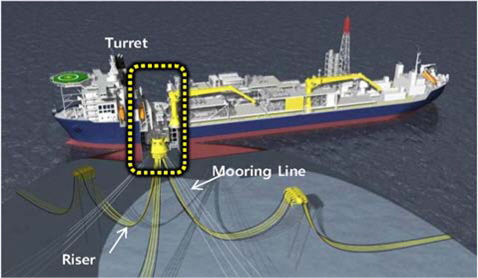
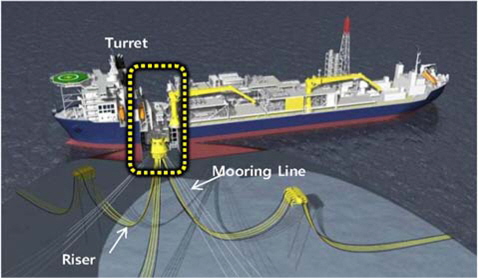
해양플랜트 중 FPSO(Floating, Production, Storage and Offloading)는 해상에서 안정적인 작업을 위해 다점 계류(spread mooring) 또는 회전 계류(turret mooring) 방식의 계류 시스템(mooring system)을 사용한다. 회전 계류는 선수 또는 Fig. 1과 같이 선체 내측에 터렛(turret)을 설치하고, 해저와 터렛을 앵커(anchor)로 연결하는 방식이다. 선박은 터렛을 중심으로 외력의 영향이 감소하는 방향으로 회전한다. 또한, 터렛에는 해저 유정에서 유체를 선박까지 이송하는 통로인 생산용 라이저(riser)가 설치된다.
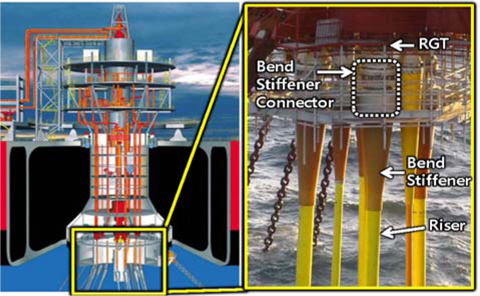
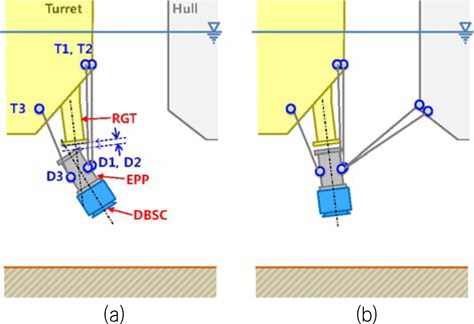
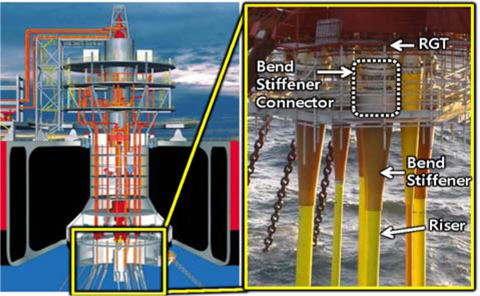
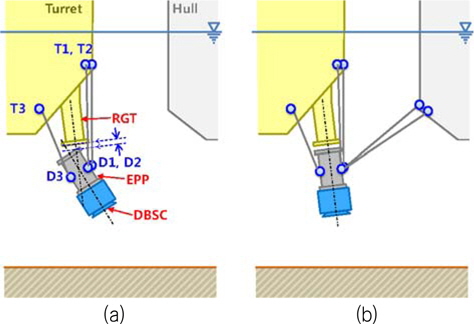
터렛의 구성요소 중 Fig. 2에 표기한 RGT(Riser Guide Tube)는 라이저를 연결하는 장비로 터렛 하부에 방사형으로 다수를 배치한다. 라이저 상부에 설치된 bend stiffener는 라이저와 RGT의 연결부위에서 라이저에 작용하는 휨 모멘트(bending moment)를 견디는 역할을 한다. Bend stiffener와 RGT 사이는 bend stiffener connector를 이용하여 연결한다.
Bend stiffener connector로 라이저와 RGT를 연결할 때 기존에는 다이버가 작업했으나, 최근에 다이버 없이 작업할 수 있는 DBSC(Diverless Bend Stiffener Connector)가 개발되었다.
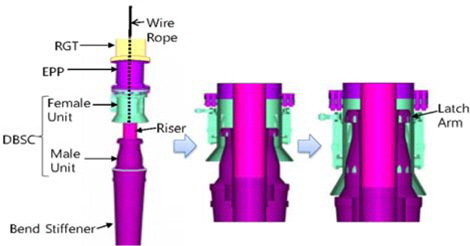
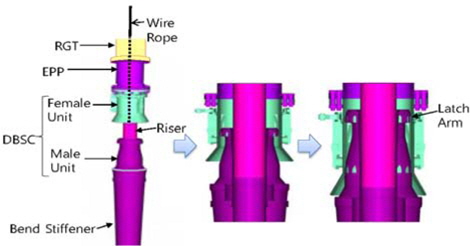
DBSC는 Fig. 3과 같이 RGT에 연결되는 female unit과 라이저에 연결되는 male unit으로 구성된다. 라이저 상단에 연결한 와이어 로프를 RGT 내부로 통과시킨 상태에서 감아 올리면 DBSC male unit이 female unit 안으로 들어가고, male unit의 latch arm을 female unit에 체결하는 방식으로 연결된다 (FES International, 2013). RGT의 길이 연장을 위해 RGT와 DBSC female unit 사이에 EPP(Extended Pup Piece)가 추가로 설치될 수 있다.
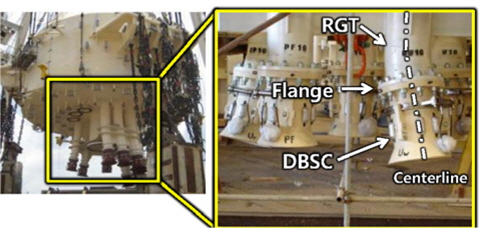
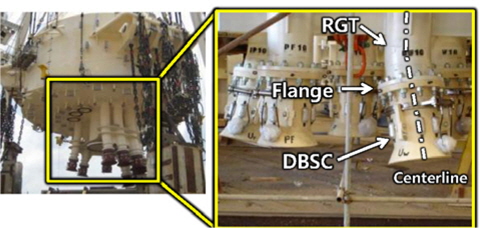
FPSO를 건조 시 DBSC female unit(이하 DBSC)은 플랜지에 볼트 체결 방식으로 RGT에 연결되는데, 여러 개의 RGT가 Fig. 4와 같이 각기 다른 방향으로 휘어 있어 RGT 하부면이 3차원 공간 상 비대칭으로 배치되어 있다. 따라서 DBSC를 RGT에 연결하기 위해서는 RGT 하부면의 위치 및 자세를 고려해 DBSC를 연결 위치로 리프팅해야 한다.
본 논문에서는 수중에서 DBSC를 RGT에 연결하는 경우를 대상으로 하였다. 터렛 하부, 선체 및 DBSC에 러그를 배치해 와이어 로프로 DBSC를 연결 위치에 리프팅 하는 데 필요한 러그 위치를 수학적으로 결정하고, 시뮬레이션을 통해 리프팅 가능성을 확인하였다.
본 논문의 2장에서는 특정 자세로 물체를 리프팅하는 문제에 대한 관련 연구를 살펴본다. 3장에서는 RGT의 비대칭 배치를 고려한 러그 위치 결정 내용에 대해 설명한다. 4장에서는 결정한 러그 위치를 리프팅 시뮬레이션 프로그램에 입력해 DBSC 연결 가능성을 확인한다. 마지막으로 5장에서는 결론 및 향후 연구 계획을 기술한다.
Choi and Sin (2003)는 해상 크레인 4기로 침몰 선체를 리프팅하는 문제에서, 크레인의 인양력을 구하기 위해 침몰 선체의 자세를 고려하였다. 지배 방정식은 선체의 3차원 정역학적 평형 방정식으로 하고, 미지수를 크레인의 인양력으로 하는 부정 연립 방정식을 구성하였다. 부정 연립방정식의 해를 구하기 위해 크레인 로프의 신장(elongation) 및 침몰 선체에 부착된 러그의 기하학적 위치를 고려한 제약 조건을 추가해 부정정 문제를 정정 문제로 바꾼 후, 연립방정식을 구성해 인양력을 계산하였다.
Tin-Loi and Lee (2004)는 빔 구조물을 크레인으로 리프팅하는 문제에서, 기울어진 빔의 자세에 대해 슬링 벨트(sling belt)의 최적 연결 위치를 구하였다. 지배 방정식은 빔 구조물의 2차원 정역학적 평형방정식 및 기하학적 형상을 고려한 관계식으로 하고, 미지수를 빔 구조물 길이방향에서의 슬링 벨트 연결 위치로 하여 부정 연립방정식을 구성하였다. 이 문제를 최적화 문제로 접근하여 부정 연립방정식을 제약조건으로, 목적함수를 빔 구조물에 가해지는 굽힘 모멘트(bending moment)로 설정하였으며, min-max optimization 방법을 사용해 최적 연결 위치를 계산하였다.
본 논문에서는 수중에서 DBSC를 RGT에 연결할 때 필요한 리프팅 러그 위치를 결정하기 위해, 지배 방정식으로 연결 위치에서 DBSC의 3차원 정역학적 평형방정식을 사용했다. 이 때 러그 위치는 선체에 부착 가능한 3차원상 임의의 위치여야 하므로, 미지수를 연결 위치로 정의한 Tin-Loi and Lee (2004)와 달리 DBSC에 작용하는 와이어 로프 장력 벡터로 설정하였다. 부정 연립방정식의 해는 Choi and Sin (2003)과 같이 제약 조건을 추가하지 않고, Tin-Loi and Lee (2004)와 같이 최적화 문제로 접근하였다. 부정 연립방정식을 제약조건으로, 목적함수를 와이어 로프 장력 성분 제곱의 합으로 설정하였으며, 라그랑주 승수법(lagrange multiplier method)을 사용해 해를 계산했다. 계산한 와이어 로프 장력 벡터 방향의 연장선과 선체가 만나는 지점으로 러그 위치를 결정하였다. 결정한 러그 위치를 이용하여 선행 연구에서 개발한 동역학 기반 공법 해석 프로그램인 SIMSON(SIMulation System Of New production planning) (Cha, et al., 2007; Hwang, et al., 2009; Park, et al., 2011)으로 시뮬레이션 하였으며, 결과 분석을 통해 러그 위치의 검증 및 RGT와 DBSC의 연결 가능성을 확인하였다.
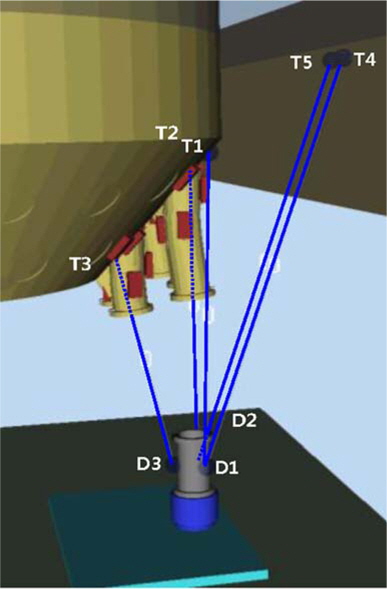
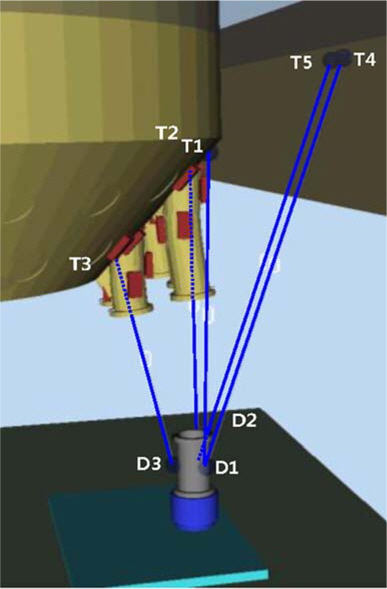
본 설치 작업에는 RGT의 길이 연장을 위해 RGT와 DBSC 사이에 EPP(Extended Pup Piece)가 추가로 고려된다. 따라서 DBSC와 EPP를 미리 조립한 후 함께 리프팅 한다. 초기 러그는 Fig. 5(a)와 같이 터렛 하부에 3개(T1, T2, T3), EPP에 3개(D1, D2, D3) 배치되어 있다. 이러한 초기 배치에서 총 3개의 와이어 로프로 리프팅 할 경우, DBSC와 EPP의 조립품이 연결 지점에서 기울어져 연결을 위한 자세를 만족하지 못해 추가적인 힘과 모멘트가 필요하다. 따라서 본 논문에서는 초기 배치된 러그를 사용하면서 선체에 러그를 추가하여 리프팅하는 방법을 검토하였다. 선체에 추가하는 러그 개수는 실제 공법 실행 시의 유연성을 고려해 Fig. 5(b)와 같이 선체에 두 개의 러그 T4, T5를 추가하는 방법을 검토하였다. 총 5개의 와이어 로프로 리프팅하여 연결을 위한 위치 및 자세조건을 만족하게 하려고 한다.
본 문제를 정의 시 다음의 가정 및 조건을 사용하였다
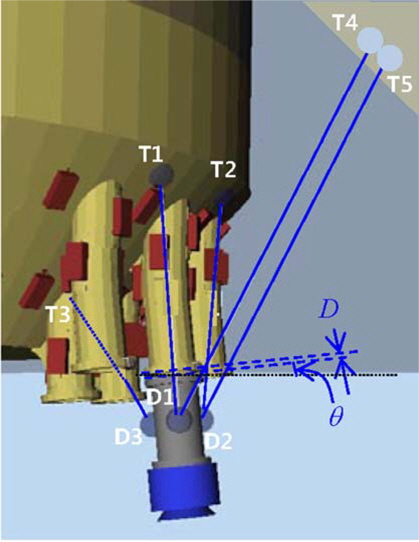
- FPSO 선체 운동은 고려하지 않음 - 수중에서 DBSC와 EPP 조립품에 작용하는 힘은 중력과 부력만 고려 - 연결 위치에서 RGT 하부면과 EPP 상부면의 연결 가능 여부는 0.1 m 거리에서 두 면이 평행한 것으로 판단 - 터렛 하부 및 EPP에 부착되어 있는 러그는 초기 위치에서 고정 - 연결을 위한 위치 및 자세에서 DBSC와 EPP 조립품은 정적으로 평형을 유지해야 함
와이어 로프 5개를 사용한 연결 과정은 다음과 같다.
- DBSC와 EPP의 조립품을 해저면에 배치 - 터렛 하부의 러그 3개(T1, T2, T3)와 EPP의 러그 3개(D1, D2, D3)를 와이어 로프로 연결 - 터렛 인근 선체에 러그를 2개(T4, T5) 추가 후 EPP에 설치된 러그 3개 중 2개(D1, D2)와 와이어 로프로 연결 - DBSC와 EPP의 조립품을 총 5개의 와이어 로프로 리프팅하여 RGT 하부면과 EPP 상부면이 연결 가능한 위치가 되도록 조절 - RGT 하부면과 EPP 상부면의 플랜지를 볼트로 연결
위 조건에서 선체에 새로 설치하는 러그 2개(T4, T5)의 위치를 결정한다.
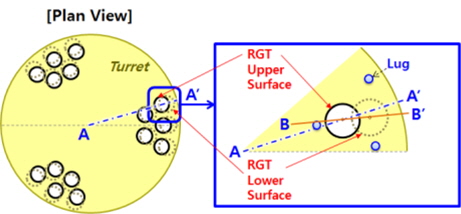
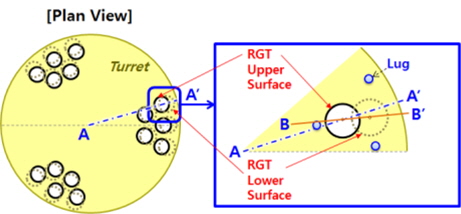
RGT는 터렛 하부에서 볼 때 방사형으로 다수가 배치되어 있으며, RGT 하부면의 위치와 자세, 터렛 하부에 부착되어 있는 러그 위치가 서로 상이하다. 예를 들어 Fig. 6에서 터렛의 중심과 RGT 상부면 중심의 연결선 AA', RGT 상부면 중심과 하부면 중심의 연결선 BB'가 평행하지 않다. 즉, RGT의 하부면이 AA'에 비대칭이다. 또한 러그 배치 역시 AA'나 BB'에 대칭으로 배치되어 있지 않다.
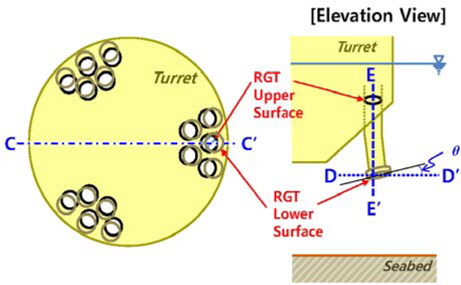
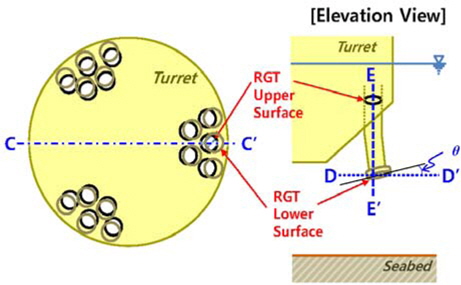
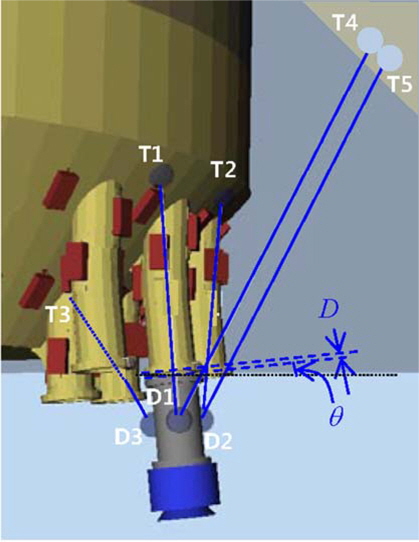
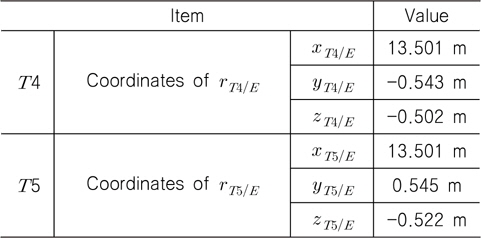
Fig. 6에서 RGT는 총 15개이며 5개씩 3그룹으로 배치된다. 이 때 5개는 서로 배치가 다르며, 본 논문에서는 그 중 Fig. 7에서 화살표로 표시한 RGT에 대해 DBSC와 EPP 조립품의 설치 가능성을 검토한다. 검토 대상 RGT의 상부면 및 하부면 중심은 평면도에서 선 CC' 상에 위치하며, 하부면은 정면도에서 수평선 DD'을 기준으로 기울어져 있다(약 10도 이내). 즉, RGT 하부면은 RGT의 상부면 중심상의 선 EE'에 비대칭이다. 그러므로 DBSC와 EPP 조립품을 리프팅 할 때는 RGT 하부면의 위치와 자세를 고려해야 한다.
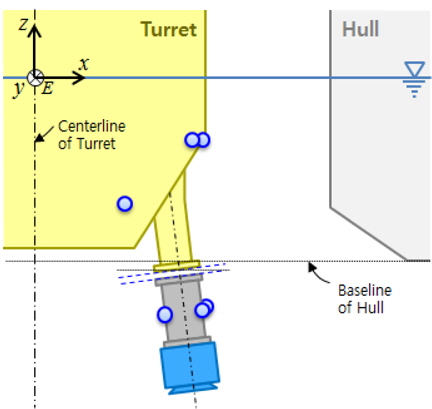
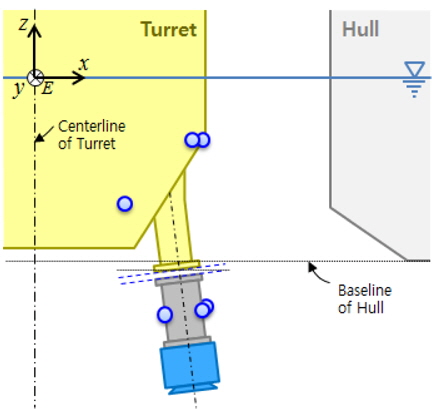
DBSC와 EPP 조립품의 위치 및 자세, 러그 위치 등을 기술하기 위한 좌표계로 Fig. 8과 같이 관성 좌표계(inertial reference frame, E-xyz frame)를 터렛 중심선과 수면의 교점 E에 위치하는 것으로 설정하였다.
와이어 로프로 DBSC와 EPP 조립품을 연결 위치에 리프팅하기 위해 선체에 새로 설치하는 러그 2개의 최적 위치는 기하학적으로 선체에 부착 가능한 위치여야 한다. 러그 위치를 미지수로 가정하면 이 조건을 고려해 방정식을 구성하기 복잡하다. 따라서 와이어 로프 장력 벡터를 구하고, 결과로 구한 방향 벡터의 연장선과 선체가 만나는 지점을 계산해 러그 위치를 구한다.
연결 위치에서 DBSC와 EPP 조립품의 정적 평형을 만족하기 위한 정역학적 평형방정식을 적용한다. DBSC와 EPP 조립품에 작용하는 중력, 부력, 5개 와이어 로프의 장력을 고려하여 힘과 무게중심 G를 기준으로 한 모멘트의 정역학적 평형방정식을 정리하면 식 (1), (2)와 같다.


여기서


여기서
Fi는

r

r


식 (1), (2)에서 미지수는 5개 와이어 로프 장력 벡터의 세 성분이므로 총 15개다. 그런데 와이어 로프 장력 벡터 중 러그
1, 2, 3번째 와이어 로프 장력 벡터를 방향 및 크기로 정리하면 식 (9)와 같다.

여기서

식 (8), (9)를 식 (1), (2)에 대입하면 식 (11)과 (12)를 얻는다.

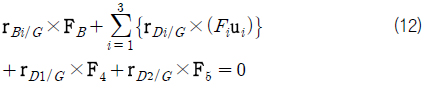
식 (11), (12)에서 중력과 부력에 의한 힘과 모멘트를 이항해 정리하면 식 (13), (14)와 같다.

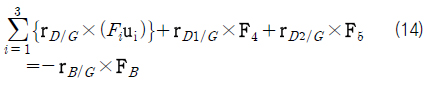
식 (13), (14)을 미지수

여기서,



I(3X3)은 단위행렬(identity matrix)이다.
[r


식 (15)에 사용되는 각 성분의 값을 Table 1에 정리하였다. 이 때, 공간상의 점의 위치를 기술하기 위해
[Table 1] Coordinates of the lugs on the turret, G, B, and lugs on the EPP
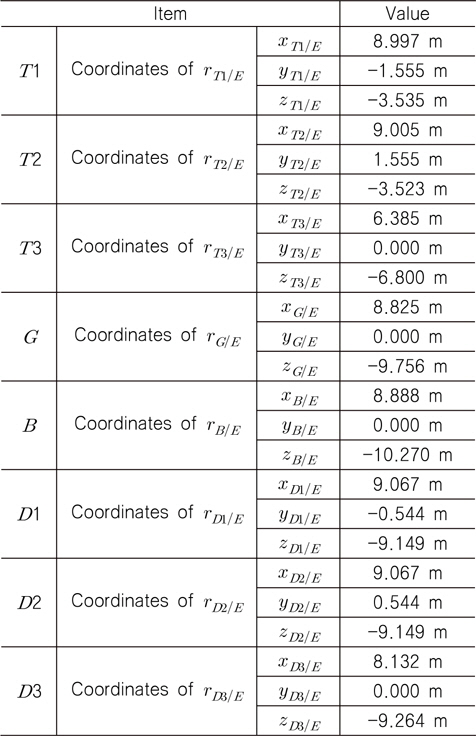
Coordinates of the lugs on the turret, G, B, and lugs on the EPP
여기서 DBSC와 EPP 조립품의 질량 m은 6.358 ton, 부피▽는 1.890 m3이다.
식 (15)는 미지수 9개, 방정식 6개인 부정 연립방정식(undetermined equation)이다. 동일한 정식화 방법을 선체에 한 개의 러그를 추가하여 4개의 와이어 로프를 사용하는 경우에 적용하면 미지수 6개, 방정식 6개인 연립방정식을 구성하며 단일해를 갖는다. 그러나 이 경우 유연한 공법 수행이 어려울 가능성을 고려해 총 5개 와이어 로프를 사용하여 부정 연립방정식을 구성하였다. 그런데 부정 연립방정식의 해는 무수히 많으므로 방정식의 해를 구하기 위해 리프팅에 적합한 조건을 목적함수로 하는 최적화 문제로 접근하였다. 와이어 로프를 연결하는 윈치(winch)가 견딜 수 있는 장력 값의 최대 한계가 있으므로 목적함수를 미지수 각 성분 제곱의 합인
식 (15)를 최적화 문제로 정리하면 다음과 같다.
- 목적함수: xTx - 제약조건: Ax= y
최적화 문제의 해를 구하기 위해, 라그랑주 승수법(lagrange multiplier method)을 사용해 라그랑주 함수(lagrangian)



여기서 λ는 라그랑주 승수(lagrange multiplier)다. 목적함수

여기서 부정 연립방정식의 목적함수를 xTx로 설정해 구한 해 x를 least-norm solution이라고 한다 (Boyd, 2007).
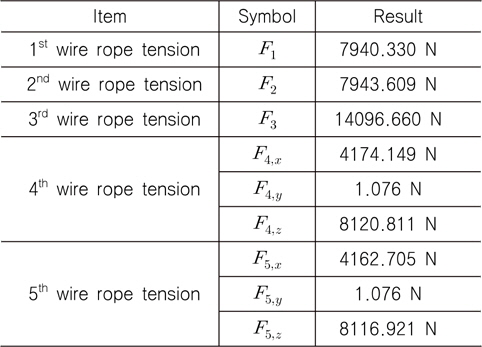
Table 1의 값을 식 (24)에 대입해 계산한 결과는 Table 2와 같다
[Table 2] Wire rope tension calculated by optimization
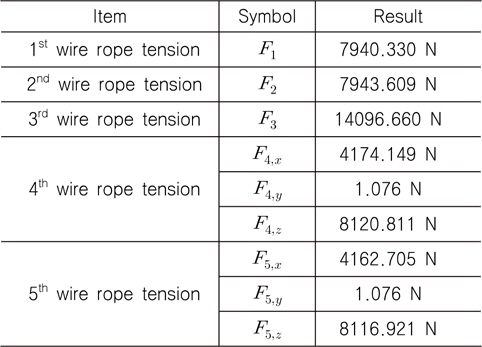
Wire rope tension calculated by optimization
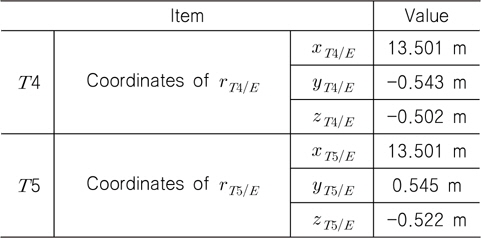
계산 결과, 와이어 로프 장력 크기는 윈치가 견딜 수 있는 작업 기준 최대치(5 ton, 약 49,050 N)를 넘지 않는 것을 확인할 수 있다. 위 결과를 이용해 선체에 새로 설치하는 러그 2개의 부착 위치를 선체의 측면과 와이어 로프 장력 벡터
[Table 3] Coordinates of the lug T4, T5 under the hull
Coordinates of the lug T4, T5 under the hull
계산한 러그 위치 및 연결 자세에서의 와이어 로프 장력을 동역학 기반 공법 해석 프로그램(SIMSON)에 입력해 리프팅 시뮬레이션을 수행하였다
새로 추가된 러그와 와이어 로프가 배치된 모습은 Fig. 9와 같다.
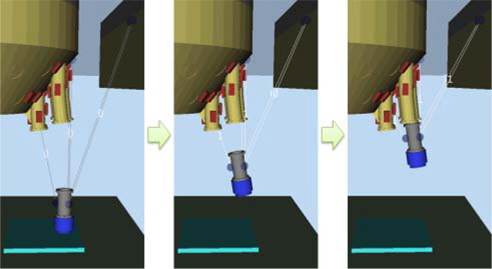
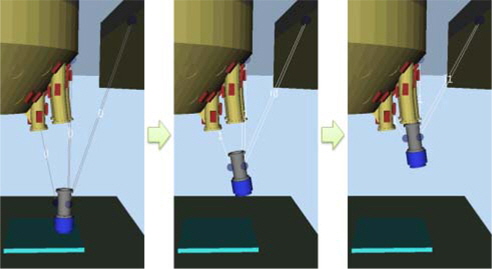
초기 위치를 해저로 하고, 결합 위치에서의 와이어 로프 장력 및 와이어 로프 길이를 고려해 와이어 로프를 감아 올려 Fig. 10와 같이 리프팅 시뮬레이션을 수행하였다.
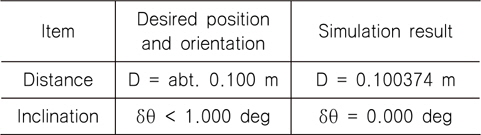
DBSC와 EPP 조립품이 연결 목표 위치 근방에 도달하였을 때 와이어 로프를 천천히 조절하면서 Table 2에 계산한 장력이 작용하도록 리프팅 시뮬레이션을 수행하였다. 그 결과 Table 4, Fig.11과 같이 DBSC와 EPP 조립품의 위치 및 자세가 연결 목표 위치 및 자세를 만족함을 확인하였다. 오차의 원인은 시뮬레이션시 조립품에 작용한 미소한 가속도의 영향으로 추정된다.
[Table 4] Summary of the lifting simulation
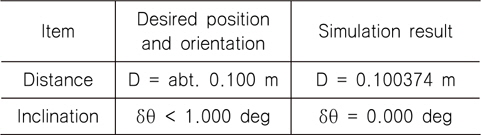
Summary of the lifting simulation
본 논문에서는 FPSO 건조 시 DBSC와 EPP를 조립 후 수중에서 RGT에 연결하는 경우를 대상으로, 3차원 공간 상에 비대칭으로 배치된 RGT 하부면을 고려해 DBSC와 EPP 조립품을 연결 위치에 리프팅하기 위한 최적 러그 위치를 계산하였다.
러그 위치를 산정하기 위해 와이어 로프 장력 벡터를 최적화 문제로 계산한 후 와이어 로프 장력 벡터 방향을 선체에 투영해 추가할 러그 위치를 구하였다. 계산 결과를 동역학 기반 공법 해석 프로그램(SIMSON)으로 리프팅 시뮬레이션을 하여 DBSC와 EPP 조립품의 위치 및 자세가 연결 목표 위치 및 자세에 도달하는 것을 확인하였다.
본 논문에서 제시된 방법은 검토되는 여러 공법 중 일부이다. 이와 같이 러그 위치 산정 및 리프팅 해석을 실제 공법 적용 전에 수행하면 예상되는 위험 요소를 조기에 발견하여 보다 효율적인 공법을 찾는 것이 가능할 것으로 기대된다.