바다는 무한한 광물, 에너지, 공간 등의 자원을 보유하고 있지만 인간은 그것의 극히 일부분만을 활용하고 있으며 대부분은 오랜 세월동안 사용하지 못하고 있다. 해양은 인간이 접근하기에는 위험한 극한의 요소가 많기 때문에 직접적인 해양 탐사를 위해서는 무인 수중운동체의 운용이 필수적이다.
대표적인 해양탐사 시스템으로 무인잠수정(Autonomous underwater vehicle)이 잘 알려져 있다(Nakamura and Savant, 1992). 무인 잠수정은 운용자의 개입이 최소화되어 스스로 자율운항이 가능하여 군사적, 학술적 연구에 사용되는 제어시스템이다. 무인잠수정은 해양환경의 다양한 정보를 수집하거나 감시, 정찰활동 등의 중요한 임무를 수행하며 특히 사람이 접근하기 어려운 심해 탐사에 활용이 가능하다는 장점이 있다. 하지만 프로펠러를 사용하여 추진력을 생성하므로 선체의 무게가 무겁고 부피가 크다. 또한 추진동력을 생성하기 위한 에너지의 저장량이 한정되어 있으므로 장시간 탐사에 불리하다는 단점이 있다.
한편 수중글라이더는 바다의 심층과 표층을 오가면서 원하는 지점으로 이동할 수 있도록 고안된 무인 해양탐사 로봇으로서 역할은 무인잠수정과 크게 다르지 않지만 프로펠러 추진방식을 사용하는 무인잠수정과는 달리 별도의 추진체를 사용하지 않기때문에 에너지 측면에 있어서 무인잠수정보다 효율적이다(Park, 2013). 수중글라이더의 추진력은 유체의 유입과 배출에 의한 부력 조절과 내부의 질량 이동과 날개의 움직임을 이용한 모멘트 변화에 의해 발생된다. 따라서 동력 에너지의 사용이 비교적 적기 때문에 장시간, 장거리의 해양 탐사에 적합하다(Park, 2013; Park et al., 2012).
최근 수중글라이더의 동역학 해석 및 제어기 설계에 관한 연구가 크게 주목받기 시작했다. 그 중에서 특이섭동(Singular perturbation) 기법은 수중글라이더 동역학 해석에 효과적인 방법 중 하나로 알려져있다. 특이섭동 기법은 하나의 시스템을 응답이 느린 동역학과 빠른 동역학으로 분리하여 해석하는 방법으로 장주기와 단주기 모델로 나누어지는 수중글라이더의 동역학에 적합하다. 하지만 장주기의 축소모델(Reduced model)과 단주기의 경계층모델(Boundary-layer model)은 근사화된 비선형 모델로써 이를 기반으로 설계된 제어기는 수중글라이더를 국소적으로(Locally) 안정화할 수 있지만 전역적으로(Globally) 안정화하지는 못한다(Bhatta and Leonard, 2004; Bhatta and Leonard, 2008; Zhang et al., 2012).
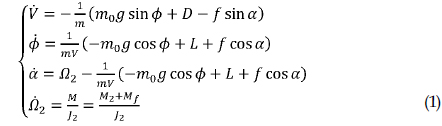
논문 (Bhatta and Leonard, 2002)에서는 내부 질량이동에 의한 수중글라이더의 안정화 문제를 다루며 제어기 설계를 위해 피드백 선형화(Feedback linearization) 기법을 사용한다. 여기서, 선형화된 시스템은 상대차수(Relative degree)가 시스템의 차수보다 낮은 내부동역학으로 표현되며 전체 동역학은 등가의 삼각시스템(Triangular system)으로 표현된다. 이것은 다시 비선형의 영점동역학(Zero dynamics)과 부분적으로 선형화된 시스템(Partially linearized system)으로 분리되어 해석된다. 이 방법을 이용하여 분리된 각각의 시스템을 안정화하는 제어기를 설계할 수는 있지만 근사화 오차가 존재하기 때문에 전역 안정도를 보장하지 못한다.
본 논문은 비선형 수중글라이더의 안정화 문제를 다룬다. 수중글라이더의 제어입력으로서 유체의 유입과 배출에 의해 조절되는 부력과 승강타(Elevator)의 움직임에 의해 발생하는 모멘트를 고려한다. 상태변수들의 복잡한 비선형성과 모멘트 제어입력에 의한 추가적인 상호연결(Coupling) 힘은 제어기 설계를 어렵게 만든다. 수중글라이더의 제어기를 설계하기 위해 피드백 선형화 기법을 사용하여 등가의 선형시스템 제어기 설계문제로 변환한다. 차의 시스템 동역학을 부분적으로 선형화하여 차의 선형시스템으로 변환한 후 모멘트 제어기를 설계한다. 이어 모멘트 제어기를 포함한 나머지 차 시스템에 대한 추가적인 피드백 선형화를 수행하여 부력 제어기를 설계한다. 변환된 각 부분 선형시스템의 제어기 설계조건은 선형행렬부등식의 형태로 제시되며 설계된 선형 제어기로부터 비선형 수중글라이더의 제어입력을 만든다. 이 방법은 기존의 연구와는 달리 근사모델을 사용하지 않기 때문에 폐루프 시스템의 전역적 안정성을 보장한다.
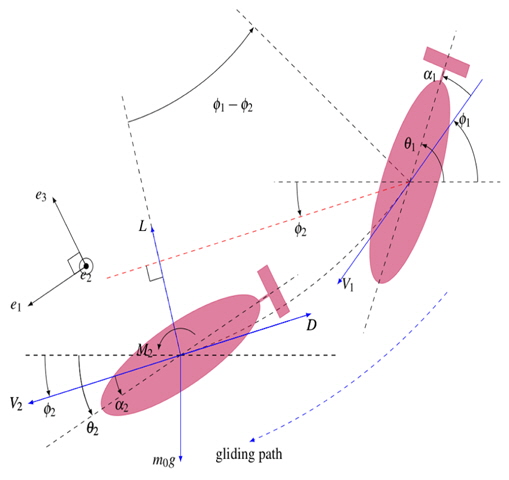
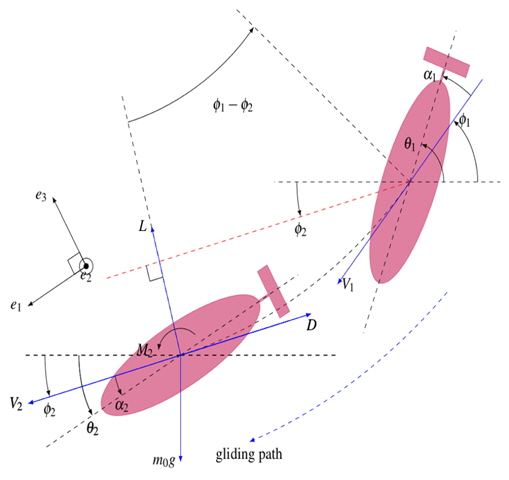
Fig. 1은 짧은 구간에서 이동하는 수중글라이더의 모형을 도식화하여 나타낸 것이다. 여기서, 아래첨자 ‘1’과 ‘2’는 이동하는 수중글라이더의 순간 위치를 구분하기 위해 쓰인다. 수중글라이더의 모델링을 위해 다음과 같은 가정을 도입한다.
가정 1: 수중글라이더는 타원형의 강체이며 차원의 수직 평면에서 운항함을 가정한다.
가정 2: 수중글라이더는 그림 1과 같이 중심각이 ∅1―∅2인호(Arc)의 궤적을 따라 움직임을 가정한다
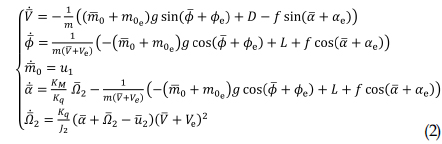
수중글라이더의 동역학 모델링을 위해 동체기준의 좌표계를 사용한다. 벡터들
가정 3(Bhatta and Leonard, 2008; Zhang et al., 2012): 매우 짧은 구간 내에서 ∅1 ≈∅2 ≈∅,
가정 3에 의해 동체 기준축(Body axis)
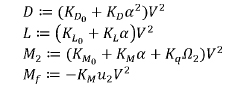
여기서,
가정 4: 부력 조절에의한 수중글라이더의 내부 질량 이동과 모멘트는 발생하지 않음을 가정한다.
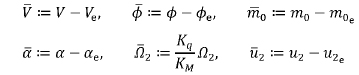
다음의 변수들을 정의하자.
여기서,
다음의 새로운 상태변수들과 제어입력을 고려하자.
여기서,
이며 아래첨자 ′
정의 1: 벡터공간

또한 고차의 방향성미분을 다음과 같이 정의한다.

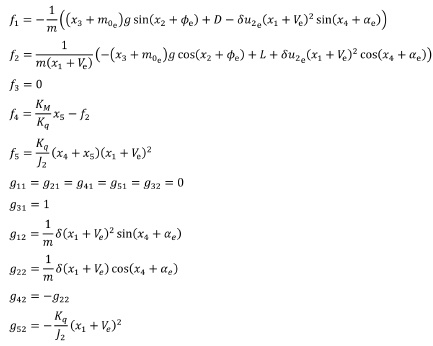
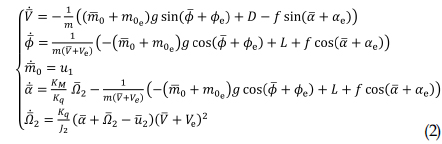
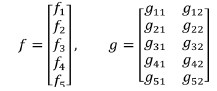
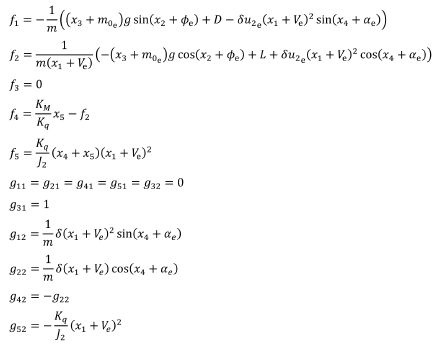
상태변수 와 제어입력 를 정의하면 수중글라이더 동역학 (2)는 다음과 같은 형태로 표현된다.

여기서,
이며
이다. 다음의 표준행렬
을 가지는 선형 변환

여기서,
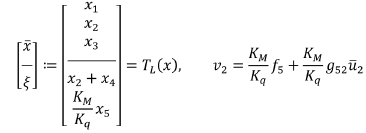

이며 비선형 수중글라이더 모델 (3)과 등가이다. (4)에서 ζ-동역학의 입력


여기서,
이제 -동역학을 점근적으로 안정화하는
여기서,

이다. 부력 제어입력

을 정의하면 변환된 상태변수

여기서,
이며 식 (4)의 ζ-동역학과 등가이다. 이제 폐루프 시스템 (8)과 (6)으로 부터 확장된 시스템을 다음과 같이 쓸 수 있다.

여기서,

이며 (3)과 등가이다. 따라서 선형시스템 (9)가 점근적으로 안정하다면 시스템 (3)을 점근적으로 안정화하는 제어입력을 계산할 수 있다. 비선형 시스템 (3)의 제어입력

선형시스템 (9)의 제어이득행렬
는 다음 정리로부터 구할 수 있다.
정리1 : 다음 선형행렬부등식

을 만족하는 양한정 행렬
과 비정방행렬
이 존재한다면 선형시스템 (9)는 점근적으로 안정하다. 여기서,
증명: 양한정 행렬
에 대하여 양한정 함수

여기서,
참고1 : 피드백 선형화를 위한 상태변수들의 선형 변환
참고 2: 정리 의 선형행렬부등식 (11)의 해공간은 컨벡스 집합(Convex set)의 형태를 가진다. 식 (11)의 최적 해를 구하기 위해 본 논문에서는 MATLAB robust control tool box의 LMI solver를 사용하였다.
다음 모델 파라미터를 갖는 (2) 형태의 시스템을 고려하자 (Bhatta and Leonard, 2008).
정리 1을 만족하는 다음의 행렬들


로부터 , 를 계산하면 다음을 얻는다.
이제 제어이득행렬
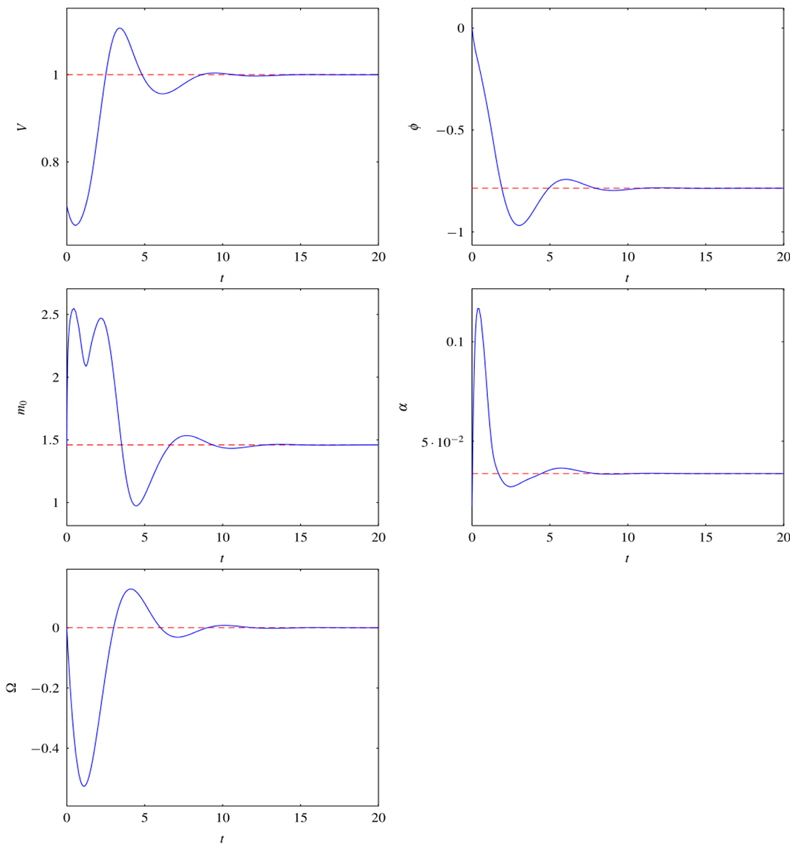
Fig. 2는 수중글라이더의 속도
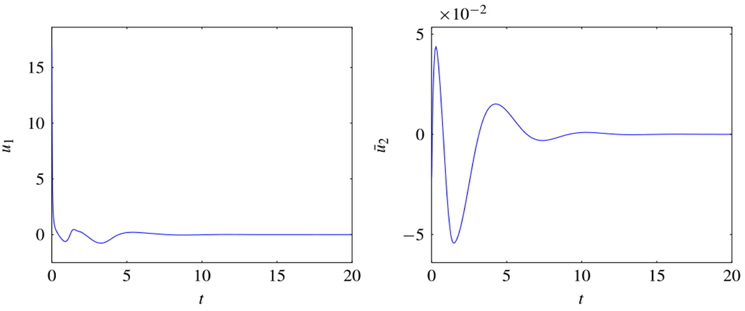
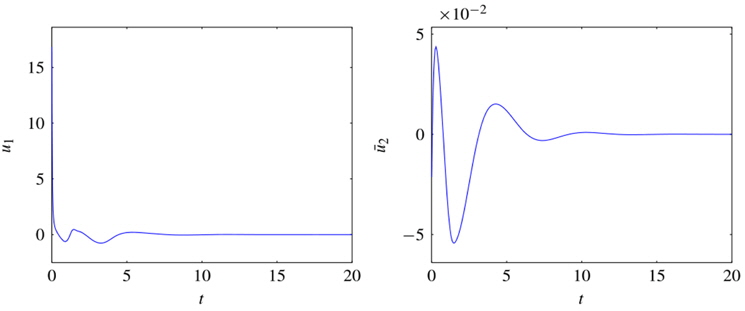
Fig. 3은 제어입력의 시간 응답이다. 상태변수들이 평형점에 도달한 후의 부력제어입력
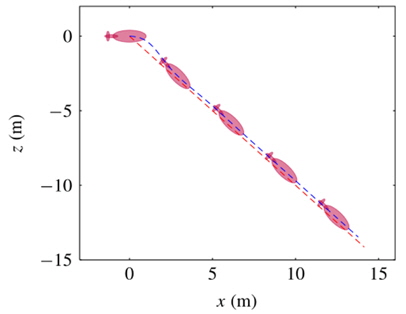
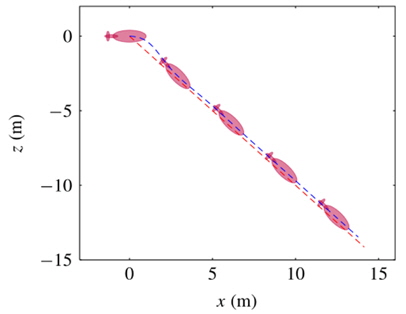
Fig. 4는 수중글라이더의 이동궤적을 보여준다. 여기서, 빨간괘선은 평형점 상태에서 수중글라이더의 기준경로, 파란 괘선은 실제 이동경로이다. 받음각을 나타내기 위해 수중글라이더의 모형을 타원 형태로 나타내며 수중글라이더의 방향을 표시하기 위해 꼬리 부분을 십자(Cross)로 표시한다. 그림에서 알수 있듯이 제안한 기법을 적용한 수중글라이더는 기준 경로에 빠르게 수렴하여 안정한 움직임을 보이고 있다.
본 논문은 부력과 모멘트 제어에 의한 수중글라이더의 안정화 문제를 논하였다. 안정한 시스템을 설계하기 위해 5차의 시스템을 부분 선형화하여 2차의 선형시스템으로 모델링 한 후 모멘트 제어기를 설계하였다. 이어 모멘트 제어기를 포함한 나머지 2차 시스템에 대한 선형화를 수행하여 부력 제어입력을 만들어냈다. 각 선형시스템의 제어 이득행렬은 선형행렬부등식의 설계조건으로부터 구하였으며 이로부터 수중글라이더의 제어입력을 만들어냈다. 모의실험을 통해 제안한 피드백 선형화 기법의 효용성을 입증하였다.



















![Time responses of glider variables V[m/5], ?[rad], m0[kg], α[rad], Ω[rad/s] (solid blue) and their equilibrium points (dashed red)](http://oak.go.kr/repository/journal/15607/HOGHC7_2014_v28n6_546_f002.jpg)