Time series of the dynamic response of a slender marine structure was predicted using quadratic Volterra series. The wave-structure interaction system was identified using the NARX(Nonlinear Autoregressive with Exogenous Input) technique, and the network parameters were determined through the supervised training with the prepared datasets. The dataset used for the network training was obtained by carrying out the nonlinear finite element analysis on the freely standing riser under random ocean waves of white noise. The nonlinearities involved in the analysis were both large deformation of the structure under consideration and the quadratic term of relative velocity between the water particle and structure in Morison formula. The linear and quadratic frequency response functions of the given system were extracted using the multi-tone harmonic probing method and the time series of response of the structure was predicted using the quadratic Volterra series. In order to check the applicability of the method, the response of structure under the realistic ocean wave environment with given significant wave height and modal period was predicted and compared with the nonlinear time domain simulation results. It turned out that the predicted time series of the response of structure with quadratic Volterra series successfully captures the slowly varying response with reasonably good accuracy. It is expected that the method can be used in predicting the response of the slender offshore structure exposed to the Morison type load without relying on the computationally expensive time domain analysis, especially for the screening purpose.
에너지 수요의 지속적인 증가에 따라 해저 유전 개발은 지속적으로 심해로 진행해 나가고 있는 추세이며, 이에 따라 라이저와 계류라인에 연결된 부유식 구조물의 적용이 점차 확대되고 있다. 부유체의 위치제어와 원유의 이송을 위해 설치되는 세장형 구조인 계류라인과 라이저는 해상의 불규칙파에 지속적으로 노출되므로 구조물의 안전성 확보를 위해 설계 단계에서 세심한 검토가 요구된다. 이러한 세장형 구조물은 그 구조적 거동 및 작용하중의 특성상 다양한 형태의 비선형적 요소가 존재함으로 인해 설계자들은 수치해석상 큰 비용을 요구하는 시간영역 해석에 의존할 수 밖에 없는 실정이다. 세장형 해양구조물의 동적 응답을 지배하는 해양 환경하중은 다양한 형태로 존재하나 그 중 중요한 부분을 차지하고 있는 것이 파랑하중에 기인한 파랑 관성력 및 파랑 저항력이다. 이 두 종류의 힘은 일반적으로 Morison의 식에 의해 결정되는데, 전자의 경우 유체입자의 가속도에 비례하는 성분으로, 후자의 경우 유체입자와 구조물의 상대속도의 제곱에 비례하는 성분으로 주어진다. 파랑 저항력의 속도 제곱항은 합 주파수 및 차 주파수 성분의 추가적인 2차항 성분의 힘을 유발하게 되는데, 일반적으로 차 주파수 성분의 저주파 2차항 성분의 힘이 고유주파수가 매우 낮은 세장형 구조물의 대변형 응답을 야기하는 것으로 알려져 있다 (Hong, 1999; Kim, et al., 2002; Lee, et al., 2012; Hong & Koterayama, 2004).
파랑하중에 노출된 세장형 구조물의 응답을 얻기 위해서는, 일반적으로 시간영역 비선형 유한요소 해석을 이용하는 것이 보통이다. 파랑하중의 불규칙성으로 인해 특정해역의 해상상태는 매우 많은 수의 단기해상상태의 확률분포로 표현되는 파랑 산포도 (wave scatter diagram)로 표현되는 것이 일반적인데, 설계 하중의 장기응답예측 혹은 피로수명의 예측을 위해서는 매우 많은 수의 단기해상상태에 대한 비선형 해석을 모두 수행하여야 하는 부담이 발생한다.
라이저 및 계류계 동적응답의 비선형성으로 인해 필연적으로 수반되는 시간영역 해석의 부담을 덜기 위해 다양한 연구들이 수행되었다 (Vazquez-Hernandez, et al., 2011; Rodrigues, et al., 2007; Mazaheri, et al., 2004; Yasseri, et al., 2010). Hosseini Kordkheili, et al. (2011)은 대변형을 수반하는 라이저의 동적응답 해석을 위해 보다 효율적인 유한요소 정식화를 제안하였다. 그들은 라이저의 효율적인 대변형 응답해석을 위해 개정 라그랑지안(updated lagrangian) 정식화를 기반으로 하여 여타의 선형화 기법이 갖는 부정확성을 극복하기 위한 새로운 선형화 기법을 제안하였다. Low and Langley (2008)는 부유체와 연성된 계류라인 및 라이저의 응답 예측을 위해 파랑 주파수 영역의 응답은 주파수 영역에서, 저주파수 영역의 응답은 시간영역에서 수행하는 복합된 시간/주파수 영역 해석기법을 제안하였다. Low (2011)는 상기의 기법을 계류라인과 라이저의 피로수명 예측에 적용하였으며, 비선형 시간영역 해석의 결과와 비교적 잘 일치하는 결과를 얻었다. 비선형 시간영역 해석의 효율화를 위해 인공 신경망 기법을 적용하고자 하는 연구들도 다수 수행되었다. Pina, et al. (2013)은 계류라인 및 라이저에 발생하는 장력을 얻기 위해 인공 신경망 기법을 적용하였다. 그들은 부유체의 운동응답을 기진원으로 하는 계류라인 및 라이저의 거동을 NARX(Nonlinear Autoregressive with Exogenous Input) 기법을 통해 시스템 식별 해석을 수행하고 이를 이용하여 다양한 단기해상상태에서의 장력을 예측하였다. NARX 기법을 이용한 동적응답의 예측은 매우 유용한 방법이기는 하나 식별된 시스템을 통해 시간영역에서 직접 응답을 예측하는 방법은 방대한 양의 데이터와 비교적 큰 네크워크 구조를 가지지 않는 한 해의 발산 등으로 인해 예측의 신뢰성이 보장되지 않는 단점을 가지고 있다. 이러한 이유로 본 연구에서는 NARX 기법으로 식별된 시스템을 주파수 영역에서 분석하여 고차의 주파수 응답함수를 도출하고 이를 토대로 시계열을 예측하는 시도를 수행하였다.
NARX 및 TDNN(Time Delayed Neural Network) 기법과 조화 진단(harmonic probing) 기법을 조합하여 미지의 비선형 시스템을 식별하고 식별된 시스템의 주파수 응답함수를 도출하는 연구들이 다수 수행되었다. Wray and Green (1994)는 데이터 베이스를 통해 식별된 TDNN의 파라미터들을 통해 대상 시스템의 Volterra 커널을 유도하였다. Chance, et al. (1998)는 Volterra 커널과 TDNN 파라미터 간의 연계성을 NARX로 확장하였으며, 조화진단 기법을 적용하여 식별된 NARX의 파라미터를 통해 1차 및 2차의 주파수 응답함수를 도출하고 이를 2차 및 3차의 강성 항이 포함된 Duffing 방정식에 적용하여 도출된 주파수 응답함수를 검증하였다.
본 연구에서는 Chance, et al. (1998)에 의해 제안된 방법을 차 주파수 영역까지 확대하여 Morison 하중에 의해 기진되는 자유지지 라이저의 1차 및 2차 주파수 응답함수를 구하고 이를 통해 라이저의 동적 응답 시계열을 예측하는 시도를 하였다. NARX 모델의 파라미터를 결정하기 위해 가우시안 백색소음(gaussian white noise)의 특성을 가지는 파랑 하중에 대한 비선형 유한요소 해석을 수행하여 얻어진 데이터를 이용하여 시스템을 식별하였으며, 식별된 NARX 모델에 조화진단 기법을 적용하여 주파수 응답함수를 도출하였다. 얻어진 주파수 응답함수를 2차의 Volterra 모델에 적용한 후 임의의 단기해상상태에 노출되는 구조물의 동적 응답 시계열을 예측하고 이를 시간영역 비선형 유한요소해석의 결과와 비교 검토 하였다.
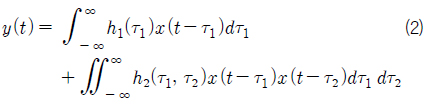
Volterra 급수는 임의의 동적 시스템의 약한 비선형(weakly nonlinear) 응답을 모델링하는 데에 널리 적용되는 기법이다. Volterra 급수의 기본 개념은 Taylor 급수와 유사하나 동적 시스템의 기억효과를 반영한다는 점에서 Taylor 급수와 차이를 지닌다. 약한 비선형 문제로의 제한은 무수히 많은 고차항을 고려하는 것이 불가능한 현실적인 이유 때문인데, 고차항 계산의 난이함으로 인해 일반적으로 최대 4차 혹은 5차 항까지만 고려된 약한 비선형 문제에 제한되어 적용된다. 외력

여기서,
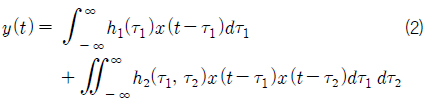
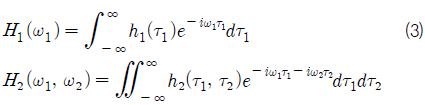
식 (2)의 첫번째 항은 일반적으로 잘 알려진 외력과 충격응답함수의 컨볼루션 적분이며, 두번째 항은 일반화된 충격응답함수와 외력의 연성 간의 고차 컨볼루션 적분이다. 충격응답함수는 시스템의 고유 특성을 나타내는 것으로 주파수 영역으로 변환하는 경우 시스템의 주파수 응답함수가 된다. 1차 및 2차 Volterra 커널의 퓨리에 변환은 식 (3)과 같이 각각 시스템의 LTF(Linear Transfer Function) 및 QTF(Quadratic Transfer Function)가 된다.
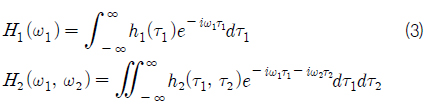
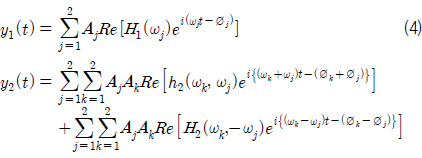
Volterra 커널 혹은 주파수 응답함수가 얻어지면 임의의 하중하에서 시스템의 응답은 Volterra 급수를 통해 손쉽게 얻을 수 있다. 2개의 조화 기진력이 외력으로 작용하는 경우 시스템의 1차 응답
여기서,
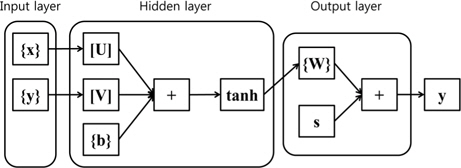
NARX 모델은 인공 신경망 기법의 일종으로 주어진 시스템의 입력 값과 출력 값을 이용해 비선형성을 갖는 임의의 시스템을 식별해 내는 비선형 시스템 식별 기법 중 하나이다. ‘AR’은 자기 회귀(autoregressive)를 의미하는 것으로 현재 시간에서의 시스템 출력 값은 과거의 시스템의 입력 값은 물론이며, 출력 값에도 의존하여 결정됨을 의미한다. NARX의 AR이 부재하는 경우 시스템의 출력 값이 단순히 과거의 시스템 입력 값에만 의존하는 TDNN 모델로 귀결된다. 일반적으로 노이즈가 포함된 실험데이터의 분석을 위해서는 이동 평균기법을 적용한 NARMAX(Nonlinear Autoregressive Moving Average with Exogenous Input) 기법이 널리 적용되는데 (Peng, et al., 2010), 본 연구에서 다루는 데이터들은 수치해석을 통해 얻어진 값들이므로 NARX 기법을 적용하였다. 식 (5)는 미지의 함수 f로 표현된 NARX 모델의 수학적 표현을 나타낸다.

여기서, 은 시간
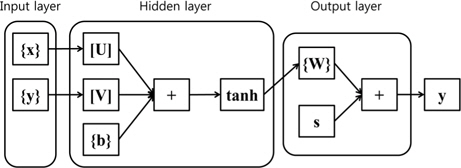
입력층은 시스템의 특정 과거 시간부터 현재까지의 입력 값 및 출력 값을 포함하고 있으며, 이를 은닉층으로 넘기는 역할을 수행한다. 은닉층으로 넘어온 입력 벡터들은 가중 파라미터로 구성된 행렬 [
식 (6)은 상기에 언급된 일련의 과정을 수학적으로 표현한 것이다.

여기서, {
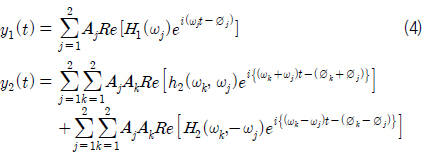
식 (6)은 주어진 시스템의 입력 값과 출력 값의 상관관계를 내연적으로 표현한 것으로 가중 파라미터 및 바이어스 파라미터 등과 같은 네트워크의 파라미터를 통해 표현된 시스템의 수학적 표현이다. 시스템 식별 작업은 기 준비된 입력 및 출력 값을 이용하여 네트워크 파라미터를 결정하는 과정으로 이해될 수 있으며 이는 실험 및 수치해석을 통해 준비된 입/출력 데이터를 기반으로 수행된다. 네트워크 파라미터들은 네트워크가 예측하는 시스템의 출력 값과 시스템의 진 출력 값 간의 평균제곱오차가 최소가 되도록 적응적으로 결정되는데, 인공 신경망 기법에서는 일반적으로 경사하강법(gradient descent method)을 적용하는 것이 보통이다. 식 (7)은 경사하강법을 통해 최소화 되어야 할 목적오차함수와 네트워크 파라미터의 이동 방향을 나타낸다. 목적오차함수의 두번째 항은 네트워크의 과적합(overfitting)을 방지하기 위해 도입된 정규화 항으로, 네트워크의 성능을 향상시켜주는 역할을 수행하는 것으로 알려져 있다 (Mackay, 1992).
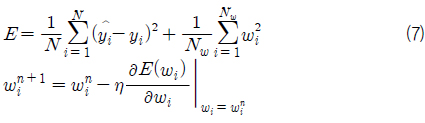
여기서, 은 갱신된 네트워크 파라미터이며, 은 이전 단계에서의 네트워크 파라미터를 나타낸다.
식 (6)에 보인 NARX 모델은 시간영역에서 직접적으로 시스템의 출력 값을 예측하는 데에 적용할 수 있으나, 시스템의 진 출력 값에 대한 초기치가 존재하여야 한다는 점과 시간영역에서의 오차의 누적으로 인한 출력 값의 발산 등의 문제를 극복하여야 하는 단점을 지니고 있다. 그와는 달리 주파수 영역 접근법은 시스템의 진 출력에 대한 초기치에 대한 정보가 필요 없으며, 식별된 시스템이 약간의 오차를 내포하고 있더라도 해의 발산으로 이어지지 않는다는 장점을 지니고 있다.
조화진단 기법은 Bedrosian and Rice (1971)에 의해 최초로 제안되었으며 후에 Billings and Tsang (1989)에 의해 이산화된 시계열로 확대 적용되었다. 주어진 시스템에 대한 미분 방정식이 도출되었거나 시스템 식별법을 통해 시스템의 특성이 수학적으로 표현된 경우 조화진단 기법을 통해 시스템의 주파수 응답함수를 구할 수 있다. 1차 주파수 응답함수를 얻기 위해서는 먼저 주어진 시스템에

식 (6)에 보인 NARX 모델은 쌍곡선 탄젠트 함수로 표현이 되어 있으므로 테일러 전개를 통하여 다항식으로 변환함으로써 대상 시스템에 대한 주파수 성분 별 분석이 용이해 진다. 일련의 과정은 Chance, et al. (1998)에 상세히 기술되어 있으므로 여기서는 생략한다. 전술한 과정을 통해 시스템을 수학적으로 표현한 식 (6)은 식 (9)와 같은 형태로 귀결된다.

여기서, 벡터 {

식 (9)를 정리하면 최종적으로 1차 주파수 응답함수를 식 (11)과 같이 네트워크 파라미터 및 지연 연산자로 표현된 형태로 얻을 수 있다.

비선형 시스템의 응답을 예측하기 위해서는 1차 주파수 응답함수 뿐만 아니라 고차의 주파수 응답함수를 얻을 필요가 있다. 2차 주파수 응답함수를 얻기 위해서는

식(12)는 시스템의 응답이 두 개의 조화 기진력에 대한 1차 응답 성분과 두 조화 기진력의 합 (

여기서, {
식 (11)과 식 (13)에 주어진 시스템의 1차 및 2차 주파수 응답함수를 식 (14)의 Volterra 급수에 대입함으로써 임의의 외력을 받는 비선형 시스템의 응답을 2차의 정확도로 손쉽게 예측할 수 있다. 이러한 일련의 과정을 불규칙 파랑하중을 받는 라이저의 동적 응답 예측에 적용하고자 한다.
앞서 언급된 방법론을 비교적 단순화된 라이저 모델의 동적 응답 예측문제에 적용하여 방법론의 유효성을 검증하였다. 460m의 길이를 가지는 균일단면의 라이저가 플로터가 연결되지 않은 상태에서 동일 수심의 해저 바닥에 위치한 지지부에 힌지 연결된 것으로 가정하였다. 라이저는 연강재질로 제작된 것으로 가정하였으며, 400mm의 외경과 16mm의 두께를 가지는 것으로 하였다. 라이저에 작용하는 환경하중은 파랑에 의한 관성력 및 저항력으로 식 (15)에 보인 바와 같이 Morison 식에 따라 추정하였다.
여기서,
NARX 모델의 네트워크 파라미터를 결정하기 위해서 0.1~1.5 rad/sec에 걸친 백색소음의 특성을 가지는 파랑하중을 구조물에 부가하여 구조물의 동적응답을 얻었으며, 이를 통해 시스템을 식별하고 주파수 응답함수를 도출하였다. 백색소음의 특성을 가지는 파랑하중은 시스템이 모든 주파수 성분에 걸쳐 같은 크기의 기진력을 경험하게 하는 것으로 시스템의 특성이 모든 주파수 영역에 대해 고른 정확도를 유지하게 하기 위함이다.
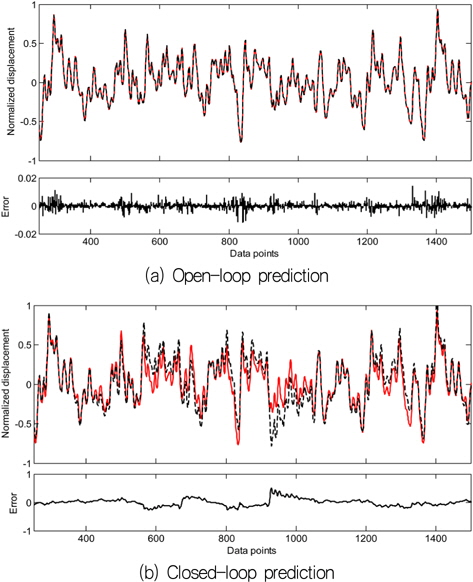
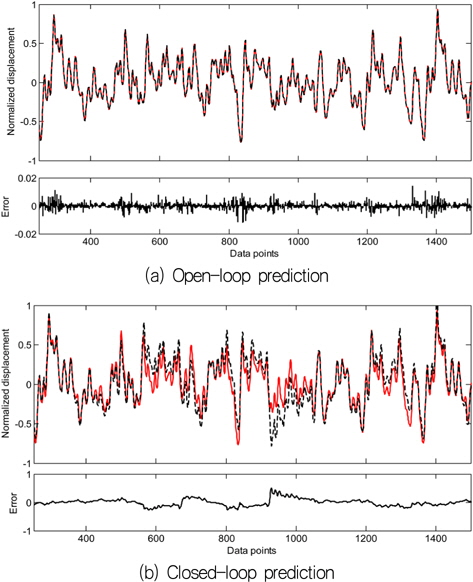
시스템 식별에 사용될 입력 값과 출력 값에 대한 시계열이 비선형 유한요소해석을 통해 얻어졌으므로, 이를 이용하여 네트워크를 학습시켜 최적화된 네크워크 파라미터를 도출하였다. 시스템의 입력은 불규칙 파랑의 파고이며 시스템의 출력은 라이저 최상단 위치에서의 수평방향 변위로 설정하였다. NARX 모델에 적용된 뉴런의 개수는 7개이며 입력 및 출력 값의 길이 또한 7로 하였다. Fig. 2는 경사 하강법을 통해 결정된 NARX 모델의 시간 영역에서의 예측 성능을 나타내는 그림으로, 시스템의 입력 및 진 출력을 이용하여 다음 한 스텝의 출력을 예측하는 개방 루프의 예측과, 시스템이 예측한 출력을 입력으로 피드백 받아 다음의 여러 스텝의 출력을 연속적으로 예측하는 폐쇄 루프의 예측 결과를 보여준다. 개방 루프의 경우 매우 정확한 예측 결과를 주는 것을 확인할 수 있으나, 실 적용 시에 사용될 폐쇄 루프의 경우 네크워크 학습에 적용된 데이터를 대상으로 함에도 불구하고 그 정확도가 상대적으로 떨어지는 것을 확인할 수 있다. 폐쇄 루프의 예측 성능을 향상시키기 위해서는 자유도가 높은 네트워크 구조를 이용하여 보다 많은 데이터를 통한 학습이 필요한데 이는 방대한 계산시간을 요구하는 작업으로 그 효용성이 상대적으로 떨어진다. NARX 모델의 이러한 단점을 극복하기 위해서 본 연구에서는 식별된 NARX 모델로부터 주파수 응답함수를 추출하는 주파수 영역 접근법을 시도하였다.
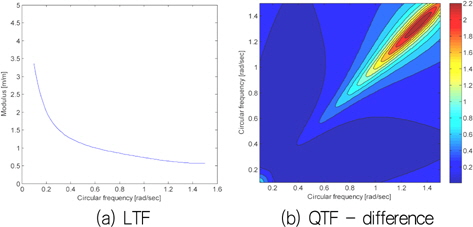
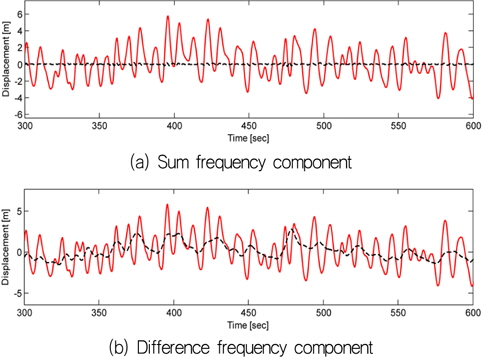
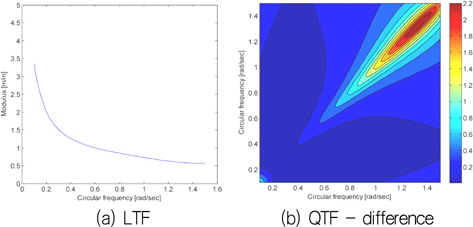
Fig. 3은 NARX 모델에 조화진단 기법을 적용하여 도출한 1차 및 2차 주파수 응답함수를 나타낸다. 1차 주파수 응답함수의 크기는 주파수가 작아질수록 커지는 경향을 보이는데, 이는 고려 대상 구조물의 고유주파수가 매우 낮은 영역에 존재하고 있음을 간접적으로 나타내는 결과로 이해할 수 있다. 2차 주파수 응답함수는 합 주파수 응답함수와 차 주파수 응답함수로 구분이 되는데, 합 주파수 응답함수의 경우 그 크기가 상대적으로 매우 작아 별도로 도시하지 않았다. 합 주파수의 응답이 상대적으로 작게 나타나는 것은 구조물의 고주파 응답들이 유체입자와 구조물의 변형속도의 제곱에 비례하여 작용하는 파저항력에 의하여 빠르게 감쇠되기 때문인 것으로 판단된다. Fig. 3(b)에 보인 차 주파수 응답함수의 경우,
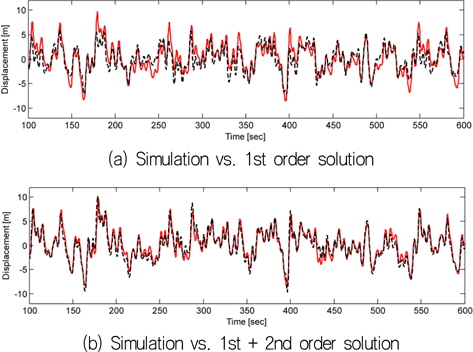
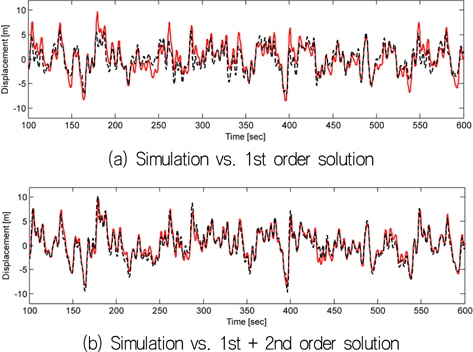
Fig. 4는 도출된 주파수 응답함수를 Volterra 급수에 적용하여 생성한 시스템 응답의 시계열을 네트워크 학습에 적용한 시스템 응답의 시계열과 비교 도시한 그림이다. Fig. 4(a)에서 확인할 수 있듯이 1차 성분만을 이용하여 생성한 시계열의 경우 시스템의 응답을 비교적 근사적으로 재현해 내는 것을 확인할 수 있으나, Fig. 4(b)의 경우와 같이 2차 성분까지 포함하는 경우 상대적으로 더욱 정확한 예측 결과를 얻을 수 있음을 확인할 수 있다.
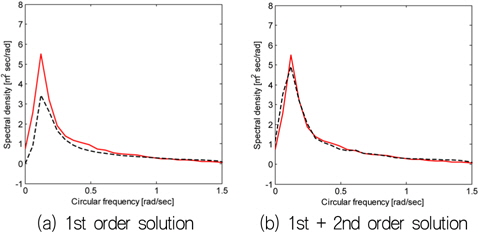
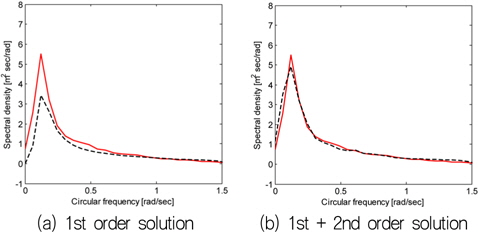
Fig. 5는 Fig. 4에 보인 시계열을 퓨리에 변환하여 얻은 응답 스펙트럼을 나타낸다. 응답 스펙트럼을 통해 확인할 수 있듯이 1차 성분을 통해 생성된 시계열은 약 0.5rad/sec 이하의 저주파수 영역에서 상대적으로 작은 에너지를 지니고 있으며, 2차 성분까지 고려한 시계열의 경우 이러한 차이가 없어지게 된다. 이러한 경향은 Fig. 4에 나타낸 시계열의 2차 성분은 저주파수 영역의 대변형 응답과 관련이 있음을 짐작할 수 있다.
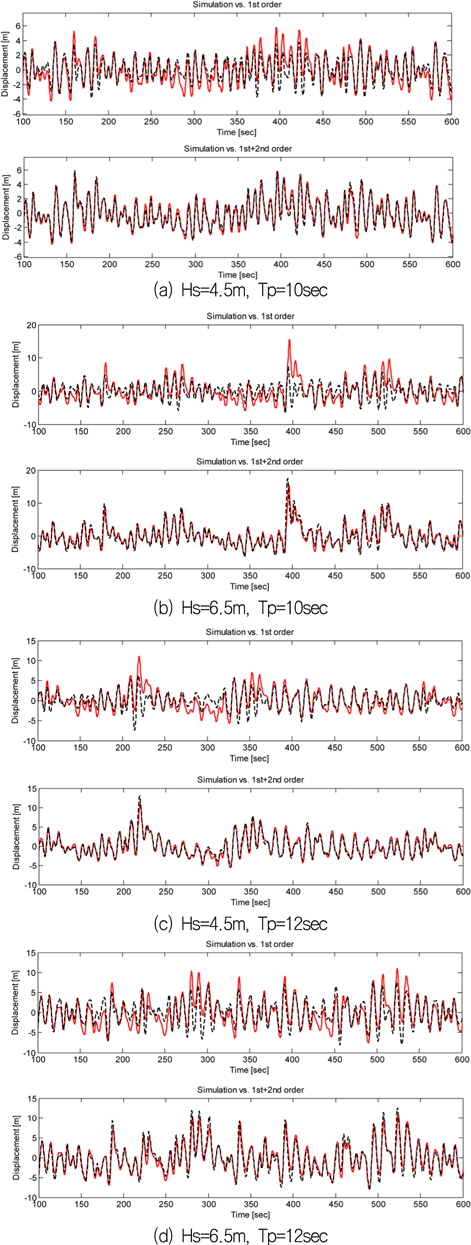
파랑하중에 노출된 라이저에 대한 시스템 식별이 이루어졌으므로 임의의 파 스펙트럼에 노출된 라이저의 동적 응답을 도출된 주파수 응답함수와 Volterra 시리즈를 이용하여 예측하였다. 라이저의 동적 응답을 4개의 서로 다른 단기해상상태 하에서 예측하였으며, 단기해상상태는 식 (16)의 JONSWAP 스펙트럼으로 표현될 수 있음을 가정하였다.


여기서,
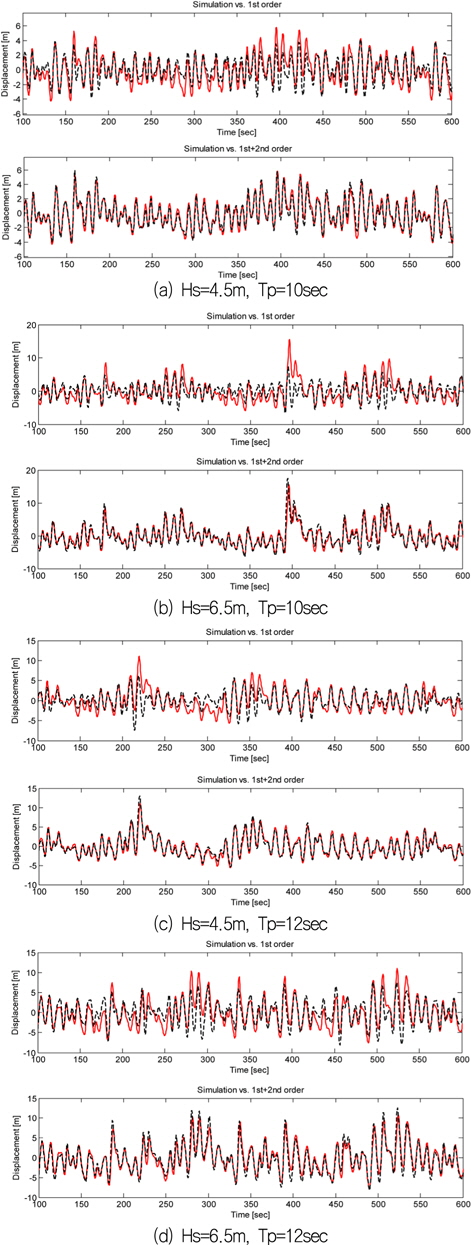
Fig. 6은 4가지 단기해상상태 하에서의 라이저의 응답 시계열을 나타내는 것으로, 비선형 유한요소 해석을 통해 얻어진 결과와 주파수 응답함수를 Volterra 급수에 대입하여 예측된 결과를 상호 비교한 그림이다. 모든 해상상태에 대해 공히 1차 성분만을 고려한 경우 저주파수 응답 성분을 재현해 내지 못하고 있음을 확인 할 수 있는 반면, 2차 성분을 포함시키는 경우 비선형 유한 요소해석을 통해 얻어진 결과를 비교적 정확하게 재현해 내고 있음을 확인할 수 있다. Volterra 급수를 이용한 예측 결과와 수치 해석 결과의 차이는
Fig. 7은
Fig. 8은 검토된 4개의 해상상태에서의 구조물 응답 시계열에 대한 응답 스펙트럼을 나타낸다. 모든 해상상태에 대해서 1차 성분만 고려한 예측 결과의 경우 저주파수 영역에 나타나는 에너지 성분을 전혀 재현해 내지 못하고 있음을 확인할 수 있는 반면, 2차 성분을 추가적으로 고려한 경우 저주파 응답을 비교적 정확하게 재현해 냄을 확인할 수 있다. 저주파 응답에 대한 예측은 해상 상태에 따라 조금씩 다른 정확도를 보이고 있는데, 이는 구조물의 대변형으로 인한 비선형 성분을 네트워크가 엄밀하게 식별해 내지 못한 결과인 것으로 판단된다. 또한, 앞서 언급된 바와 같이
본 논문에서는 NARX 모델을 이용하여 파랑하중을 받는 라이저에 대한 주파수 응답함수를 추출하고, 추출된 주파수 응답함수를 Volterra 급수에 대입하여 라이저 동적 응답의 시계열을 추정하였다. 본 연구의 내용을 토대로 다음과 같은 결론을 도출하였다.
인공 신경망 기법 기반의 비선형 시스템 식별법인 NARX 모델을 이용하여 파랑하중을 받는 라이저의 동적 응답에 대한 시스템 식별을 수행하고, 조화진단 기법을 이용해 주파수 응답함수를 도출하였다. 또한, 도출된 주파수 응답함수를 Volterra 급수와 결합하여 임의의 불규칙 파랑 하중에 노출되는 라이저의 동적 응답을 예측하는 시도를 하였다.
예측 결과의 시계열을 분석한 결과 1차 성분만을 고려한 예측 결과는 수치 해석을 통해 얻어진 라이저의 응답을 근사적으로 재현해 낼 수 있었으나 파 저항력의 제곱 성분에 의해 야기된 것으로 추정되는 저주파 응답을 재현하지는 못함을 확인하였다.
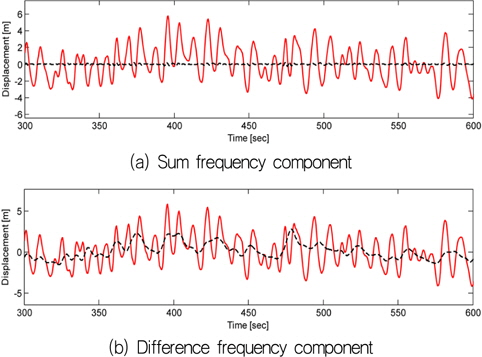
파 저항력의 합 주파수 성분에 의해 야기되는 고주파 응답은 유체입자와 구조물 변형 속도의 제곱에 비례하는 감쇠력에 의해 빠르게 감쇠하는 것으로 판단되며, 이는 조화진단 기법으로 추정된 2차 합 주파수 응답함수를 통해서 확인이 가능하였다.
응답 스펙트럼을 분석한 결과 1차 성분만을 고려한 예측 결과는 파 주파수 영역의 응답을 정확하게 예측하고 있음을 확인할 수 있었으나, 비선형 효과로 인해 야기되는 저주파 응답을 재현해 내지 못함을 확인하였다. 2차 성분을 추가적으로 고려한 경우 저주파 응답까지 비교적 정확하게 예측함을 알 수 있었다
본 연구에서 적용된 라이저의 동적응답 예측 기법은 다양한 형태의 파랑 하중에 노출되는 해양구조물의 설계 조건 선정에 매우 유용하게 적용될 수 있으리라 판단된다. 또한, 일반적으로 저주파로 응답하는 2차 성분까지 고려되는 플로터가 존재하는 경우에도 본 기법의 성능은 저하되지 않을 것으로 예측된다.
예측 결과의 정확도는 NARX 모델의 네트워크 파라미터의 정확도와 관련이 깊은데, 이는 네트워크의 설계, 입력 값의 길이 및 뉴련의 개수 등을 조절함으로써 그 정확도의 향상을 도모할 수 있을 것으로 기대되며 이는 추가적인 연구의 중요한 테마로 여겨진다.