Weather routing of a ship provides an optimal route to the destination by using minimal time or fuel in a given sea condition. These days, weather routing came into a spotlight with soaring fuel price and the environmental regulations of IMO and several countries. This study presents three scenarios of voyaging strategies for a ship and compared them in terms of the fuel consumption. The first strategy fixes the speed of a ship as a constant value for entire sailing course, the second fixes the RPM of the ship as constant for entire course, and the third determines the RPMs of the ship for each segment of the course. For each strategy, a ship route is optimized by using the A* search method. Wind, ocean current and wave are considered as ocean environment factors when seeking the optimal routes. Based on 7000 TEU container ship's sea trial records, simulation has been conducted for three scenarios, and the most efficient routing scenario is determined in the view of fuel consumption.
선박의 운항 비용 중 연료 및 기타 윤활유의 비용이 전체 비용 중 40% 정도를 차지한다 (Journée & Meijers.1980). 해운사의 경우 최근 국제 유가의 상승으로 선박을 운항하는 운용비용이 날이 갈수록 증가하고 있다. 또한 온실 가스규제 등으로 선박의 운항에서 연료 소비량을 줄이기 위하여 선체에 부가물을 붙여 저항을 감소 시키거나 선박의 정해진 Service Speed의 60%정도의 속도로 운항하는 등 (Jorgensen, 2010) 여러 노력들이 이루어지고 있다 (EMEC, 2010). 최적항로 계획은 이러한 연료 소비량 감소를 위한 노력의 하나로써 주어진 해상환경에서 최소의 연료로 목적지까지 도달하기 위한 방법을 연구하는 것이다. 최적항로 계획(Optimal ship routing)은 해상의 날씨를 기반으로 이루어지기 때문에 Weather Routing이라고도 불린다. 지금까지 이루어진 최적 항로 도출에 관한 연구는 주로 항로 도출을 위한 최적 알고리즘에 관한 연구와 개발에 집중하여 이루어졌다. 최근까지 선행연구들에서 소개된 알고리즘으로는 담금질 알고리즘 (Komas & Vlachos, 2012), 유전알고리즘 (Atsuo, et al., 2011), 그리고 3차원 동적 프로그래밍 (Shao, et al., 2012) 등이 있다. 또한 연료 소모량의 최적화에 더하여 승무원의 안전을 고려요소로 하여 최적화를 수행한 연구와 (Delitala & Gallino, 2010) 등시선법을이용하여 연료 소모량을 목적함수로 두어 최적 항로를 도출한 연구가 있다 (Rho, 2013)
본 논문에서는 최적화 알고리즘을 적용하는데 있어서 어떤 방식으로 선박이 운항하여야 하는가에 더욱 초점을 맞추도록 한다. 선박의 항해 전략을 엔진의 RPM을 고정하여 운항하는 방식, 일정한 속도를 유지하도록 하는 방식, 그리고 구간별 최적 엔진 으로 속도를 변화 시키는 방식으로 총 세 가지 문제를 정의하도록 한다. 한 선박의 항해에 영향을 주는 환경 하중요소를 파와 바람 그리고 해양의 해류를 고려하여 선박의 선속 저하량을 계산한다. 이렇게 정의된 문제들을 A* 알고리즘을 이용하여 해결한다. 최적화 결과를 토대로 선박의 최적항로 생성에 있어 선박의 최적 항해 전략을 제시해 보고자 한다.
선박의 연료 소모량을 최소화 하여 운항하기 위해서는 여러 전략이 있을 수 있다. 우선 실제 선박의 운항에서 쓰이는 방법인 엔진의 회전 수를 일정하게 두고 항해를 하는 방법이 있다. 이 전략은 선박의 속도가 상황에 따라 변할 수 있으므로 속도에 자유도를 주는 것이다. 선박의 속력을 일정하게 두고 항해를 하는 방법은 반대로 선박의 속력이 일정하게 유지하기 위하여 구간별 해상 상황에 의한 속력 손실을 회전 수 변화로 보상해 주므로 에 자유도가 주어진다고 할 수 있다. 그리고 상황에 따라 선박 엔진의 회전 수를 변화시켜 항해를 하는 방법은 RPM과 속도에 자유도를 부여하는 것이다. 이와 관련하여 선박의 RPM혹은 속도를 정하는 문제는 여러 항구를 거쳐 가는 선박의 문제에서 다루어져 왔다(Fagerholt, et al., 2010). 본 논문에서는 위 세 가지의 전략을 통해 최적 항로를 도출 하여 비교 분석을 하고자 한다.
2.1 고정 속도 운항에 의한 경로 최적화: Scenario 1
이 전략은 선박의 속력이 일정하고 구간에 따라 RPM이 변동되어 속도가 고정되는 방식이다. 일반적으로 선박이 운항할 때 필요한 동력

subject to

여기서 는 선박의 고정 속력이며,
2.2 고정 운항에 의한 경로 최적화: Scenario 2
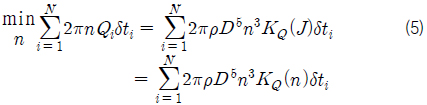
실제 선박의 항해에서는 엔진 회전 수를 고정하여 운항 하게 된다. 이를 위해 선박이 정해진 시간 내에 가기 위한 최적의 고정 RPM을 도출해 내야 한다. 다음은 이 최적화 문제에 관한 정의이다.

여기서
subject to


여기서

일반적인 대형선박의 경우 엔진에 감속기와 기어박스가 장착되어 있지 않으므로 엔진 회전수와 프로펠러의 회전수는 같다. 그러므로 이 문제는 목적함수는 엔진 회전 수
2.3 구간별 고정 RPM운항에 의한 경로최적화: Scenario 3
마지막 최적화 시나리오로 이 경우는 2.2 에서 나타날 수 있는 속력의 변화와 2.1에서 나타날 수 있는 엔진 회전수의 변화 모두가 일어날 때이다. 구간별 최적RPM 을 도출하기 위한 식은 2.2에서의 식(5)의 식과 거의 비슷하다고 할 수 있다. 다음은 구간별 최적 RPM운항을 위한 문제의 정의이다.
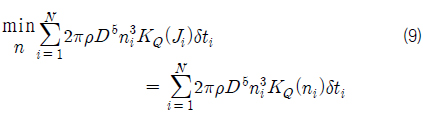
subject to


식 (10)에서
선박의 실제 운항에서 파와 바람을 만났을 때 선박 속력의 저하가 일어난다. 이 선박 속력의 저하를 정확히 계산하기 위해서는 선박의 부가 저항을 계산하여 내항 문제를 풀어야 하지만 실제 계산 시간이 오래 걸리고 방법이 지나치게 복잡하다. 그러므로 본 논문에서는 Beaufort Number (BN)를 기반으로 한 선박 속력 저하 식을 이용하도록 한다 (Kwon & Kim, 2005; Townsin & Kwon, 1993). 파와 바람에 의한 영향에 더하여 대양의 조류에 의한 선박의 속력 변화를 고려해야 한다. 일반적으로 선속에 비하여 조류의 속도가 충분히 작을 때에는 조류의 속도를 선박에 대한 상대 속도로 넣는 것이 타당하다 (Journée & Massie, 2001).
3.1 파와 바람에 의한 선속 손실량 산정을 위한 약산식
이 식은 BN 을 기반으로 하여 계산이 이루어 진다. 이 방법은 BN 값이 6 이하일 때 정확성을 가진다 (Kwon & Kim, 2005; Townsin & Kwon, 1993). 선속 손실량 약산식은 다음과 같이 주어진다.

여기서, ∇는 선박의 배수량, 그리고
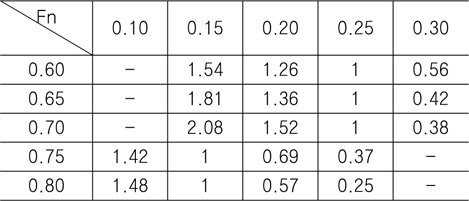
α values
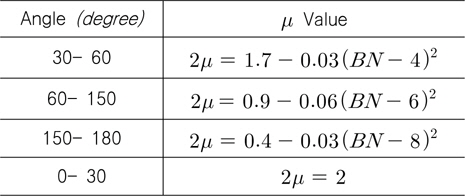
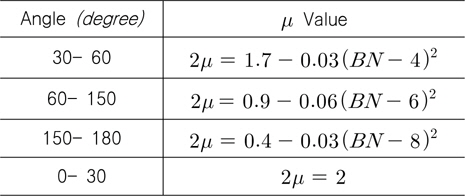
μ values
계절에 따라 조류의 양상이 바뀌지만 일반적으로 대양에서의 조류의 세기는 0.1~1.0 m/s 정도로 측정된다. 이러한 조류는 선박의 운동에서 상대속도로 반영 되어 표류 효과를 낼 수 있다(Journée & Massie, 2001). 이 경우, 선박의 속도를 지구 고정좌표계를 기준으로 다음과 같이 표현 할 수 있다.


여기서 V 는 선박의 속력, p는 선박의 방향각, 그리고 와 는각각 조류의 x, y 축 성분을 뜻한다. 조류가 있을 경우 표류에 의하여 원하는 위치로 갈 수가 없게 된다. 그러므로 적절한 방향각의 조절이 필요 하다. 적절한 방향각의 조절이 된다면 실제 선박의 진행 방향은 원하는 방향 p가 되어야 한다. 방향각의 수정 값은 다음을 통해서 얻어질 수 있다.

여기서

(16) 식을

위의 식 (17)과 같이 표현되고, 이제 조류에 의한 선박 속력의 변화는 다음과 같이 쓰여 질 수 있다.

여기서 이고
조류에 의한 선속의 변화 그리고 바람과 파에 의한 선속의 변화는 동시에 일어나므로 한번에 이 모든 것을 고려하여 선속의 변화량을 계산하는 것은 상당히 복잡한 과정일 수 있다. 본 논문에서는 이 세 가지 환경 요소에 의한 전체 선속의 변화량 를 각 요소의 단순 합으로 계산 하도록 한다.

A* 알고리즘은 전통적으로 경로생성 문제에서 많이 쓰이는 알고리즘으로 완벽한 전역 최적화는 이루어 낼 수 없지만 빠른 계산 시간을 장점으로 가진다. 또한 본 논문에서 다루는 문제와 같이 Grid-Based Map 에서의 최적화 문제에서 A* 알고리즘을 통한 최적화는 전역 최적화 알고리즘인 Dijkstra Algorithm 에 의해 도출된 최적 Path에 비해 총 Cost가 0.4% 더 들었고 계산 시간은 21.9% 그리고 컴퓨터 메모리 필요량은 30.7% 낮은 결과를 보여준다. (Tolga & Abdullah, 2008)
A* 알고리즘에서 길을 찾아가는 방법은 평가함수
4.1.1 속도를 변수로 할 때
A* 알고리즘에서의 평가함수는 Cost Value와 Heuristic Value의 합으로 표현된다. 선박이 항해 중에 지나가는 위도와 경도를 좌표화 하여 (

그리고 Cost Value

여기서,

Heuristic Value 를 계산할 때의 가정은 현재 위치에서 다음 위치 (
4.1.2 엔진 회전수를 변수로 할 때
이 경우의 평가함수는 4.1.1에서 변수를 속도로 했던 것과는 달리 엔진 회전수가 변수가 되므로 앞서의 것과는 다른 평가함수를 가진다. Cost Value는 다음과 같이 정의된다.

여기서
Heuristic Value는 다음으로 정의 된다

엔진 회전 수를 변수로 적용한 평가함수의 Heuristic Value는 (
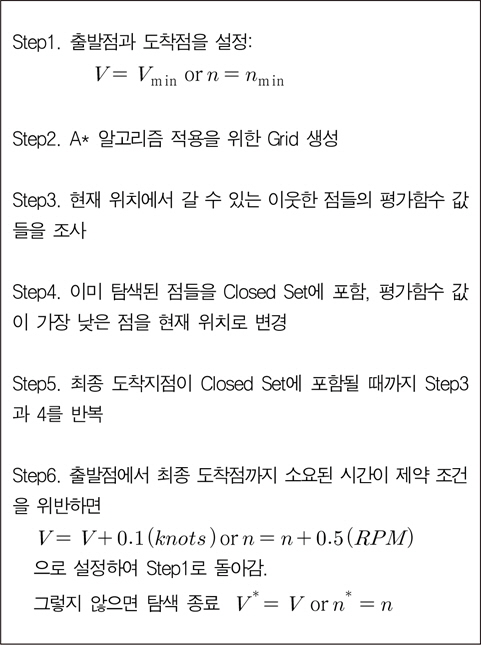
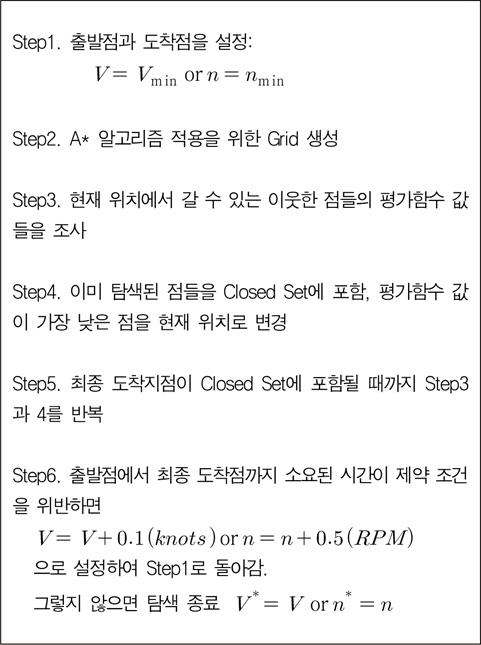
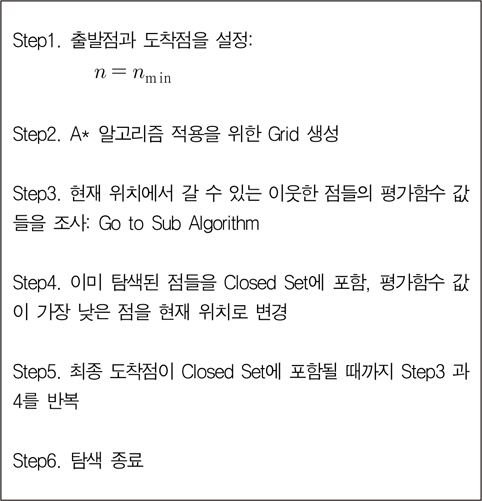
다음은 A* 알고리즘을 이용하여 Scenario1 과 Scenario2 문제의 계산을 수행할 때의 과정을 설명한 것이다.
Step 6. 에서
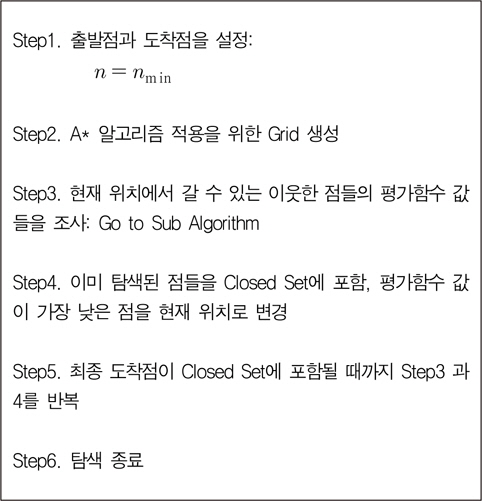
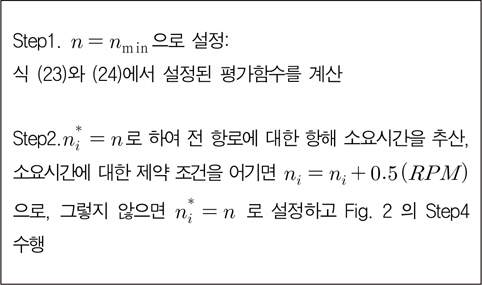
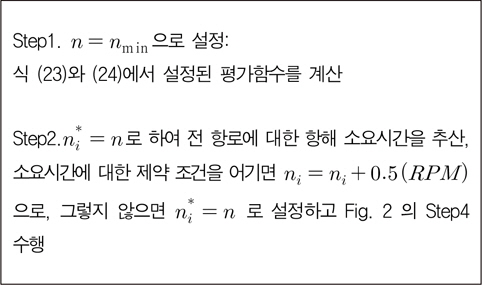
다음은 Scenario 3에 따른 문제 해결을 위한 Flow Chart 이다.
Fig. 1~4에서의 내용을 토대로 동경(Tokyo)에서 샌프란 시스 코까지 가는 항로를 항해하는 시뮬레이션을 수행하도록 한다. 이 시뮬레이션에서는 에너지 소모량 비교 기준을 RPM이 고정일 때의 대권항로 항해 시뮬레이션결과로 삼아 비교한다. 마지막으로 항해 할 때의 해상상황은 BN이 1에서 6 사이의 값을 가지도록 설정한다. 여기서 대권항로란, 구형의 지구를 대상으로 두 지점을 이었을 때 거리가 최소가 되는 항로를 의미한다. 즉, 선박이 정수 중에서 항해할 경우 이 항로가 최적항로가 되는 것이다.
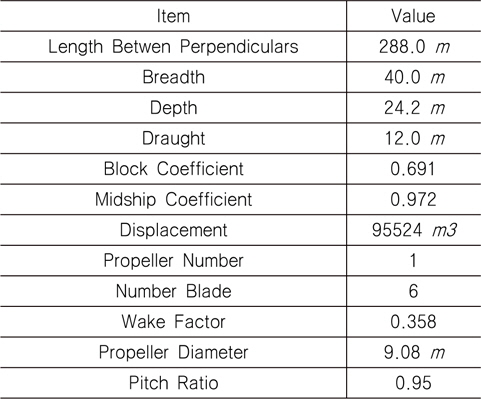
Table3는 시뮬레이션에서 사용된 7000TEU급 컨테이너 선박의 주요 치수를 나타낸 것이다. 그리고, 앞서 2.2에서 언급 된 것 처럼, 토크 계수
[Table 3] Principal dimension of subject ship
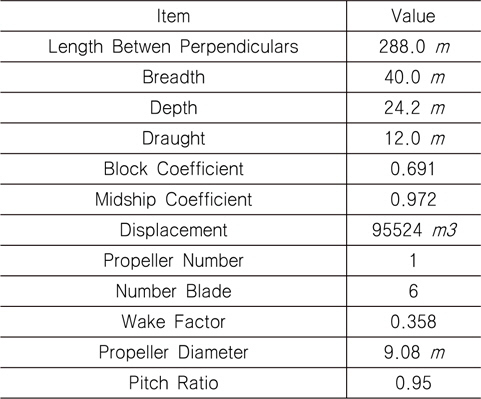
Principal dimension of subject ship

그리고 정수 중에서의 속도

여기서

여기서
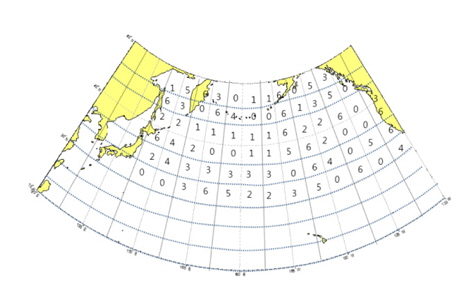
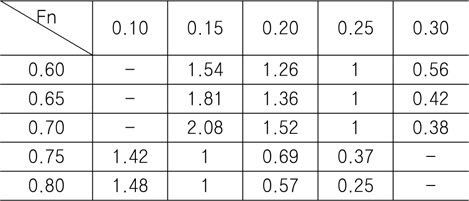
본 연구에서 시뮬레이션을 수행한 항로는 동경에서 샌프란시스코까지의 항로를 대권항로를 기준으로 총 40등분을 하고 총 항해시간의 제약조건은 240시간으로 하여 매 6시간 단위의 구간을 기준으로 경로를 최적화 한다. 선박이 낼 수 있는 속도의 범위는 17노트에서 25노트로 제약을 둔다. 또한 엔진 회전수는 분당 65회 에서 90회로 제약한다. 해상 환경 중 해류의 속도는 0.2m/s 로 일정하게 하고 해류가 흐르는 방향은 해류의 일정한 패턴을 바탕으로 위도 180도 경도 40도를 중심으로 하는 타원에 근사시키고 그 접선의 방향으로 설정한다. 또한 바람과 파의 지표인 Beaufort Number는 BN = 3 + round(3.3cos(x) sin(y)) 로 설정하여 0에서 6까지의 값을 갖도록 설정한다. 여기서 x와 y는 각각 지구의 위도와 경도를 의미하며, round는 반올림 함수를 뜻한다.
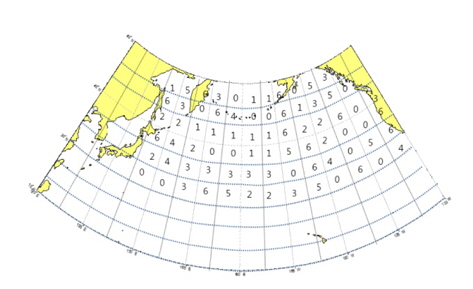
Fig. 4는 시뮬레이션을 수행할 해상환경을 BN값으로 계산하여 지도 위에 숫자로 표시한 것이다. BN 값은 앞서 나온 식에서 위도와 경도를 각각 5도 7.5도씩의 간격을 잡아 계산한 것들을 대표 값으로 표시한 것이다.
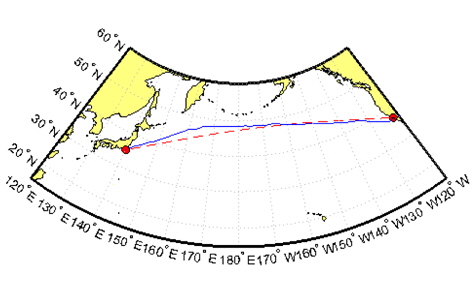
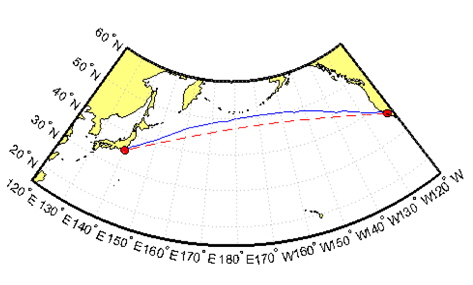
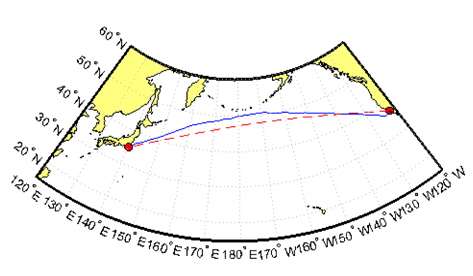
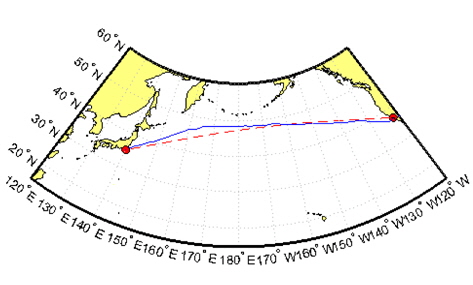
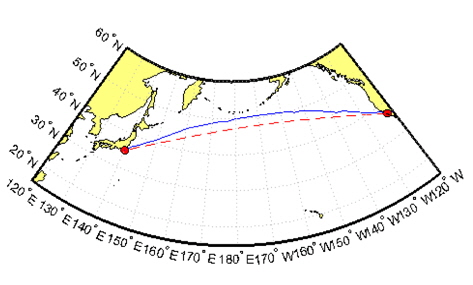
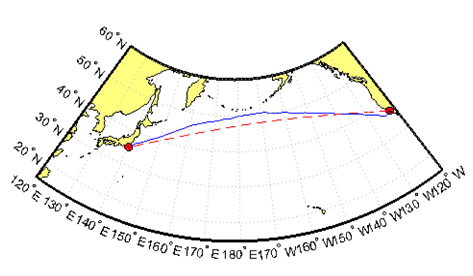
Fig. 5~7은 세 가지 시나리오에 대한 최적화를 수행하여 각각 의 최적항로를 찾아낸 것을 지도 위에 표시한 결과이다.
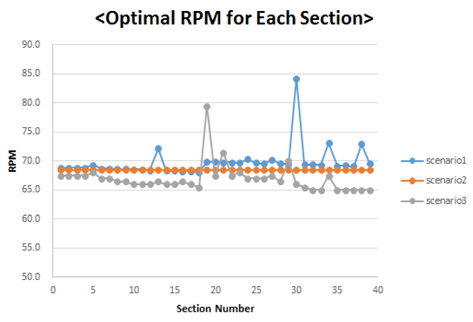
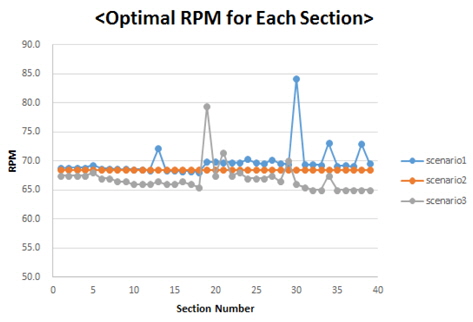
Fig. 5-7에서 붉은색 점선은 대권항로를, 푸른색 실선은 최적 항로를 나타낸다. 결과 자료에서 보이듯이 각각의 문제에 따라 최적 항로가 다르게 나타난다는 것을 알 수 있다. 다음 그림은 구간별 RPM을 최적화 했을 시 최적 RPM을 그래프로 나타낸 것이다.
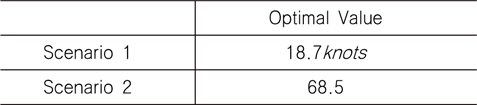
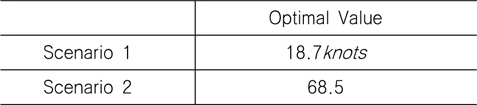
Fig.8 에서 구간별 최적 RPM 값은 65에서 92의 값을 가지는 것을 알 수 있다. RPM값이 상대적으로 높은 구간에서의 해상 상황이 상대적으로 더 나빴다는 것을 알 수 있다. 다음 표는 속도를 고정 했을 때와 RPM을 고정하여 항해를 했을 때의 전체 구간의 고정 속도 값과 고정 RPM 값을 나타낸 것이다.
Table 4 에서 고정 RPM의 최적 값 68.5 RPM은 정수 중에서 18.7 knots의 속력을 낼 수 있는 회전 수이다. 이제 각 최적화 시나리오 별 에너지 소모량과 최적화 시나리오에서 나온 최적 속도 또는 RPM을 유지하여 대권항로를 항해할 때의 값을 비교하여 보도록 한다.
Optimal & speed
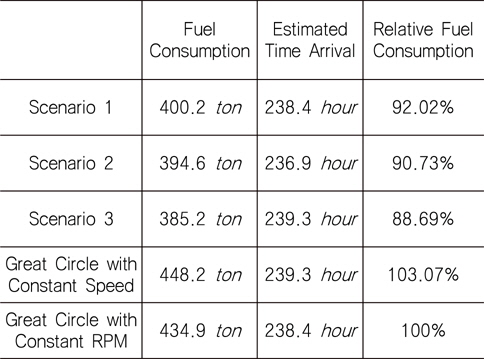
Table 5 에서 연료 소모 비율은 실제 선박의 항해에서 쓰이는 방법인 고정 RPM을 기준 대권항로 시뮬레이션에서의 결과를 기준으로 비교한 것이다. 대권항로 항해 시뮬레이션에서 속도를 고정 시켰을 때의 값은 19.4knots이고 RPM을 고정 시킬 때의 값은 70 RPM이다. 이 값들은 Table 4에서 나온 값으로 대권항로를 운항 할 경우 시간 제약 조건을 위반하는 결과가 나오므로 Section 2.1과 Section 2.2에 제시된 문제에서 경로를 대권항로로 제약하여 최적화를 수행한 값이다. Table 5에서 보여주는 각 시나리오에 따른 최적화 결과 대권항로의 연료 소비에 비해 Scenario1는 7.98% Scenario2는 9.27% 그리고 Scenario3에서는 11.31%의 연료 측면에서의 절감효과를 가져오는 것을 알 수 있다. 또한 Scenario 1과 2를 비교해 보면 고정 RPM을 두고 항해를 하는 전략이 속도를 고정하여 항해를 하는 것보다 연료 소모량 측면에서 더 나은 결과를 보여준다는 것을 알 수 있다. Scenario 1에서는 특정 속도를 유지하기 위해 부가적으로 필요한 동력이 들어가는 반면, Scenario 2에서는 선속 저하 량을 보상하기 위한 부가 동력을 넣지 않기 때문에 위와 같은 결과가 나온 것으로 판단 할 수 있다.
[Table 5] Comparison of fuel consumption and estimated time arrival
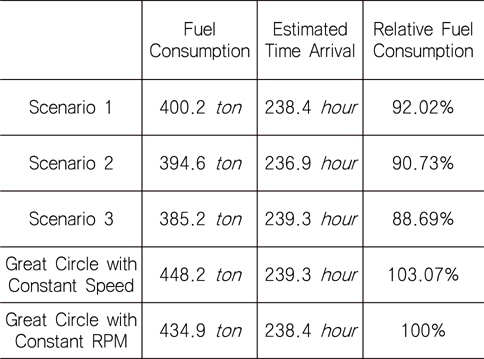
Comparison of fuel consumption and estimated time arrival
본 논문에서는 Path-planning 문제에서 많이 쓰이는 A* 알고리즘을 이용하여 엔진 회전 수를 고정하여 수행한 최적항로, 선박의 속도를 고정하여 수행한 최적항로 그리고 구간별 엔진 회전수를 달리하여 수행한 최적항로 문제를 해결하였다. 본 연구를 통해 다음과 같은 결론을 내릴 수 있다.
첫째, A* 알고리즘을 이용하여 여러 연료 최적화 문제에 대해 해결하였다. 둘째, Scenario 1 에서 3까지 제안된 문제를 해결한 결과 각 구간별 최적 RPM으로 찾아간 문제에서 더 큰 연료의 절감 효과 를 가져옴을 알 수 있다. 셋째, Scenario 3에서 제시 방법을 통해 중기적 일기예보를 바탕으로 실제 선박을 항해하는 사용자가 연료 절감의 측면에서 좀 더 나은 항해 계획을 세울 수 있을 것이다.
본 논문에서는 선박의 항해 전략에 따라 최적화를 수행하였고 구간별 최적 RPM을 찾아 가는 것이 최적의 방법임을 알 수 있었다. 하지만 본 논문에서는 연료 소비량만을 기준으로 최적화를 하였기 때문에 선박의 항로 중 해상 교통상황에 따른 경로설정의 문제 혹은 Parametric Rolling 등에 의한 선박의 안정성 문제를 다루지 않았다. 향후 연구에서는 이러한 점들을 고려하도록 해야 할 것이다.