In recent years, a number of multiple star systems have been proposed to orbit a binary pair as a result of photometric follow-up observations of eclipsing binaries. The nature of the proposed companions ranges from planetary to sub-stellar objects. Lee et al. (2009) were the first to propose such circumbinary companions to explain eclipse timing variations, suggesting that the short-period pulsating subdwarf binary HW Virginis (hereafter HW Vir) was being accompanied by two unseen circumbinary companions of mass 8.5
The observational technique which is used for the discovery of possible circumbinary companions is primarily based on the timing measurements of the primary eclipse of the binary star system. Considering the case when the primary is isolated and positioned at a constant distance to Earth, the time of primary eclipses in the future will follow a linear ephemeris relative from some reference epoch T0 with binary period P0. However, if an additional massive companion is gravitationally bound to the binary components, then the binary system will start to follow an orbital trajectory around the total system barycenter. This gives rise to the so-called light-travel time effect (LTTE) (Irwin 1952, Borkovits & Hegedues 1996). As a consequence of the finite speed of light, the arrival-time of photons will be delayed (advanced) as a result of the distance between the binary and the Earth being a maximum (minimum). The manifestation of this effect is a quasi-periodic change in the measured timings of the primary eclipses and is also known as eclipse timing variations (ETV). The precision with which timing measurements are obtained is mainly governed by the photometric quality of the data, the observing cadence during the eclipse, and the presence of star-spots. In general, timing measurements should be independent of spectral band observations although datasets with mixed timing measurements obtained from various filters could result in systematics uncertainties and possibly lead to a false interpretation of the period variations of an eclipsing binary (Go´zdziewski et al. 2012).
For nearly all systems with a proposed circumbinary companion, as mentioned above, there is a fundamental problem that raises doubts towards the correct interpretation of the measured eclipse timing variations. A common denominator for all systems is the three-body problem: two massive companions orbiting a binary star. From a dynamical point of view, such configurations naturally raise the question of orbital stability. The numerical demonstration of a long-lived stable three-body system could serve to further support the interpretation of observed timing variations as being directly caused by the perturbing effects of massive companions. One other possibility is that the period variations are indeed caused by additional companions, but in this case the orbital architecture must be significantly different than discussed.
As an example the only multi-body system that seem to follow stable orbits around a post-common envelope (evolved) binary is the NN Ser system (Beuermann et al. 2010, Horner et al. 2012a, Beuermann et al. 2013). Recently the planetary interpretation of the primary eclipse times of NN Ser was further supported by timing measurements of the secondary eclipses. Parsons et al. (2014) were able to rule out the possibility of apsidal motion of the orbit of NN Ser showing that the secondary eclipse timings followed the same trend as the primary timing measurements. Furthermore, a stable multi-body circumbinary system was recently detected using Kepler space-telescope data. Orosz et al. (2012) utilized the transit detection technique to detect two planets transiting a main-sequence primary star very similar to the Sun accompanied by a cooler M-type secondary.
In contrast to the stability and feasibility demonstrated for the two systems discussed in the previous paragraph, dynamical studies of the other circumbinary systems discussed above have instead revealed a very different picture. Rather than featuring proposed companions that move on dynamically stable orbits, the companions in those systems have instead been found to move on highly unstable orbits (with the exception of NN Ser). Typically, the companions will either experience close encounters resulting in the ejection of one or both components or there will be direct collision events. Several studies have recently focused on the orbital stability of the proposed circumbinary systems. The first study to test for the orbital longevity of any such post-common eclipsing binary system (HU Aqr) was presented in Horner et al. (2011). In their work they followed the orbits as part of a detailed dynamical analysis and demonstrated that the proposed two-planet system would be highly unstable, with break-up time-scales of less than a few thousand years. Two follow-up studies of HU Aqr were recently presented (Hinse et al. 2012a, Wittenmyer et al. 2012). In the first, where the authors attempted to determine new best-fit models to the observed timing data accompanied with orbital stability requirements.
In that work, the authors found a new orbital architecture for the proposed companions around HU Aqr, but again found that architecture to be highly unstable. Long-lived orbits capable of surviving on million-year timescales were found for HU Aqr only when additional orbital stability constraints were imposed on an ensemble of best-fit solutions, based on the Hill radii of the proposed companions. The key difference between the stable solutions found in this manner and the unstable ones that resulted solely from the observational data was that the stable solutions featured near-circular orbits for the two companions. Two further studies of the HU Aqr system (Go´zdziewski et al. 2012, Wittenmyer et al. 2012) both suggested that two-companion solutions could be ruled out for the system, with Go´zdziewski et al. (2012) pointing towards an alternative, single companion model providing the best explanation of the measured timing variations.”
There are several additional studies that demonstrate orbital instability and/or unconstrained orbital parameters of proposed multi-body circumbinary systems (HW Vir, SZ Her, QS Vir, NSVS 14256825, RZ Dra) and we refer the reader to the following sources in the literature (Horner et al. 2012b, Hinse et al. 2012b, Horner et al. 2013, Wittenmyer et al. 2013, Hinse et al. 2014a,b) for more details.
In this work we present the results of a dynamical orbit stability analysis of the two proposed circumbinary companions of the eclipsing binary SW Lyncis (Kim et al. 2010). In their timing analysis of historical plus newly acquired photometric observations the authors found the sound evidence of a 5.8-year cycle along with a somewhat less tightly constrained cycle of 33.9 years. In their quest to find a plausible explanation the authors attempted to explain (among other possible explanations) the timing variations with a possible pair of light-travel time orbits corresponding to two circumbinary companions. In their discussion on the 34-year cycle Kim et al. (2010) highlighted that the two conjectured companions are unlikely to approach each other within 5 au considering coplanar orbits. This statement motivated us to test the system’s overall stability by numerically evaluating the orbital trajectories using the osculating best-fit Keplerian parameters (as obtained from their light-travel time model) and their corresponding errors (Kim et al. 2010) as the initial conditions in this work.
This work is structured as follows. In section 2 we briefly review the mathematical formulation of the LITE effect resulting in the proposition of the two possible circumbinary companions. We highlight the underlying assumptions and also outline the derivation of the companion orbits from their associated LITE orbits. In section 3 we give a short description of the numerical techniques and methods used in this work. In section 4 we present numerical results of an orbital stability analysis for coplanar companion orbits. In section 5 we generalize and consider scenarios where the two companions move on mutually inclined orbits, as well as scenarios in which their orbits are coplanar, but their masses differ from those used in section 4. Section 6 concludes our analysis.
2. DETAILS OF LITE AND ORBITAL PROPERTIES OF SW LYN AND PROPOSED COMPANIONS
The mathematical formulation of the single-companion LITE effect was described in great detail by Irwin (1952). In its simplest version, the modelling of timing measurements requires a set of 2 + 5 parameters. The first two parameters describe the linear ephemeris of the eclipsing binary and the remaining five describe the size, shape and orientation of the LITE orbit. We remind the reader that the LITE orbit utilizes the two-body formulation and represents the orbit of the binary barycenter around the binary-companion center of mass. The first assumption in this formulation is that the binary orbit is small compared to the LITE orbit. A period variation due to LITE is then regarded as a geometric effect. In that case the binary is treated as a single massive object with mass equal to the sum of masses of the two components.
If T0 is chosen to be some arbitrary reference epoch, P0 measures the eclipse period of the binary, and considering the case of a single companion, then the times of primary eclipses at epoch E are given by
where
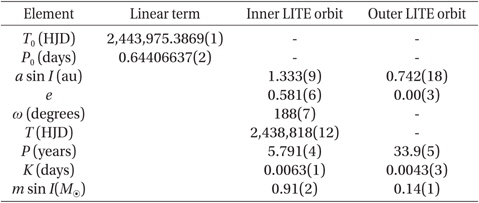
In the case of a second cyclic variation one often assumes the principle of superposition. Assuming the absence of mutual gravitational interactions between the two companions, the standard praxis in timing analysis-work usually considers two separated Keplerian orbits. Only the interaction between the companion and the combined binary mass is considered. Perturbations between the two unseen companions are neglected. The basis of a timing analysis then attempts to explain the total timing variation as the sum of two LITE orbits (Hinse et al. 2012b). All measurements are then simultaneously modelled during the least-squares minimisation procedure with possible weights. In Table 1 we reproduce the Keplerian SW Lyn LITE elements from Kim et al. (2010) for the two companions along with their 1-sigma formal uncertainties. We would like to highlight that these orbital elements were calculated neglecting any possible influence of external gravitational perturbations.
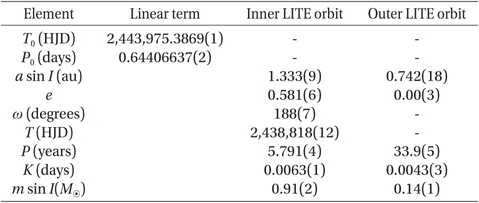
Best-fit elements (the first 7) of the two LITE orbits (determined from simultaneous fitting) as reproduced from (Kim et al. 2010, their table 3). K measures the semi-amplitude and is calculated from Eq. 4 in Irwin (1952). The minimum masses for the two companions is determined iteratively using the mass-function and are consistent with two separate Kepler orbits with the combined binary in one focus of the ellipse. Because the 4th body orbit is circular (e2 = 0.0) the argument of pericenter (ω) and time of pericenter passage (T) are undefined. Numbers in paranthesis denote the uncertainty of the last digit as adopted from Kim et al. (2010). The mass of the primary and secondary components are 1.77 M⊙ and 0.92 M⊙, respectively.
We will now direct our attention to the details of the binary and its proposed companions. SW Lyn is a detached eclipsing binary of Algol type with an orbital period of around 16 hours. The mass of the two components are 1.77 M⊙ and 0.92 M⊙ (Kim et al. 2010). From Table 1 we note that the shortperiod LITE orbit has an eccentricity of 0.58. The long-period LITE orbit is circular. The masses of the two components are found from the mass-function (Hinse et al. 2012a,b) and are therefore minimum masses with the sin I factor undetermined. The geometric orientation of the system can only be definitively determined in the case where the unseen companion is observed to eclipse or transit one or the other of the binary components. In that case, it becomes possible to determine the true mass of the unseen companion. In all other cases, the degeneracy between the mass and inclination of the system remains.
The Keplerian orbital elements of a companion can be derived from first principles. As a result of barycentric orbits and as pointed out in Hinse et al. (2012b) the eccentricity, the time of pericenter passage and the orbital period of the LITE orbit are the same for the associated companion orbit. Since the two orbits are in the same plane (not to be confused with the two companion orbits) the sin I factor are also the same. The only differences occur for the argument of pericenter and projected (or minimum) semi-major axes. With respect to the argument of pericenter the orbit of the companion is anti-aligned to its associated LITE orbit. We therefore have a 180 degrees difference between the two apsidal lines. The semi-major axis can be computed using one of two different methods. The first method makes use of Kepler’s third law. Since the minimum mass of the companion and its orbital period are known quantities the projected semi-major axis of the companion’s orbit is given as
where
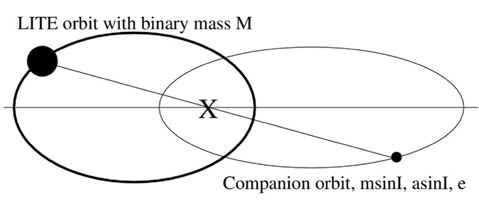
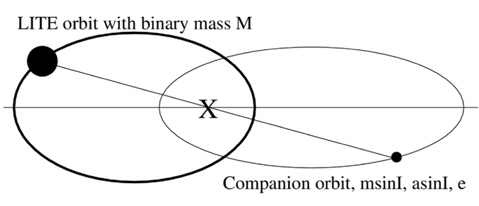
The second method considers the two orbits in their barycentric reference frames. To illustrate the difference between these two techniques, in Fig. 1 we plot a LITE orbit and its associated companion orbit as an example. Following Murray & Dermott (2001) the projected semi-major axis of the LITE orbit (
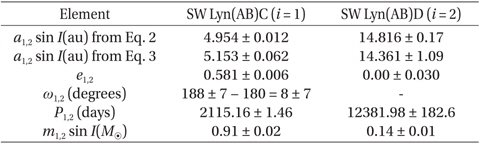
The right-hand side only contains known quantities listed in Table 1. In Table 2 we show numerical values of all known orbital quantities for the orbit of the two companions. The semi-major axis as computed from the two methods agree well with the discrepancies (at the 1% level) most likely resulting from the uncertainties of the best-fit parameters. At this stage we point out that throughout this study we adapt numerical values for the astrocentric orbits (Table 2) as calculated by Eq. 2.
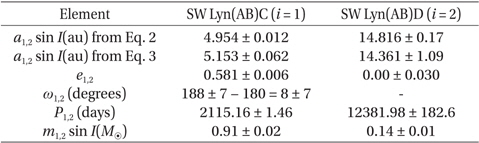
Astrocentric orbital elements of the two proposed companions derived from first principles and Kepler’s third law of orbital motion. The dynamical center corresponds to the binary barycenter with mass 2.69 M⊙. Uncertainties for the derived quantities have been obtained from standard error propagation assuming uncorrelated uncertainties.
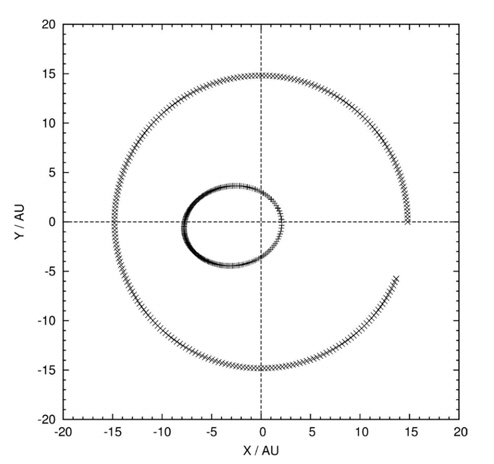
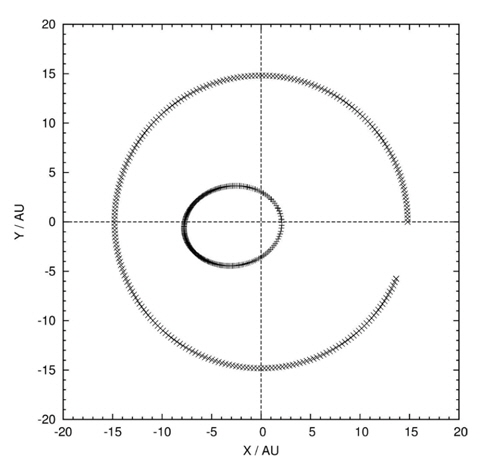
In Fig. 2 we show two Keplerian orbits of the companions perpendicular to the sky plane assuming coplanar orbits(
3. ORBIT INTEGRATION TECHNIQUE AND NUMERICAL METHODS
A dynamical analysis aims to investigate the temporal evolution of an ensemble of orbits located in the neighbourhood of the best-fit solution. In this work we utilise two distinct numerical methods. The first technique involves the orbit integration package MERCURY (Chambers 1999). This package allows the numerical integration of single orbits gravitationally interacting with each other. It offers several algorithms for the solution of the first order differential equations describing the system’s equations of motion. In this work we made use of the Bulirsch-Stoer method featuring adaptive time stepping to accurately resolve close encounters. In all our integrations we used an initial time step of 0.01 days. The integration accuracy parameter was set to 10−14. The package allows the specification of initial conditions in an astrocentric reference frame and is therefore suitable for our problem. We have previously applied this package in similar studies and we refer to Horner et al. (2011), Hinse et al. (2012b) and Hinse et al. (2014a) for numerical tests.
The other technique is the computation of a fast chaos indicator known as MEGNO (Mean Exponential Growth factor of Nearby Orbits) as introduced by Cincotta et al. (2003). The latter found widespread application in dynamical astronomy and celestial mechanics (Go´zdziewski et al. 2001, Hinse et al. 2010, Kostov et al. 2013) and is an effective tool to explore the phasespace topology of a dynamical system. In this work we have applied the MEGNO technique to the gravitational three-body problem with focus on the proposed companions around SW Lyn. Our computations have made use of the KMTNet* computing cluster (multicore supercomputer using 33 Intel Xeon X5650 cores each running at 2.7 GHz) to compute the dynamical MEGNO maps using the newly developed MECHANIC (Slonina et al. 2015) single task-farm software package.
The details of MEGNO are as follows. For a given initial condition of the three-body problem the equations of motion and variational equations (Mikkola & Innanen 1999) are solved in parallel. The MEGNO, usually denoted as <
4. ORBITAL STABILITY ANALYSIS - COPLANAR ORBITS
A fundamental unknown is the orbital orientation (sin
We first considered the most simple solution for the orbital geometry of the two unseen companions – coplanar orbits (following our earlier work; e.g. Horner et al. (2011), Hinse et al. (2012a,b), Wittenmyer et al. (2012, 2013)). The assumption of coplanar orbits is reasonable given that any companions would most likely have been formed from a single circumbinary protoplanetary disk. In all calculations the binary was treated as a single massive object in order to be consistent with the LITE formulation. Initial conditions for the two companions are listed in Table 2. The uncertainties in projected semi-major axis were obtained from standard error propagation.
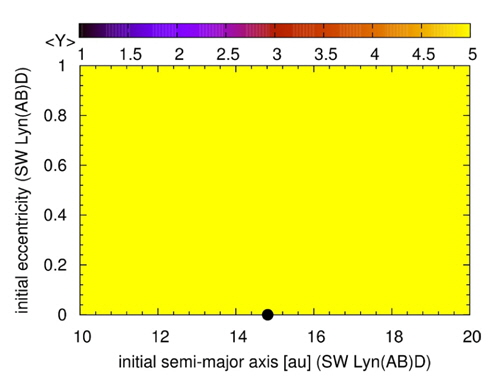
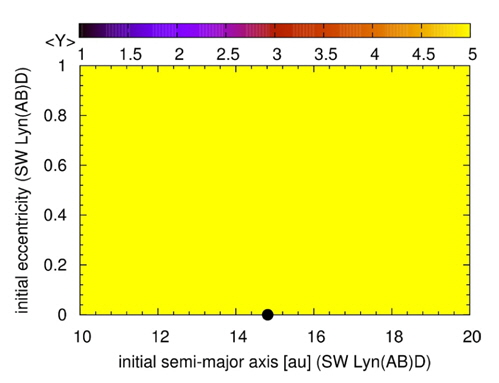
We first calculated a dynamical MEGNO map exploring the (
However, in the astrodynamical multi-body problem a chaotic orbit does not strictly imply instability. We therefore investigated the stability of single orbits by considering a large ensemble of initial conditions within the 1-sigma error uncertainties of the orbital parameters. In each integration the system was followed for 10,000 years. We investigated the effects of placing the proposed companions at different initial mean longitudes considering the range [0,360] in steps of 10 degrees. For the inner eccentric orbit we also investigated the influence of the argument of pericenter parameter by also considering the range [0,360] of this angle in steps of 10 degrees. This was not possible for the outer companion as the best-fit LITE orbit seems to be very circular. Hence the argument of pericenter is not defined. Systematic combinations of those angles were also considered and tested as part of our stability study. In addition we also varied the mass and eccentricities of the two companions.
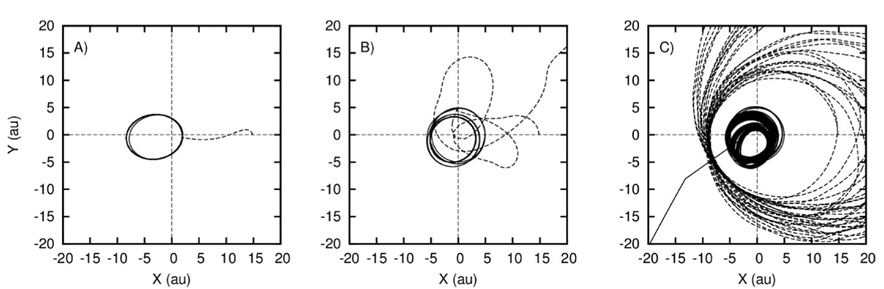
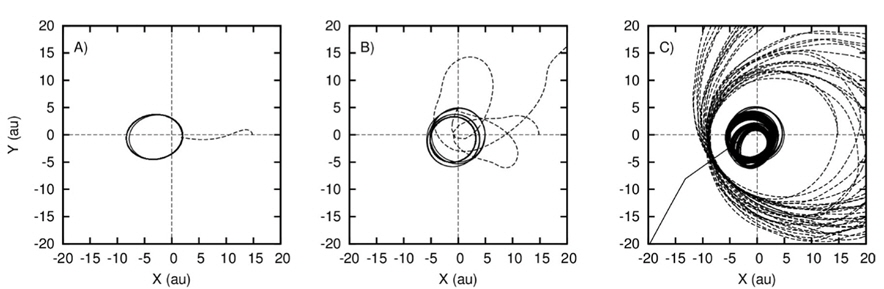
In all cases we found the system to be highly unstable with one of the components either being ejected from the system or colliding with the central binary. To illustrate our findings we show some results in Fig. 4. For Fig. 4A and Fig. 4B the inner companion collided with the central binary after just a few years. For Fig. 4C the orbit survived for 1,000 years. However, their time evolution obviously does not resemble the geometry of the two proposed companions as presented in Kim et al. (2010). In fact, this system is unstable in the sense that the outer companion collided with the central binary after 3704 years and the inner companion was ejected after 3281 years. We show these particular examples as the considered parameters should render the system to become more stable. In general low-mass and circular orbits will always have the effect to increase the longevity of a gravitational multi-body system. The solutions highlighted in this figure were chosen as they represent cases where the initial orbital parameters should have been the most promising in terms of the stability of the system - with low eccentricities and masses for the companion bodies.
5. Orbital Stability Analysis - Inclined Orbits
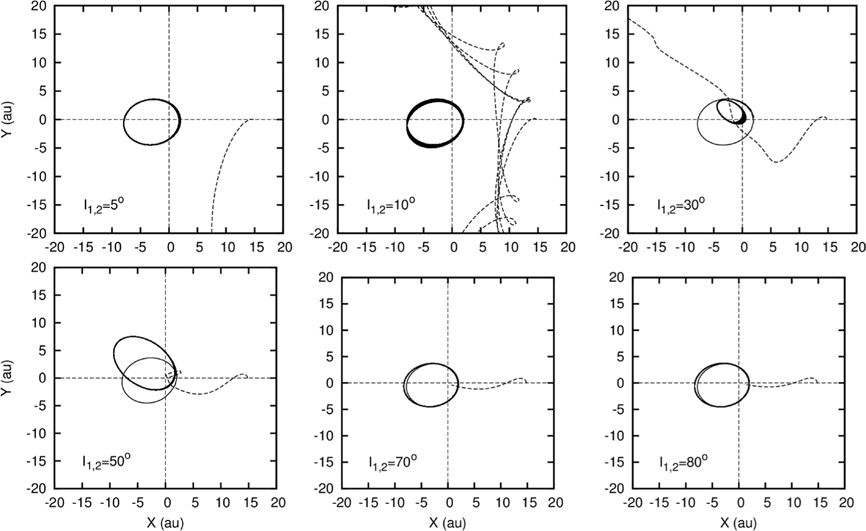
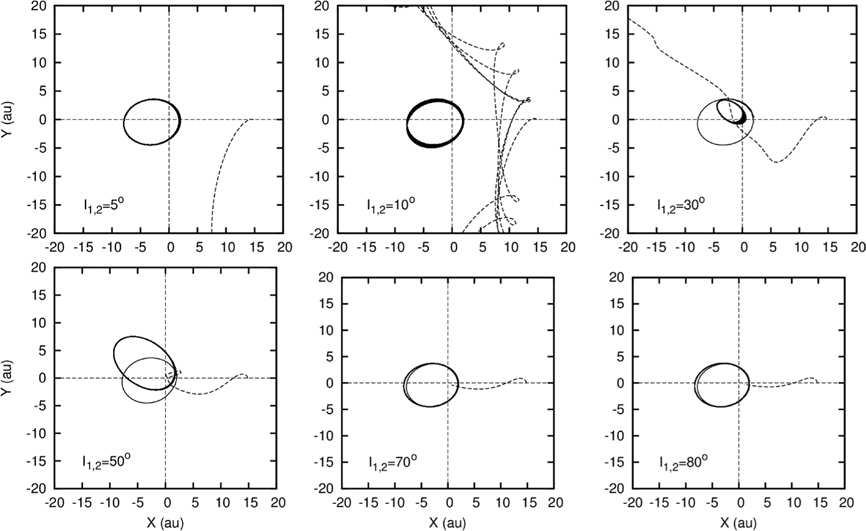
We have also considered various inclinations of the orbits relative to the sky-plane. The orbits were still considered to be coplanar relative to each other. We have therefore considered several values of the line-of-sight to sky-plane inclinations and scaled the masses accordingly for the two companions. However, we stress that the most likely geometric orientation are orbits with sin
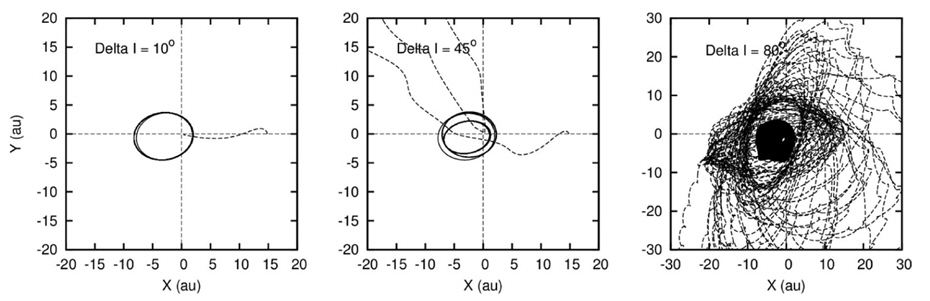
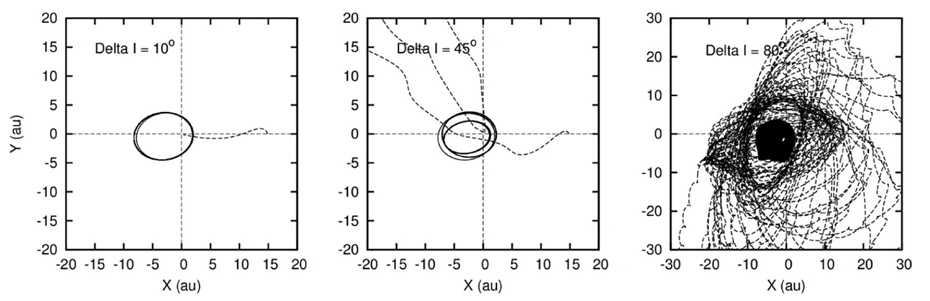
A final exercise in this stability study was to consider mutual inclinations between the two companions. Invoking a relative inclinations reflects the situation where the two companions have not formed from the same disk or their orbits have subsequently evolved as a result of unknown perturbations (i.e Kozai cycles due to a distant massive perturber) leading to a non-coplanar configuration. We have considered several relative inclinations and retained the mass of the two companions to be their minimum mass values. We considered several values of mutual orbital inclination, and in each case gave the system the maximal likelihood of stability by setting the mass of both companions to their minimum mass values. A subset of our test orbits are plotted in Fig. 6 considering three values of the relative inclination. Again, we find that the orbits tend to be highly unstable, and diverge from those proposed for the two companions on the basis of LITE analysis on very short timescales, drawing significant doubt on the currently proposed nature of the system.
In this study we have carried out a detailed orbital stability study of the multi-body system proposed to orbit around SW Lyn. In their work Kim et al. (2010) conjectured about the possibility of the existence of two circumbinary companions forming a quadruple system. The authors present substantial modelling work that aims to explain the observed timing variations by a pair of light-time orbits while pointing out that the outer companion might be doubtful. In this work we have rigorously shown that all our numerical integrations resulted in a swift disintegration of the proposed system, with the unseen companions being removed through collision or ejection on timescales of just a few thousand years, or less. This allows us to conclude that the proposed companions most likely do not exist or the companions exhibit a much different orbital architecture.
Several assumptions were made and in the following we would like to discuss some of them. First the mathematical formulation of the LITE effect assumes that the binary can be replaced by a single massive object positioned at the binary barycenter. This assumption might be acceptable provided that the companion orbits are much larger than the binary orbit. Otherwise, gravitational perturbations on the binary orbit will result in additional eclipse timing variation. Furthermore, all objects in this study were treated as pointmasses. This implies that we have not considered tidal effects between otherwise extended masses. However, at urrent time we are not aware of the possibility that tidal interaction could have a significant stabilising effect on the orbits of gravitationally interacting bodies. This possibility is an interesting question and might form part of a future investigation. A detailed treatment of tidal interaction is beyond the scope of this study.
Another assumption is the application of the superposition principle of two light-time orbits. In principle, this approach is incorrect, since the two companions will clearly perturb one another’s orbits. This in turn, would introduce a feedback to the binary orbit, which will also change as a result, driving more complex timing variation in addition to the geometric LITE effect. The effects of mutual interactions are important to take into account, especially when considering substeller mass companions on slightly to moderately eccentric orbits.
However, for smaller masses the principle of superposition applied to two light-time orbits is more correct as the two masses interact less with each other. This situation has recently been demonstrated through the generation of synthetic n-body data aiming to model the light-travel time effect caused by two interacting circumbinary planets (Hinse & Lee 2014c). These authors numerically created a synthetic dataset which mimics a twobody light-travel time effect. They successfully reproduced the known input parameters of the two planets from a leastsquares minimisation technique.
Recently, the LITE effect has been formulated in terms of Jacobi coordinates and might serve as an alternative o the superposition principle (Go´zdziewski et al. 2012). In their work the authors describe the LITE orbit as a result of several companions in a hierarchical order.
In this work, we have explicitly shown observed eclipse timing variations of the SW Lyn system cannot be the result of the unseen massive companions proposed by Kim et al. (2010). The system conjectured in that work proved to be unstable on timescales of just a few thousand years - far too short to be considered dynamically feasible. One possible explanation for this discrepancy might be that the observed 34-year modulation of the system may not be the result of an additional companion, but may instead have another explanation. In other words, the short-period modulation may well turn out to be the result of an unseen companion, with the long-period trend instead being the result of the magnetic activity of one or other of the binary components. Such a one-companion interpretation could well be more viable, since it essentially solves the instability issue. Indeed, such a solution was recently proposed to explain the observed timing variations of the HU Aqr binary system Go´zdziewski et al. (2012). In that work, the authors suggested that mixed timing measurements obtained from different photometric passbands (different spectral domains) might result in unaccounted correlated (red) noise in the timing data. The detection of a single LITE orbit with significant confidence was recently announced (Lee et al. 2013). However, if the short-period modulation is truly associated with a companion in SWLyn, then why does it have a large eccentricity? Large eccentricities are usually explained by the gravitational influence by additional bodies and would point towards an outer companion. Therefore, an additional explanation would be that the period modulation is due to two companions, but exhibiting a substantially different orbital architecture from the one found by Kim et al. (2010).
The questions concerned SW Lyn are far from answered and future observations will contribute towards a better understanding of this interesting system. Additional monitoring (Pribulla et al. 2012, Sybilski et. al.) of this system that leads to precise timing measurements and additional information is suggested in order to unveil the true nature of the possible companions.