The edge in the image is a part which the brightness changes rapidly between the object and the object or objects and background, and includes information of the features such as size, position, orientation, and texture of the object. The edge detection is the technique that acquires these information of the images, and now the researches to detect edges are making steady progress. Typical conventional edge detection methods are Sobel, Prewitt, Roberts using the first derivative operator and Laplacian method using the second derivative operator and so on. These methods is more or less insufficient that the characteristics of the edge detection in the image added salt and pepper noise. therefore, in this paper, an edge detection algorithm using modified mask that applies different size mask according to noise density of local mask is proposed.
영상에서 에지는 물체와 물체 사이 또는 배경과 물체 사이에 나타나는 밝기 변화가 급격한 부분이며, 영상 특징을 분석하기 위한 중요한 요소이다. 에지는 입력 영상에 대한 물체의 위치, 모양, 크기 등의 다양한 특성 정보를 포함하며, 에지를 검출하기 위한 연구가 활발히 진행되고 있다. 기존의 방법에는 1차 및 2차 미분을 이용한 Sobel, Prewitt, Roberts, Laplacian 등이 대표적이다. 그리고 최근에는 복잡한 수식으로 이루어진 Fuzzy, SVM, Wavelet에 기반한 방법들이 이용되고 있다[1-4].
기존의 1차 및 2차 미분에 기반한 에지 검출 방법은 인접화소에 가중치를 적용한 수평, 수직이나 사선 방향의 마스크를 컨벌루션하여 에지를 검출하며, 연산이 비교적 간단하여 처리 속도 면에서 우수한 특성을 나타낸다[5]. 그러나 기존의 에지 검출 방법은 마스크 화소 위치에 가중치가 고정되므로, salt and pepper 잡음에 훼손된 영상에서 에지 검출 특성이 다소 미흡하다.
따라서 본 논문에서는 salt and pepper 잡음 환경에서 효과적으로 에지를 검출하기 위하여, 변형된 마스크를 이용한 알고리즘을 제안하였다. 제안한 알고리즘은 국부 마스크의 잡음 밀도에 따라, 영상의 중심화소를 기준으로 처리 마스크를 다르게 적용하며, 정렬 벡터와 가중치 벡터에 의해 최종 에지를 구한다.
제안한 방법의 타당성을 입증하기 위하여, 시험 영상으로 512×512 크기의 Barbara(
기존의 에지 검출 방법에는 1차 미분에 기반한 Sobel, Prewitt, Roberts 방법 등이 있다[5].
중심화소(
여기서
최종 에지 출력은 식 (2)와 같이 정의된다.
식으로부터
Sobel, Prewitt, Roberts 방법은 에지 검출 방법이 거의 유사하나, 각각의 마스크 크기 및 가중치의 위치가 상이하다. 이러한 차이로 인하여 각각의 마스크에 대한 특성이 다르게 나타난다. 각 방법들은 수평 및 수직 방향의 마스크 또는 사선 방향의 두 마스크로 구성되며 각 마스크를 입력 영상에서 컨벌루션하여 기울기를 구한다. Sobel 및 Prewitt 기울기는 식 (4)와 같다[5-6].
여기서 Sobel 방법인 경우
Roberts 방법의 기울기는 식 (5)와 같이 표현된다[5-6].
각 방법들의 최종 에지 출력은 식 (2)와 같이 표현된다.
본 논문에서는 salt and pepper 잡음 환경에서 효과적으로 에지를 검출하기 위하여, 변형된 마스크를 제안하였다. 제안한 알고리즘은 영상의 중심화소를 기준으로 3 × 3영역에서 각 화소 위치에 해당하는 화소값을 추정하기 위하여 국부 마스크
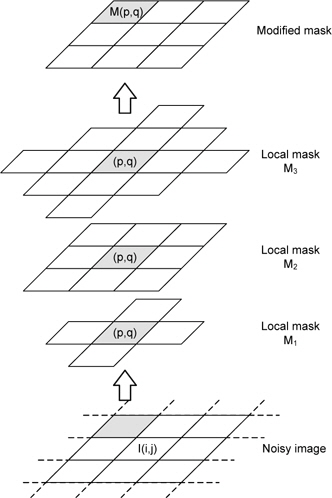
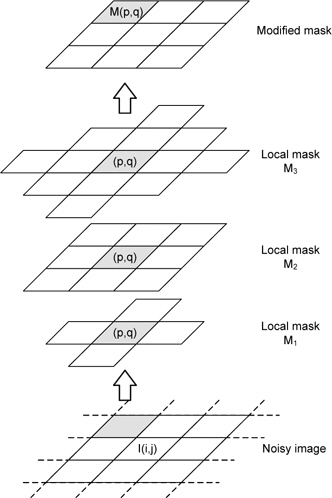
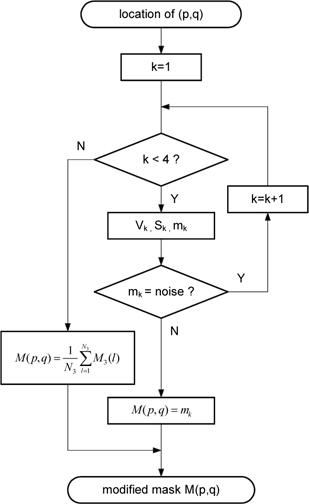
그림 1은 입력 영상으로부터 변형된 마스크를 얻는 과정이다. 변형된 마스크의 새로운 화소 추정 과정은 다음과 같다.
먼저, (p,q)를 중심위치로 하는 국부 마스크
여기서
국부 마스크의 잡음 밀도를 판단하기 위한 파라미터는 정렬 벡터로부터 구하며, 식 (7)과 같다.
여기서 ( • )는 벡터의 인덱스이다. 국부 마스크의 잡음 밀도가 높은 경우, 식 (7)의 값이 0 또는 255의 값을 갖는다.
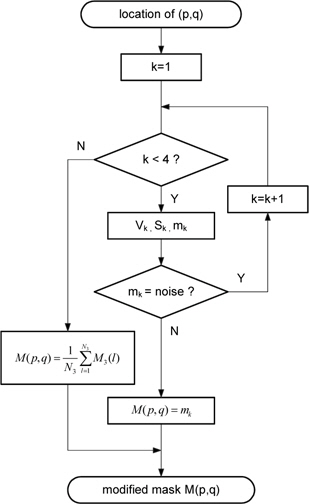
(p,q)를 중심으로 하는 변형된 마스크의 요소는 그림 2와 같이 구한다.
그림 2에서 변형된 마스크 요소는
step 1.
step 2.
step 3.
변형된 마스크
여기서
최종 에지는 정렬 벡터
여기서
최종 에지는 식 (8) 및 (9)로부터 식 (10)과 같이 정의한다.
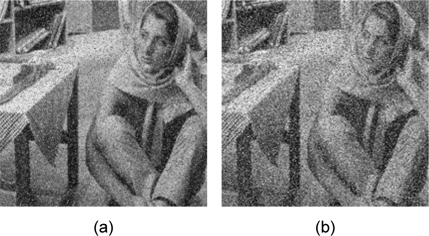
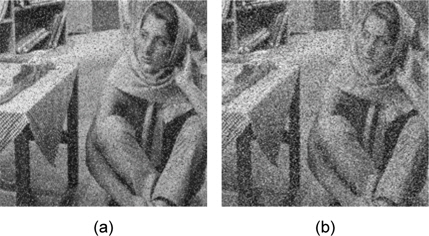
본 논문에서는 salt and pepper 잡음 환경에서 에지를 검출하기 위한 알고리즘을 제안하였으며, 알고리즘의 에지 검출 성능을 확인하기 위해, 시험 영상으로 그림 3과 같이 512×512 크기 8비트 그레이레벨의 Barbara 영상에 잡음 밀도가 15% 및 30%인 salt and pepper 잡음을 첨가하여 시뮬레이션하였다.
일반적으로 에지 검출의 정량적 평가 방법은 PSNR(peak signal to noise ratio), PFOM(Pratt's figure of merit) 방법 등이 있으며, 이러한 방법들은 시험 영상에 대한 이상적인 에지가 필요하다. 그러나 일반적인 영상에서 이상적인 에지를 획득하는 것은 다소 불가하다[6]. 따라서 본 논문에서는 처리 영상과 그레이레벨을 사용하여 기존의 방법과 성능을 비교하였다. 여기서 제안한 방법은 계수
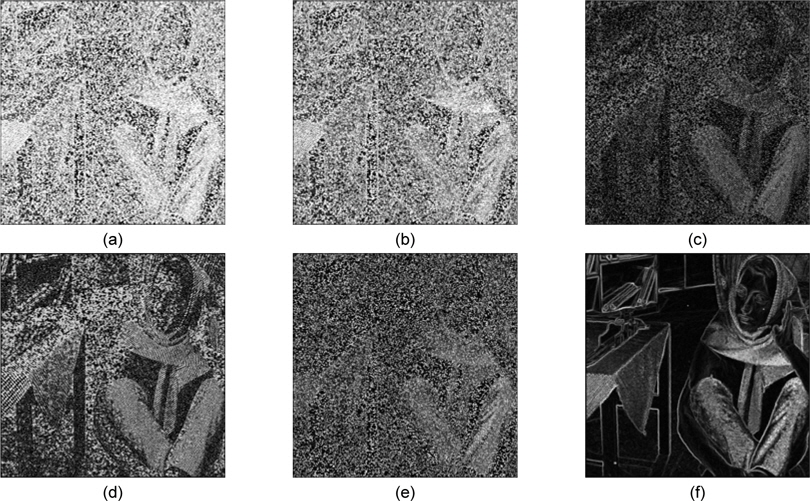
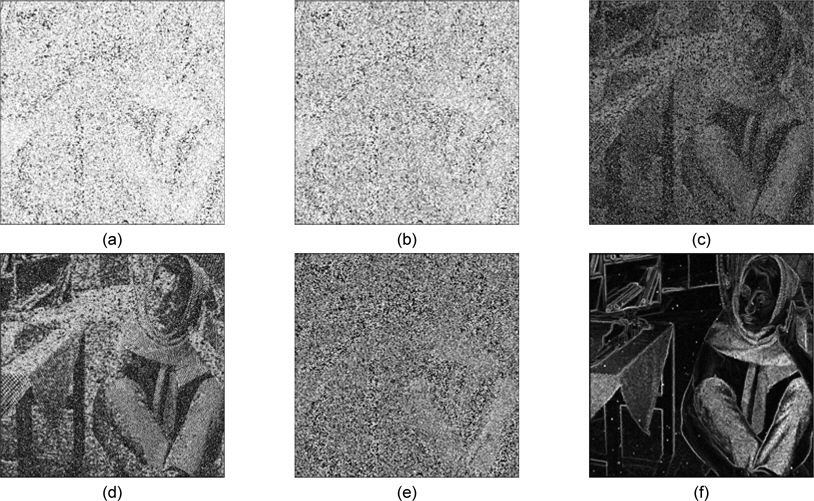
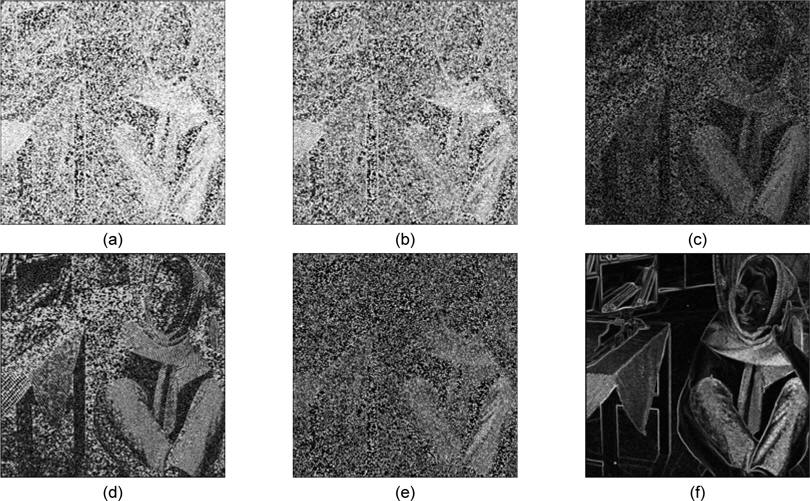
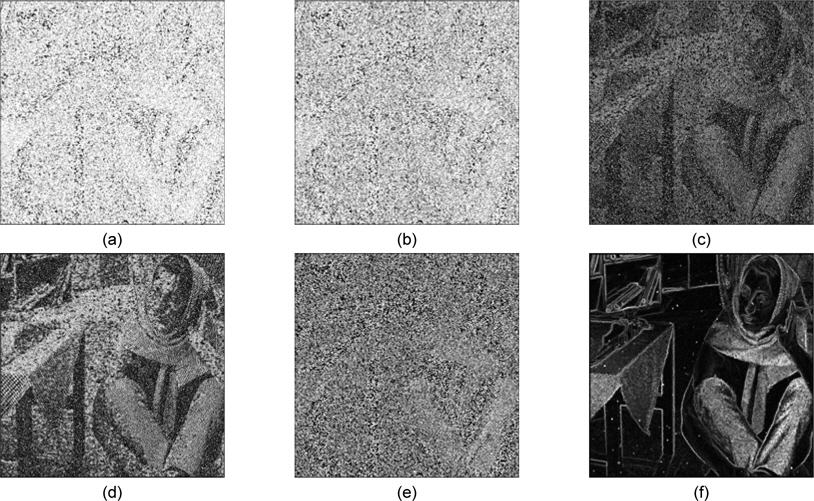
그림 4는 잡음 밀도 15%에 훼손된 Barbara 영상에 대한 시뮬레이션 결과이며, 그림 4 (a)는 Sobel에 의한 결과로서, 에지 검출 특성은 우수하나, 잡음 제거 특성이 다소 미흡하였다. 그림 4 (b)는 Prewitt에 의한 결과로서, Sobel에 비해 잡음 제거 특성은 우수하였으나, 에지 검출 특성은 미흡하였다. 그림 4 (c)는 Laplacian에 의한 결과로서, 잡음 제거 특성 및 에지 검출 특성 모두 미흡한 결과를 나타내었다. 그림 4 (d)는 LoG에 의한 결과로서, 일부 영역에서 에지를 우수한 특성으로 검출하였으나, 잡음 제거 특성이 다소 미흡함을 나타내었다. 그림 4 (e)는 Roberts에 의한 결과로서, 잡음 제거 및 에지 검출 특성 모두 미흡한 결과를 나타내었다. 그리고 그림 4 (f)는 제안한 변형된 마스크를 적용한 알고리즘에 의한 결과이다. 그 결과, 잡음 제거 및 에지 검출 특성 모두 우수한 결과를 나타내었다.
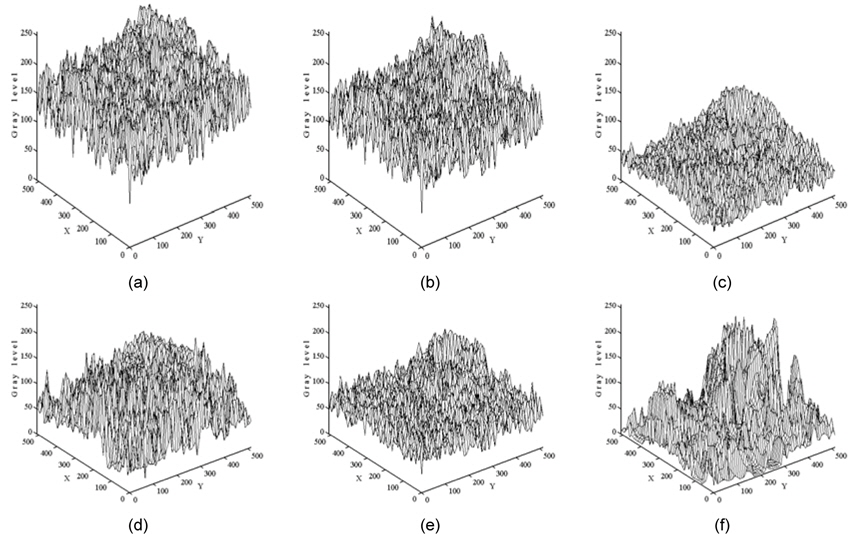
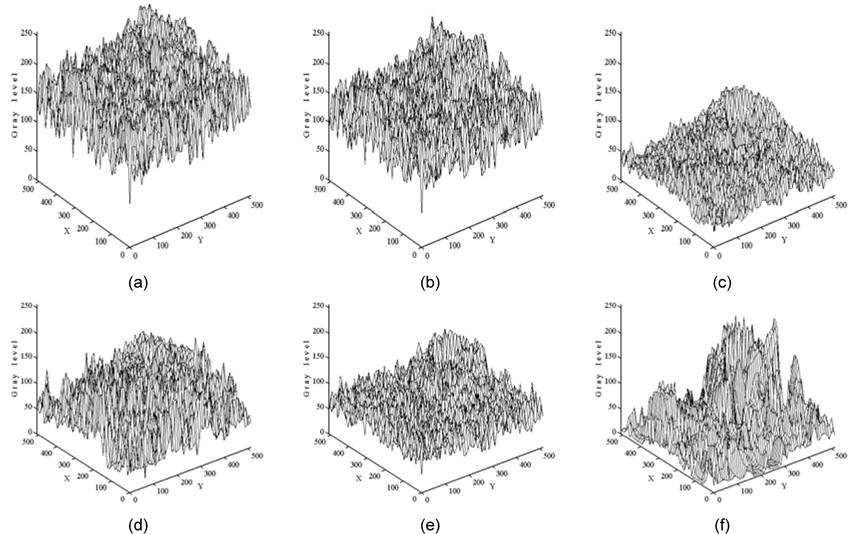
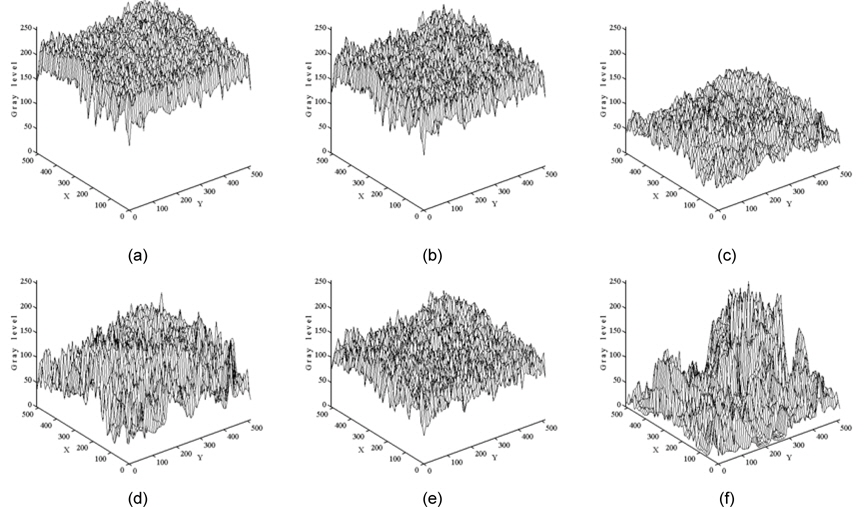
그림 5는 잡음 밀도 15%에 훼손된 Barbara 영상에 대한 에지 검출 결과의 그레이레벨이며, 그림 5 (a), (b), (c)는 Sobel, Prewitt, Laplacian에 의해 처리된 결과이고, 그림 5 (d), (e), (f)는 LoG, Roberts, 그리고 제안한 알고리즘에 의해 처리된 결과이다. 그 결과, 제안한 알고리즘은 잡음 제거 및 에지 검출 특성이 우수하였다.
그림 6은 잡음 밀도 30%에 훼손된 Barbara 영상에 대한 에지 검출 결과 영상이며, 그림 6 (a)와 (b)는 각각 Sobel, Prewitt에 의한 결과로서, 잡음 제거 특성과 에지 검출 특성이 미흡하였다. 그림 6 (c), (d), (e)는 각각 Laplacian, LoG, Roberts에 의한 결과로서, 잡음 밀도 15%의 경우와 유사한 결과를 나타내었다. 그리고 그림 6 (f)는 제안한 변형된 마스크를 적용한 알고리즘에 의한 결과이다. 그 결과, 잡음 제거 특성 및 에지 검출 특성이 우수하였다.
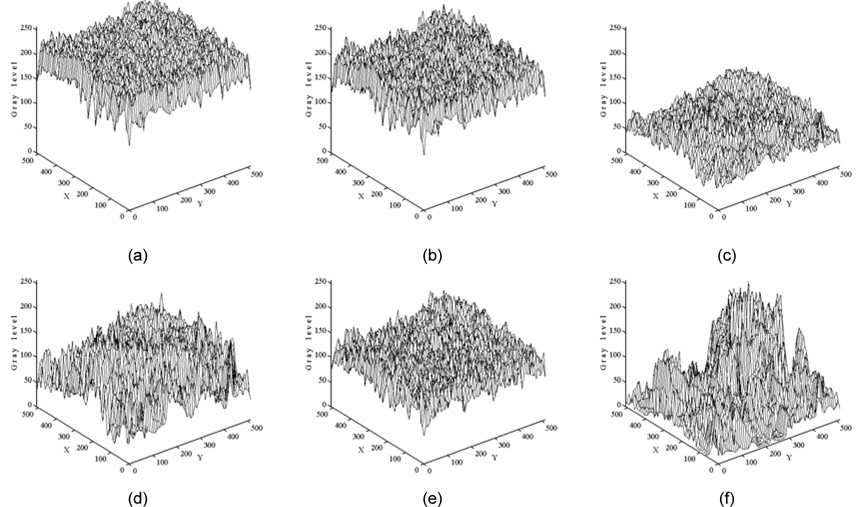
그림 7은 잡음 밀도 30%에 훼손된 Barbara 영상에 대한 각 알고리즘의 에지 검출 결과의 그레이레벨이며, 제안한 방법은 기존의 방법들보다 우수하였다.
본 논문에서는 salt and pepper 잡음환경에서 에지 검출을 위하여, 잡음 밀도에 따라 처리 마스크의 크기를 다르게 적용하여 새로운 화소를 추정하는 알고리즘을 제안하였다.
시뮬레이션 결과, 기존의 방법들은 잡음 환경에서 잡음 제거 및 에지 검출 특성이 다소 미흡하였으며, 본 논문에서 제안한 방법은 잡음 환경에서 영상의 잡음 밀도에 따라 처리 마스크를 다르게 적용하고, 정렬 벡터와 가중치 벡터에 의해 최종 에지를 결정함에 따라 우수한 잡음 제거 및 에지 검출 특성을 나타내었다.
따라서 제안한 알고리즘은 salt and pepper 잡음에 훼손된 에지 검출 응용분야에 적용될 것으로 사료된다.