A symplectic integration method is a numerical method for solving Hamiltonian equations,
a special class of differential equations related to classical mechanics and symplectic geometry. Various symplectic methods are designed and widely used in celestial mechanics, molecular dynamics, electromagnetic field analysis, etc., particularly for the longterm integration of Hamiltonian equations.
The time evolution of Hamiltonian equations preserves a special differential 2-form
On the other hand, the numerical stability of symplectic methods has received little attention, although it is also related to long-term integration; only a few papers [7, 8] deal with this subject. It is certain that many outstanding symplectic methods are implicit and possess originally superior stability. However, in a large-scale computation, e.g., in the solution of partial differential equations, explicit methods are still effective tools. A study of their stability has significance for practical computation because the stability of numerical methods is closely related to step size restrictions, such as a Courant-Friedrichs-Lewy (CFL) condition for hyperbolic equations.
In this paper, we study the stability of an explicit symplectic method by using the harmonic oscillator as a test equation, following [8]. An outline of this paper is as follows: In Section II, we describe the fundamental concept and notation concerning explicit symplectic methods and their numerical stability. In Section III, we propose a new stability criterion for the symplectic methods and discuss the stability of the basic methods on the basis of this criterion. In Section IV, we continue to analyze more advanced methods and derive a new method, which is tested through a numerical experiment with the sine-Gordon equation, a nonlinear wave equa-tion in Section V.
>
A. Explicit Symplectic Methods
We consider a Hamiltonian of the special form
and the initial value problem
for the corresponding Hamiltonian equation, where
In mechanics,
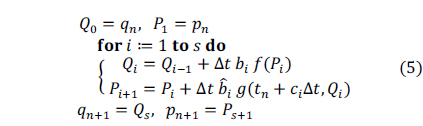
In general, symplectic methods are implicit; i.e., it is necessary to solve nonlinear equations for the implementation of these methods. For problem (3), there are explicit symplectic methods by virtue of the special form (2). A well-known instance is a symplectic partitioned Runge-Kutta method, whose general form is as follows (see, e.g., [2, 4]):
Here, Δ
>
B. Test Equation for Stability Analysis
To study the stability of the symplectic method (5), we adopt the harmonic oscillator
as a test equation ([8]; see also [7] for another test equation). This is a Hamiltonian equation with the Hamiltonian
as a basic parameter for the stability analysis. Upon the restriction of the frequency ω ≥ 0, the range of the parameter is
It should be noted that exact solutions to (6) satisfy
The matrix
In the case
The substitution of the first equation into the second equation gives Hence, (9) is rewritten as
and application of method (5) to test equation (6) yields an analogue to (8),
It is clear that det
and the eigen values are given by
where tr
If │tr
with some nonsingular matrix
and │λ│=││ = 1, we have ║
Theorem 1. Let
for any integer
The proof of the theorem is obtained by a simple but tiresome computation. We omit the proof (cf. the proof of Theorem 3.1 in [9]). As shown below,
In the case
This is called the symplectic Euler method and is of the order 1 in accuracy. In the case of the symplectic Euler method, we have
Since tr
In the case
which is of the order 2 if the parameters satisfy
In particular, the parameter values
satisfy the condition, and the corresponding method is known as the Störmer - Verlet method [4, 8].
For this method, we have
Since tr
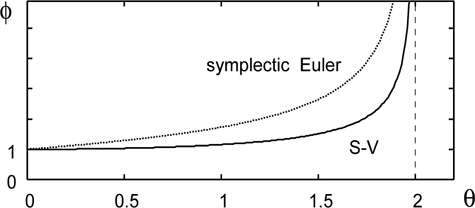
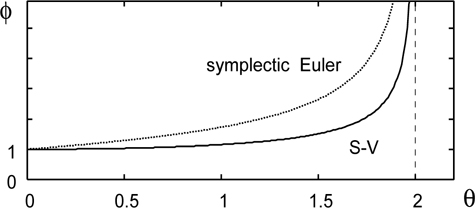
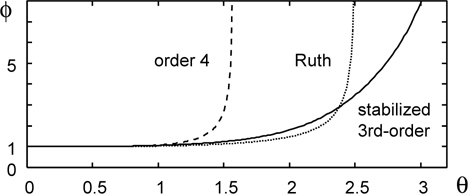
Fig. 1 shows the functions
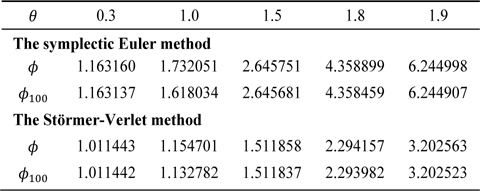
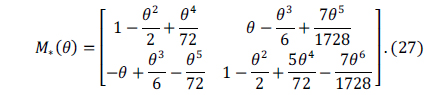
Table 1 presents
[Table 1.] Comparison between ? and ? = max 0≤n≤100?M*(θ)n?
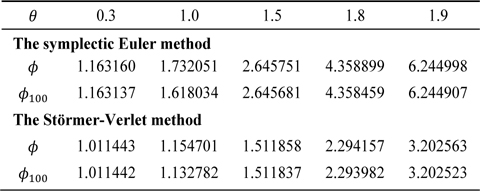
Comparison between ? and ? = max 0≤n≤100?M*(θ)n?
IV. STABILITY OF METHODS OF ORDER 3 AND ORDER 4
Method (5) for
is called Ruth’s method, which is of the order 3 in accuracy. For Ruth’s method, we have
The stability interval is ≈2.50748 where denotes a root of tr
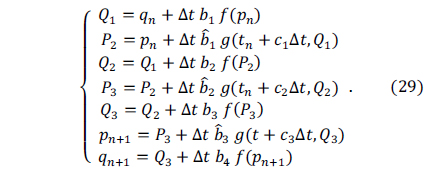
To try to improve Ruth’s method with respect to stability, we consider (5) for
At first glance, it appears that (29) needs more evaluation of
Method (29) is of the order 3 if the parameters satisfy
These are too complicated to treat. We thus introduce the simplifying condition
By virtue of this condition, the coefficient of
The stability interval becomes which is larger than that of Ruth’s method.
Eqs. (30) and (31) form a system of 6 equations with 7 unknown variables, which has solutions with a free parameter, e.g.,
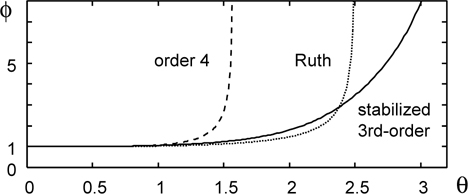
We refer to the corresponding method as the stabilized 3rd-order method. In Fig. 2, the functions
Several symplectic methods of the order 4 are known. Among them, a method of the form (29) corresponding to the parameter values (see, e.g., [4], p. 109)
For this method, we have the following:
The stability interval is ≈ 1.57340, where is a root of tr
To test our numerical method, we consider the sine- Gordon equation
This equation has the solitary wave solution (see, e.g., [10], chapter 17).
By introducing a new variable
where
where
The matrix
By using a linear transform, we change the linear part of (40) into equations of the form
Since
which gives,
We now consider time step sizes of the form Δ
Table 2 shows the errors
for
[Table 2.] Numerical results by the stabilized 3rd-order method

Numerical results by the stabilized 3rd-order method