Borehole radar systems have been widely used for anomaly detection and geophysical exploration in deep subsurface [1,2]. In a single borehole, a bistatic borehole radar may detect underground targets in any direction but it requires a sufficiently long separation to reduce direct coupling between the transmitting and receiving antennas. One alternative configuration could be a monostatic borehole radar with a single antenna and an embedded transceiver module. For a pulsetype monostatic borehole radar, target signatures within B-scan data may be obscured by two clutters with different orientation and intensity. As dominant components, primary clutters are caused by internal ringing between the antenna and the transceiver module in the radar and are distributed as a nearly constant time delay in the data. Secondary clutters result from cable-guided borehole waves and give rise to obliquely time-delayed patterns in the data. Generally, conventional clutter reduction techniques are based on the row and column data organization, and the primary clutters can be easily removed from the raw data [2-5]. However, the secondary clutters with different orientations still remain in the data. This letter provides a solution to this problem by proposing a clutter-orientation-based adaptive filtering technique. This filtering technique consists of a combination of edge detection, data rotation, and eigenimage filtering. We show that use of this technique with real B-scan data can remove both primary and secondary clutters, and provides sufficient enhancement of the target signatures.
Ⅱ. ADAPTIVE FILTERING PROCESSING TECHNIQUE IN MONOSTATIC BOREHOLE RADAR DATA
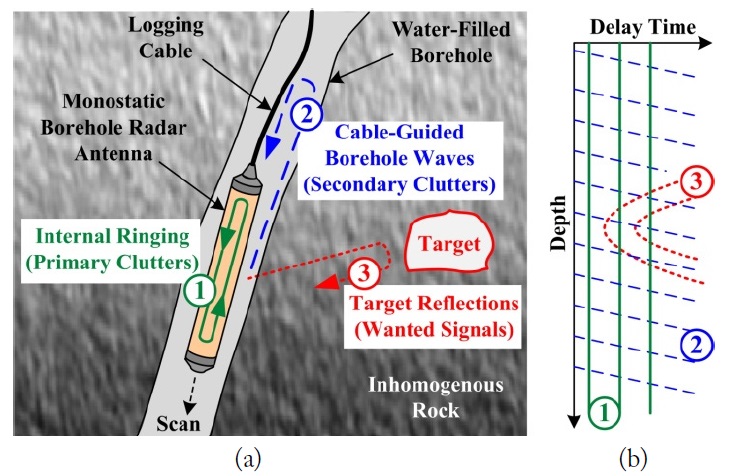
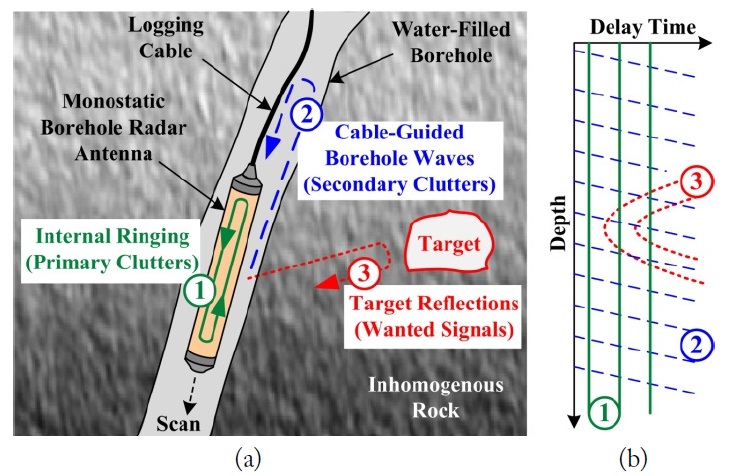
In monostatic borehole radar data, the received electro-magnetic waves consist of primary clutters caused by internal ringing reflections from both the antenna and the transceiver module, and secondary clutters due to cable-guided borehole wave reflections and target reflections, as shown in Fig. 1. In the case of a pulse-type monostatic borehole radar, primary and secondary clutters have constant and obliquely time-delayed patterns, respectively, as shown in Fig. 1(b). Clutter echoes are greater than localized target echoes, so the hyperbolic signatures of the targets are seriously obscured by these clutters. Thus, many publications describe how clutter reduction and target signature enhancement both present challenges for the development of additional signal processing techniques [2-5]. As shown in Fig. 1, we use the different properties of the two clutters and target signatures as a basis for clutter-orientation-based adaptive filtering.
First, an orientation angle of clutters may be determined by employing edge detection techniques in digital image processing. Second, the B-scan data are rotated by means of the orientation angle. We use standard left-handed 2-D Cartesian coordinates, and employ a delay time

where

where

where

Finally, through re-rotation of Eqs. (3) and (4), clutters and target signatures can be extracted from the B-scan data. In the case of
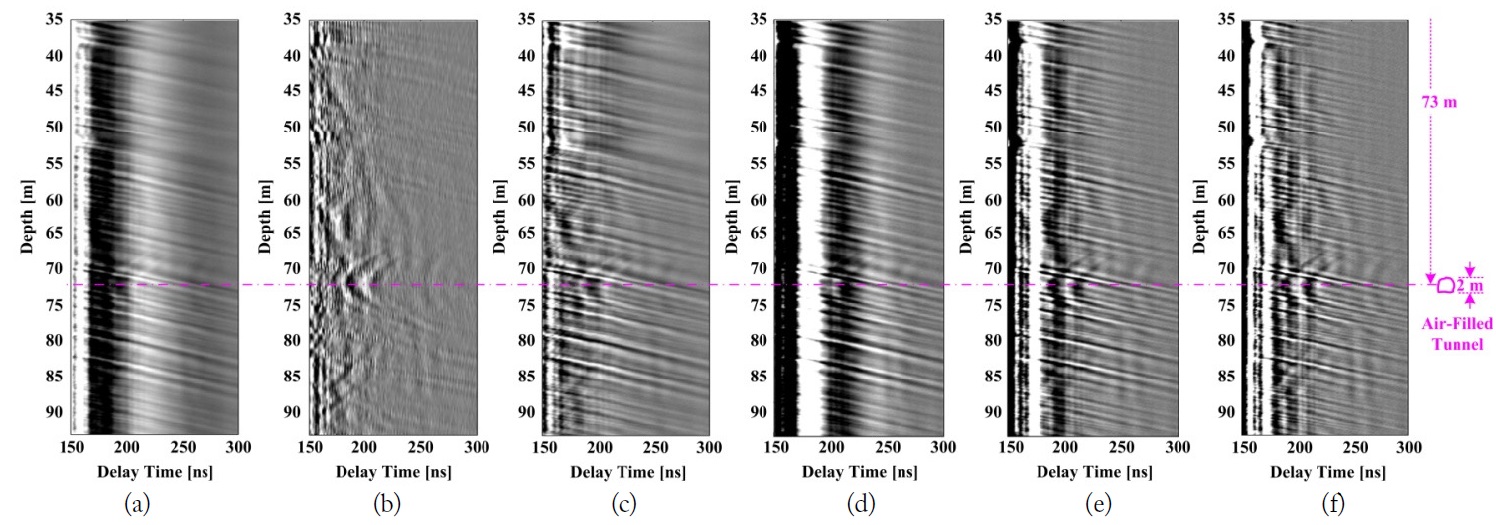
Fig. 2(a) shows the B-scan data measured in a well-suited test site for air-filled tunnel detection using a self-designed monostatic borehole radar system. Up to about 250 ns, constant time-delayed patterns result from primary clutters. Throughout the depth range, obliquely time-delayed patterns are widely distributed as secondary clutters. The hyperbolic signatures of the tunnel target are seriously obscured by both clutters.
For validation, we applied the proposed filtering technique to the raw data in Fig. 2(a). As shown in Fig. 2(b), the hyperbolas of the tunnel target at a depth of 73 m are clearly seen. This means that the proposed filtering provides target signature enhancement as well as sufficient reduction of both primary and secondary clutters. For comparison with existing approaches, we also apply background removal filtering [2,5] and high-pass filtering [2] to the raw data. As shown in Fig. 2(c)-(f), although the target signatures are slightly visible at the depth of 73 m, these signatures are seriously blurred by primary and secondary clutters. Thus, when compared with existing approaches, the proposed technique provides sufficient clutter reduction and target signature enhancement.
The B-scan data of our pulse-type monostatic borehole radar were subjected to adaptive filtering processing for clutter reduction and target signature enhancement. The B-scan raw data measured in a well-suited test site for air-filled tunnel detection showed that the hyperbolic signatures of a tunnel target are severely obscured by two clutters with different orientations. The clutters are caused by internal ringing and cable-guided borehole waves. The differences in orientation and intensity properties between two clutters become the basis for clutter-orientation-based adaptive filtering. We show that both clutter reduction and target signature enhancement can be achieved through the proposed adaptive filtering.

![Comparison results. (a) Raw data, (b) proposed adaptive filtering, and conventional approaches, such as (c) background removal filtering [2,5], and high-pass filtering [2] with cutoff frequencies of (d) 20MHz, (e) 30MHz and (f) 40MHz.](http://oak.go.kr/repository/journal/13109/E1ELAT_2014_v14n2_79_f0003.jpg)