The demand for ubiquitous healthcare is growing with rising medical costs incurred by the burgeoning elderly population [1].
The elderly, especially those above the age of 65 years, suffer falls owing to the deterioration of their physical functions. In Korea, 17.2% of the elderly above age 65 have suffered a fall at least once a year, and 23.7% of these have suffered a fall more than three times [2]. An emergency resulting from a fall-induced injury requires a rapid response. If the emergency response is not quick when an elderly person falls and becomes unconscious or is unable to move his/her body, he/she may succumb to any injuries that might have been caused by the fall [3]. Further, elderly persons who have experienced a fall could develop a fear of falling, leading to psychological anxiety and reduction in mobility, which causes balance, gait, and cognition disorders [4]. Thus, falls and the fear of falling are important issues that need to be tackled while monitoring the health of the elderly.
An emergency monitoring system is required to automatically detect a fall and to send an emergency alarm to the caregiver or the nearest healthcare center. The system for requesting emergency assistance can reduce the duration in which an elderly person remains unattended. Various types of emergency alarm systems have been reported [5-12]. The personal emergency response system (PERS) is a button that can be pushed to contact the emergency center by using wireless communication [5]. It has been found that the PERS was not used after most falls because of physical incapability or conscious unwillingness.
Various approaches to automatic fall detection by using accelerometers or gyroscopes have been proposed in recent years [6-15]. Automatic fall detection using a threshold-based method of single parameters, which are calculated using acceleration measured by an accelerometer, has a high sensitivity (about 100%), but relatively low specificity [6-10]. Automatic fall detection using multiple parameter combinations has a relatively high sensitivity (85.7%) and specificity (90.1%) [11]. Automatic fall detection using angular velocities measured by a gyroscope also have high sensitivity (100%) and specificity (97.5%) [12]. Further, automatic fall detection using multiple parameters, which are calculated using the acceleration and angular velocities measured by an accelerometer and a gyroscope, respectively, have high sensitivity (91%) and specificity (92%) [13]. However, because the reported fall detection algorithms do not have the desired sensitivity and specificity of 100%, further development of advanced fall detection algorithms is required.
Automated fall detectors have been developed to ensure the independence and safety of the elderly. Most reported fall detection applications are prototypes or applications for research purposes [6-13] and commercial interests [14,15]. However, even though falls are detected by the reported fall detection systems, the situation may not be an emergency and the fall may not cause any severe injury. Therefore, an algorithm is required to send an emergency alarm to the healthcare center in the case of an emergency when an elderly person falls.
In this paper, we propose an emergency monitoring system with a sensor node for detecting falls and resulting emergencies for the elderly, based on a newly developed fall detection algorithm. The sensor node consists of a ZigBee network processor chip (CC2530, Texas Instruments) and three types of sensors―an electrocardiogram (ECG), an accelerometer, and a gyroscope. The fall detection algorithm, which uses multiple parameter combinations calculated using the acceleration and angular velocity, is proposed. Further, we propose an emergency detection algorithm that monitors the movements and heart rate (HR) of the fallen elderly person, after the fall is detected. Various types of falls and activities of daily living (ADL) have been inve-stigated with the proposed system for attaining the required sensitivity and specificity.
A novel algorithm for monitoring an emergency situation based on falls using a sensor node is presented. The sensor node measures the acceleration, angular velocity, and HR with a tri-axial accelerometer, a bi-axial gyroscope, and ECG, respectively.
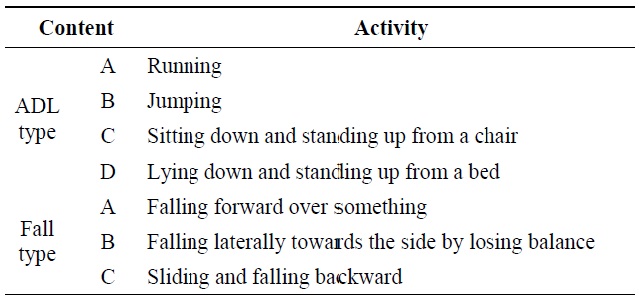
[Table 1.] Test falls and activities of daily livings (ADLs) used in the study
Test falls and activities of daily livings (ADLs) used in the study
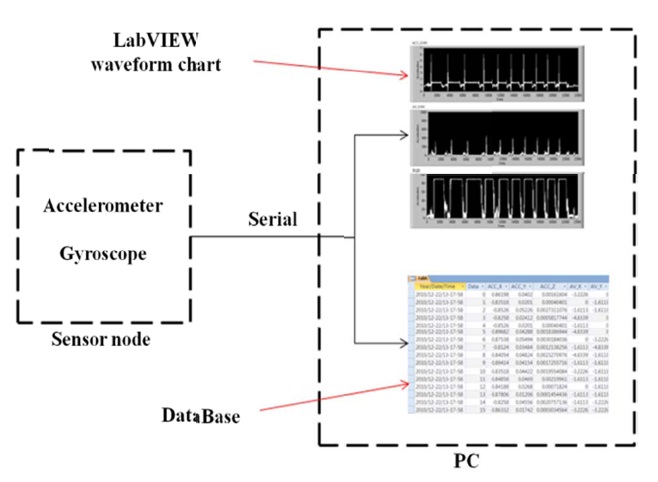
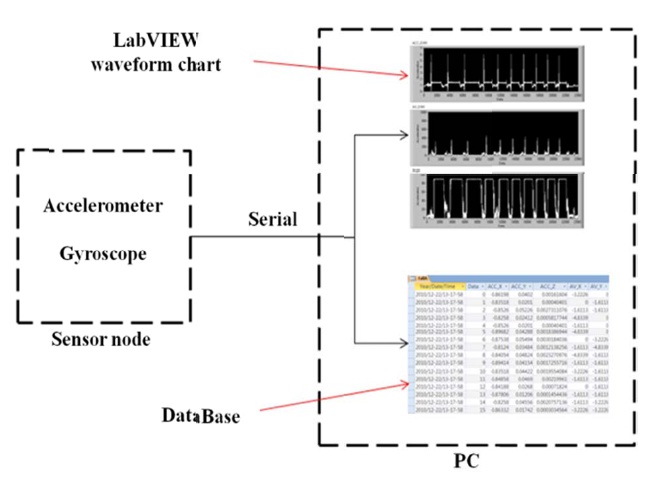
The sensor node is attached with an elastic belt at the chest. The sensor node, as shown in Fig. 1, measures sensors’ data and sends them to the gateway (personal computer [PC]) by a ZigBee network processor. Emergency alarm simulation based on the fall detection algorithm is done in a virtual environment with a custom-made Lab-VIEW program [16].
>
A. Subjects and Testing Activities
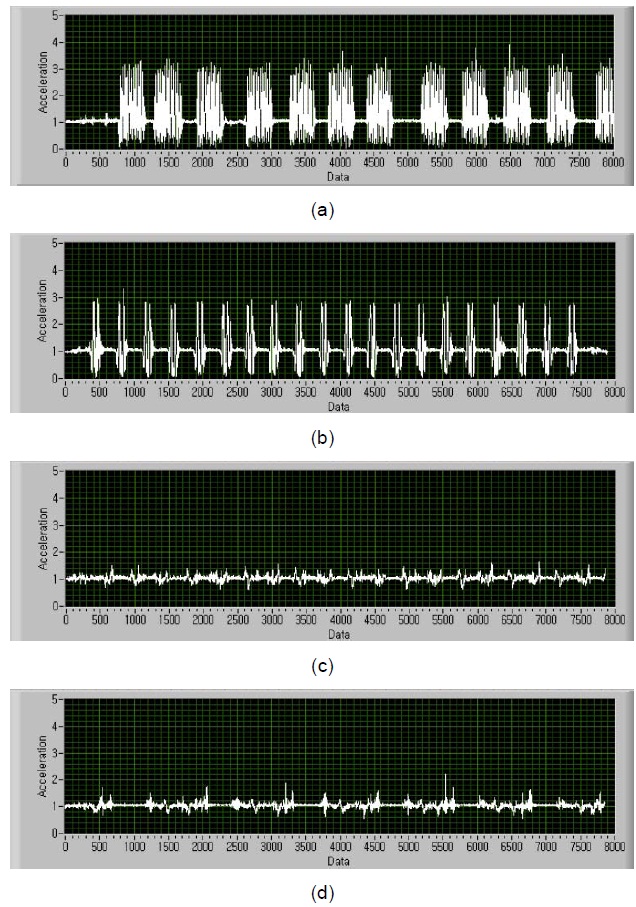
Intentional falls were performed by three healthy volun-teers: three male subjects whose ages ranged from 25 to 28 years; height, from 170 to 175 cm; and weight, from 68 to 80 kg. The falls were performed using a mattress (thickness, 20 cm). Each subject performed three types of falls and four types of ADLs, as listed in Table 1. A total of 201 ADLs and 152 falls were tested. The ADLs used in this study were the activities that may have caused high impact or abrupt changes in a person’s movement―and thus possibly resulted in a false alarm being triggered by the threshold-based fall detection algorithm [7,12].
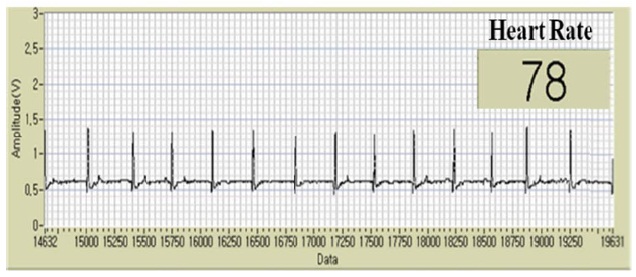
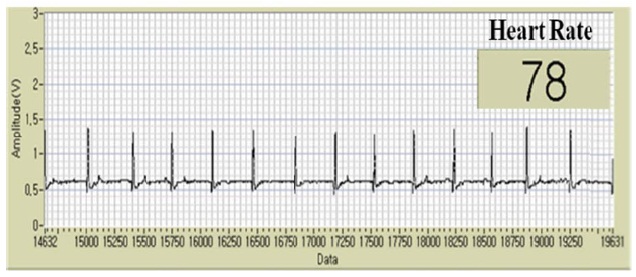
The ECG sensor is used for measuring the HR and consists of three commercial electrodes, an analog front end―including an instrument amplifier (AD620; Analog Devices, Norwood, MA, USA) and an anti-aliasing filter, and a digital signal processing part―that uses a 16-bit microcontroller (dsPIC30F3012; Microchip Technology Inc., Chandler, AZ, USA). The analog front end amplifies the raw signals from the three electrodes, restores the variation caused in the DC components by using an analog integrator, and low-pass filters the raw signals with a cut-off frequency of 250 Hz by using an anti-alias filter. The variation in the DC components is caused by the variation in the contact resistances between the electrodes and skin. The dsPIC30F3012 (Microchip Technology Inc.) samples the output analog signals from the analog front end to 12-bit digital signals and samples the raw signals with 1 kHz in this system. It also filters the digitally sampled signals using a designed infinite impulse-response band-pass filter in the frequency range 6 to 30 Hz. To develop the algorithm for calculating the HR, the sensing data are transmitted to the gateway that monitors the ECG data and calculates the HR using LabVIEW, as shown in Fig. 2. The HR is calculated from the R-R interval measured from the ECG sensor [17].
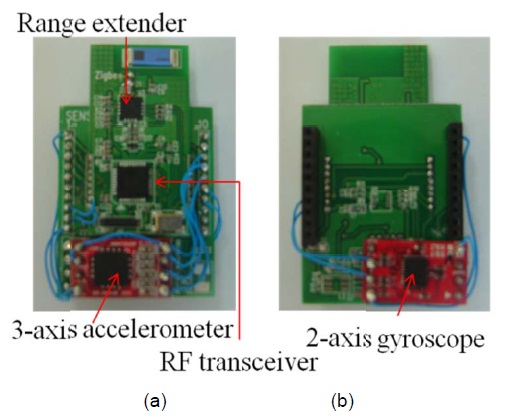
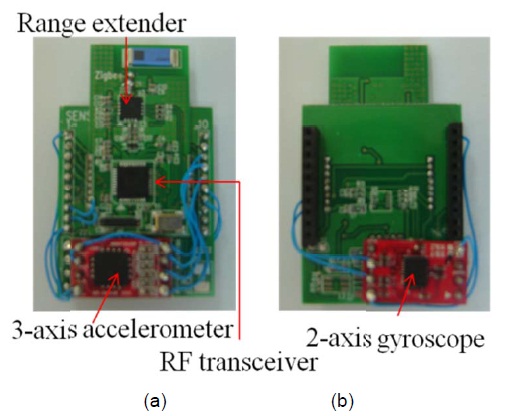
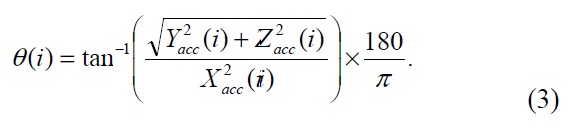
Falls suffered by the elderly vary in terms of acceleration and angular velocity. The fall detection sensor consists of a ±6 g tri-axial accelerometer (MMA7260; Freescale Semiconductor, Austin, TX, USA) and a ±2,000°/s bi-axial gyroscope (IDG-650; InvenSense, San Jose, CA, USA), as shown in Fig. 3. The sensor is controlled by the ZigBee network processor. The sampling rate is set to 100 Hz, a bandwidth exceeding the characteristic response of human movement. Each tri-axial acceleration and bi-axial angular velocity was statistically calibrated in order to correct any possible axis tilt due to the orientation of the device on the subject or due to lower back tilt of the subject [18]. To develop the algorithm that detects falls suffered by an elderly person, the gateway monitors the accelerations and angular velocities sent from the sensor nodes and calculates several parameters such as the directions, magnitude, and angles of the elderly person’s motion from the sensing data using LabVIEW in real-time, and stores the measured data and calculated parameters in an MS Access database, as shown in Fig. 1.
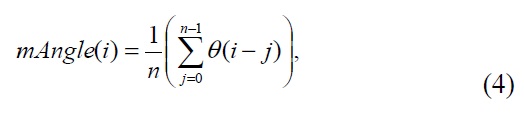
To detect a fall and an emergency, five types of parameters are used in the analyses. Three different parameters―


where
where


where
>
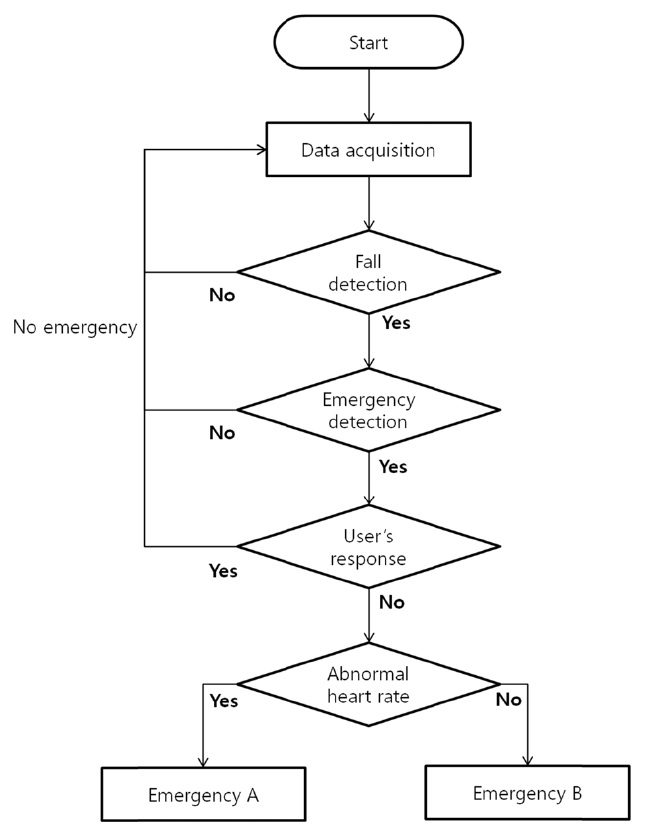
D. Emergency Alarm Algorithm
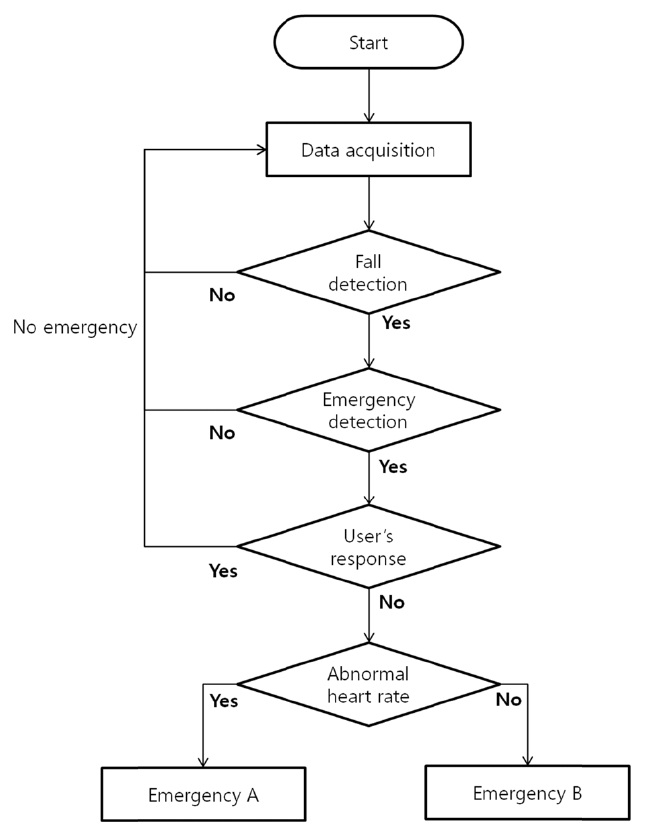
When an elderly person falls, he/she may become unconscious or may be unable to move his/her body. There-fore, accurate emergency detection after detecting a fall is needed. The emergency alarm algorithm is shown in Fig. 4. First, the accelerations, angular velocities, and ECGs are measured and the parameters are calculated. Second, the fall detection algorithm, as shown in Table 2, is applied to detect a fall.
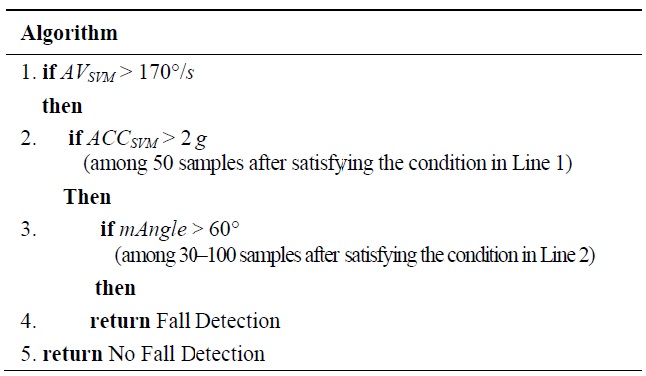
[Table 2.] Fall detection algorithm
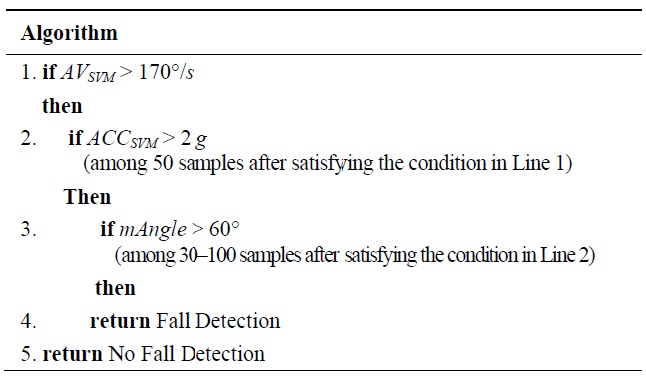
Fall detection algorithm
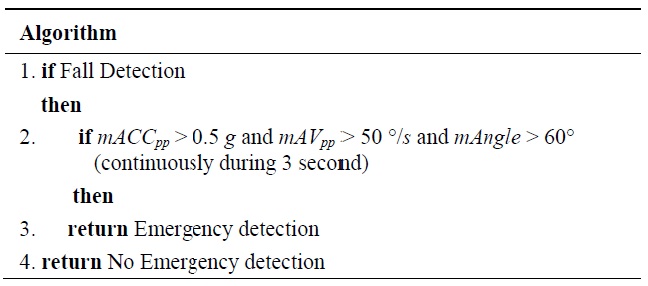
[Table 3.] Emergency detection algorithm
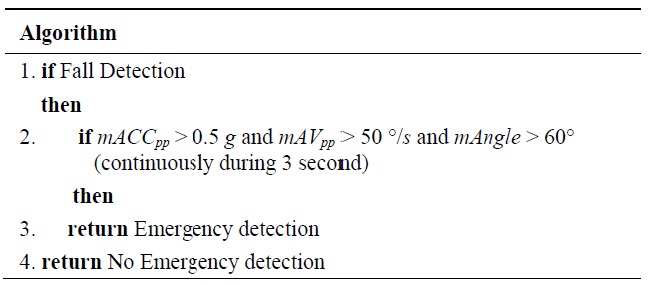
Emergency detection algorithm
Third, if a fall is detected, the emergency detection algorithm, as shown in Table 3, is applied to detect any emergency in which the faller may be unconscious or unable to move. Fourth, if an emergency is detected, the gateway addresses the elderly person by using a voice message to clarify whether he/she needs emergency assistance. If there is no response, two types of emergency alarms (A or B) are sent to the healthcare center or caregivers. According to the HR obtained, either emergency signal A, for an abnormal HR, or emergency signal B, for a normal HR, is sent.
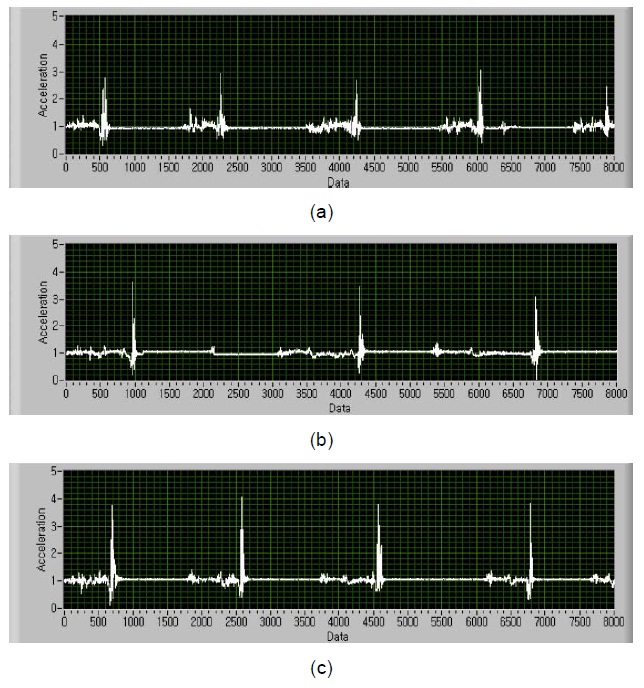
For each parameter, the best threshold for discriminating between normal gait and falls is determined by plotting the range of possible thresholds of the parameters using the receiver operating characteristic curve [7,12]. Figs. 5 and 6 show the
Therefore, ADL-A, -B, and -C can be discriminated from falls by using
Because the acceleration and angular velocity during a fall do not vary synchronously, sometime interval (or sche-duling) is needed to sense them. A fall detection algorithm using multiple parameter combinations with time scheduling is proposed, as shown in Table 2:
Line 1: Check whether the condition AVSVM > 170°/s is satisfied.
Line 2: Check whether the condition ACCSVM > 2 g is satisfied among the next 50 samples if the con-dition in Line 1 is satisfied.
Line 3: Check whether the condition mAngle > 60° is satisfied among the next 30?50 samples if the condition in Line 2 is satisfied.
Line 4: Alarm fall detection, if the condition in Line 3 is satisfied.
Here, Lines 2 and 3 are the cases where time scheduling is applied.
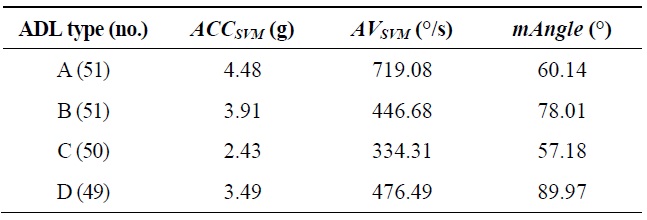
[Table 4.] Maximum values of parameters measured at four types of activities of daily livings (ADLs)
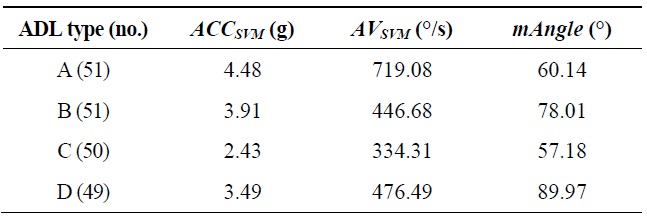
Maximum values of parameters measured at four types of activities of daily livings (ADLs)
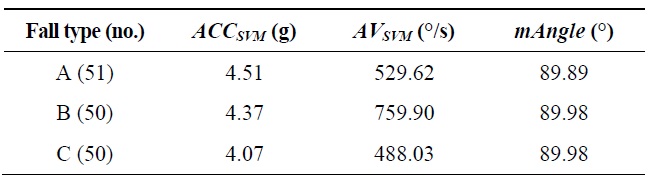
[Table 5.] Maximum values of parameters measured at three types of falls
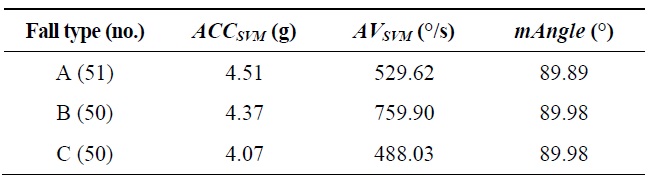
Maximum values of parameters measured at three types of falls
The fall and emergency detection platform was tested with intentional falls and ADL samples (four ADLs and three types of falls), as shown in Table 1.
>
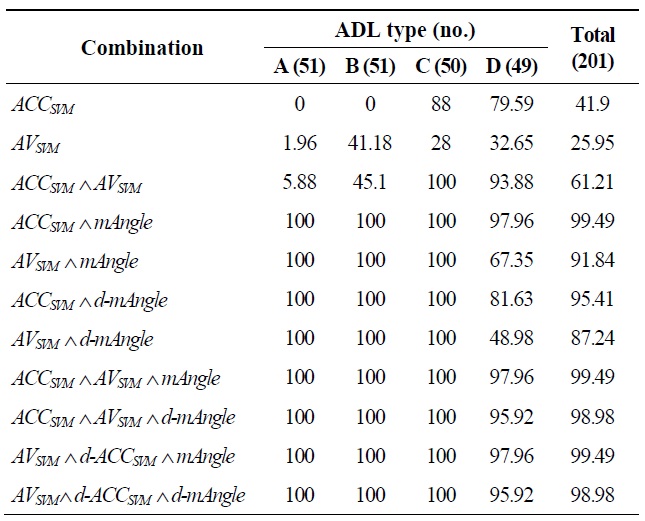
A. Comparison of Multiple Parameter Combinations
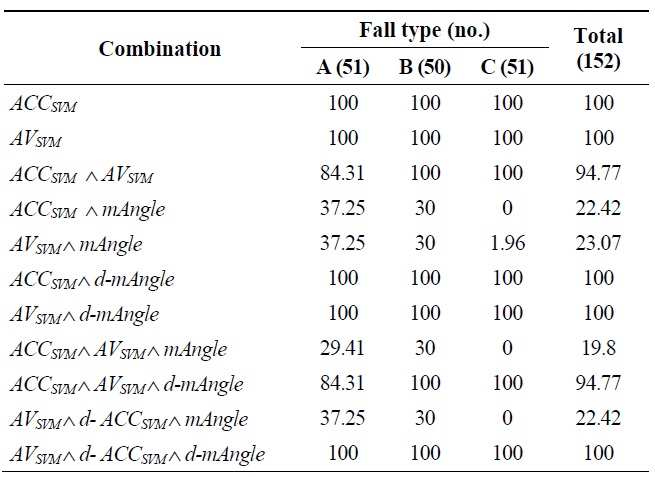
The fall detection sensitivity and specificity of single parameter and multiple parameter combinations of
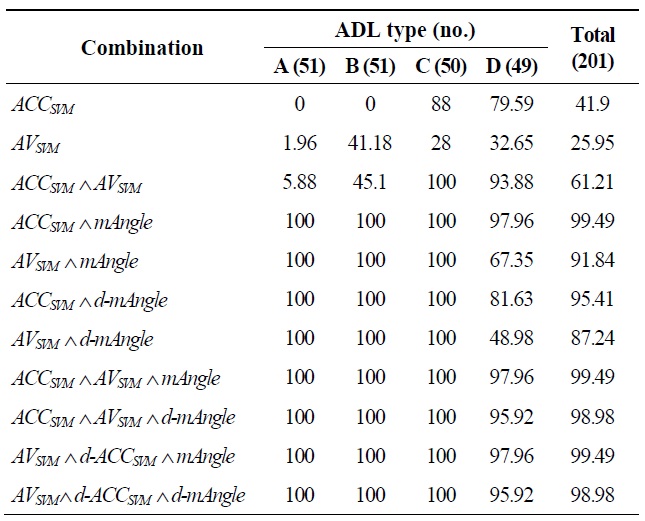
Specificity (%) for detecting activities of daily livings (ADLs) using single parameters and multiple parameter combinations
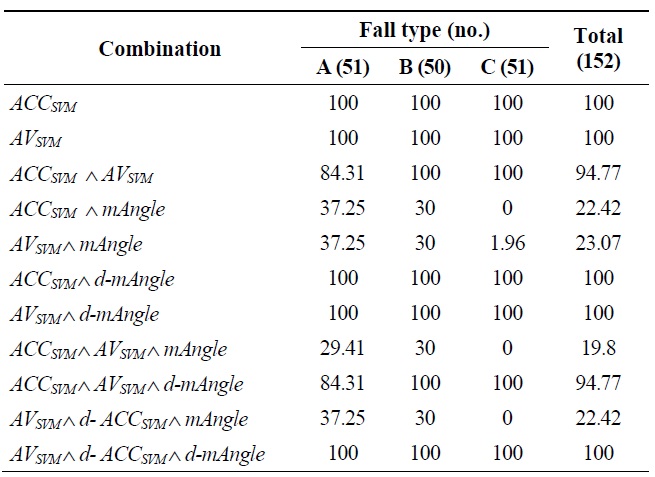
Sensitivity (%) for detecting falls using single parameter and multiple parameter combinations
>
B. Comparison of Fall Detection Algorithms
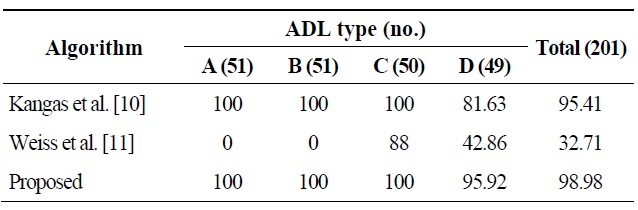
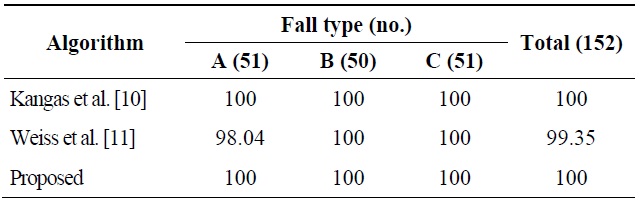
The fall detection algorithm was tested for four types of ADLs and three types of falls, and its performance was compared with that of two different fall detection algorithms proposed by Kangas et al. [10] and Weiss et al. [11], as shown in Tables 8 and 9. The sensitivities of the algorithms proposed by Kangas and Weiss are as high as 100% and 99.35%, respectively, but the specificities are 95.31% and 32.71%, respectively. The specificities of Weiss’ algorithm are very low because it uses only single parameters, but those of Kangas’ algorithm and the proposed algorithm are very high because they use multiple parameter combinations. In ADL-D, the specificity of the proposed algorithm coupled with the accelerometer and the gyroscope is 14% higher than that of Kangas’ algorithm, which uses only the
[Table 8.] Specificity (%) of each algorithm for detecting activities of daily livings (ADLs)
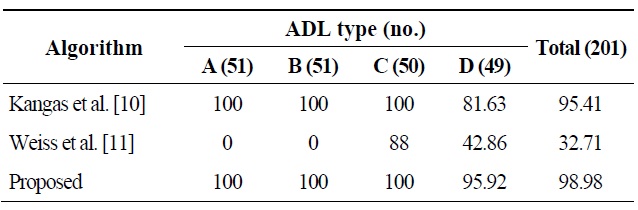
Specificity (%) of each algorithm for detecting activities of daily livings (ADLs)
[Table 9.] Sensitivity (%) of each algorithm for detecting falls
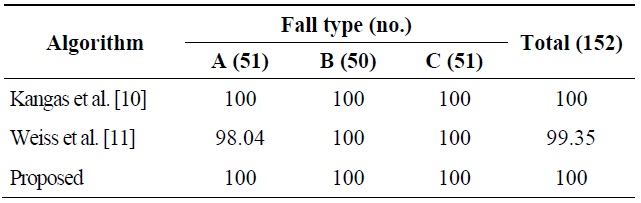
Sensitivity (%) of each algorithm for detecting falls
accelerometer, because moving into a lying posture induces both angular velocity and acceleration.
However, because the test subjects are limited to persons aged 25 to 28 years old in these experiments, elderly per-sons should be tested in the future to obtain the threshold for old persons, and because the threshold may change according to the test subjects, a more effective classifying method such as machine learning, rather than a simple threshold, should be developed.
>
C. Results of the Proposed Emergency Alarm Algorithm
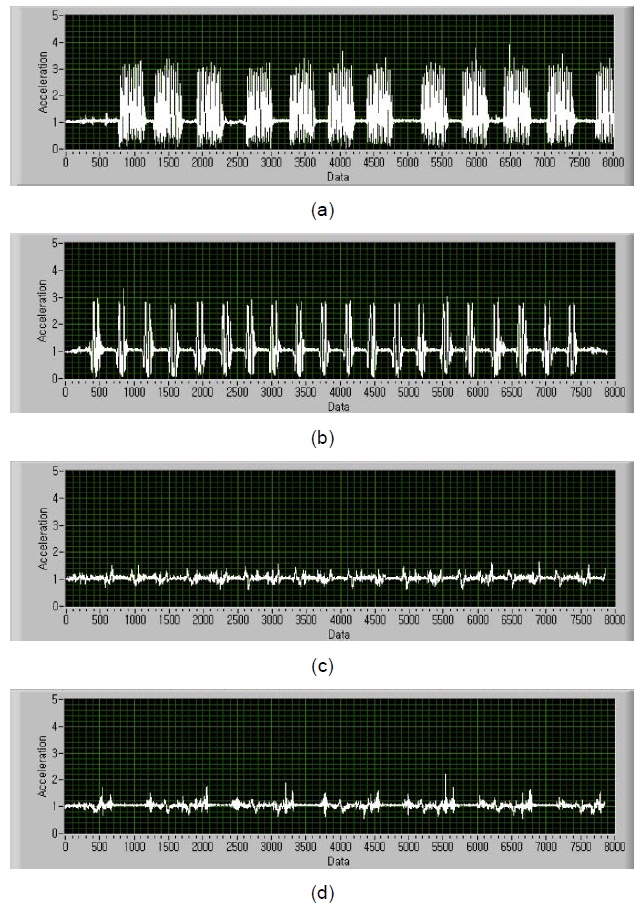
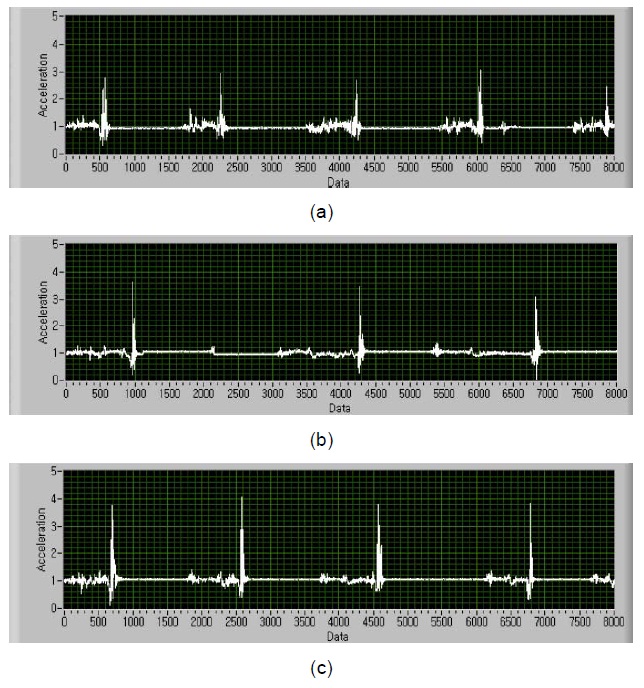
The emergency alarm system was tested with three types of falls. The parameters,
We proposed an emergency monitoring system equipped with a sensor node for detecting falls suffered by the elderly, and the resulting emergencies, using a newly developed fall detection algorithm. The sensor node consisted of a TI CC2530 chip and three types of sensors: an ECG, an acc-elerometer, and a gyroscope. The fall detection algorithm used multiple parameter combinations in which all of the parameters, calculated using accelerations in three directions and angular velocities in two directions, were above a certain threshold within a time period. In addition, we proposed an emergency detection algorithm that monitors the movements of the fallen elderly person after the fall is detected. The results showed that the proposed fall detection algorithm achieved 100% sensitivity and 98.98% specificity and that it could distinguish falls from ADLs. Further, when a fall was detected, the emergency detection sensitivity was 100%, suggesting that the proposed fall and emergency detection system provided an effective automatic fall detection tool and emergency alarm.
One limitation of this study is that the fall detection algorithm was tested on young subjects falling under simulated conditions. Further research is required to test the performance of the proposed algorithm for detecting actual falls suffered by the elderly and to develop a more effective classifying algorithm such as machine learning, rather than a simple threshold method, and to evaluate the power consumption of the fall detection sensor node for testing the power consumption of the proposed fall dete-ction algorithm.