In recent years, multicast services such as high-definition television (HDTV), video conferencing, interactive distance learning, and distributed games have increased exponentially, and wavelength-division multiplexing (WDM) networks are considered to be a promising technology due to their support for multicast applications. Multicast survivability in WDM networks has been the focus of extensive attention since a single-link failure in an optical network may result in a massive loss of data. But the improvement of network survivability increases energy consumption due to more resource allocation for protection.
In this paper, an energy-efficient multicast algorithm (EEMA) is proposed to reduce energy consumption in WDM networks. Two cost functions are defined based on the link state to determine both working and protection paths for a multicast request in WDM networks. To increase the number of sleeping links, the link cost function of the working path aims to integrate new working path into the links with more working paths. Sleeping links indicate the links in sleep mode, which do not have any working path. To increase bandwidth utilization by sharing spare capacity, the cost function of the protection path is defined to use sleeping fibers for establishing new protection paths. Finally, the performance of the proposed algorithm is evaluated in terms of energy consumption, and also the blocking probability is evaluated under various traffic environments through OPNET. Simulation results show that our algorithm reduces energy consumption while maintaining the quality of service.
Over the last few years, the increase in bandwidth-intensive multicast applications such as HDTV, video conferencing, interactive distance learning, live auctions, and distributed games has driven an enormous increase in the volume of Internet traffic [1, 2]. Such explosive growth in traffic has led to an increase in the energy consumed by networks. Baliga
Wavelength-division multiplexing (WDM) has developed as a technology to support bandwidth-intensive multicast applications by establishing a lighttree to transmit data from one source node to multiple destination nodes. However, failure of a single fiber on the light-tree will disrupt the transmission of information to several destination nodes. Thus, multicast survivability is important in WDM networks. Several studies have proposed protection schemes to reduce network energy consumption [4-7]. In the proposed schemes, the devices used in the protection paths switch into sleep mode and promptly wake up when a failure occurs. For example, [4] found that a significant reduction in energy consumption could be achieved by using a provisioning solution that packed the working and protection paths into different fibers. However, the schemes proposed in such studies did not consider multicast traffic.
Various schemes have been proposed to protect against link failure in multicast networks, including tree-based [8], link-based, and segment-based protection [9]. Tree-based protection finds two link-disjoint light trees that start from the same source and end at the same destination nodes. Link-based and segment-based protection schemes respectively provide protection paths for each link and segment on the working tree. In [10], the authors proposed a multicast protection scheme through spanning paths (MPSP) to reduce the total bandwidth allocation. However, network energy consumption was not taken into account in the design of such multicast algorithms. Reference [11] proposed a green multicast grooming algorithm (GMG) based on dedicated spanning path protection. However, the authors did not consider the use of spare capacity that could be shared between different multicast connections.
The objective of this paper is to design a multicast algorithm for reducing energy consumption in survivable WDM networks while sharing spare capacity. In order to do this, we define two link cost functions, one for the working path and another for the protection path. The two link cost functions used in the routing procedure allow the proposed algorithm to pack the working and protection paths into different fibers to increase both the number of sleeping fibers and the amount of spare capacity that is shared. The proposed algorithm is then evaluated in terms of the number of sleeping fibers, energy consumption, and blocking probability.
The rest of this paper is organized as follows: Section 2 introduces conventional multicast algorithms. Section 3 details the proposed energy-efficient multicast algorithm (EEMA) for survivable WDM networks. In Section 4, the proposed algorithm is evaluated through a simulation, and the conclusions are given in Section 5.
Data can be transmitted in various ways on a network: by unicasting, broadcasting, anycasting, or multicasting. In multicasting, the same information is sent to a group of nodes, and upon the arrival of a multicast request, a light-tree is established to transmit the traffic. The light-tree is an extension of the concept of a light path, incorporating multicasting capabilities [12]. A light-tree for a multicast session can be derived from the Steiner tree problem, in which a minimum cost light-tree should be found, and since the Steiner tree problem is
To improve network reliability, a protection tree is established to transmit traffic when a link failure occurs. Several approaches have been proposed in the literature [8-11] to improve network reliability. In [8], the authors propose a multicast tree-based protection scheme that protects a working tree by deriving a link-disjoint protection multicast tree. Two trees are said to be link-disjoint if they do not have any links in common. When a link failure occurs, the destination nodes that are affected reconfigure their switches so that data can be received from the protection tree. The drawback of using this scheme is that in many cases, it is difficult to find two link-disjoint light-trees. In [9], the authors investigated the use of link-based and segment-based protection schemes. A segment is defined as the sequence of edges from the source or from any splitting node, to a leaf node or a splitting node on the working tree. In [10], the authors proposed a spanning path-based protection scheme. A spanning path is a path from a leaf node to any other leaf node in the working tree; this scheme can reduce resource allocation, compared to link-based or segment-based protection. The protection schemes are divided into dedicated protection and shared protection schemes. In a dedicated protection scheme, a spare resource is specifically allocated for a particular working path. In a shared protection scheme, network resources along a protection path are reserved for multiple working paths when considering a single link failure. This implies that a shared protection scheme has higher capacity efficiency than a dedicated protection scheme.
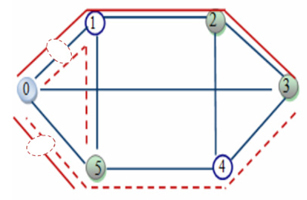
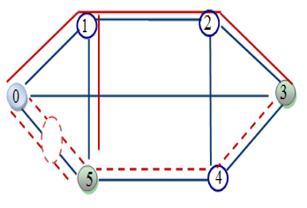
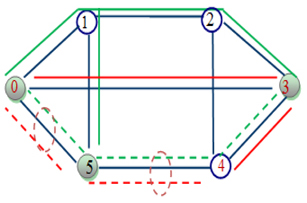
Capacity-sharing schemes for multicast networks can be classified into three categories: self-sharing intrarequest sharing, and interrequest sharing [10]. Self-sharing schemes involve sharing capacity between the working and protection paths of the same multicast. In Fig. 1, the multicast is (0, {5, 3}), where node 0 is the source node. The working-tree is {0-1-2-3, 0-5} and the protection paths are {0-1-5, 0-5-4-3}. The links (0-1) and (0-5) can be shared. An intrarequest sharing scheme shares link capacity among the protection paths of the same multicast connection. In Fig. 2, the multicast request is {0, {5, 3}}. The protection paths for working-paths (0-1-5) and (0-1-2-3) are (0-5) and (0-5-4-3), respectively. The capacity on link 0-5 can be shared by the two protection paths. Interrequest sharing is capacity sharing among protection paths of different multicast connections. In Fig. 3, there are two multicast connections: {0, {5, 3}} and {3, {0, 4}}. The capacity of links 0-5 and 5-4 can be shared by two multicast connections.
2.3. Conventional Multicast Algorithm
In [10], the authors proposed a multicast protection scheme through spanning paths (MPSP). The key idea of MPSP is focused on minimizing the total bandwidth allocation by identifying a protection path for each spanning path to appropriately select the parts of these protection paths that form a protection tree. In this case, the scheme proposed by the authors considered self-sharing, intrarequest sharing, and interrequest sharing. However, this algorithm did not consider the energy consumed by the network.
In [11], the authors proposed a green multicast grooming algorithm based on spanning path dedicated protection (GMG) that considered the energy consumption of the network. This scheme dynamically adjusts the link cost to search for working and protection paths to decrease energy consumption. However, this method does not share spare capacity among the different multicast connections.
III. ENERGY-EFFICIENT MULTICAST ALGORITHM
In this paper, a multicast request is accepted if both a working and a protection tree are available. The energy-efficient routing and resource allocation problem for a multicast in a survivable WDM network is formulated as follows. The given network is denoted as G (N, L), where N is the node set and L is the link set.
l(∈ L): a link of network G : holding time of ∂th wavelength on link l hlholding time of the fiber on link l if the state of ∂th wavelength on link l is P or U; otherwise, . xlxl = 0 if the state of the fiber on link l is P or U; otherwise, xl = 1. Al: The number of amplifiers on link l WTi: Working tree for multicast request Ri PTi: Protection tree for multicast request Ri : The jth spanning path on WTi : Protection path for , where and are link-disjoint : Residual capacity on link l : Sharable spare capacity on link l Sl: Sl = 1 if link l has sharable spare capacity; otherwise, Sl = 0. α: Weight factor : Relative link cost of l to search for the working tree : Relative link cost of l to search for the protection path ACl: Absolute link cost of l , where ACl is the physical length of link l ε: Small value to encourage spare capacity sharing wl, pl, ml, ul: Binary variables {0, 1}, ul = 0 if the state of link l is U; otherwise, ul = 1.
This paper assumes that a link is in one of four states: dedicated working path (

When a multicast request arrives, a working tree WT
Before the working tree is computed, the link-costs in the network are adjusted according to Eq. (2). If the residual capacity of a link is less than the required bandwidth, the link-cost will be set to infinity. If the link has enough residual capacity, we define the link-cost to be adaptively adjusted according to the link-state. In Eq. (2), the cost of the link with a state

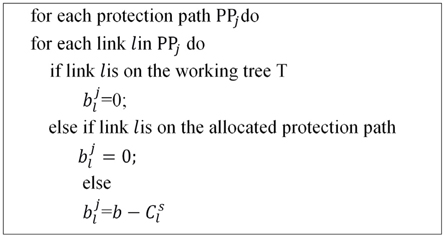
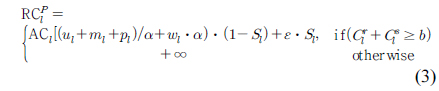
Before the protection path is computed for a specific spanning path , the cost of the links on the spanning path is set to infinity, to satisfy the link-disjoint constraint. Then the link- costs are adjusted according to Eq. (3), and if the summation of sharable and residual capacities on a link is less than the required bandwidth, the link-cost is set to infinity to avoid selection. To increase the spare capacity that is shared, Eq. (3) sets a very small value of
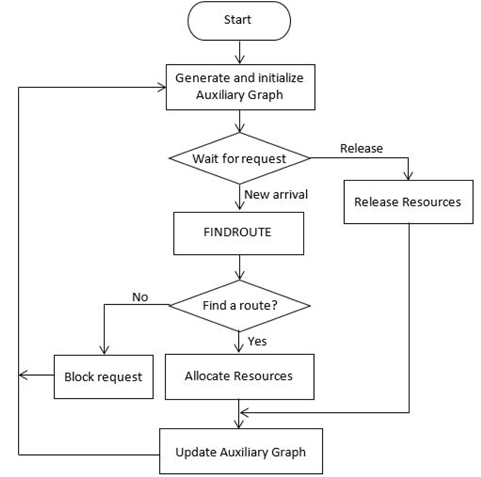
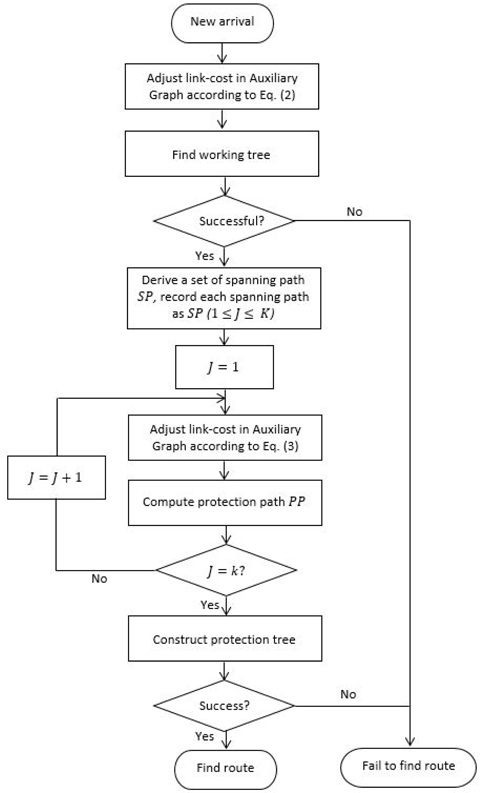
This section uses the flowchart shown in Fig. 4 to introduce the details of the EEMA algorithm. The EEMA (Energy-Efficient Multicasting Algorithm) generates an auxiliary graph to search for the working and protection trees. If a new request arrives, the EEMA uses the FINDROUTE function to compute the working and protection trees. If a route for the multicast request is successfully found, the EEMA allocates resources to each link on the working and protection trees and updates the auxiliary graph. Here resource allocation includes both wavelength and bandwidth allocation, and the request is blocked if the EEMA cannot find a working tree or a protection tree for the multicast request.
3.3.1. Multicast Routing
This subsection explains how to select working and protection trees for a dynamic multicast request, with the objectives of reducing energy consumption and improving sharing of spare capacity. The routing procedure for the EEMA shows “FINDROUTE” in Fig. 5. When the multicast request arrives, the EEMA adjusts the link-cost according to Eq. (2) and computes a working tree WT
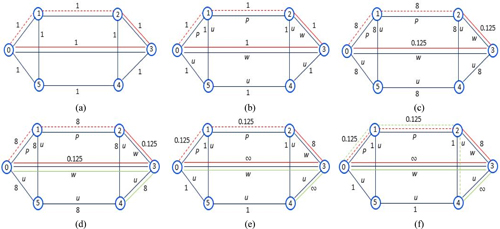
Figure 6 shows an example illustrating the routing procedure for the EEMA. Figure 6(a) shows the physical topology in which a multicast
3.3.2. Resource Allocation and Release
After the working and protection trees have been computed for the multicast request, the wavelength and bandwidth for both trees need to be allocated. To allocate resources for the working tree, the EEMA assigns a wavelength by using a first-fit scheme [17, 18] for each link of the tree, and then assigns the required
Whenever a multicast connection drops from the network, the wavelength and bandwidth allocated to the working and protection trees need to be released. The procedure to release these resources is comprised of two parts: releasing the resources on the working tree, and releasing those on the protection tree. For the working tree, the EEMA simply releases the allocated bandwidth for each link. For the protection tree, the procedure is more complex: To release the resources on each link of the protection tree, a minimum needed-protection capacity MNC

3.3.3. Failure Restoration Procedure
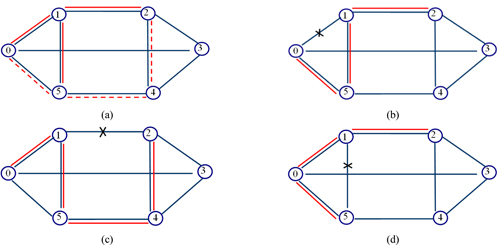
If a link failure occurs in the working tree, the multicast request is restored using the protection paths that were derived. This subsection uses an example to describe how to restore a failed multicast request. When a link failure occurs, the working tree is divided into two parts, M1 and M2. M1 stores the nodes that are not affected by the link failure, while M2 stores the nodes that are affected. A protection path is selected to connect M1 to M2.
Figure 8(a) shows an example where the working tree is (0, {2, 5}) and the protection tree is {0-5, 5-4-2}. If link 0-1 fails, the working tree is divided into M1 = {0} and M2 = {1, 5, 2}, and the working tree is reconfigured as shown in Fig. 8(b). Figures 8(c) and 8(d) illustrate how to restore the multicast request when a failure occurs on links 1-2 and 1-5 respectively.
The proposed algorithm and conventional algorithms were evaluated over an NSF network with 14 nodes and 21 links. This paper assumes that each node has full wavelength conversion and splitting capability, each link is comprised of only one fiber, and each fiber carries two bidirectional wavelength channels. The bandwidth for each wavelength is OC-48. The idle or the protection devices in network are switched into sleep mode, and their energy consumption is negligible. The energy consumption of the active devices is set according to [11], as shown in Table 1.
[TABLE 1.] Energy consumption of components
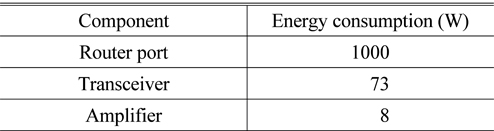
Energy consumption of components
10,000 multicast demands are generated according to a Poisson distribution with average arrival rate λ. The holding time of each multicast follows a negative exponential distribution with mean 1/
The performance of the proposed algorithm is evaluated in terms of its blocking probability, average energy consumption (AEC), and protection bandwidth ratio (PBR), as defined below.
Blocking probability: the ratio of the number of multicast requests that are blocked to the number of all multicast requests that have arrived.
AEC: the ratio of the total network energy consumption (E) to the number of serving demands (

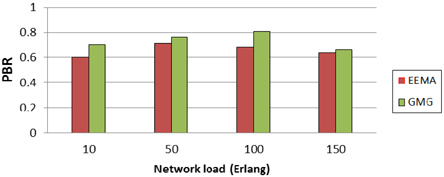
PBR: the ratio of the bandwidth reserved for the protection path

The simulation model is implemented using OPNET Modeler 14.5 running on Windows 7 Professional with a 2.8 GHz CPU and 4 GB of RAM. OPNET has a three-tiered hierarchy that consists of a network domain, node domain, and process domain. The node model specifies an object in the network domain, and the process model specifies an object in the node domain. The OPNET simulation is event-driven; the simulation time advances when an event occurs. Events can be generated by BEGSIM/ENDSIM interrupts, self-interrupts, or packet arrivals. In OPNET, discrete events and continuous models are created using an object-oriented paradigm in Visual Basic, C, or Visual C++.
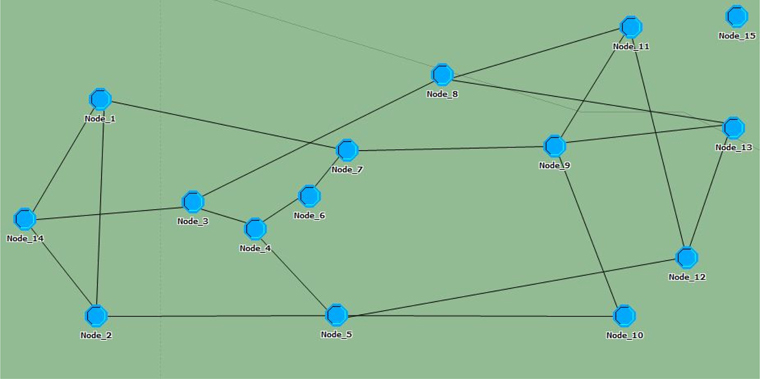
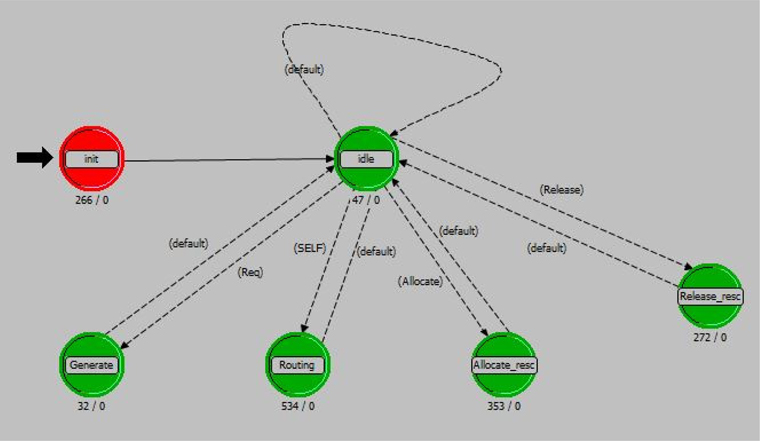
The EEMA is executed on a mesh network with 14 nodes and 21 links, as shown in Fig. 9. Two kinds of nodes can be seen in this figure: a control node (node 15), and 14 mesh nodes (nodes 1-14). The control node generates multicast requests and runs the EEMA algorithm. The process model for the control node in Fig. 10 includes five states:
4.4. Simulation Results and Analysis
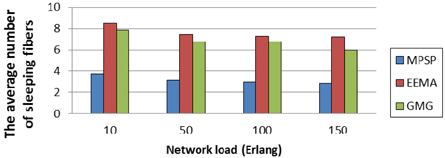
Figure 11 compares the average number of sleeping fibers for MPSP (Multicast Protection Scheme through Spanning paths), GMG (Green Multicast Grooming), and the EEMA (Energy-Efficient Multicasting Algorithm). The average number of sleeping fibers for the EEMA and GMG are higher than that for MPSP, because the EEMA and GMG gather more protection paths into sleeping fibers. The number of sleeping fibers for the EEMA is higher than that for GMG because the EEMA shares the spare capacity of the links among different multicast connections.
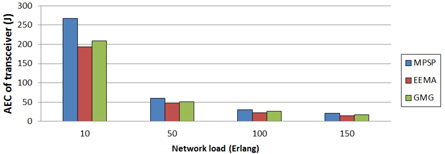
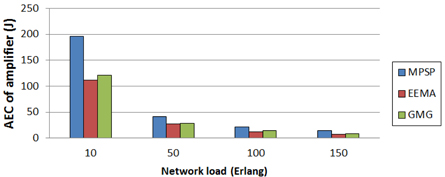
Figures 12-14 show the average energy consumption of the core router, transceiver, and amplifier, respectively. The AEC of the core router is 90% of the total energy consumption which implies that the core router is the main consumer of energy. The AEC of the core router, transceiver, and amplifier for EEMA are lower than those for MPSP and GMG. This is because the EEMA increases the number of sleeping fibers and switches the router ports, transceivers, and amplifiers on those fibers into sleep mode to reduce energy consumption.
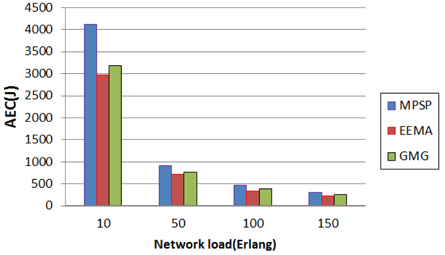
Figure 15 presents the average energy consumption for MPSP, EEMA, and GMG. The AEC for the EEMA can be seen to be lower than those for MPSP and GMG at all times. The EEMA gathers the working and protection paths into different fibers to increase the number of sleeping fibers and the spare capacity that is shared. The EEMA can save up to 26% and 12% of energy, compared to MPSP and GMG, respectively, and the energy savings is larger under higher traffic load. This implies that the number of shared links for the EEMA increases under a heavy traffic load.
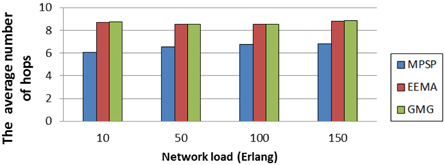
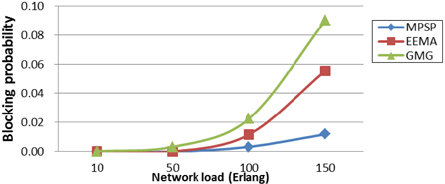
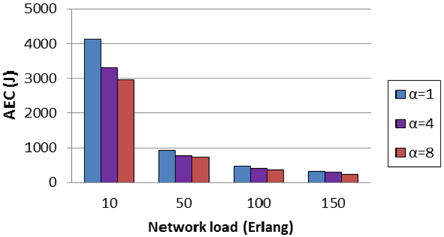
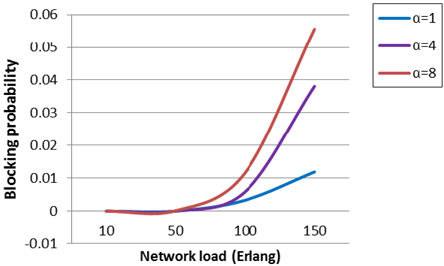
Figure 16 shows the average number of hops for MPSP, EEMA, and GMG. The average number of hops for the EEMA and GMG are higher than that for MPSP because the EEMA and GMG choose a route with more active fibers as the working path, and choose a route with more sleeping fibers as the protection path, while MPSP always chooses the shortest paths. Figure 17 clearly shows that the blocking probability for the EEMA is higher than that for MPSP, because the protection paths of EEMA are allocated to longer routes that use sleeping fibers, as shown in Fig. 16. Figure 17 shows that the blocking probability for the EEMA is lower than that for GMG. The EEMA considers interrequest sharing to increase resource utilization. As shown in Fig. 18, the PBR for the EEMA is lower than that for GMG, which indicates that the EEMA has a higher degree of capacity sharing. Figures 19 and 20 compare the AEC and blocking probability of the EEMA based on the weight factor. As the figures suggest, with an increase in weight factor, the AEC decreases, while the blocking probability increases. Since more protection paths are collected into sleeping fibers, more devices enter the sleep state.
In this paper, we have proposed an energy-efficient multicast algorithm (EEMA) to achieve efficient routing and bandwidth allocation in survivable WDM networks. The working and protection paths of a multicast request are selected using two link-cost functions, defined by taking into account energy consumption. The proposed link-cost functions allow EEMA to pack working and protection paths into different fibers and switches, so that more components enter sleep mode. The proposed algorithm was compared to the conventional multicast algorithms MPSP and GMG. The results showed that the EEMA increased both the number of sleeping fibers and the amount of spare capacity. These resulted in decreasing energy consumption. Compared to conventional MPSP and GMG, the EEMA saved up to 26% and 12% of the energy consumed, respectively.