최근들어 무인선박의 민간분야 수요(환경모니터링, 통신) 및 군사 목적의 수요(정찰, 경비)가 증대됨에 따라 무인선박과 관련된 연구가 활발히 수행되고 있다. 무인선박은 극한환경에서의 임무와 같이 위험도가 높은 임무 또는 복잡한 의사결정이 필요없는 단순 반복 작업에 대하여 기존의 유인체계를 대체하여 인간의 안전성을 향상시키고 인력의 개입을 최소화 할 수 있다는 장점이 존재한다.
무인선박의 안정적이고 효과적인 임무수행을 위해서는 기존에 인간의 역할이었던 주변환경 인지 및 의사결정 과정을 무인선박내에 탑재된 컴퓨터가 수행해야한다. 하지만 무인선박 자율운항기술의 기술성숙도가 완전한 자율운항을 위한 수준까지는 도달하지 못한 관계로 아직까지도 도킹 등 일부 임무에 대해서는 사용자의 원격조정을 통해 운용되는 것이 현실이다. 본 논문에서는 이러한 도킹과정에서 도킹스테이션에 무인선박이 자율적으로 유도되도록 하는 새로운 유도법칙을 제안하였고, 이를 통해 인간의 개입을 감소시키고 무인선박의 자율도(Degree of autonomy)를 증가시키는 것을 목표로 하였다.
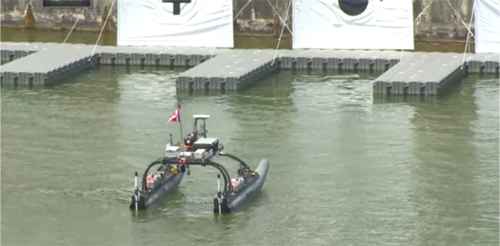
본 연구에서는 무인선박이 움직이는 운동체가 아닌, 정지되어 있는 도킹스테이션에 대하여 정면방향으로 도킹하는 경우를 연구대상으로 설정하였다. Fig. 1은 본 연구에서 연구대상으로 선정한 무인선박 도킹의 예시를 나타내고 있다. 무인선박은 도킹스테이션의 정보(위치, 방향, 크기)를 사전에 알고 있다고 가정하였고, 이를 바탕으로 유도명령을 생성하였다.
무인선박의 도킹에 대한 연구는 주로 무인선박과 자율수중운동체(AUV, Autonomous underwater vehicle) 또는 모선(Mother ship)과의 도킹에 대하여 이루어져왔다. Martins et al. (2007)은 수상에서 표류하는 자율수중운동체를 무인선박에 설치된 비전센서를 이용하여 탐지하고, 이를 바탕으로 순수추적유도법칙을 사용하여 도킹하는 연구를 수행한 바 있다. Dunbabin et al. (2007)과 Dunbabin et al. (2008)은 정지되어있는 AUV에 대하여 무인선박이 도킹하는 연구를 수행한 바 있는데 이때 VFF (Virtual force field)알고리즘을 사용하여 무인선박을 유도하였다. Breivik et al. (2006), Breivik et al. (2008)과 Breivik and Loberg (2011)은 움직이는 모선과 무인선박간의 도킹에 대한 연구를 수행한 바 있다. 모선을 추종하기위해 Constant bearing유도법칙과 순수추적유도법칙을 조합하여 모선의 근처에서 움직이는 가상의 점을 추종하는 방식으로 도킹을 수행하였다. 앞서 언급한 기존 유도법칙들의 경우, 움직이는 모선 또는 자율수중운동체를 도킹대상으로 삼고있기 때문에 도킹스테이션과의 도킹에서 고려해야 할 도킹불가영역으로의 진입, 무인선박의 동역학 등에 대한 요소를 고려할 수 없다는 특징이 있다. 따라서, 본 연구에서는 이들 요소를 고려할 수 있는 무인선박의 도킹 유도법칙을 제안하고자 한다.
본 논문의 구성은 다음과 같다. 2장에서는 무인선박의 도킹에 사용되는 고전 유도법칙에 대하여 설명하였다. 3장에서는 본 논문에서 제안하는 포텐셜 필드 기반의 유도법칙에 대하여 설명하고 이를통해 유도명령을 생성하는 방법에 설명하였다. 4장에서는 제안된 유도법칙을 기반으로 도킹 시뮬레이션을 수행하고 몬테카를로 시뮬레이션을 이용하여 포텐셜 필드 기반 유도법칙의 성능을 검증하였다. 5장에서는 본 연구에 대한 결론과 향후 수행할 연구계획 등을 제시하였다.
2.1 순수추적유도법칙(Pure pursuit guidance law)
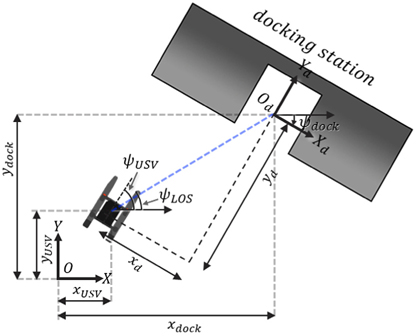
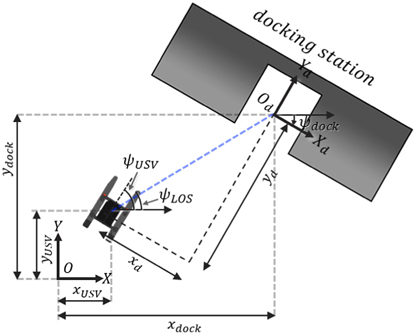
순수추적유도법칙은 무인선박의 선수각(Heading angle)이 항상 목표물을 향하도록 유도명령을 생성하는 법칙이다. 무인선과 도킹스테이션의 상대위치에 의해 시선각(Line of sight)이 결정이 되면 무인선의 선수각명령을 시선각과 동일하게 만드는 유도명령을 생성한다(Fig. 2). 무인선으로부터 도킹스테이션까지의 시선각은 아래의 식 (1)에 의해 계산된다.

목표물까지의 시선각이 결정되면, 시선각과 무인선의 선수각의 차이를 0으로 만들도록 선수각 명령을 식 (2)와 같이 정의하고, 계산된 유도명령을 추종한다.

순수추적유도법칙의 경우 선수각명령을 추종할 때 도킹의 초기상태에서의 횡방향 오차(
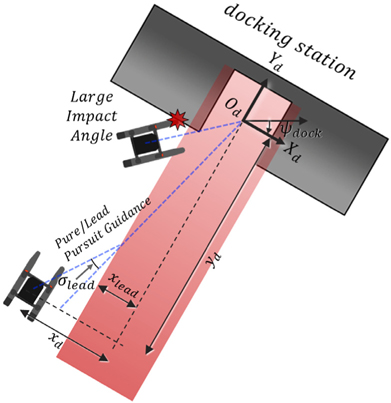
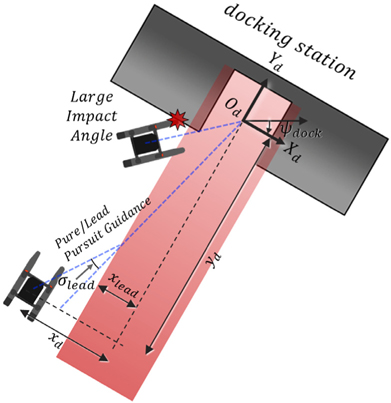
2.2 순수/앞섬 추적유도법칙(Pure/lead pursuit guidance law)
순수/앞섬 추적유도법칙은 항주의 초기단계에서는 시선각에 앞섬각

이때

이때,
포텐셜 필드를 이용한 유도법칙은 VFF(Vector force field)라는 이름으로 모바일로봇의 충돌회피 및 도킹 분야(Jantapremjit and Wilson, 2008; Feezor et al., 2001)에 빈번히 사용되었다. 무인선박의 경우, 일반적으로 횡 방향 추진기(Side thruster)가 없을 경우 구동기가 부족한 시스템(Underactuated system)이므로 순수좌우동요(Pure sway) 운동을 발생시킬 수 없다. 따라서, 도킹스테이션에 대한 횡방향 오차를 감소시키기 위해서는 전후동요(Surge)와 선수동요(Yaw)운동이 연성되어 발생하기 마련이다. 하지만 일반적으로 무인선박은 회전반경에 대한 비홀로노믹(Non-holonomic)한 구속조건을 갖기 때문에 횡방향 오차(
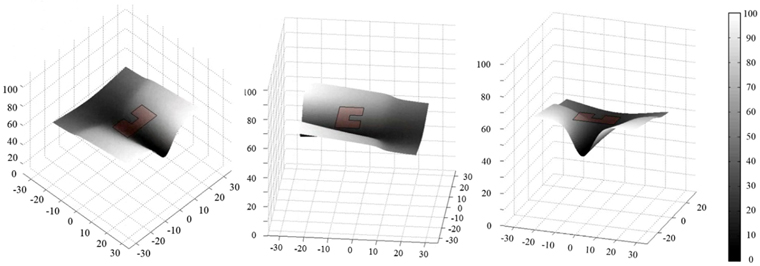
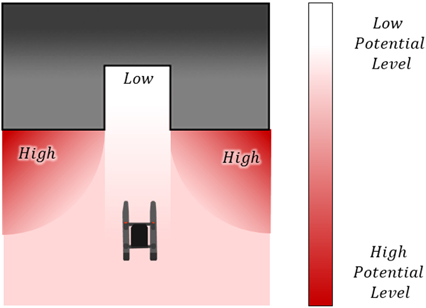
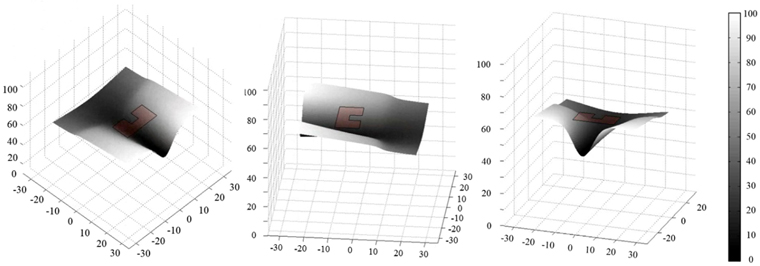
본 연구에서는 Fig. 6과 같은 형상의 포텐셜 필드(
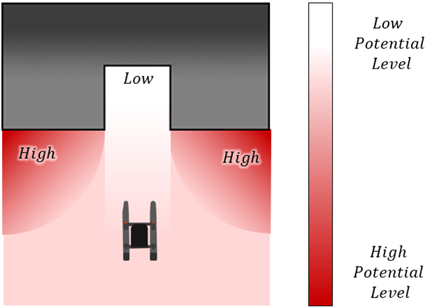
(1) 도킹유도법칙의 최종목적은 도킹스테이션으로 무인선박을 유도하는 것이다. 따라서 도킹스테이션이 위치한 영역(Fig. 4)에서 가장 낮은 포텐셜을 갖고, 이외의 영역에서는 이보다 높은 값을 가져야한다. 즉, 무인선박이 임의의 점에서 출발하여 도킹스테이션에 가까워질수록 포텐셜 값은 단조(Monotonic) 감소해야 한다.
(2) 포텐셜 필드는 무인선박이 도킹 불가영역(Fig. 4)에 접근하는 것을 방지해야하므로, 해당영역에서 상대적으로 높은 포텐셜 값을 가져야 한다. 이러한 영역을 본 연구에서는 포텐셜 언덕(Potential hill)이라 정의하고, 이를 구현하기위한 방법을 본 장의 후반부에 제시하였다.
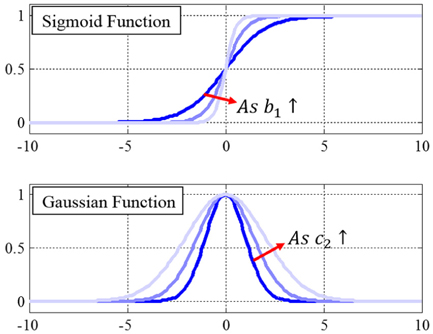
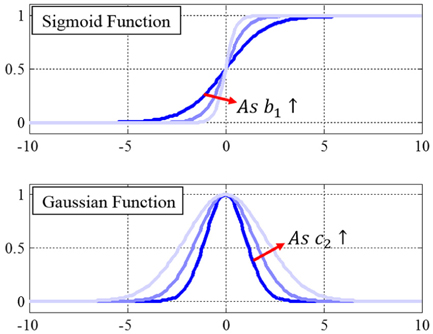
(3) 순수/앞섬 추적유도법칙의 경우처럼 임의의 경계에서 무인선박이 불연속적인 유도명령을 생성하는 것은 무인선박의 급작스러운 기동을 발생시키기 때문에 바람직하지 않다. 이를 방지하기위해서는 연속적인 유도명령을 생성시키는 유도법칙이 필요한데, 본 연구에서는 연속적인 형태의 해석함수(Analytic function)들의 조합을 이용하여 포텐셜필드를 구성하였다. 이와 같은 방법은 단순한 함수들의 조합으로 연속적인 유도명령을 생성할 수 있으며, 유도명령 생성에 필요한 계산속도가 빠르다는 장점이 존재한다.



포텐셜필드를 구성하는데 사용된 해석함수는 시그모이드 함수, 가우시안 함수, 직선이다. 각 함수의 수학적 표현은 식 (5)~(7)에 제시되어있고, 형상은 Fig. 5에 제시되어있다. 시그모이드 함수는 0과 1에 무한히 가까워지는 형태를 가진 함수이다. 본 연구에서는


포텐셜 필드의 구성이 완료되면, 위의 식 (9)를 이용하여 목표 선수각(𝜓
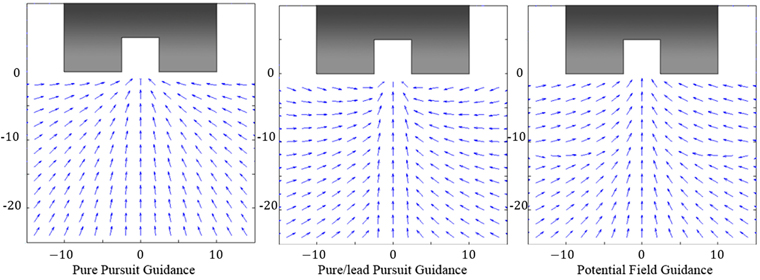
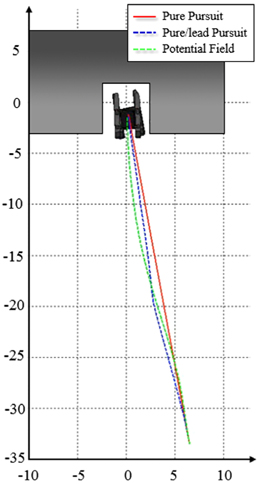
본 장에서는 앞서 제시한 고전유도법칙과 포텐셜 필드를 이용한 유도법칙의 비교를 통해 본 논문에서 제시하는 유도법칙의 타당성을 검증하였다. 시뮬레이션에 사용된 유도법칙은 순수추적유도법칙, 순수/앞섬추적유도법칙, 포텐셜 필드를 이용한 유도법칙이고, 외란이 없는 환경에서 동일한 제어기를 사용하여 도킹을 수행하는 시뮬레이션을 진행하였다. 시뮬레이션상에서 최종 목표점은 도킹스테이션의 중심점으로 정의하였고, 각각의 유도법칙을 통해 최종점을 추종하는 방식으로 무인선박을 유도하였다. 무인선박의 동력학을 고려하기위해 선박의 비선형 조종운동방정식모델을 사용하였고, 무인선박의 운항속도는 3노트로 정의하였다.
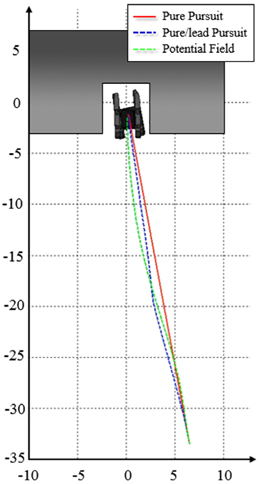
Fig. 8은 동일한 초기조건하에 세가지 유도법칙을 이용하였을 때, 시뮬레이션을 통해 계산된 도킹궤적을 나타내고 있다. 초기 위치
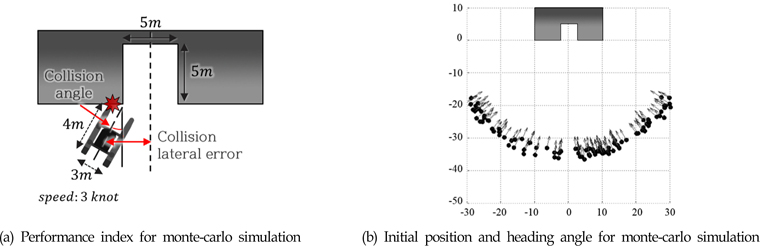
4.2 몬테카를로 시뮬레이션(Monte-carlo simulation)
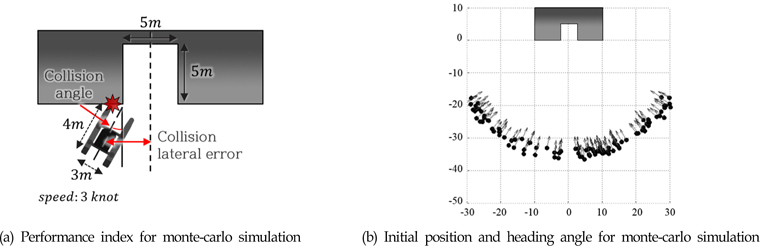
각 유도법칙에 대한 성능을 정량화하여 비교하기 위하여 도킹시나리오에 대한 몬테카를로 시뮬레이션을 수행하였다. 몬테카를로 시뮬레이션에서는 무인선박의 초기위치를 랜덤변수로 설정하고, 각각의 경우에 대하여 도킹을 수행하고, 평가하였다. 무인선박의 초기위치는 도킹스테이션에 대한 방위각 범위(-45°~-135°)를 갖는 균등분포로 정의하고, 도킹스테이션과 무인선박간의 거리는 평균 35m, 표준편차 1m의 정규분포를 갖도록 설정하였다(Fig. 9(b)). 시뮬레이션의 성능지수로는 무인선이 도킹스테이션에 접근하여 첫 번째로 충돌하는 순간의 충돌각과 횡방향 오차로 정의하였다(Fig. 9(a)).
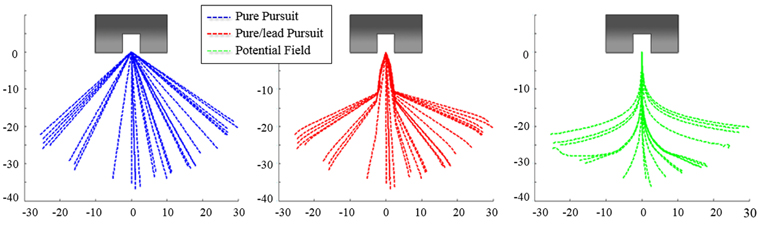
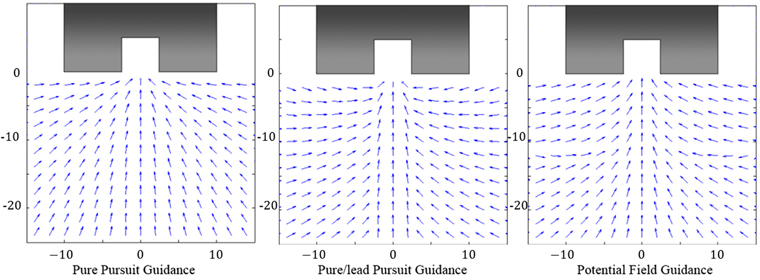
Fig. 10은 100번의 시뮬레이션 중 20번의 시뮬레이션에 대한 궤적을 나타낸 그래프이다. 순수추적유도법칙을 사용한 경우, 초기횡방향오차가 클 경우 도킹스테이션에 진입하는 입사각이 존재하기 때문에 도킹스테이션의 측면부에 충돌하는경우가 발생한다. 순수/앞섬 추적유도법칙을 사용할 경우 순수추적유도법칙을 사용한 경우에 비하여 도킹스테이션에 진입하는 입사각이 현저히 감소하는 경향을 확인할 수 있으나, 앞섬각이 불연속적으로 변함에 따라 급격한 기동을 수행하게 된다는 단점이 존재한다. 포텐셜필드 기반 유도법칙을 사용할 경우, 이러한 불연속적인 기동이 일어나는 것을 방지할 수 있으며, 도킹단계의 초기에 횡방향오차를 감소시키는 방향으로 무인선을 유도시킴으로써 도킹이 불가능한 영역에 무인선박이 진입하지 못하도록 하는 것을 확인할 수 있다.
총 100번의 몬테카를로 시뮬레이션을 수행한 결과, 각각의 유도법칙에 대해 Table 1과 같은 성능지수의 RMS(Root mean square)값을 갖는 것을 확인하였다. 포텐셜필드를 이용한 경우 타 유도법칙을 사용한 경우에 비해 현저히 낮은 수준의 충돌각과 충돌횡방향오차를 갖는 것을 확인할 수 있었고, 이는 곧 도킹이 불가능한 영역에 접근할 확률이 타 유도법칙에 비해 낮은 것을 의미한다.
[Table 1] Performance index for each guidance law

Performance index for each guidance law
물론, 기존의 유도법칙을 이용하더라도 최종점에 대한 단순 추종제어가 아닌 경유점에 대한 추종이나 도킹방향에 대한 정렬(Alignment)을 수행함으로써 도킹성공률을 향상시킬 수 있는 것이 사실이지만, 포텐셜필드기반 유도법칙을 이용할 경우 추가적인 조건이나 예외처리 없이 기본유도법칙만을 이용하여 도킹을 수행할 수 있으므로 도킹단계를 최대한 단순화하면서 도킹 성공률을 향상시킬 수 있다는 장점이 있다. 또한, 타 유도법칙과 비교하여 무인선박의 동역학이나 도킹스테이션의 형상에 대한 조건을 포텐셜필드 내에서 고려하여 유도명령을 생성할 수 있다는 장점이 존재한다.
본 논문에서는 무인선박의 도킹을 위한 유도법칙을 제안하였다. 무인선박의 경우, 구동기가 부족한 시스템(Underactuated system)임과 동시에, 회전반경에 대한 비홀로노믹(Non-holonomic)한 구속조건을 갖는데, 이 때문에 도킹이 불가능한 영역이 존재한다. 본 논문에서 제시하는 포텐셜필드 기반 유도법칙은 이러한 도킹이 불가능한 영역으로 무인선박이 유도되지 않도록 횡방향 오차를 도킹의 초기단계에 감소시킴으로써 고전 유도법칙에 비해 안전한 도킹성능을 확보하였다.
본 연구와 관련하여 향후 계획으로 조류 및 풍하중 등의 환경 하중이 존재할 때 이를 고려한 유도법칙을 설계하는 연구, 최적화 기법 등을 이용하여 포텐셜필드를 구성하는데 사용되는 파라미터를 체계적으로 결정하는 연구를 수행할 계획이다.