In general ships and FPSOs, roll damping is very small and consequently roll motion is very large at the roll resonance frequency. Proper evaluation of the roll damping coefficient at the resonance frequency is an important task in the study of roll motion and usually it is done by the analysis of free roll decay tests. The relative decrement method based on energy relation has been used mainly for the evaluation of roll damping coefficient from the roll decay test so far. As another method, the logarithmic decrement method based on equivalent linear decay assumption can be used for the same purpose and it is relatively simple. In this paper, both of the relative decrement method and the logarithmic decrement method are used for the evaluation of roll damping coefficient including quadratic damping from the free roll decay tests, and their results are cross-checked for verifying the obtained damping coefficients. Through applications to a box-type floating body equiped with bilge keels, it is shown that the two methods give almost the same damping coefficients in a practical view point and the cross-check of their results is to be a good tool to prevent a possible error. And also the quantitative effects of the bilge keels on the roll damping of box-type floating body are shown and discussed.
선박 혹은 부유식 해양 구조물의 파랑 중 동요는 선상에 설치된 기기의 운용뿐만 아니라 선원의 임무수행과 승객의 승선감 등에 많은 악영향을 준다. 이런 이유로 선체의 동요를 억제하는 효율적 방안을 찾기 위한 관심과 노력이 기울여 지고 있다.
선박이나 FPSO 등의 횡동요(roll)는 다른 운동들에 비해 자체 감쇠력이 작아 심한 공진현상이 나타나며, 감쇠계수는 공진시 운동응답에 직접적인 영향(운동크기가 감쇠계수에 반비례 함)을 미치므로 공진점에서의 횡동요 감쇠계수의 정확한 산출은 횡동요 연구에 있어 중요한 과제라고 할 수 있다. 횡동요 감쇠계수의 산출에는 주로 모형을 이용한 횡동요 감쇠실험(roll decay test)이 이용되는데, Choi, et al. (2005)과 Jung, et al. (2007), Jang, et al. (2010), Lee, et al. (2012) 등은 감쇠실험을 부유체의 횡동요 연구에 활용하였고, Chun, et al. (2000a; 2000b)과 Kim, et al. (2000) 등은 감쇠실험을 횡동요 저감장치의 성능파악에 활용하였다.
횡동요 감쇠실험으로부터 감쇠계수를 산출하는 데는 주로 상대감쇠(relative decrement)를 이용한 산출법(상대감쇠법)이 많이 사용되어 왔는데, 이 방법은 횡동요 진폭감소에 따른 동복원력 감소량과 감쇠모멘트가 소모하는 에너지와의 관계에 기초하고 있다. 다른 방법으로 대수감쇠(logarithmic decrement)를 이용한 산출법(대수감쇠법)을 사용할 수 있으며, 이 방법은 각 순간의 횡동요 비선형 감쇠 과정을 바로 등가의 선형 감쇠에 의한 과정으로 간주하는 물리적 근사에 기초한다. 대수감쇠법은 횡동요 연구에 사용된 예가 적지만 상대적으로 유도과정이 단순하고 계산도 간편한 장점이 있다.
본 논문에서는 자유 횡동요 감쇠실험을 통한 감쇠계수 산출시 신뢰성을 높이기 위해 상대감쇠법과 대수감쇠법을 병행하여 사용할 것을 제안하였으며, 빌지킬을 장착한 박스형 부유체를 대상으로 2차 항 감쇠까지를 고려하여 횡동요 감쇠계수를 산출하였고 그 특성을 고찰하였다.
선체의 횡동요 운동방정식은 다음 식으로 표현될 수 있다.

여기에서 와 ,

여기에서
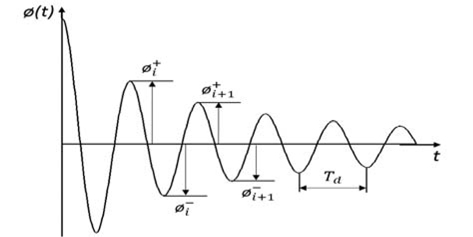
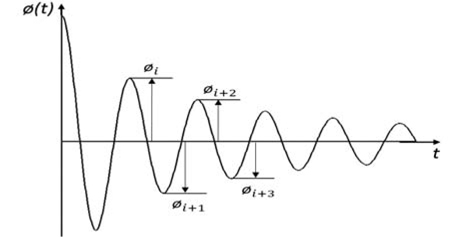
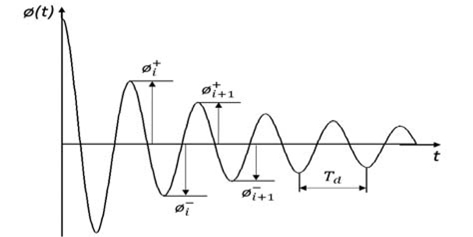
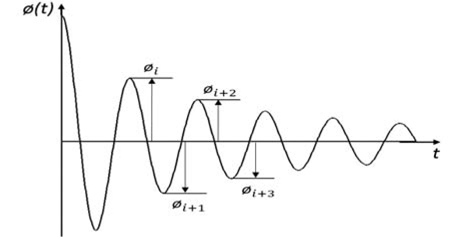
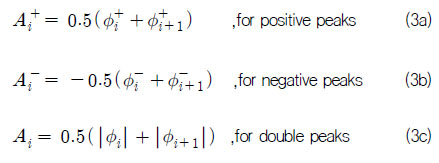
정수 중에서 모형을 초기 횡경사각까지 기울이고 이후 정지상태로부터 자유롭게 놓아주는 방식으로 횡동요 감쇠실험(roll decay test)을 수행하면, Fig. 1과 Fig. 2의 자유 횡동요 시간이력(time history) 곡선을 얻을 수 있다. 감쇠계수를 산출하기 위해 Fig.1의 , 등 양의 극값들(positive peaks)을 사용할 수 도 있고 , 등 음의 극값들(negative peaks)을 사용할 수도 있으며, Fig.2의
각 극값들의 경우 구간별 평균 진폭은 다음과 같다.
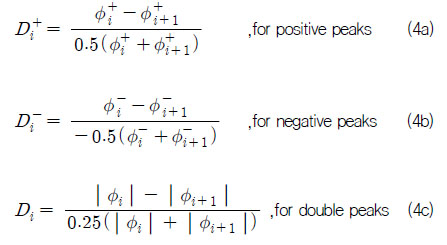
상대감쇠(relative decrement)는 순차적으로 감소하는 횡동요 진폭의 한 주기 당 감소량을 구간별 평균 진폭으로 나누어 다음과 같이 정의한다.
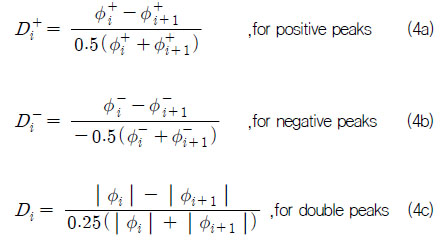
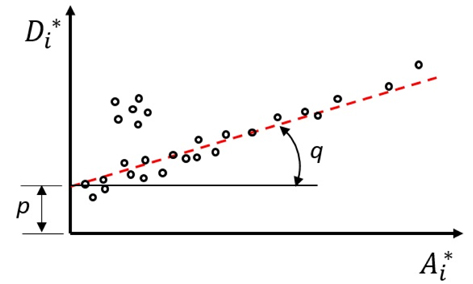
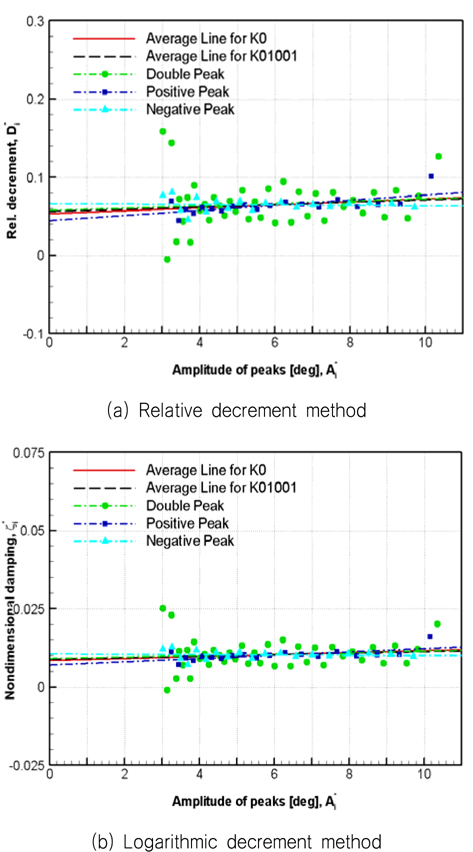
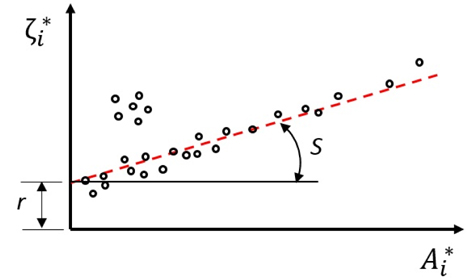
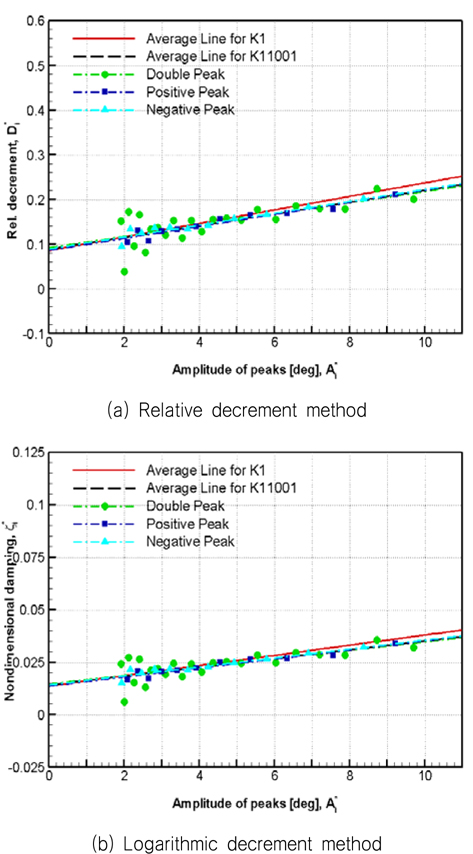
Fig. 3에는 상대감쇠를 도표로 나타내고, 최소 자승법(least-squares method)을 이용하여 데이터 값들로부터 구한 추세선의 예를 보인다. 여기서 는 또는 ,
Fig. 3에서 구한 추세선은 식 (5)와 같이 횡동요 진폭에 대한 1차식으로 나타낼 수 있다.

이렇게 구해진 추세선의 절편

여기서
여기서
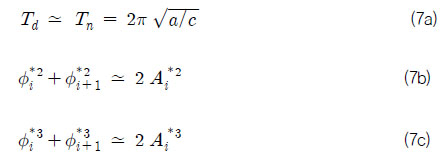
2차 항을 포함하는 감쇠모멘트를 그대로 운동방정식에 사용할 경우 해를 구하기 어려워 식 (6)의 감쇠계수들을 같은 에너지를 소모하는 등가 선형감쇠계수(equivalent linear damping coefficient)

이 등가 선형감쇠계수

식 (8)을 식 (9)로 변환하는 과정에도 식 (7a)의 근사가 사용 되었는데, 이 근사는 횡동요 관련 실용계산에서 흔히 사용된다. 이론상 이므로
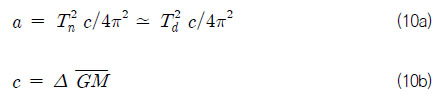
여기서, Δ은 배수량이고 은 횡메타센터 높이이다.
이상으로 횡동요 감쇠실험에서 얻어지는 상대감쇠(relative decrement)를 이용하여 무차원 감쇠계수
앞에서 설명한 상대감쇠법은 최종식이 얻어지기까지 몇 단계의 상대적으로 복잡한 유도과정을 거치며, 그 과정에는 식 (7a)∼(7c)와 같은 근사들이 사용된다. 이와는 다른 접근 방법으로, 대수감쇠(logarithmic decrement)를 이용하여 비교적 간단하게 무차원 감쇠계수를 횡동요 진폭의 1차 함수로 산출할 수 있다. 이 방법은 일종의 물리적 근사로 각 순간의 횡동요 비선형 감쇠과정을 바로 등가의 선형 감쇠에 의한 과정으로 간주하여 동요 구간별 무차원 감쇠계수를 구하며, 이 구간별 무차원 감쇠계수를 회귀분석을 통해 횡동요 진폭의 1차 함수로 표현한다. 이 방법에서는 유도과정에 식 (7a)∼(7c)와 같은 근사를 사용하지 않는다.
대수감쇠(logarithmic decrement)는 다음과 같이 횡동요 감쇠 실험에서
실제의 횡동요 감쇠과정은 비선형 감쇠에 의해 일어나지만 이를 각 순간에서의 등가 선형감쇠에 의해 일어난다고 가정하면, 무차원 등가 선형 감쇠계수 와 대수감쇠 는 잘 알려져 있듯이 다음의 관계를 갖는다 (Kim, 2010).
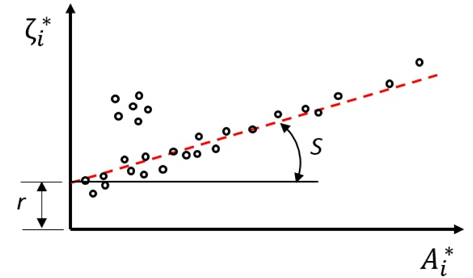
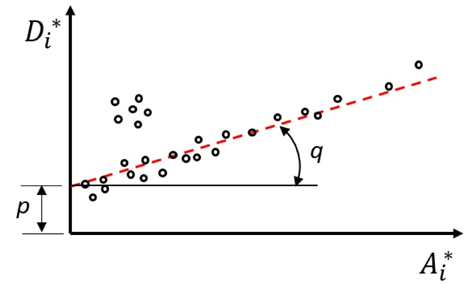
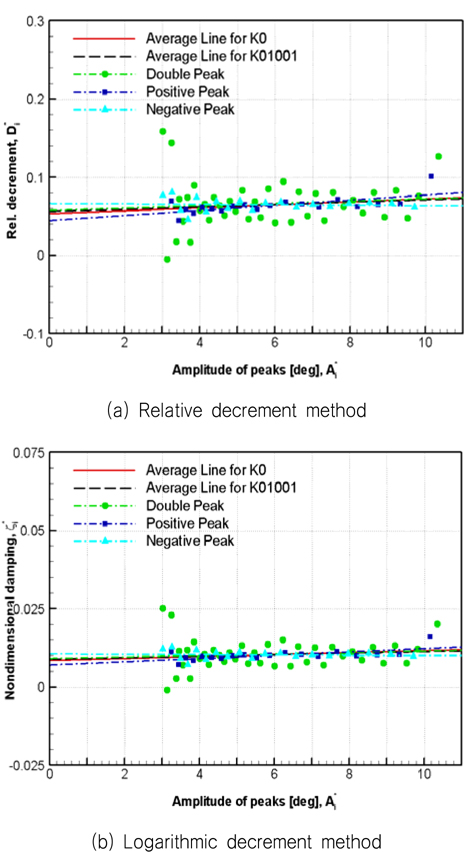
Fig. 4는 횡동요 감쇠실험에서 식 (12)로 계산된 무차원 감쇠계수 값의 도표를 나타내며, 분포된 데이터 값들을 바탕으로 최소자승법을 이용하여 구한 추세선의 예를 보이고 있다.
식 (13)은 Fig. 4에서 구한 추세선의 식을 나타내며, 대수감쇠에 의한 무차원 등가 선형 감쇠계수를 횡동요 진폭의 1차식으로 표현하였다. 추세선의 절편이

여기에서 감쇠계수 는 3가지 피크들에 의한 또는 ,
식 (13)의 가 바로 구하려는 무차원 등가 선형 감쇠계수이고 는 횡동요 진폭

이상으로 대수감쇠법에서 대수감쇠를 이용하여 무차원 감쇠계수
지금까지 설명한 2가지 감쇠계수 산출법 즉 상대감쇠법과 대수감쇠법은 서로 다른 접근법으로 유도된 다른 방법이라고 할 수 있고, 그 결과 값들도 (실용적 관점에서 무시할 수 있는 차이이기는 하지만) 약간의 차이가 있으며 엄밀하게 동일하지는 않다. 현재 횡동요 관련 실무에서는 일반적으로 상대감쇠법이 쓰이고 있으나 앞에서 보았듯이 대수감쇠법이 개념상 더 간단하고 오류의 가능성도 적어 향후 사용이 추천된다. 본 논문에서는 실험결과의 교차확인을 위해 2가지 감쇠계수 산출법을 병행하여 사용할 것을 제안하며, 빌지킬을 장착한 박스형 부유체에 대해 적용예를 보인다.
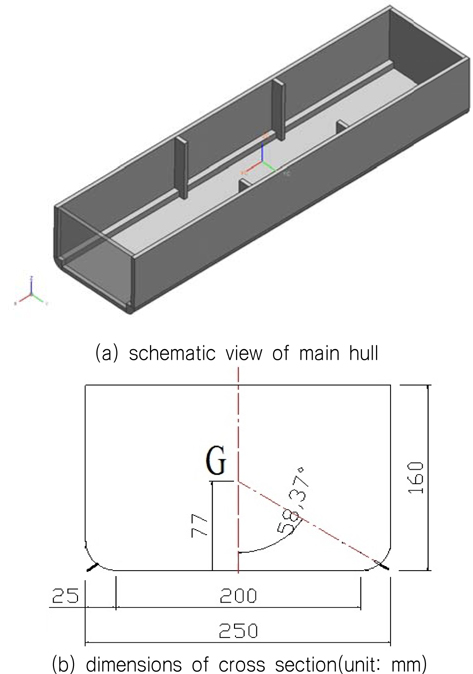
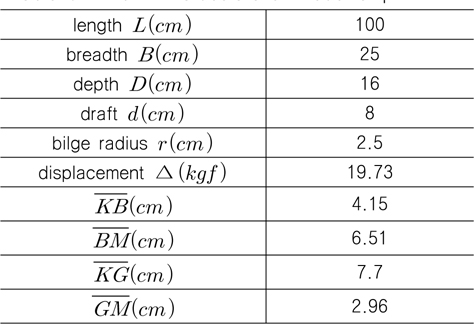
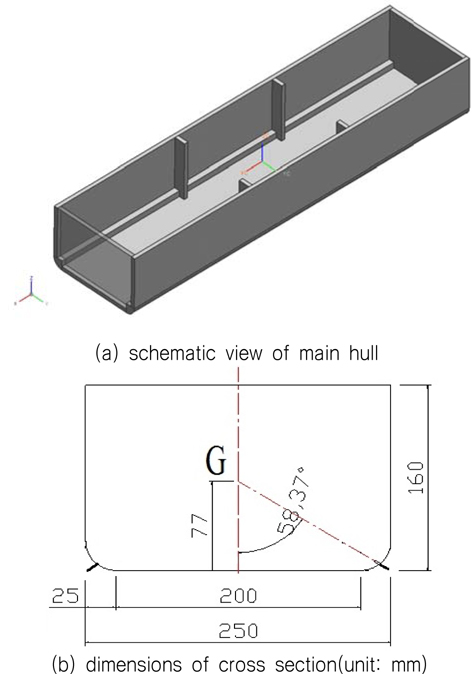
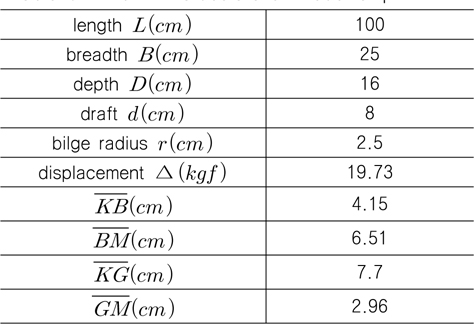
Fig. 5에 보인 실험모형의 본체는 최근 건조된 FPSO의 형태를 참조하여 길이 100 cm, 폭 25 cm, 높이 16 cm의 단순한 박스 형태로 제작하였으며, 둥근 빌지부를 제외한 나머지 외곽부분들은 두께가 1 cm인 아크릴 평판으로 제작하였다. 모형 하부 좌우에 길이방향으로 부착된 빌지부는 빌지킬을 꽂아 장착할 수 있도록 반경이 2.5 cm인 1/4 원형 기둥체로 제작하여 부착하였다. 실험모형의 주요제원은 Table 1과 같으며, 흘수
[Table 1] Principal particulars of model ship
Principal particulars of model ship
빌지킬은 거의 모든 선박이 장착하고 있는 가장 일반적인 횡동요 저감장치이다. 본 연구에서는 빌지킬의 감쇠효과에 대한 기초자료를 확보하기 위해 빌지부에 전형적인 형태로 빌지킬을 설치하되 빌지킬 길이(
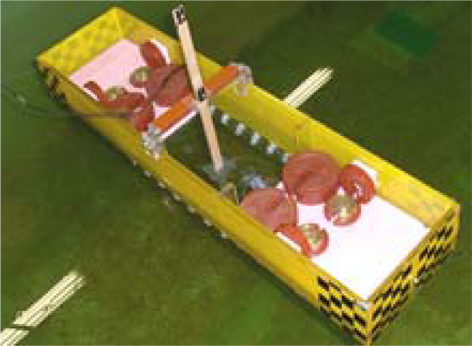
실험은 부경대학교 조파수조(길이 40 m, 폭 2.5 m, 수심 1.3 m)에서 수행되었다. 모형선은 수조 중앙에 전진속도 없이 선수미가 수조 폭 방향을 향하도록 위치시켰고, 계류하지 않고 자유로운 상태에서 실험하였다. 모형선 중앙에 상하방향으로 설치된 2개의 LED 타겟을 이용하여 비접촉식 광학방식으로 횡동요를 계측하였다.
자유 횡동요 감쇠실험을 정확하게 수행하기 위해서는 모형선을 원하는 초기 횡경사각으로 기울이고, 불필요한 외부교란 없이 정수중의 정지상태로부터 극히 짧은 순간에 자유동요가 시작되도록 하는 실험기법을 고안하는 것이 필요하다. 이를 위해 여러방법이 시도되었는데, 모형선 한쪽을 눌렀다가 놓아주는 방법 등은 실제 실행해 보면 정확한 초기 경사각을 주기도 어렵고 의도 하지 않은 교란에 의해 불필요한 운동들이 수반될 수도 있으며, 특히 구속을 순식간에 제거할 수가 없어 실험결과에서 운동의 시작점도 명확히 구분되지 않는 난점들이 있었다. 본 연구에서는 여러 시행착오를 거쳐 선체중앙 현측상단을 절단이 용이한 가는 줄을 사용하여 위쪽으로 매달고 이 줄을 절단하여 자유 횡동요를 시작시키는 방법을 고안하였다. 초기 횡경사각을 미세하게 조정할 수 있도록 줄에 나사식 길이조정 장치도 설치하여 사용하였다. 정확한 실험을 위해서는 초기의 횡경사각 설정이 완료된 후 충분한 시간을 기다려 수면과 모델이 완전히 정지한 상태로부터 실험을 시작하는 것도 중요하다.
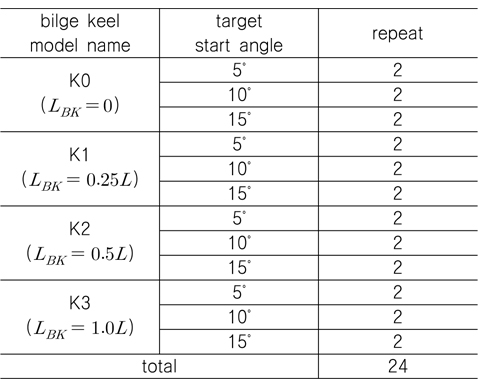
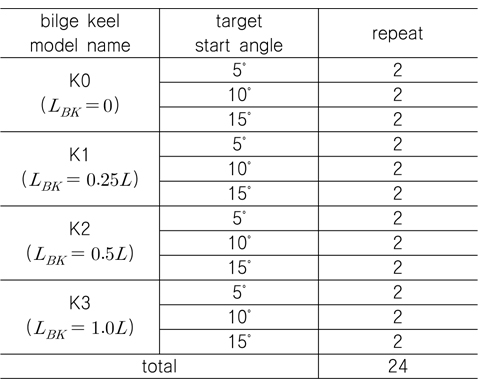
본 논문에서의 자유 횡동요 감쇠실험은 Table 2에서 보듯이 4가지 모델 각각에 대해 목표 초기 경사각을 5˚, 10˚, 15˚로 정하고 2회씩 반복 수행하였으며, 필요한 경우 추가적인 실험을 수행하였다. 다수의 실험을 수행함에 따른 혼란을 피하기 위해 각각의 실험에는 다음의 예와 같이 고유 일련번호를 부여하였다.
[Table 2] Cases of the free roll decay tests
Cases of the free roll decay tests
예) K00501: model(K0) + target start angle(05) + test serial number(01)
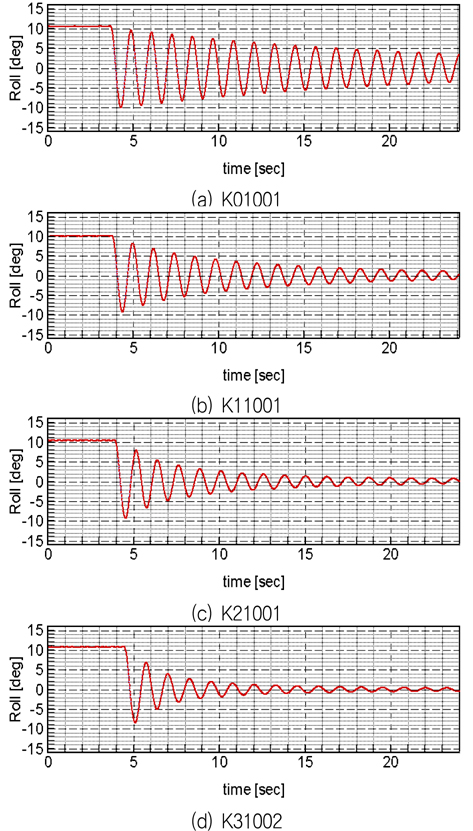
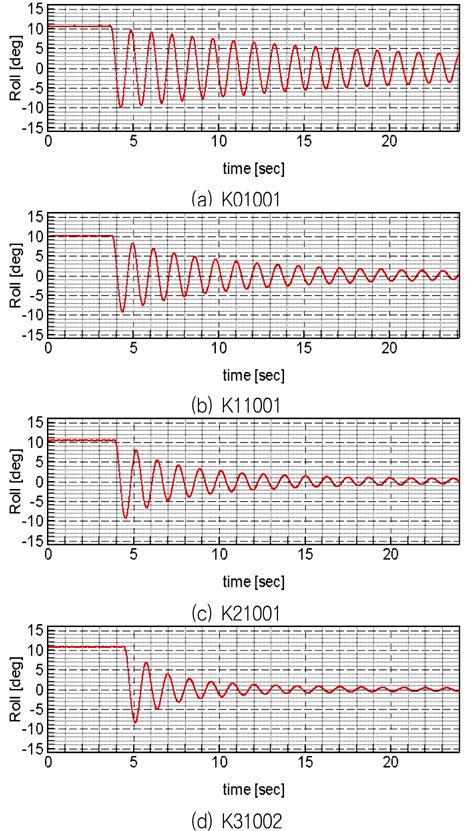
정수상태에서의 자유 횡동요 감쇠실험으로부터 계측된 횡동요의 시간이력 중 각 모델별 한 예를 Fig. 7에 보인다. 상하동요(heave)와 좌우동요(sway) 모두 자유로운 상태이므로 상방향 초기변위에 기인하는 상하동요가 발생하고 횡동요와 연성된 좌우동요도 발생하지만, 이 운동들은 크지 않아 주 관심대상인 횡동요만 보인다. 목표 초기 횡경사각이 10°일 때의 예들이며. 빌지킬 모델 K0∼K3의 계측결과를 (a)∼(d)에 각각 수록하였다. 빌지킬이 없는 모델 K0에서 감쇠가 가장 작아 운동이 가장 서서히 줄어드는 것을 볼 수 있고, 모델 K1, K2, K3로 갈수록 빌지킬의 설치길이가 길어 지고 감쇠가 커져서 운동이 더 빨리 줄어드는 것을 볼 수 있다.
실험들의 수행에 있어 부정확성을 유발할 수 있는 요인들을 최대한 배제하였으므로, 본 논문에서 얻어진 실험결과들은 재현성이 매우 우수하다고 할 수 있다. 향후 관련 CFD 수치해석 결과를 검증하기 위한 벤치마크 데이터로도 활용이 가능할 것으로 기대된다. 참고로 Fig. 7의 예들에서 초기 횡경사각은 모델 K0의 경우 10.67°이고, 모델 K1의 경우 10.19°이며, 모델 K2의 경우 10.24°, 모델 K3의 경우 10.89°이었음을 밝힌다.
자유 횡동요 감쇠실험에서 얻어진 횡동요 시간이력으로부터 상대감쇠법과 대수감쇠법 각각을 이용하여 감쇠계수들을 산출할 수 있다. 상대감쇠법에서는 선형회귀분석을 통해 식 (5)의 절편 p와 기울기 q를 구해야 하고, 대수감쇠법에서는 선형회귀분석을 통해 식 (13)의 절편 r와 기울기 s를 구해야 한다. 선형회귀분석에는 최소자승법 (Press, et al., 1996)을 사용하였다.
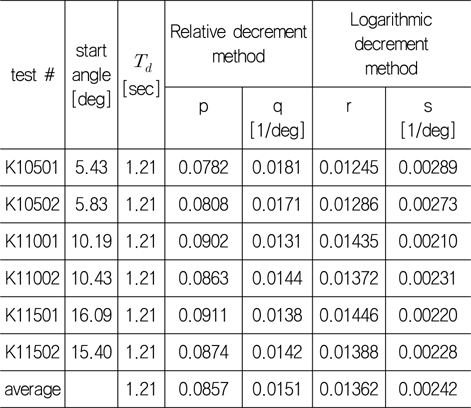
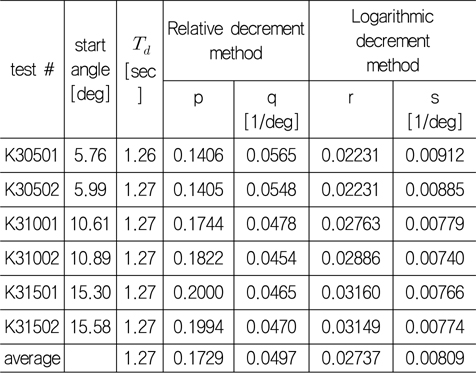
Table 3에는 모델 K0에 대해 목표 초기 횡경사각 5˚, 10˚, 15˚의 3종류별로 2번씩 반복된 6회의 실험결과가 요약되어 있는데, 각 실험번호별로 초기 횡경사각과 동요주기
[Table 3] Summary of the free roll decay tests for model K0
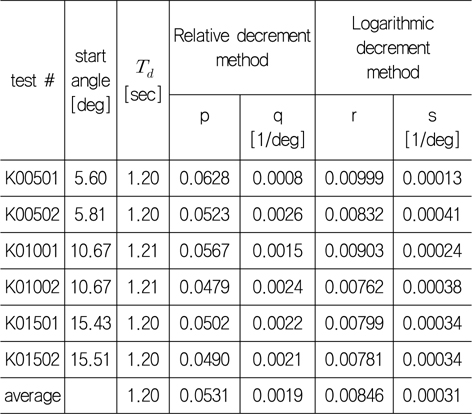
Summary of the free roll decay tests for model K0
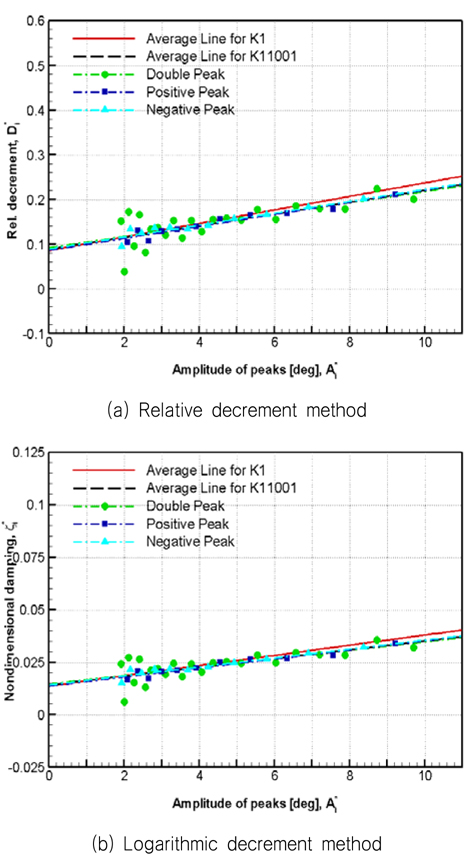
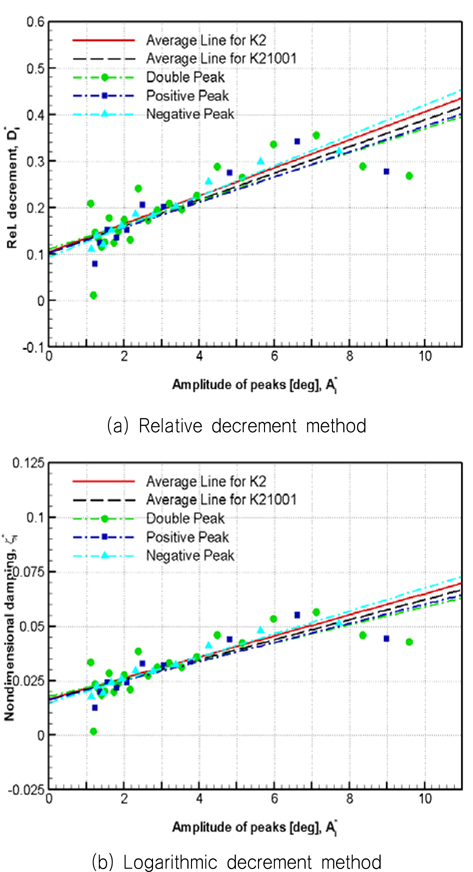
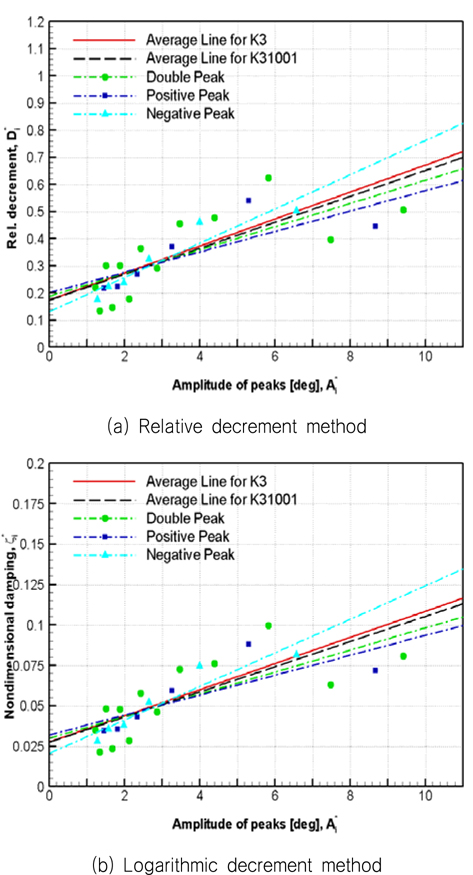
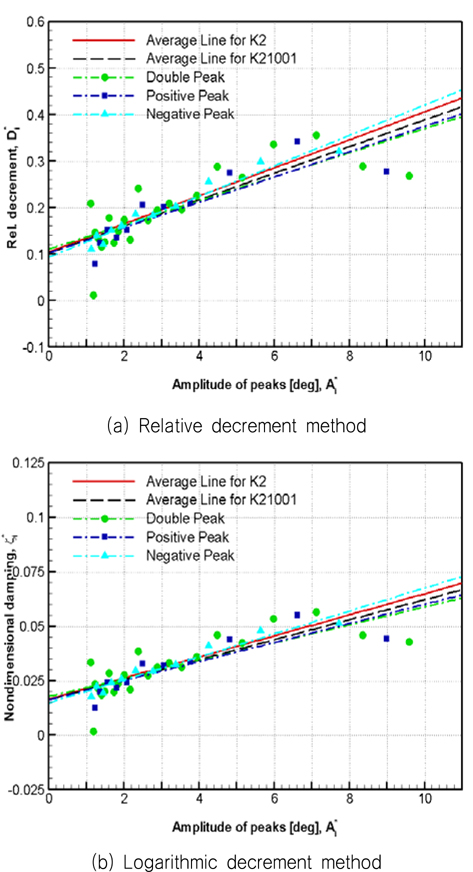
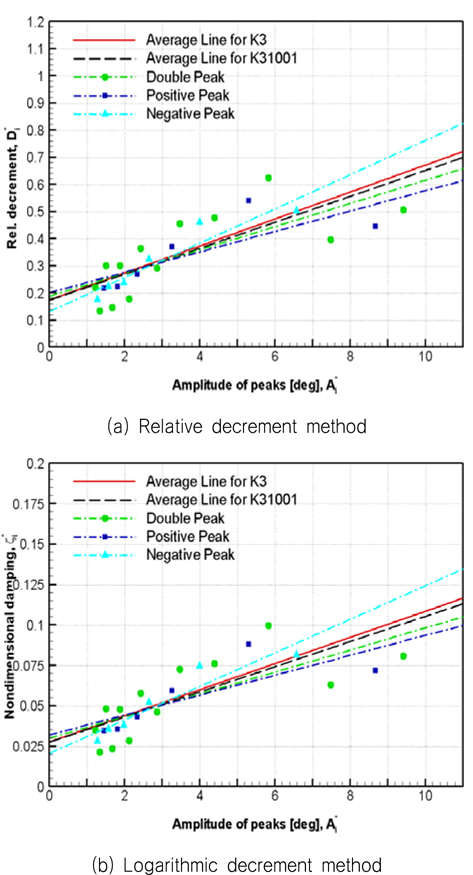
Table 4∼Table 6에는 각각 모델 K1∼K3에 대한 각 6회씩의 감쇠실험 결과가 요약되어 있고, Fig. 9∼Fig.11에는 각각 모델 K1∼K3에 대한 6회 실험 중 하나의 실험을 택하여 회귀분석 결과를 그림으로 보이고 있다. Table 4∼Table 6의 항목 구성은 Table 3과 같고, Fig. 9∼Fig.11의 그림 구성은 Fig. 8과 같다.
[Table 4] Summary of the free roll decay tests for model K1
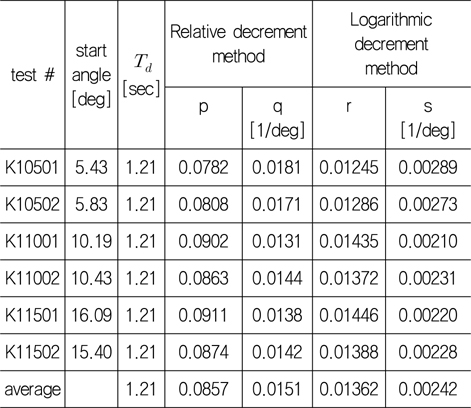
Summary of the free roll decay tests for model K1
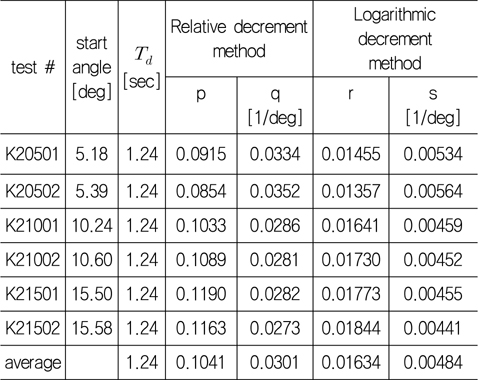
[Table 5] Summary of the free roll decay tests for model K2
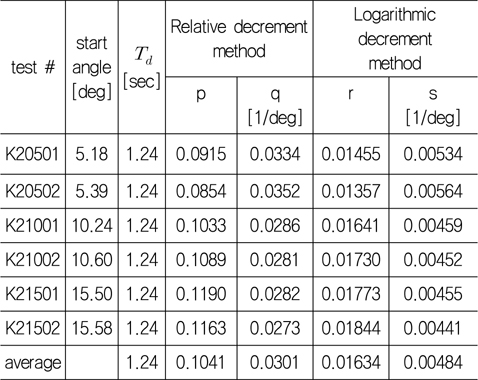
Summary of the free roll decay tests for model K2
[Table 6] Summary of the free roll decay tests for model K3
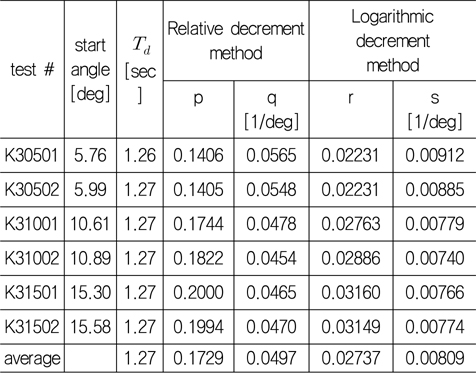
Summary of the free roll decay tests for model K3
본 논문의 제안처럼 감쇠계수 산출에 상대감쇠법과 대수감쇠법을 병행하여 사용하면 교차확인을 통해 오류 발생을 방지할 수 있다. 두 산출법은 유도과정은 다르지만 최종적으로 무차원 감쇠계수를 동일한 형태인 식 (9)와 식 (14)로 나타내므로 같은 실험에 적용할 경우 두 산출법의 절편과 기울기는 근사적으로 다음의 관계를 만족해야 한다.

두 산출법이 서로 다른 접근방법과 근사방법에 의해 유도되므로 식 (15a)와 식 (15b)는 엄밀하게 같아야 하는 관계는 아니고 근사적으로 같아지는 관계를 의미한다. Table 3∼Table 6의 p 와 q, r, s 값들에서 이러한 관계가 잘 만족되고 있음을 확인할 수 있다. 만약 식 (15a)와 식 (15b)의 관계가 지켜지지 않는 경우가 발생하면 오류가 있다고 할 수 있으므로 분석과정을 다시 검토해 봐야 할 것이다.
상대감쇠법의 경우

Table 3∼Table 6에서 절편
Fig. 8∼Fig.11의 그림들에서 4가지 모델 K0∼K3에 대한 회귀분석에서의 경향을 볼 수 있다. 각 그림의 (a)에 보인 상대감쇠법과 (b)에 보인 대수감쇠법을 비교하면 종축 값이 서로 다르면서도 물리적으로 밀접한 상관관계가 있으므로 두 그림의 경향은 매우 유사하다. 모델 K0에서 K3으로 갈수록 추세선의 절편(감쇠의 선형 항)과 기울기(감쇠의 2차 항)가 함께 증가함을 시각적으로 확인할 수 있다. 본 연구의 실험에서는 Table 2에 보인 것처럼 각 조건별로 2회의 실험을 수행하여 재현성을 확인하였는데, 지면관계로 1회의 회귀분석 그림만 수록했지만 동일 조건의 2회 실험에 대한 회귀분석 그림들은 눈으로 차이를 발견하기 어려울 정도로 재현성이 매우 우수했음을 밝혀둔다. 부적절한 실험기법을 사용하거나 선행실험의 잔존파 등에 의한 교란을 방지하지 못할 경우, 데이터의 분산이 심하고 재현성도 약한 실험이 되며 회귀분석 시 절편 값이 음이 되는 등 불합리한 결과를 얻을 수 있으므로 주의할 필요가 있다.
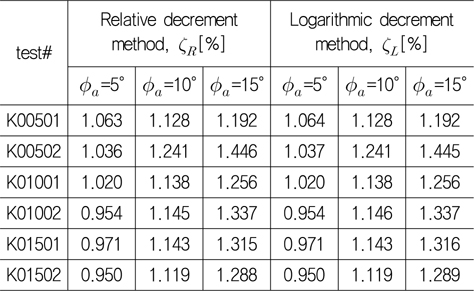
감쇠실험의 회귀분석으로 절편과 기울기를 구한 후 식 (9) 또는 식 (14)로 무차원 감쇠계수 값을 원하는 횡동요 진폭에 대해 계산할 수 있다. 횡동요 진폭
[Table 7] Comparison of the nondimensional damping coefficients for model K0
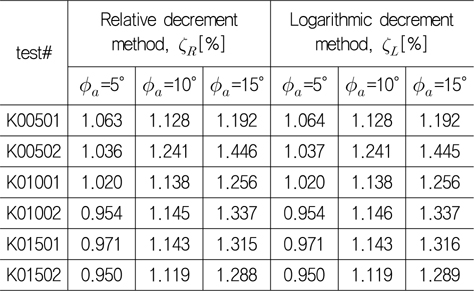
Comparison of the nondimensional damping coefficients for model K0
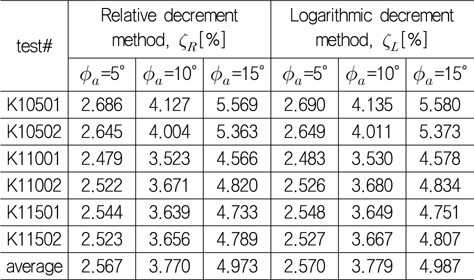
[Table 8] Comparison of the nondimensional damping coefficients for model K1
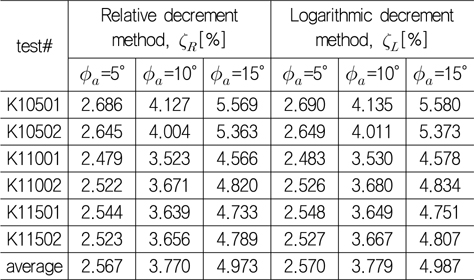
Comparison of the nondimensional damping coefficients for model K1
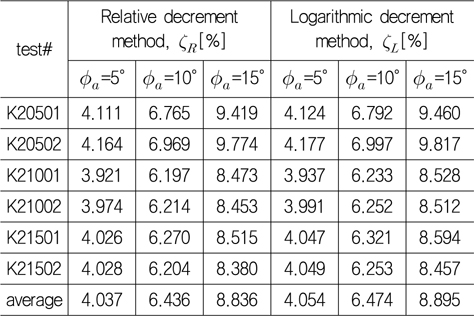
[Table 9] Comparison of the nondimensional damping coefficients for model K2
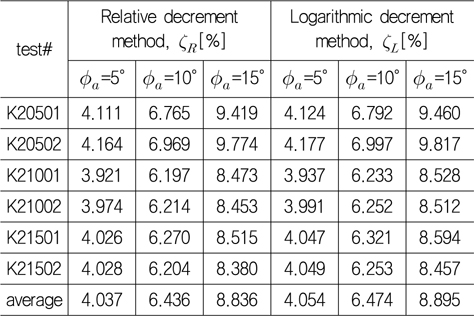
Comparison of the nondimensional damping coefficients for model K2
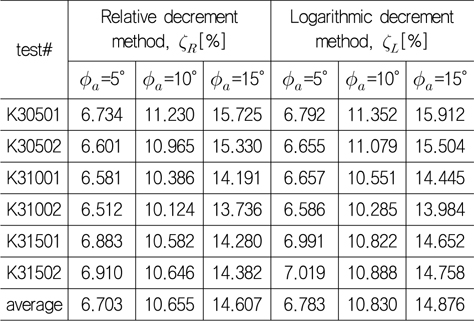
[Table 10] Comparison of the nondimensional damping coefficients for model K3
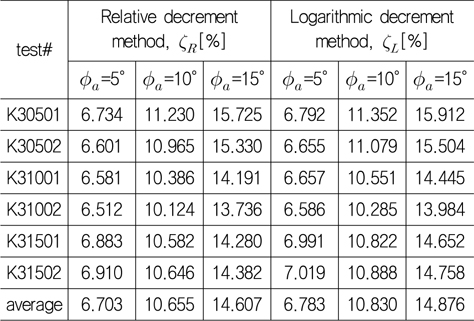
Comparison of the nondimensional damping coefficients for model K3
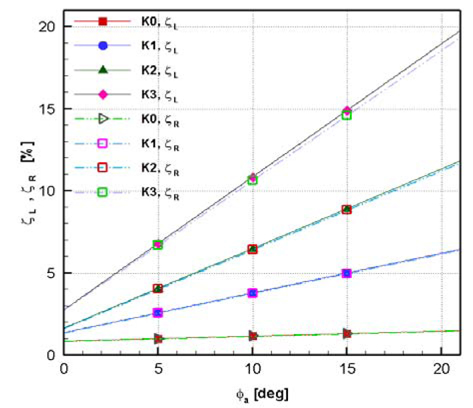
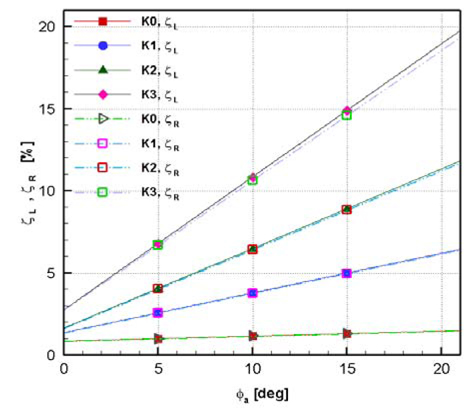
이들 표와 그림에서 상대감쇠법에 의한 무차원 감쇠계수
Table 7 ~ Table 10에서 빌지킬 길이에 따른 감쇠계수의 변화를 살펴보면, 횡동요 진폭
신뢰성 있고 효율적인 감쇠계수 산출법의 정립은 횡동요 관련 실무에서 중요한 의의를 갖는다. 본 논문에서는 횡동요 감쇠실험을 통한 감쇠계수 산출시 신뢰성을 높이기 위해 상대감쇠법과 대수감쇠법을 병행하여 사용할 것을 제안하였다. 빌지킬을 장착한 박스형 부유체를 대상으로 2차 항 감쇠까지를 고려하여 횡동요 감쇠계수를 산출하였고 그 특성을 고찰하였다. 이를 통해 얻어진 주요 결과는 다음과 같다.
- 횡동요 연구에서 일반적으로 사용되어 온 상대감쇠법에 비해 대수감쇠법은 상대적으로 유도과정이 단순하고 계산도 더 간편한 장점이 있다.
- 상대감쇠법과 대수감쇠법에 의한 감쇠계수들은 감쇠가 작은 경우 거의 차이가 없고 감쇠가 큰 경우 약간의 차이가 발생한다. 그 차이는 무차원 감쇠계수(임계감쇠에 대한 비율)의 크기가 15% 정도일 때 0.27%p (상대오차 약 1.8%) 정도로서 크지 않다.
- 상대감쇠법과 대수감쇠법은 서로 다른 접근법으로 유도된 다른 방법이지만, 실용적 관점에서는 거의 같은 횡동요 감쇠계수를 산출한다고 할 수 있다. 따라서 두 산출법을 병행하여 사용하고 그 값들을 교차 확인하면 횡동요 감쇠계수 산출과정의 오류를 방지하는 효과적인 수단이 될 수 있다.
- 수행된 실험에서 빌지킬은 그 크기가 커질수록 횡동요 감쇠계수를 현저히 증가시켜 황동요 저감에 크게 기여함을 정량적으로 확인 할 수 있었고, 빌지킬에 의한 이러한 횡동요 감쇠의 증가는 주로 비선형 2차 항 감쇠의 증가에 기인함도 알 수 있었다.
또한, 본 논문의 실험 수행에 있어 부정확성을 유발할 수 있는 요인들은 최대한 억제하였으므로 얻어진 실험결과들은 재현성이 매우 우수하였다. 향후 관련 CFD 수치해석 결과를 검증하기 위한 벤치마크 데이터로 그 활용이 기대된다.