As good example of potential application-specific requirement, (m,k)-firm real-time streams have been recently introduced to deliver multimedia data efficiently in wireless sensor networks. In addition to stream model, communication protocols to meet specific (m,k)-firm real-time streams have been newly developed or extended from existing protocols. However, since the existing schemes for an (m,k)-firm stream have been proposed under typical flat architecture, the scalability problem remains unsolved when the number of real-time flows increases in the networks. To solve this problem, in this paper, we propose a new clustering scheme for an (m,k)-firm stream. The two different clustering algorithms are performed according to either the (m,k)-firm requirement or the deadline. Simulation results are presented to demonstrate the suitability of the proposed scheme under hierarchical architecture by showing that its performance is acceptable irrespective of the increase in the number of flows.
When it comes to data delivery in wireless sensor networks, real-time communication becomes an important requirement because of the time sensitivity of the sensing data. However, because of the diverse constraints of a node, such as low-power computing, battery operation, and low-data-rate wireless communication within a short range, it is difficult to ensure data delivery within the specified deadline in these networks.
To solve the abovementioned problem, some well-known routing protocols have been proposed to meet the real-time communication requirement. Among them, SPEED [1] and its variants, such as MMSPEED [2] and the real-time fault-tolerant routing protocol called FT-SPEED [3], are the well-known soft real-time routing protocols. These protocols estimate the transmission speed between the current node and the candidate nodes and then, attempt to establish a transmission path with all the relay nodes in order to maintain the desired delivery speed.
In addition to these approaches, recently, new routing protocols that consider both the abovementioned real-time communication requirement and other properties have been proposed. For instance, the real-time power-aware (RTPA) [4] routing protocol supports a real-time application in an energy-efficient manner. Opportunistic real-time routing (ORTR) [5] also takes into account the delivery of data under time constraints with efficient power consumption. Further, the simultaneous attentive energy routing protocol (SAERP) [6], real-time and robust routing protocol (RTRR) [7], and potential-based real-time routing (PRTR) [8] address energy efficiency and other metrics such as robustness. In addition to the abovementioned routing protocols, more research work has been introduced and analyzed in [9]. However, since these routing protocols assume a general requirement for real-time communication, they lack adaptability in a real deployment case since a sensor network is generally deployed to support a specific application. This indicates that a specific routing protocol is desirable to meet each real-time communication requirement.
To solve this problem, application-specific approaches have been proposed.
Good examples for a realistic application in wireless sensor networks are discussed in [10]. In [10], research challenges and issues related to operations are presented. Since the communication protocols are mostly dependent on the application, we need to define the traffic model in advance. However, there has been little research addressing both the traffic model and the communication protocol.
In this paper, we propose various routing protocols for an (
To solve the abovementioned problem, we present a clustering scheme for an (
The rest of this paper is organized as follows: in the following section, we describe the system and traffic models. The clustering scheme is explained in Section III. The simulation results are presented and analyzed in Section IV. Finally, we present the conclusion and briefly discuss the future work in Section V.
A real-time flow, denoted by
We consider a wireless sensor network that consists of randomly deployed sensor nodes over a finite, two-dimensional planar region. We consider that all sensor nodes including a sink are static. Several CHs can be chosen in one geographical area. If the CHs are determined, the corresponding flows are aggregated into one stream and their parameters are configured according to the requirements. A CH is periodically chosen and announced to all nodes in the geographical area.
In order to determine the CH in a distributed manner, a node uses a timer to identify the other node’s value. For the clustering, we consider two new parameters, namely, deadline and (



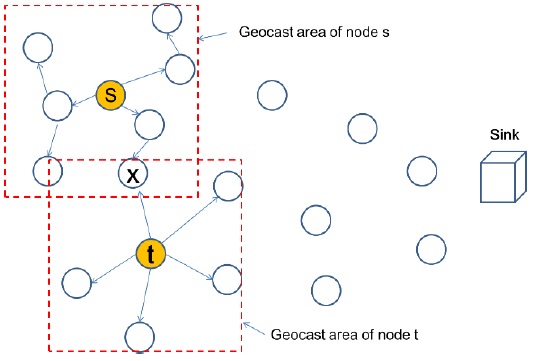
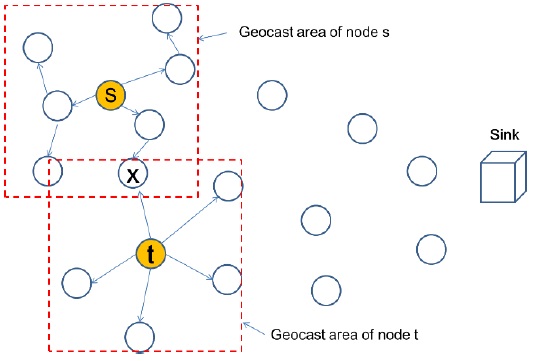
Fig. 1 illustrates the procedure for determining the CH when nodes
Then, they flood the advertisement message in the area. Thereafter, node
>
B. (m,k)-Firm Stream Aggregation
When the CH is determined using the previous steps, the stream aggregation scheme for the (

On the basis of this model, multiple flows are aggregated as a new stream. To build a new composed stream, we need to define a new stream by considering the parameters in each flow. The proposed procedure is performed with two flows. If there are more flows to be aggregated, repeated aggregation is required. For example, if two separate streams,
In other words, as the new aggregated flow should not violate the requirement of the two composing streams,
Upon completing the aggregation, for the delivery of the (
The performance of the proposed scheme is proven by the simulation scenarios. We use ns-2 as the simulator. The simulation terrain is set as a field measuring 200 m × 200 m. The sink is located at the lower-right corner of the field so that the end-to-end hop count ranges from 4 to 9 hops with an average of 6 hops. Each node has a radio range of 40 m. The propagation model is set to a two-ray ground protocol for a physical connection and is set to be wireless-phy in ns-2.
For the application, the deadline for a real-time packet on each node is set to varying values by considering the average link delay and the number of shortest hops. The comparative protocols are presented in my previous work in [12]. For the (
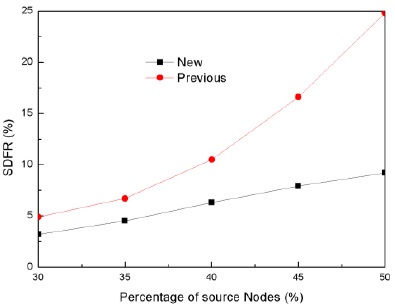
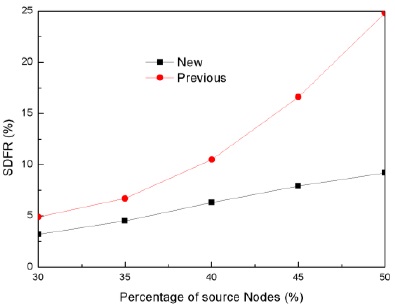
The evaluation result is presented as the stream dynamic failure ratio (SDFR). It refers to the timeliness of an individual packet, which is considered to be the most important feature in a real-time application. For the abovementioned performance parameters, we use two scenarios. First, we increase the number of source nodes with a fixed event period. Second, we have the decreasing event period with a fixed number of source nodes. In both scenarios, we compute the SDFR of all flows and calculate their average.
As shown in Fig. 2, SDFR generally increases with an increase in the number of source nodes where New represents the proposed clustering scheme. A more considerable difference between the two approaches is observed in the case of a large number of source nodes. Since two protocols use the same routing protocol, the difference is mainly attributed to the clustering scheme. As the number of source nodes increases, there is a high probability of cluster formation in the proposed scheme. Therefore, more clusters are created and the aggregated flows reduce the failure probability discussed in my previous work. However, because of the overhead caused by the clustering, a relatively long delay is measured in each round.
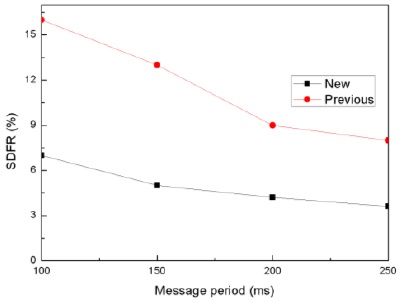
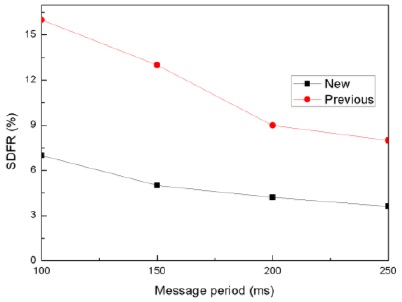
A similar pattern is observed in Fig. 3, which illustrates SDFR according to event period. In the short period, more flows are transmitted by aggregation. Therefore, the failure probability is reduced. However, during the configuration time required to form a cluster, real-time delivery is not available. Therefore, many packets cannot meet the real-time requirement as compared to those in the long message period.
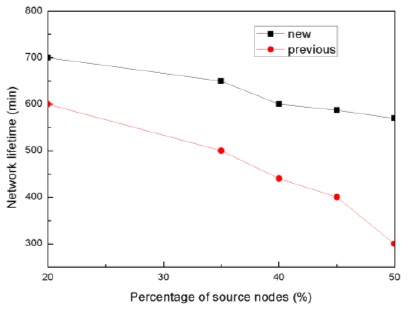
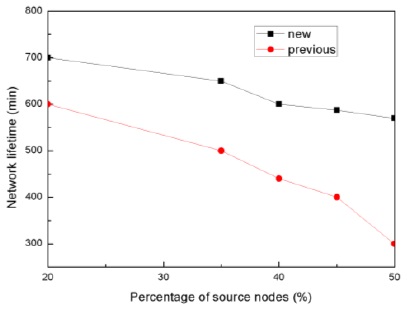
Another simulation result is for the network lifetime, which is defined as the elapsed time until any area is not covered by a sensor node. In other words, it is referred to as the moment when the first hole is created. As the energy model, we adopt the MICAz IEEE 802.15.4 specification model.
As shown in Fig. 4, the network lifetime is largely dependent on the number of sources. However, the network lifetime decreases with an increase in the number of sources. Because of the battery consumption for each flow, the previous scheme is not appropriate for a long operation. However, since the proposed scheme does not take energy consumption into account to determine CH, its network lifetime has to be extended. Further, since aggregation is only accomplished when the (
In this paper, we proposed a clustering scheme for an (
In the future, I intend to consider the energy consumption in order to prevent a specific node from serving CH sequentially when the header is decided. To this end, I intend to develop a more feasible procedure with additional parameters.