This study intended to describe the meaning of child's experience observed through Korean traditional play integrated into R-leaning activity. Participants for this study were 29 children of age five from two classrooms who attended in a kindergarten in a B city. Children participated in the Korean traditional play integrated into R-leaning activity once a week with a total of 12 activities. They experienced irobi and genibo throughout daily life. Data collection for this study were conducted by video recording and teacher journals. The collected data were analyzed using inducive data coding. Results for this study were are follows. First, children who participated in Korean traditional play integrated into robot activity reformed and extended the play. Second, children perceived robot as a partner who supports and completes the play. Third, children actively adopted the robot into Korean traditional play and integrated it into other curriculum areas. Finally, children participated cooperatively traditional song singing using R-learning activity.
현대사회는 과학기술의 발전으로 인해 과학기술의 결정체라 할 수 있는 로봇 관련 기술에 대한 관심이 증가하고 있다. 로봇에 대한 이러한 관심은 최근 들어 우리나라 교육 분야에도 반영되고 있다. 교육과학기술부는 ‘유아교육선진화방안’을 발표하면서 교사보조로봇 등 첨단 기술을 활용한 미래지향적 교육과정 운영을 핵심과제로 추진하였다. 2010년부터 100억 원의 예산을 투입하여 500여대의 로봇을 공급하는 것을 시작으로, 2013년까지 로봇기반교육지원단의 인증을 거친 두 가지 형태의 지능형 로봇인 아이로비큐와 제니보가 유치원 현장에 보급되었으며. 로봇기반교육의 효과를 검증한 연구들이 다양하게 진행되고 있다. 이와 같은 로봇기반교육에 관한 연구는 초기단계에서는 교사의 인식(이정욱 외, 2011)과 로봇이 유아의 학습의 미치는 기초적인 효과를 중심으로 이루어졌다(김경철, 박성덕, 김은정, 2010; 정지현, 박선미, 2010; 현은자, 박현경, 연혜민, 장주연, 2010). 유아교육기관에 아이로비와 제니보와 같은 로봇이 보급되면서 이들 로봇이 유아의 학습에 어떠한 영향을 미치는지에 대한 기초적인 연구들은 언어, 사회‧정서, 신체 등의 영역을 중심으로 시행되었으며 긍정적인 효과가 나타난 것으로 보고되었다. 이들 연구에 의하면, 로봇은 학습을 수동적으로 지원하는 보조수단이 아니라 학습자를 학습의 과정에 참여시키며 학습의 흠미와 몰입을 지속시켜가는 상호작용성 있는 대상으로 분석되었다. 로봇이 유아의 학습에 흥미와 동기를 부여하며 학습의 주도성에 긍정적인 영향을 미친다는 것은 로봇기반교육의 주목할 만한 점이라고 할 수 있다. 로봇은 형식적 혹은 비형식적 상황에서 다양하게 유아들의 참여를 가능하게 하였으며 자유선택활동 시간의 경우 유아들이 함께 어울려 로봇을 중심으로 주도적인 반응을 보이며 로봇을 활용하며 로봇과 함께하는 상호작용성 있는 학습이 가능하였다(신나민, 이선희, 2008). 또한, 로봇은 유아들에게 친금감있고 개방적으로 학습경험을 이끌어 가는 대상으로 인식되었다. 유아들은 로봇을 매개로 하여 또래 유아들과 함께 의견을 나누고 문제를 해결하는 적극적인 행동을 나타냈으며 이러한 과정에서 로봇은 유아들에게 정서적인 지원자이며 사회적 반응을 활성화하는 역할을 하였다(이정욱, 이민정, 안경숙, 임수진, 2011; 지성애, 2011).
이상과 같은 선행연구들은 로봇이 유아교육기관 투입된 이후 로봇의 학습효과를 검증하였으며, 이러한 선행연구를 근거로 로봇을 현재 진행되고 있는 유치원 통합교육과정에 적용하는 연구들이 활발하게 진행되고 있다. 로봇을 활용한 통합활동에 관한 연구는 과학적 소양 및 창의성, 언어상호작용성, 문해성 등에 관한 연구로 다양하게 시행되고 있다. 이들 연구에 의하면 로봇을 활용한 통합활동의 효과는 유아의 학습 능력 향상 뿐만 아니라 타교과영역과의 통합에 있어서 효과적인 것으로 나타났다(김상윤, 이민정, 안경숙, 김정희, 차영숙, 2012; 이연승, 이민정, 강민정, 2014; 이연승, 이민정, 임수진, 2014). 로봇을 활용한 통합활동 연구의 효과를 구체적으로 살펴보면, 유아들이 로봇과 함께 집단적으로 참여하고 의사소통을 하며 문제를 적극적으로 해결해 나가는 특성으로 나타나고 있다. 유아들은 로봇을 학습의 과정에서 자신과 또래, 또래와 또래의 경험과 관계를 쉽게 연결할 수 있게 조력하는 학습의 파트너로 인식하고 있음을 볼 수 있다. 이러한 관점에서 볼 때, 전통놀이를 활용한 로봇 통합활동은 협력적이며 집단적인 학습 경험을 가능하게 하며 놀이의 특성상 유아 학습경험의 주도성과 적극성을 활성화할 수 있는 활동이다. 전통놀이가 갖는 놀의성, 집단성, 협력성 등을 로봇을 활용한 통합활동으로 제시한다면 기존의 선행 연구에서 제시하지 못한 다양한 로봇 통합활동의 특성을 구체적으로 살펴볼 수 있을 것으로 기대된다. 따라서, 본 연구는 R-러닝 로봇을 활용한 전통놀이 실행과정에서 나타나는 유아의 학습경험의 의미를 기술하고자 하였다.
본 연구의 참여자는 B시에 소재한 1개 유치원 만 5세 2개 반 유아들 총 29명이다. 이들 유아들은 주 1회에 40분간 로봇통합 활동으로 계획된 전통놀이 활동에 참여하였다. 이들 유아들의 반에는 제니보와 아이로비를 각각 1대씩 비치하였다. 유아들은 주 1회 40분 동안 체계적으로 준비된 전통놀이에 관한 로봇 통합활동을 경험할 뿐만 아니라 자유선택활동 등에서 자연스럽게 아이로비와 제니보와 친숙해 질 수 있도록 환경을 제시하였다.
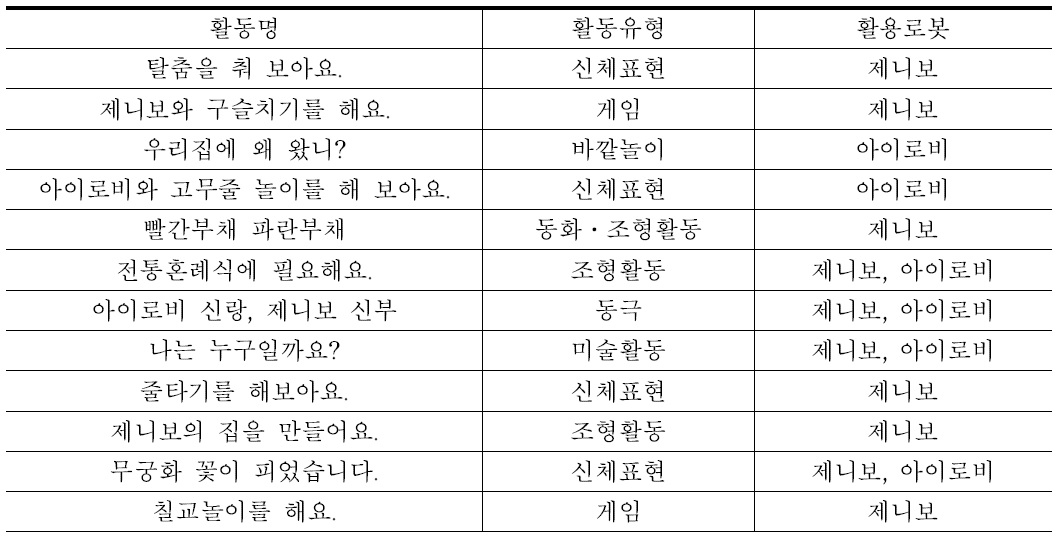
본 연구는 총 12주간 진행되었으며 아이로비와 제니보를 활용한 전통놀이 통합활동을 주 1회 40분 동안 활동을 제공하였다. 유아들이 제니보와 아이로비의 기능적 특성이나 활용에 친숙해 질 수 있도록 하루일과를 통해 등원, 자유선택활동, 음률활동 등에서 자연스럽게 로봇을 활용하고 접할 수 있도록 환경을 구성하였고 로봇에 관한 연관경험을 제공하였다. 로봇을 활용한 전통놀이 통합활동을 제공하기 위해 전통놀이와 관련된 활동(예: 놀이/게임, 동요, 신체표현, 조형, 동극 등)을 포함하였으며 로봇의 기능 및 특성을 반영할 수 있도록 하였다. 구체적인 활동명과 내용은 다음의 표 1과 같다.
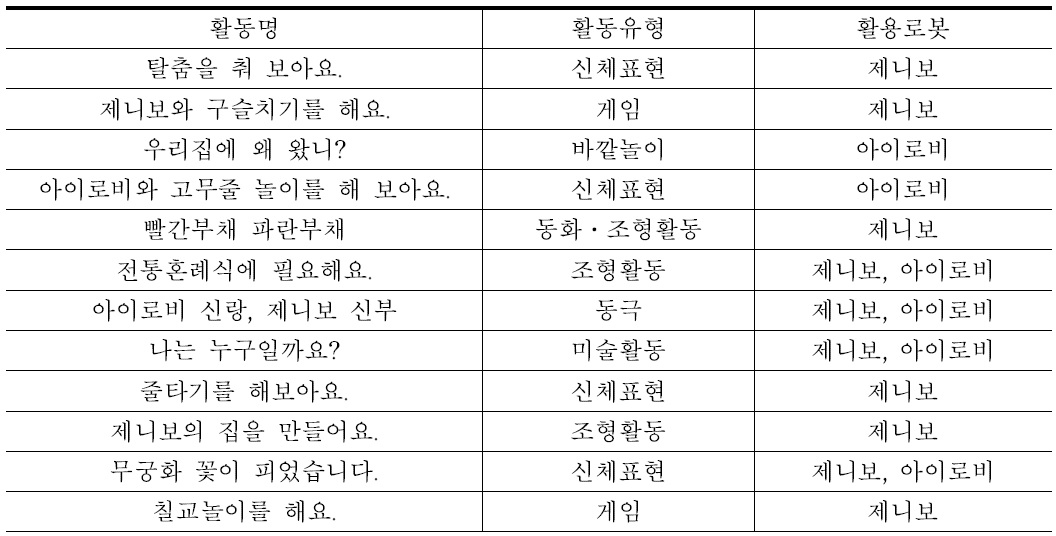
로븟을 활용한 전통놀이 통합활동 내용
가. 수업관찰
수업관찰은 총 12주간 12회 이루어졌다. 1회 수업관찰 소요시간은 평균 40분 정도이며, 모든 활동은 비디오로 촬영하였으며, 간혹 수업시간이 길어지거나 교사-유아의 상호작용이 많은 활동의 경우 부분적으로 동영상을 촬영하거나 사진 촬영할 수 있도록 사전 동의를 얻었다.
나. 교사저널
R-러닝 로봇을 활용한 전통놀이에 참여한 유아교사 2인은 로봇을 활용한 전통놀이 통합 활동에 참여하는 동안 유아들의 활동의 과정에서 발견하는 변화를 반성적 저널을 통해 기술하도록 하였다. 교사들은 주 1회 총 12회의 로봇을 활용한 전통놀이 통합활동을 실시하였으며 활동의 사후에 각각의 활동에 대한 반성적 저널기록을 통해 전통놀이의 특성, 로봇 통합활동의 특성, 유아의 경험의 특성 등에 관한 변화를 반성적 저널에 자유롭게 기술하도록 하였다.
녹화된 12회기 분량의 비디오 테이프는 모두 전사화되었으며 전사화 과정은 최초 ‘처음보기’를 통해 의미단위가 포함된 비디오 장면을 중심으로 집중 전사화되었다. 또한, 수집된 교사의 저널은 최초 읽기를 통해 연구의 목적에 부한한 의미단위를 단어와 문장중심으로 범주화하였다. 초기의 의미단위를 중심으로 선정된 전사화 자료들은 유아의 의미있는 학습 경험을 중심으로 10-12개로 범주화되었으며, 주제선정을 위해 최종 4개로 주제화되었다.
유아들에게 로봇은 자신을 개방하고 정서를 교감할 수 있는 친근한 대상이었으며 전통놀이는 유아의 자발적이며 협력적 참여를 가능하게 하였다. 이러한 로봇과 전통놀이의 장점은 로봇을 활용한 전통놀이 통합활동을 통해 자연스럽게 나타났다. 로봇의 친근성과 전통놀이의 재미는 유아들이 R-러닝 로봇을 활용한 전통놀이 통합활동에서 전통놀이를 변형하고 확장하도록 하였다.
유아들은 로봇이라는 새로운 대상을 이미 익숙한 전통놀이인 구슬치기 활동을 통해 적극적으로 수용하고 활용하였다. 구슬치기 놀이는 유아들에게 익숙하고 쉽고 재미있는 놀이였으며 이러한 경험의 친숙함은 로봇이라는 새로운 대상을 유아들의 학습경험에 수용하고 적용하는데 연계하는 역할을 하였다.
제니보라는 로봇의 기능과 특성을 반영하여 유아들은 구슬치기 활동을 변형하고 확장하기 위해 노력하였다. 구체적으로 유아들은 구슬치기의 익숙한 경험에 새롭게 초대된 제니보라는 대상과 협력하기 위해 구슬치는 방법을 손대신 제니보의 다리로 제안하였으며 구슬의 크기도 작은 것으로 교체하였다. 또한, 제니보의 움직임의 방향을 조정하면서 놀이를 지속하고 확장해 나갔다. 요컨대, 유아들은 제니보의 기능과 움직임의 특성을 이해하였으며 이를 전통놀이인 구슬치기에 새롭게 적용하기 위해 놀이의 방법과 도구 등을 변형하고 확장하기 위해 서로 의견을 교환하면서 놀이를 확장해 나갔다. 구체적인 사례는 예1, 2와 같다.
유아들은 로봇을 활용한 전통놀이 과정에서 로봇을 놀이를 지지해 주고 완성해 주는 놀이의 한 구성원으로 인식하였다. 로봇을 활용한 전통놀이는 기존에 유아들이 경험한 전통놀이와는 달리 로봇이라는 새로운 대상이 전통놀이의 과정에 참여하고 함께 놀이를 전개해 나가는 것을 의미한다. 따라서 이 과정에서 유아들은 전통놀이 장면에 제시된 아이로비 혹은 제니보와 함께 어떻게 놀이를 지속하고 완성할 것인가에 대해 적극적으로 반응하였다. 전통놀이는 유아들에게 로봇이라는 대상과 상관없이 너무나 재미있고 역동적인 놀이 경험이다. 그러나, 로봇과 함께 하는 전통놀이 경험에서 로봇이라는 대상에 대한 기능과 특성을 이해하고 이를 바탕으로 놀이의 파트너로 다양하게 로봇을 전통놀이 과정에 참여하게 하는 것은 유아들에게 의미있는 사건이다.
본 연구결과에 의하면 유아들은 전통놀이 중 고무줄 놀이과정에서 아이로비를 놀이를 지원해 주는 의미있는 대상으로 인식하였다. 고무줄 놀이를 지속하고 완성하려면 고무줄을 지지해 주는 대상이 요구되며 놀이를 지속하고 완성해 가는데 중요한 놀이요를 불러주는 대상이 필요하였다. 본 연구에서 유아들은 아이로비를 고무줄을 잡아 주는 대상, 놀이에서 노래를 들려주는 대상으로 활용하였다. 유아들은 고무줄 놀이를 시작해서 마치는 순간까지 아이로비가 유아의 고무줄 놀이의 조력자이면서 지지자로서 인식하는 것을 볼 수 있다. 구체적인 사례는 예 3,4와 같다.
본 연구에서 전통놀이라는 재미있는 친숙한 놀이 경험은 로봇을 활용하면서 새롭고 다양하게 확장되어 갔다. 로봇은 유아들에게 상호 작용성 있는 대상으로서 유아가 자신의 경험을 자유롭게 제시하고 또래간의 의사소통을 활성화하는데 긍정적인 역할을 한다. 이러한 로봇의 특성과 전통놀이 경험의 재미와 친근성은 새롭게 제시되는 경험을 수용하고 변형하고 확장가능하게 하였다. 즉, 로봇을 활용한 전통놀이 통합활동에 참여한 유아들은 로봇을 유아들과 동일한 놀이 파트너로 인식함에 따라 타교과 경험과 연계하고 통합하여 전통놀이를 확장하였다.
예컨대, 유아들은 아이로비와 제니보에게 씌워 줄 족두리를 꾸미기 위해 각자의 방식대로 다양한 재료를 선택하고 족두리를 독특하게 꾸며갔다. 이러한 과정에서 족두리에 대한 유아의 이해는 다양하고 새로운 방식으로 족두리를 꾸미는 활동으로 나타났으며, 완성된 족두리를 유아들의 놀이 파트너이며 친구인 아이로비와 제니보에게 보여 주기 위해 주도적으로 활동에 참여하였다. 족두리 만들기와 제니보에게 족두리 씌워주기 활동은 유아들의 전통놀이 경험과 로봇활동을 연계시킬 뿐만 아니라, 조형활동 영역에 대한 창의적이고 미적인 체험을 가능하게 하였다. 구체적인 사례는 예 5, 6과 같다.
전통놀이의 대표적인 영역 중의 하나가 전래동요이며, 전래동요의 가장 주목할 만한 특성은 집단성과 협력성이다. 로봇활동과 전통놀이의 공통점은 활동의 과정에서 유아들의 흥미, 재미, 자발성, 협력성을 가능하게 한다는 점이다. 전래동요는 집단요와 게임의 특성을 동시에 나타나면서 공동체적인 놀이의 협력과 완성을 요구한다. 즉, 유아들이 로봇을 또래 유아들과 동일한 놀이의 대상으로 인식하고 수용할 때 로봇을 활용한 전래동요 활동이 활성화 가능한 것이다.
유아들은 로봇을 활용한 전통놀이 과정에서 제니보를 활용한 전래동요의 함께 부르기, 매겨서 부르기 등의 집단요의 경험에 참여하였다. 전래동요의 반복성과 후렴구의 창의적 즉흥구 만들어 부르기는 제니보와 함께 전래동요 부르는 활동에서 유아들이 집단적으로 함께 노래부르는 활동으로 지속되었다. 유아들은 제니보가 들려주는 댓구의 노래 소리에 집중하였으며 반응적으로 합창함으로 노래부르기를 완성하였다. 또한, 집단적인 전래 동요부르기 활동 후 집단요와 집단적인 게임형태로 유아들의 활동이 확장되었다. 이러한 전통놀이 과정에서 로봇은 유아들의 집단적 놀이경험을 지속하고 다른 전통놀이로 확장되는 연계 역할을 하였다.
본 연구는 로봇을 활용한 전통놀이 실행과정에 참여한 유아들의 변화를 의미를 중심으로 기술하고자 하였으며 논의 및 결론은 다음과 같다.
첫째, 로봇을 활용한 전통놀이 실행과정에서 유아들은 로봇을 전통놀이를 함께 수행하는 대상으로 인식하였으며 이러한 로봇에 대한 친근성과 상호작용성은 유아들이 기존의 전통놀이 규칙과 방법을 로봇에게 적합하게 변형하게 함으로써 전통놀이를 확장하게 하였다. 이러한 본 연구의 결과는 로봇을 활용한 통합활동에 참여한 유아들이 로봇과의 상호작용성으로 인하여 학습의 주도성, 적극성이 향상되었으며 창의적으로 활동 방법을 모색하고 적용한다는 연구결과와 유사하였다(김상윤 외, 2012; 이연승 외, 2014). 유아들에게 로봇은 전통놀이에 참여하는 동일한 대상이었으며 유아들은 로봇이 전통놀이 과정에 효율적으로 참여할 수 있는 방법을 모색하기 위해 의사소통하였으며 놀이를 적극적으로 변형하며 확장하였다. 이러한 연구결과는 로봇이 갖는 상호작용성과 친근성이 유아들에게 학습참여의 적극성, 학습과제 수행의 주도성을 줄 수 있음을 시사한다.
둘째, 유아들에게 로봇과 전통놀이는 흥미를 지속하고 놀이를 완성가능하도록 하는 긍정적인 역할을 하였다. 로봇과 함께 전통놀이를 수행하고 완성하기 위해 유아들은 로봇을 전통놀이 과정에 놀이 지지자와 협력자로서 적극적으로 활용하였다. 유아들에게 로봇은 자신의 생각과 정서를 교류하고 상호작용가능한 대상으로 인식되었으며 이러한 로봇에 대한 긍정적 인식은 전통놀이라는 경험의 장면에 로봇의 기능과 특성에 맞게 로봇을 활용하고자 하는 유아들의 인식으로 나타났다. 놀이의 특성에 따라 로봇이 어떻게 참여할 수 있는지에 대한 유아들의 의사소통이 나타났으며 놀이를 완성하기 위해 로봇의 역할을 다양하게 활용하였다. 이러한 본 연구의 결과는 유아들은 로봇과 함께 하는 활동과정에서 언어적 상호작용성과 의사소통능력이 활발하게 나타나며 활동의 지속성과 수행정도가 높다는 연구결과를 반영하였다(김상윤 외, 2012; 이정욱 외, 2011; 정지현, 박선미, 2010).
셋째, 로봇을 활용한 전통놀이 실행과정에서 유아들은 로봇과 전통놀이에 대한 경험에 단편적으로 참여하는 것이 아니라 로봇을 전통놀이에 수용하기 위해 타교과 영역과의 통합적 경험을 하는 것으로 나타났다. 유아들은 로봇이라는 새로운 대상과 함께 전통놀이에 참여하기 위해 전통놀이를 변형하고 확장할 뿐만 아니라, 타교과 영역의 활동(예: 조형 등)을 연계하여 로봇을 전통놀이 경험에 통합하였다. 유아들은 친근하고 익숙한 대상이며 경험인 로봇과 전통놀이를 또 다른 활동 영역과 연계하여 활용하므로써 로봇과 전통놀이 경험의 통합성을 나타냈다. 이러한 본 연구의 결과는 로봇을 활용한 통합활동이 유아가 기존 경험을 새로운 경험의 통합에 적극적으로 반영한다는 연구결과를 반영하였다(김상윤 외, 2012; 이정욱 외, 2011). 로봇과 전통놀이 경험은 또 다른 학습 활동과의 연계 및 통합을 가능하게 하는 연계적 역할을 하는 조력하는 것으로써 향후 관련 후속연구를 통해 통합이 가능한 다양한 영역 및 활동에 대한 탐색이 요구된다.
넷째, 로봇과 전통놀이의 가장 큰 공통점은 유아들의 집단성, 협력성이라고 할 수 있다. 로봇을 매개로 유아들은 자연스럽게 함께 모여 로봇을 중심으로 의사소통을 하게 되며 전통놀이 또한 유아들이 함께 놀이를 실행하게 하는 특성을 갖는다. 이러한 로봇과 전통놀이의 공통점은 로봇을 활용한 전통놀이 실행과정에서 재미와 참여도가 최적화된 것으로 해석된다. 즉, 전래동요를 함께 부르면서 게임을 하는 과정에 로봇도 함께 놀이를 들려주거나 부르며 놀이를 확장해 나가는 역할을 하였다. 이와 같은 본 연구의 결과는 로봇을 활용한 통합활동에서 유아들이 의사소통에 적극적으로 참여하여 협력하여 문제를 해결하고 대안을 발견하는데 주도적이라는 선행연구를 반영하였다(김상윤 외, 2012; 이연승 외, 2014). 유아들이 함께 협력하여 재미와 흥미를 유지하면서 과제를 지속하고 확장하는 것은 의미있는 경험이다. 로봇은 유아들에게 함께 활동을 수행할 수 있는 친근성과 유대감을 형성하는 역할을 하였다. 또한, 전통놀이는 새롭게 제시된 대상인 로봇이 유아들과 함께 전통놀이에 몰입하여 과제를 수행할 수 있는 쉽고 익숙한 놀이의 상황을 제공하였다. 이러한 로봇과 전통놀이의 긍정적 측면은 유아들이 협력적으로 과제를 수행하고 확장가능하게 하였다.