본 논문은 r-러닝 로봇통합 활동에 참여한 유아들의 로봇활용 다면적 능력을 조사하고자 하였다. 본 연구대상은 K시와 P시에 소재한 총 2개 유치원의 만5세 2개 학급 총 40명의 유아들이다. K시에 소재한 1개 유치원 만5세 유아들은 실험집단으로 P시에 소재한 1개 유치원 만5세 유아들은 비교집단으로 선정하였다. 실험집단 유아들은 총 12회 동안 아이로비와 제니보를 활용한 r-러닝 통합활동에 참여하였으며, 비교집단 유아들은 주제중심 통합활동에 참여하면서 자유선택활동 시간을 활용하여 아이로비와 제비로를 활용하도록 하였다. 본 연구결과는 간략하게 요약하면 다음과 같다. 첫째, r-러닝 통합활동에 참여한 유아들의 로봇활용 다면적 능력은 비교집단에 비해 향상되었다. 둘째, r-러닝 통합 활동에 참여한 유아들의 로봇활용 다면적 능력은 로봇지식 활용, 로봇기능 활용, 로봇활동 수행 및 완성, 로봇활동 지속성 등에서 의미있게 향상되었으며, 또래로봇활용 능력에서는 향상되지 않았다.
This study intends to examine child's multi-faceted ability of robot in r-learning integrative activity. Subjects for this study were 40 children of age 5 from two kindergarten in K and P city. Children of age five from a kindergarten in K City were assigned as experimental group and children from a kindergarten in P city were assigned as comparative group. Experimental group participated in r-leaning integrative activity of a total of 12 using i-robii and genibo. Comparison group participated in theme based integrative activity using irobi and genibo during free play activity time. Brief results for this study are as follows. First, in overall child's multi-faceted ability of robot was improved. Second, child's multi-faceted ability of robot was significantly different in the area of robot related knowledge, robot related function, peer robot related cooperation, robot task completion, and robot task sustain ability.
현대사회의 과학과 기술의 발달은 로봇과 뇌과학 연구를 통해 지속적으로 확장되고 있다. 21세기 현대사회에서 로봇과 인간은 상호작용성을 바탕으로 의사소통해 나갈 수 있는 동반자로 인식되고 있다. 이러한 로봇에 대한 시대‧문화적 요청은 유아교육현장에서도 로봇관련 연구를 통해 다양하게 이루어지고 있다.
유아교육선진화 사업의 일환으로 제니보와 아이로비와 같은 로봇이 유아교육현장에 보급된 이후 유아교육현장에 로봇을 수용하고 통합하는 방안에 대한 연구들이 교사, 유아를 중심으로 활발하게 진행되었다(이정욱 외, 2010; 이정욱 외, 2011; 지성애 외, 2011). 이러한 연구들을 근거로 로봇적용의 관심은 현재 유아교육현장의 주제 중심 통합활동의 맥락에 r-러닝 통합방안을 다각적으로 모색하는데 있다.
기존 선행연구들이 제시한 r-러닝 통합활동에 관한 연구들은 r-러닝 통합활동에 참여한 유아들의 언어능력, 사회정서 능력 등과 같은 발달영역 중심으로 효과를 제시하였다(김영실, 김나림, 변윤희, 2011; 지성애 외, 2011). 또한, r-러닝 통합활동의 효과를 발달 영역 중심에서 과학적 능력, 창의성, 언어상호작용성, 문해성 등과 같은 다양한 영역으로 확장하여 제시하였다(김상윤 외, 2012; 이연승, 이민정, 강민정, 2014; 이연승, 이민정, 임수진, 2014). 이들 선행연구는 유아교육현장에 로봇이 단순하게 제시된 매체가 아니라 r-러닝 통합활동이라는 경험으로 구축되면서 로봇을 통한 유아 경험의 확장과 다양화를 의미있게 제시하였다. 즉, 유아들은 r-러닝 통합활동이라는 새롭게 구축된 교육 생태계적 환경 속에서 로봇을 통한 혹은 로봇과 함께 하는 경험을 통해 발달영역에서 주목할 수 있는 효과 뿐만 아니라 포괄적 범위의 의사소통 능력과 창의성을 향상시키는 흥미로운 결과를 도출하였다. 이러한 최근 연구동향에 의하면 r-러닝 통합활동에 참여한 유아들의 변화가 새롭게 조명되고 있다. R-러닝 통합활동에 참여한 유아들은 로봇을 그들의 활동과정에 과제를 함께 수행하고 완성하기 위해 조력하고 협력해야 할 대상으로 인식하는 것으로 나타났다(김상윤 외, 2012;이연승,이민정,강민정,2014;이연승,이민정,임수진,2014). 유아들은 로봇을 지식과 기능으로 조작하고 기계적으로 활용해야 하는 객체가 아니라 이해하고 알아가고 함께해야 할 대상으로 인식하였다. 유아들은 로봇을 상호작용성 있는 대상으로 인식하였으며 로봇에 대한 지식과 기능에 대한 적극적인 활용은 로봇의 특성을 이해하려는 친근성에 기인하는 것으로 분석할 수 있다(김상윤 외, 2012; 이연승, 이민정, 강민정, 2014; 이연승, 이민정, 임수진, 2014; 이민정, 이해정, 2015).
R-러닝 통합활동 효과 연구에 의하면 유아들은 r-러닝 통합활동 과정에서 적극적으로 참여하기, 또래와 협력하기, 문제해결을 위한 의사소통하기 등의 공통적인 특성을 보여주었다(김상윤 외, 2012; 이연승, 이민정, 강민정, 2014; 이연승, 이민정, 임수진, 2014; 이민정, 이해정, 2015). R-러닝 활동은 로봇을 통한 또래간의 활발한 의사소통과 주도적이고 자발적인 참여를 가능하게 하였다. 로봇이라는 상호작용성 있는 매개체는 유아-유아간의 의사소통과 협력의 연계성을 제공해 주었다. 유아들 모두에게 공통적으로 매력적이며 관심있는 대상인 로봇은 활동을 지속하고 완성하는 과정에서 유아들이 자발적으로 참여하며 문제상황을 해결할 수 있는 다양한 방안을 적극적으로 제안하도록 하였다. 즉, r-러닝 통합활동은 로봇을 매개로 유아들의 협력적 관계, 의사소통, 자발적 참여 등의 다면적 능력을 향상시킬 수 있었다. 뿐만 아니라, r-러닝 통합활동 과정에서 유아들은 로봇이라는 친근한 대상이 과제를 완성하는데 필요한 로봇에 관한 지식과 기능을 적극적으로 사용하였다. R-러닝 통합활동에 참여한 유아의 기능적, 사회적 문해성에 관한 연구(2014)에서 제시한 바와 같이 r-러닝 통합활동에 참여한 유아들은 로봇에 관한 지식과 기술이라는 기능적 능력을 이해하고 활용할 뿐만 아니라, 이러한 기능적 능력을 유아들에게 제시된 문제 상황을 해결하기 위해 적절하게 적용하였다.
요컨대, r-러닝 통합활동에 참여한 유아들은 로봇에 관한 기능적 지식과 기술 사용 뿐만 아니라 r-러닝 통합활동이라는 새롭게 구축된 생태환경 속에서 과제를 완성하기 위해 다양하게 요구되는 다면적 능력을 발현하게 된다. R-러닝 통합활동은 유아들에게 로봇을 활용하여 제시된 활동 혹은 과제를 수행하고 완성하기 위해 r-러닝을 둘러싼 환경을 최적화하기 위해 다면적 능력을 요구하게 된다. 이러한 다면적 능력은 로봇에 관한 지식, 기술, 또래와의 협력, 과제 수행 및 완성, 활동의 지속성 등과 같은 능력과 연관된다고 하겠다(김상윤 외, 2012; 이연승, 이민정, 강민정, 2014; 이연승, 이민정, 임수진, 2014; 이민정, 이해정, 2015).
따라서, 본 연구는 r-러닝 통합활동에 참여한 유아의 로봇활용 다면적 능력을 조사하고자 하였으며 구체적으로 로봇지식, 로봇기능, 또래로봇활용, 로봇활동 수행 및 완성, 로봇 활동 지속성 등의 관점에서 살펴보고자 하였다.
본 연구는 r-러닝 로봇을 활용한 통합 활동에 참여한 유아들의 로봇활용 다면적 능력을 조사하고자 하였으며 2014년 9월부터 12월까지 r-러닝 통합활동 적용, 사전 및 사후검사, 자료분석 등의 단계에 따라 시행되었다.
본 연구의 대상은 K시에 소재하는 1개유치원의 만 5세 유아 20명과 P시에 소재하는 1개 유치원 만 5세 유아 20명을 대상으로 하였으며 이들 유아들은 각각 실험집단과 비교집단으로 선정되었다. 실험집단에 참여한 유아들은 총 12회 동안 아이로비와 제니보를 활용한 R-러닝 통합활동에 참여하였으며 주 1회 30-40분의 r-러닝 통합활동에 참여하였다. 비교집단 유아들은 학급에 아이로비와 제니보를 활용할 수 있도록 로봇을 지원하고 관련 활동 자료들은 교사에게 배부하였으나 유치원의 누리과정 활동에 통합되지 않는 개별 활동으로서 자유선택활동 시간에 주로 활용되었다.
본 연구는 r-러닝 통합활동에 참여한 유아의 로봇활용 다면적 능력을 평가하고자 하였으며 이를 위해 로봇관련 선행연구에서 제시한 로봇활용과 관련한 유아능력 준거와 도구를 활용하여 평가를 위한 측정 준거를 완성하였다.
R-러닝 통합활동 효과에 관한 선행연구에 의하면 로봇 통합활동을 통한 유아의 다면적 능력은 로봇지식활용, 기능활용, 또래협력관계, 로봇활동 수행 및 완성, 로봇활동참여의 지속성 등으로 제시되고 있다(이연승, 이민정, 강민정, 2014; 이연승, 이민정, 임수진, 2014).
유아의 로봇활용 다면적 능력을 측정하기 위해 사용된 도구와 구제척인 측정방법은 다음과 같다. 첫째, 로봇활용 다면적 능력 측정은 로봇지식활용, 로봇기능활용, 또래로봇활용, 로봇활동 수행 및 완성, 로봇참여의 지속성 등의 5개 항목으로 구성되어 있으며 로봇 활용 다면적 능력은 각각의 하위 항목의 평가득점은 관찰 및 추정에 근거하여 4점 평정척도로 평가하였다. r-러닝 통합활동에 참여한 연구경험이 있는 박사과정 보조 연구원이 평가에 참여하였으며 4점=매우 그렇다, 3점=대체로 그렇다, 2점=보통이다, 1=전혀 그렇지 않다 등으로 평가하였다.
둘째, 로봇활용 다면적 능력 평가를 위해 유아들은 ‘로봇과 함께 구슬치기를 해 보아요’와 ‘로봇의 집을 만들어 보아요’라는 두 가지 활동을 실험처지의 사전과 사후에 실험집단과 비교집단 유아들을 대상으로 실시하도록 하였다. 사전 및 사후 검사를 위해 유아들은 실외놀이 시간에 로봇활용이 용이한 대강당에서 30-40분 정도 2개의 소집단으로 구분하여 로봇과 함께 구슬치기 활동과 로봇 집만들기 활동에 유아들이 자유롭게 참여하도록 하였다. 이러한 과정에서 R-러닝 통합활동 경험이 있는 박사과정 2인이 사전과 사후검사에 함께 참여하여 유아들의 로봇활용 통합능력을 점수화하였다. 사전검사에는 로봇과 함께 구슬치기 활동을 사용하였으며 사후검사에는 로봇 집 만들기 활동을 사용하였으며 사전검사 및 사후검사 시에 각각 2개의 소집단으로 구분된 유아들이 동일한 장소에서 각각 사전과 사후 검사에 참여하였다.
1) 실험집단의 r-러닝 통합활동
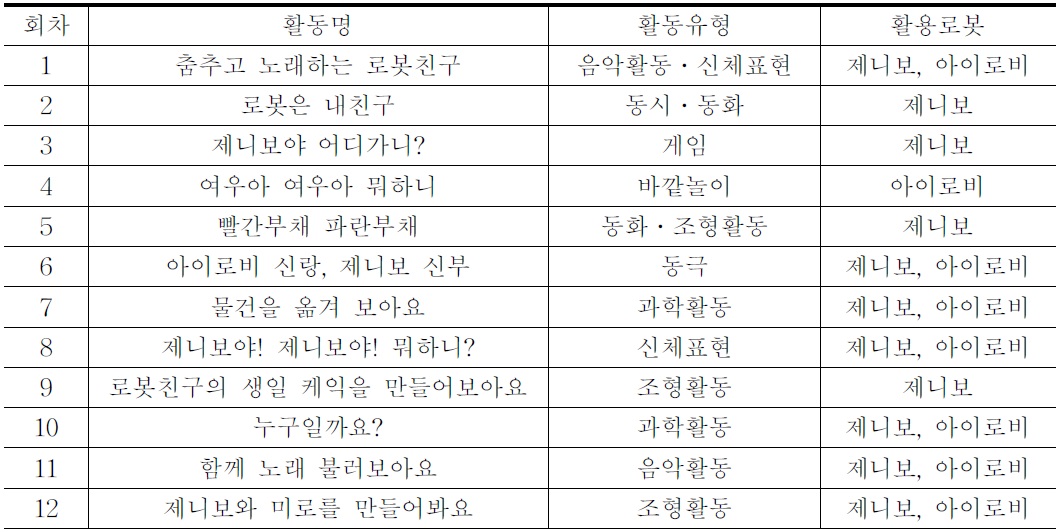
R-러닝 통합활동에 참여한 유아들의 로봇활동 다면적 능력을 평가하기 위해 실험집단 유아들에게 r-러닝 통합활동이 제공되었으며 실험집단 유아들은 총 12회 주 1회 회당 30- 40분의 R-러닝 통합활동에 참여하였다. 실험집단 유아들은 주제중심 통합활동에 적용된 로봇활동에 참여하였으며 제니보와 아이로비가 모두 사용되었다. 비교집단 유아들은 일상적으로 제공되고 있는 유치원의 주제 중심 통합활동에 참여하였고 새롭게 제공된 아이로비와 제비보를 자유선택활동시간을 통해서 자유롭게 활용하도록 하였다. 비교집단 유아들에게는 로봇 통합활동으로 계획되고 준비된 활동을 제공하지 않았으며 교사-유아, 유아-유아에 의한 로봇활동이 단위수업 활동 시간이 아닌 일상에서 자유롭게 이루어지도록 하였다. 실험집단의 r-러닝 통합활동과 구체적인 활동사례는 표 1과 같다
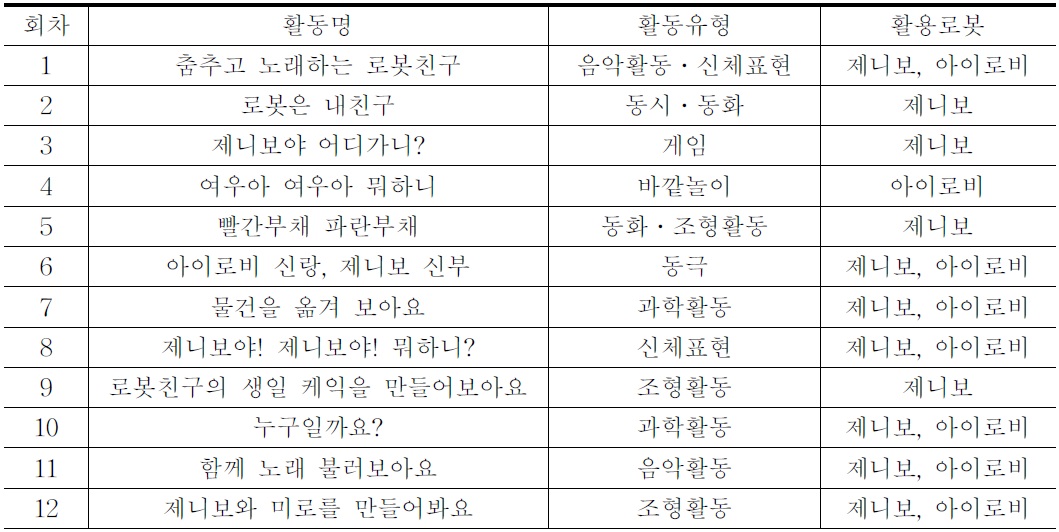
실험집단의 R-러닝 로봇통합 활동명
2) 비교집단 활동
비교집단 유아들은 유치원에서 제공하고 있는 주제 중심 통합활동에 참여하였다. 비교 집단 유아들에게 제니보와 아이로비가 제공되었으나 r-러닝 통합활동에 의해 계획되고 실행되는 로봇 통합활동은 경험하지 않았다. 다만, 자유선택활동시간에 제니보와 아이로비를 교사, 유아, 교사-유아, 유아-유아 간 자유롭게 활용할 수 있도록 하였다. 비교집단 유아들에게 제공된 로봇은 기존의 활동경험과 연관되지 않은 로봇관련 활동 경험이며 이러한 경험은 실험집단 유아들이 주제 중심 통합활동의 맥락에 연계하여 제시된 r-러닝 통합활동 경험과 차별성을 갖는다. 실험집단과 비교집단이 갖는 이러한 로봇경험의 차이는 로봇과 기존 교육경험과 연계성 유무에 의한 R-러닝 생태적 환경의 차이라고 할 수 있다.
본 연구는 r-러닝 로봇을 활용한 통합 활동이 유아의 로봇활용 다면적 능력에 미치는 영향을 조사하고자 하였으며 실험집단과 비교집단 모두에게 동일한 검사방법과 검사도구를 사용하여 유아의 로봇활용 다면적 능력을 측정하였다. 측정된 평점은 SPSS 19.0 프로 그램을 이용하여 분석하였으며 평균, 표준편차,
본 연구는 r-러닝 통합활동에 참여한 유아의 다면적 능력을 조사하고자 하였으며 구체적으로 하위 영역인 로봇에 관한 지식활용능력, 로봇에 관한 기술활용능력, 로봇또래협력 능력, 로봇에 관한 활동 수행 및 완성능력, 로봇활동 지속성 등에 따라 살펴보았으며 구체적인 내용은 다음과 같다.
1. 로봇 통합활동에 참여한 유아의 로봇활용 다면적 능력
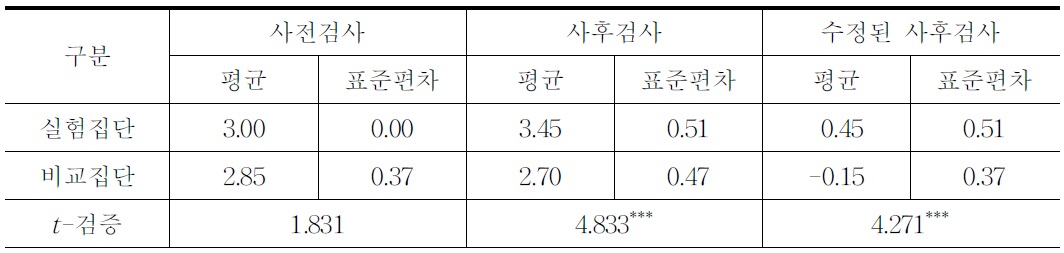
로봇 통합활동에 참여한 실험집단과 비교집단의 로봇활용 다면적 능력의 전체 점수를 집단별로 정리한 기술통계량과
[<표 1>] 집단별 로봇활용 다면적 능력 점수의 평균, 표준편차, t-검증
집단별 로봇활용 다면적 능력 점수의 평균, 표준편차, t-검증
R-러닝 통합활동을 통한 유아의 로봇활용 다면적 능력을 평가하기 위해 로봇에 관한 지식활용, 로봇기술 활용, 또래간 로봇활용, 로봇활동 수행 및 완성, 로봇활동 지속성 등에 따라 평가하였으며 구체적인 결과는 다음과 같다.
1) 로봇지식 활용 능력
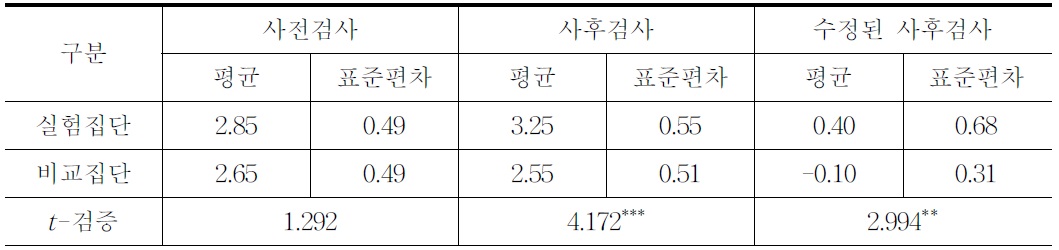
집단별 로봇활용 다면적 능력을 로봇지식 활용능력의 하위 영역별로 살펴 본 결과는 표 2와 같다. 표 2에 의하면 비교집단의 사전점수는 2.65, 사후점수는 2.55로 나타났으며 실험집단의 사전점수는 2.85, 사후점수는 3.25로 실험집단의 평균값이 높게 나타났다. 집단 간
[<표 2>] 집단별 로봇활용 다면적 능력 하위 영역별 결과: 로봇지식 활용능력 점수의 평균, 표준편차, t-검증
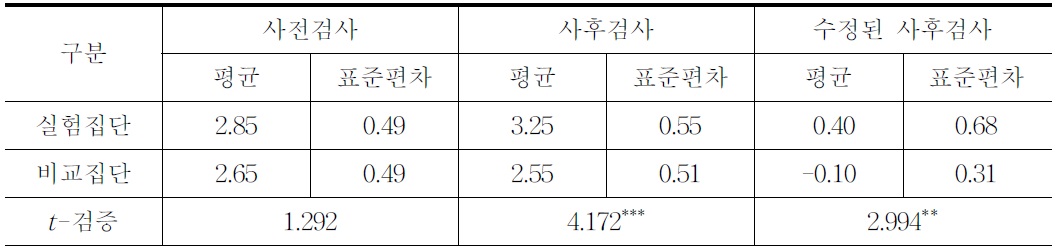
집단별 로봇활용 다면적 능력 하위 영역별 결과: 로봇지식 활용능력 점수의 평균, 표준편차, t-검증
2) 로봇기술 활용 능력
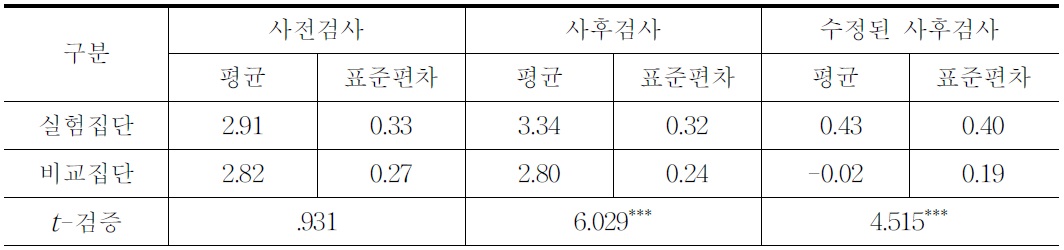
집단별 로봇활용 다면적 능력을 로봇기능 활용의 하위 영역별로 살펴 본 결과는 표 3과 같다. 표 3에 의하면 비교집단의 사전점수는 2.85, 사후점수는 2.70으로 나타났으며 실험집단의 사전점수는 3.00, 사후점수는 3.45로 실험집단의 평균값이 높게 나타났다. 집단간
[<표 3>] 집단별 로봇활용 다면적 능력 하위 영역별 결과: 로봇기능 활용 점수의 평균, 표준편차, t-검증
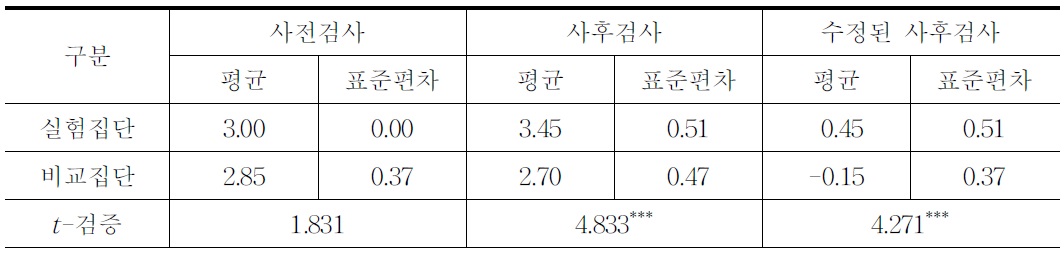
집단별 로봇활용 다면적 능력 하위 영역별 결과: 로봇기능 활용 점수의 평균, 표준편차, t-검증
3) 로봇또래활용능력
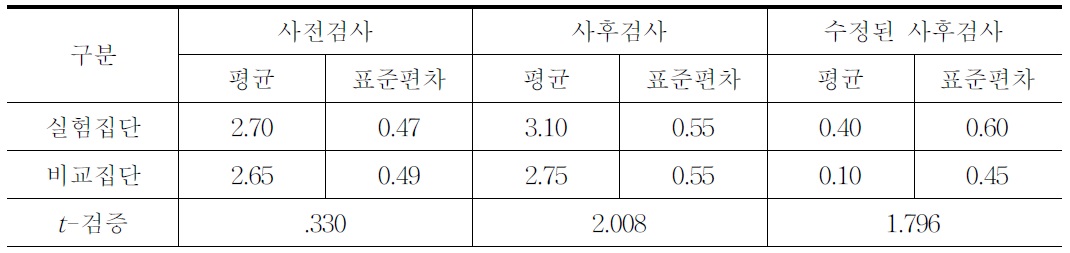
집단별 로봇활용 다면적 능력을 또래 로봇활용의 하위 영역별로 살펴 본 결과는 표 4와 같다. 표 4에 의하면 비교집단의 사전점수는 2.65, 사후점수는 2.75로 나타났으며 실험 집단의 사전점수는 2.70, 사후점수는 3.10으로 실험집단의 평균값이 높게 나타났다. 집단간
[<표 4>] 집단별 로봇활용 다면적 능력 하위 영역별 결과: 또래 로봇활용 점수의 평균, 표준편차, t-검증
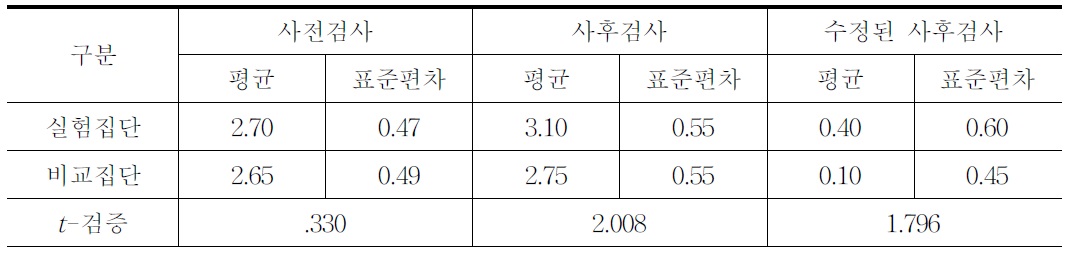
집단별 로봇활용 다면적 능력 하위 영역별 결과: 또래 로봇활용 점수의 평균, 표준편차, t-검증
4) 로봇활동 수행 및 완성
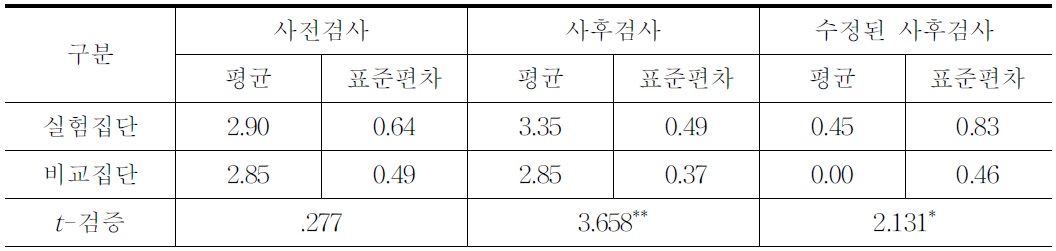
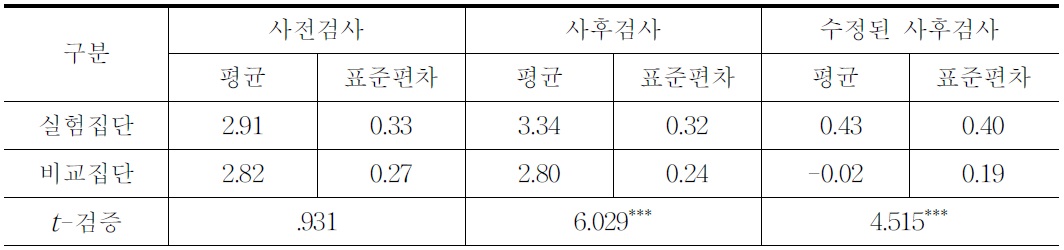
집단별 로봇활용 다면적 능력을 로봇활동 수행 및 완성의 하위 영역별로 살펴 본 결과는 표 5와 같다. 표 5에 의하면 비교집단의 사전점수는 2.85, 사후점수는 2.85로 나타났으며 실험집단의 사전점수는 2.90, 사후점수는 3.35로 실험집단의 평균값이 높게 나타났다. 집단 간
[<표 5>] 집단별 로봇활용 다면적 능력 하위 영역별 결과: 로봇활동 수행 및 완성 점수의 평균, 표준편차, t-검증
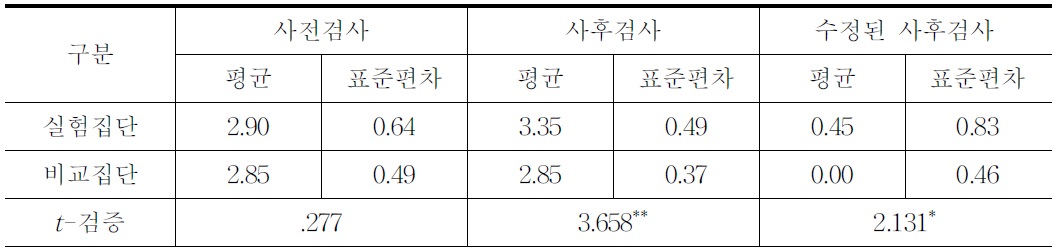
집단별 로봇활용 다면적 능력 하위 영역별 결과: 로봇활동 수행 및 완성 점수의 평균, 표준편차, t-검증
5) 로봇활동 지속성
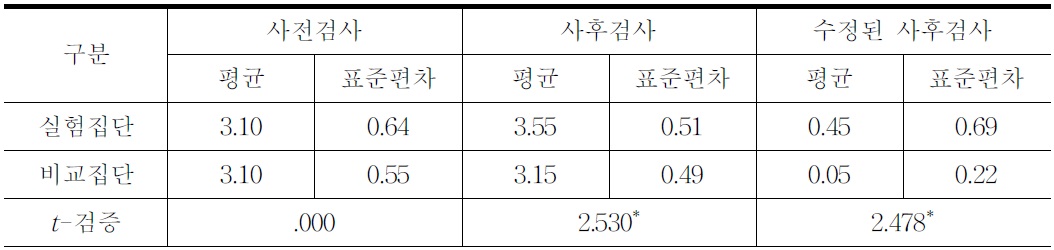
집단별 로봇활용 다면적 능력을 로봇활동 지속성의 하위 영역별로 살펴 본 결과는 표 6과 같다. 표 6에 의하면 비교집단의 사전점수는 3.10, 사후점수는 3.15로 나타났으며 실험집단의 사전점수는 3.10, 사후점수는 3.55로 실험집단의 평균값이 높게 나타났다. 집단간
[<표 6>] 집단별 로봇활용 다면적 능력 하위 영역별 결과: 로봇활동 지속성 점수의 평균, 표준편차, t-검증
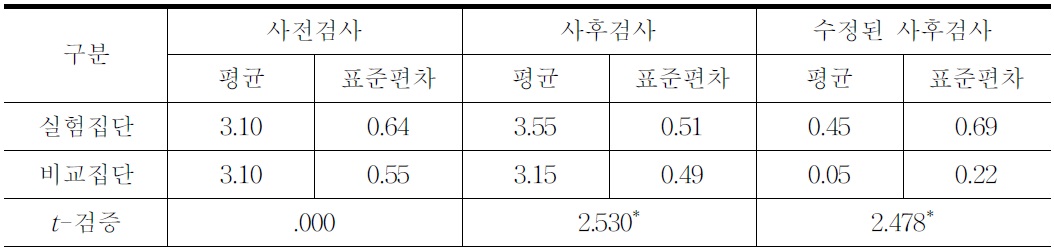
집단별 로봇활용 다면적 능력 하위 영역별 결과: 로봇활동 지속성 점수의 평균, 표준편차, t-검증
본 연구는 r-러닝 통합활동에 참여한 유아들의 로봇활용 다면적 능력을 조사하고자 하였다. R-러닝 통합활동에 참여한 유아들의 로봇활용 다면적 능력이 전반적으로 향상되었으며 구체적으로 로봇 지식활용, 로봇 기능활용, 로봇활동 수행 및 완성, 로봇활동 지속성 등의 하위 영역에서 로봇활용 다면적 능력이 향상된 것으로 나타났다. 이러한 결과를 중심으로 본 연구의 논의 및 제언을 제시하면 다음과 같다.
첫째, r-러닝 통합활동에 참여한 실험집단 유아들의 로봇지식활용 능력이 비교집단 유아들보다 향상되었다. 로봇활동은 유아들이 유아교육기관에서 일상적으로 경험하고 있는 주제 중심 통합교육의 맥락에 r-러닝 활동이라는 유기적 연계 고리를 갖는 생태환경으로 구축되었다. 즉, r-러닝 통합활동이라는 새롭게 구축된 생태적 환경은 유아들이 로봇지식을 활용하여 로봇관련 통합활동을 확장하고 다양화하게 하였다. R-러닝 통합활동의 과정에서 유아들은 로봇에 관한 지식(외모, 특징, 움직임의 범위, 콘텐츠와 기능 등)을 활동의 특성과 상황의 요구에 따라 다양하게 활용할 수 있었다. 이러한 본 연구의 결과는 r-러닝 통합활동의 환경 속에서 유아들이 로봇에 관한 지식을 사용하여 제시된 문제나 과제에 관해 다양하고 새롭게 사고하며 독창적인 방법으로 문제를 해결하는 능력이 향상되었다는 연구결과와 유사하였다(김상윤 외, 2011; 이연승, 이민정, 임수진, 2014; 이연승, 이민정, 강민정).
둘째, r-러닝 통합활동에 참여한 유아들의 로봇기능 활용 능력이 향상되었다. R-러닝 통합활동의 맥락에서 유아들은 로봇을 기능적 수준에서 조작하는 것이 아니라 주제와 상황에서 요구되는 문제를 해결하고 과제를 완성하기 위해 상황적이며 맥락적인 이해를 바탕으로 로봇기능을 적극적으로 활용하였다. 즉, r-러닝 통합활동의 맥락에서 유아들은 탈맥락적인 상황의 요구를 인식하였으며 로봇기능을 적용할 수 있었다. 이러한 본 연구의 결과는 유아들이 r-러닝 통합활동의 과정에서 제시된 과제 혹은 활동을 로봇의 특성을 수용하여 해결할 수 있도록 로봇기능을 효율적으로 활용하였다는 연구결과들과 유사하였다(이연승, 강민정, 이민정, 2014; 이연승, 이민정, 임수진, 2014; 이민정, 이해정, 2015).
셋째, r-러닝 통합활동에 참여한 유아들의 또래로봇활용 능력에는 차이가 나타나지 않았다. 선행연구 결과에 의하면, r-러닝 통합활동에 참여한 유아들은 로봇을 매개로 하여 또래간 의사소통. 또래간 협력활동이 활성화되는 것으로 나타났다(이연승, 강민정, 이민정, 2014; 이연승, 이민정, 임수진, 2014; 이민정,이해정, 2015). 그러나, 본 연구의 결과는 이러한 선행연구에서 제시된 또래협력의 특성과는 다르게 나타났다. 이들 선행연구는 대부분 질적인 연구방법으로 시행된 연구로서 r-러닝 통합활동의 과정에서 나타나는 유아 들의 또래 협력적 행동을 중점적으로 기술한 연구들이다. 이와 비교할 때 본 연구는 또래 협력적 특성을 양화하여 측정하므로써 과정적이며 지속적으로 나타나는 또래협력의 향상을 심층기술하는데 제한점이 있다고 할 수 있다.
넷째, r-러닝 통합활동에 참여한 유아들의 로봇활동 수행 및 완성에 관한 능력이 향상된 것으로 나타났다. 기존의 교육활동 맥락에 새롭게 연계된 로봇은 유아들이 활동 및 과제를 새롭고 흥미롭게 수용하게 하였으며 로봇을 통한 활동을 완성할 수 있도록 수행능력을 극대화하도록 하였다. 유아들은 로봇을 통해 과제를 수행하고 완성해야 할 뿐만 아니라 로봇을 과제를 함께 수행하는 대상으로 조망하므로써 r-러닝 통합활동의 맥락에서 과제 수행 및 완성도가 높은 것으로 나타났다(김상윤 외, 2011; 이연승, 강민정, 이민정, 2014; 이연승, 이민정, 임수진, 2014; 이민정, 이해정, 2015).
다섯째, r-러닝 통합활동에 참여한 유아들은 로봇활동 지속성이 향상된 것으로 나타났다. 유아들은 r-러닝 통합활동의 맥락에서 로봇을 단순한 교육활동의 매개로 인식하는 것이 아니라 유아들과 함께 과제를 지속하는 또래 혹은 파트너로 인식하는 것으로 나타났다(김상윤 외, 2011; 이연승, 강민정, 이민정, 2014; 이연승, 이민정, 임수진, 2014; 이민정, 이해정, 2015). 유아들에게 로봇은 활동을 지속하기 위해 함께 조력해야 하는 대상으로 인식되었으며 이러한 로봇에 대한 친근성은 유아들의 r-러닝 통합활동의 맥락에서 제시된 과제를 지속가능하게 하였다.
끝으로 본 연구를 위한 제안은 다음과 같다. 유아교육현장에 로봇이라는 매체가 도입되고 교육환경에 새롭게 연계되어 r-러닝 통합활동이라는 역동적인 교육 생태계적 환경을 구축하고 있다. 본 연구는 r-러닝 통합활동이라는 교육 생태계적 환경 속에서 유아들이 로봇에 대한 이해와 활용 능력을 다양한 측면에서 향상시킬 수 있음을 제시하였다. 그러 나, 본 연구는 관찰 및 평정에 의한 양화된 결과로서 기존 선행연구에서 보편적으로 제시한 로봇을 통한 또래협력의 특성 등을 객관화하는데 제한점이 있었다. 따라서, 후속연구는 기존에 다양하게 제시된 r-러닝 통합활동을 대상과 상황에 따라 양적으로 측정하고 평가할 수 있는 도구 및 프로그램 개발 효과에 대한 연구가 요구된다고 하겠다.