초기 선형 설계 단계에서 선박의 조종성능은 다양한 방법으로 검토되어 왔다. 대표적인 방법으로는 시스템 기반 방법과 수치해석 기반 방법이 있다. 시스템 기반 방법은 경험식 또는 구속모형시험으로 구한 조종성 미계수를 이용해서 시뮬레이션을 통해 조종성능을 검토하는 방법이다. 수치해석 또는 CFD 기반 방법은 전산기로 가상의 구속모형시험 또는 자유항주시험을 수행하고 조종성능을 검토하는 방법이다. 최근에는 전산기의 발전에 따라 다양한 CFD 기법들이 활발하게 이용되고 있다 (SIMMAN, 2008; ITTC, 2011; Simonsen, et al., 2012; Shin, et al., 2013; ITTC, 2014). CFD로 가상 자유항주시험을 수행하면 조종성능을 직접 확인할 수 있다는 장점이 있지만, 상당한 계산자원이 필요하기 때문에 연구 목적에 주로 이용되고 있다. 이에 현 시점에서 조선소 설계 실무에서는 수치 구속모형시험이 많이 이용되고 있다 (ITTC, 2011).
조선소에서 조종성능 평가에 CFD를 보다 원활하게 이용하기 위해서는 설계자가 쉽게 이용할 수 있어야 하고, 숙련도에 따른 해석 결과의 차이가 크지 않아야 한다. 즉, 누가 해석을 하더라도 선형 변화에 따른 조종성능 평가 결과에 일관성이 확보되어야 한다. 이에 본 연구에서는 사용자 편의성이 높아 상대적으로 쉽게 사용법을 습득할 수 있는 RANS 기반의 상용 수치해석 프로그램을 이용해서 일관성 있는 조종성능 평가 프로세스를 구축하고자 하였다. 상용 프로그램으로는 Simonsen, et al. (2012)의 선행 연구를 통해서 유용성이 검증된 바 있는 STAR-CCM+를 이용하였다. 이 프로그램이 제공하는 여러 기능 중 하나인 매크로 함수를 이용해 선형 캐드 파일 이후의 수치해석 작업을 자동화하였다. 다양한 선박에 대한 모형시험결과와의 비교를 통해서, 안정적인 계산 수행이 가능한 격자계 생성과 난류 모형 등 계산 조건을 찾아 매크로 함수로 구현하였다. 이를 통해 격자계 생성 등 사전 준비 작업을 단시간에 수행할 수 있을 뿐만 아니라, 선형캐드 파일이 동일한 경우 사용자에 관계없이 일정한 결과를 얻을 수 있도록 하였다. 개발된 프로세스의 검증을 위해서 1/40.0 축척의 KCS(KRISO Container Ship)와 1/46.426 축척의 KVLCC(KRISO Very Large Crude-oil Carrier) 1&2에 대한 수치해석과 PMM 시험 결과를 비교하였다. 대부분의 의미 있는 조종성 미계수가 모형시험 대비 95% 신뢰구간 내에서 추정되는 것을 확인할 수 있었고, 전진거리, 선회직경, 오버슈트 각 등 조종성능 평가 지수들도 잘 일치하는 것을 확인할 수 있었다. 이를 통해 개발된 프로세스가 설계 단계에서 선형변화에 따른 조종성능을 평가하는 데 유용한 도구로 이용될 수 있음을 확인하였다.
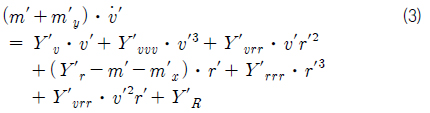
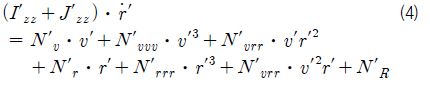
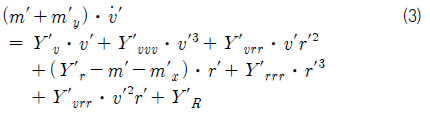
시스템 기반 방법으로 선박의 조종성능을 평가하기 위해서는 조종운동의 동역학적 특성을 묘사할 수 있는 운동방정식이 필요하다. Newton의 제2운동법칙을 질량이 m, 선수동요 관성이 Izz인 선박의 수평면 내에서의 운동에 적용하면 식 (1)과 같은 방정식을 얻을 수 있다.

여기서

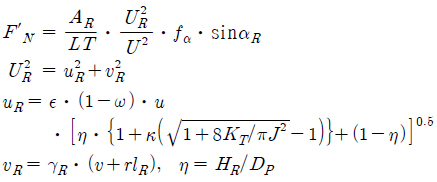
여기서 (′)은 무차원화된 성분이라는 것을 나타낸다. 아래첨자 P와 R이 붙은


여기서,
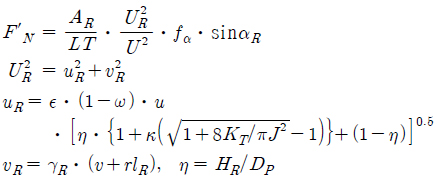
식 (2)~(6)에 포함된
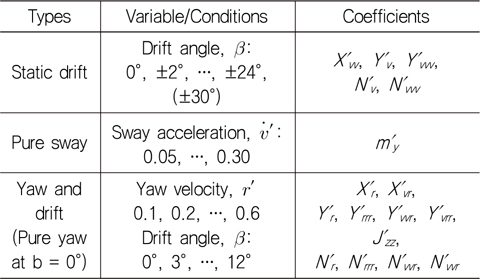
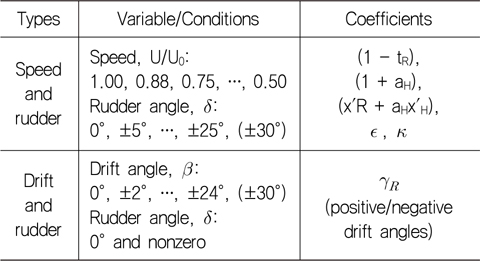
[Table 1] Bare hull model test conditions and related coefficients
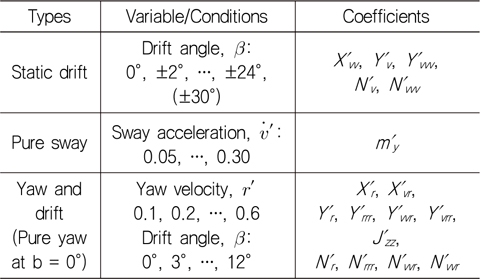
Bare hull model test conditions and related coefficients
[Table 2] Propeller & rudder appended model test conditions and related coefficients
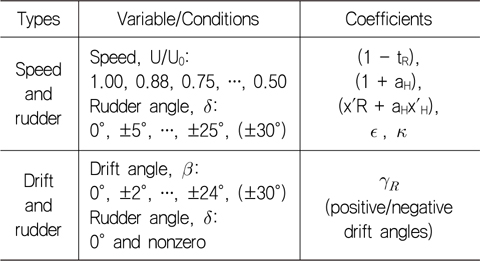
Propeller & rudder appended model test conditions and related coefficients
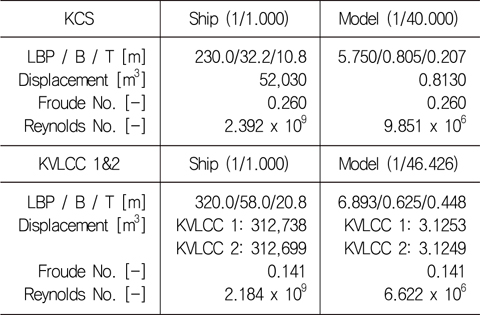
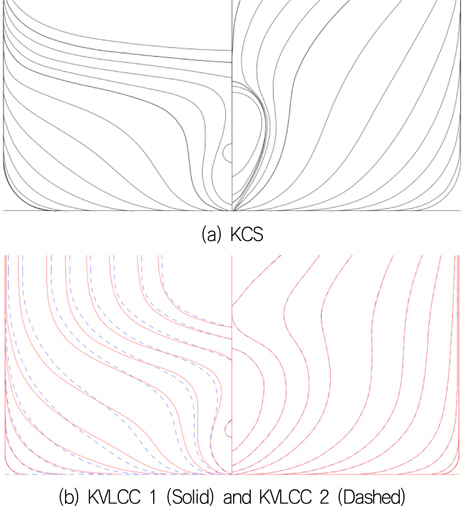
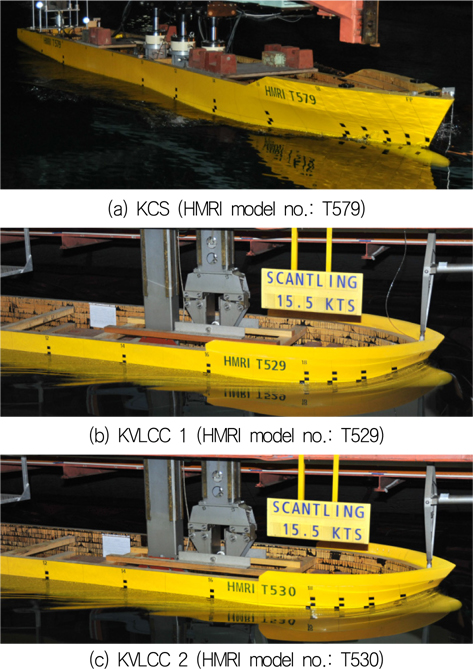
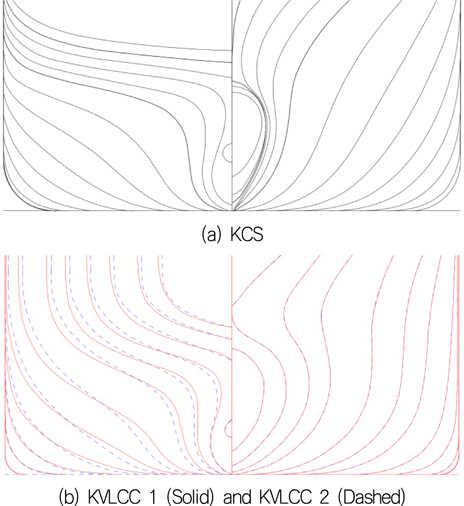
구속모형시험 대상 선형은 조종성능 연구의 표준선형인 KCS와 KVLCC 1&2를 이용하였다. KCS는 3,600 TEU급 컨테이너 운반선이고, KVLCC 1&2는 선미형상에 차이가 있는 초대형 원유 운반선이다. 이들은 ITTC 조종성 분과위원회에서 주관하는 SIMMAN 워크샾 등을 통해서 선형과 모형시험 결과가 공개되어 있으므로 조종성능 평가 정도 검토 및 수치해석결과의 비교/검증에 활용되고 있다 (Kim, et al., 2005; SIMMAN, 2008; 2014). 현대중공업 선박연구소에서도 1/40.0 축척의 KCS와 1/46.426 축척의 KVLCC 1&2를 제작하여 구속모형시험을 수행한 바 있으며, KVLCC 2에 대한 선체 단독 구속모형시험 결과를 SIMMAN 2014에 비교 자료로 제출하였다 (Shin, et al., 2012; Sung, 2013; Sung, et al., 2014; SIMMAN, 2014). 제작된 모형선의 주요제원과 형상은 Table 3, Fig. 1,2와 같다.
[Table 3] Principal dimensions of KCS and KVLCC 1&2
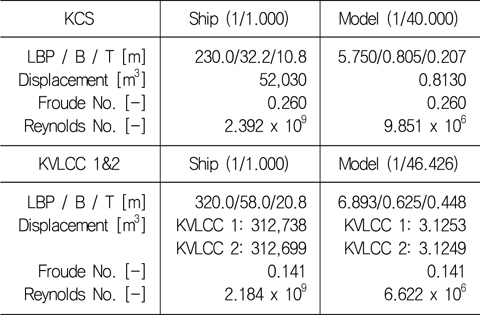
Principal dimensions of KCS and KVLCC 1&2
구속모형시험을 수행하면 특정한 운동변수(
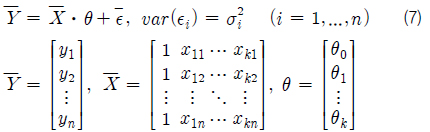


추정된 미계수는 잔차 (

100 × (1 -
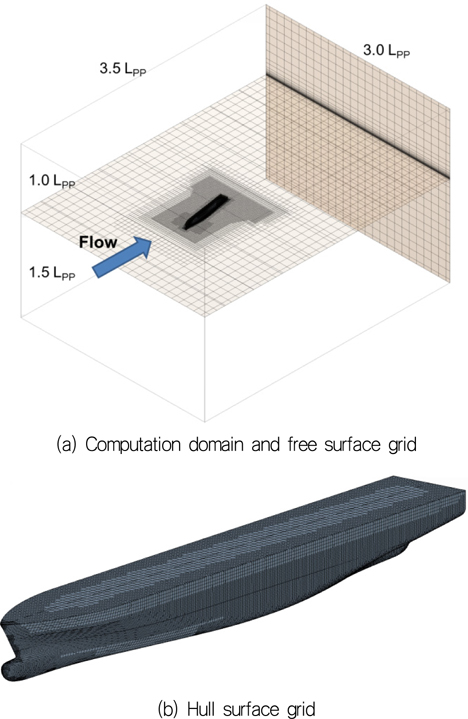
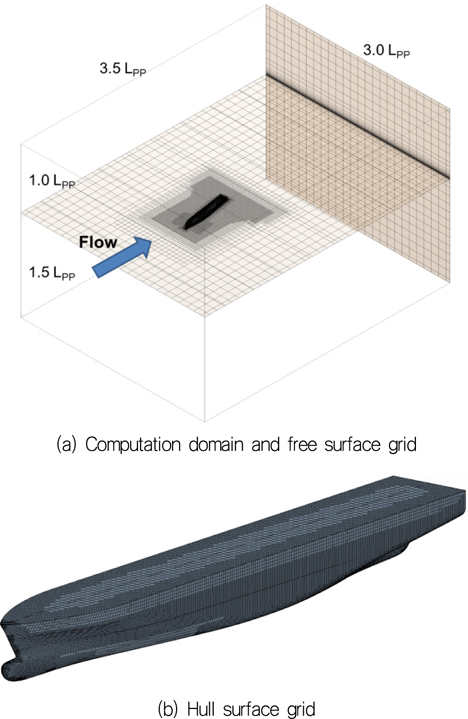
STAR-CCM+를 이용한 RANS 기반 수치해석은 저항 성능 평가를 위해 개발된 기법 (Lee & Lee, 2014; Park, et al., 2014)을 바탕으로 개발하였다. 계산 영역은 Fig. 3과 같이 선체에 의해서 발생한 자유수면이 계산 영역의 입구와 출구 경계조건에 의해 왜곡되지 않도록 설정하였다. 선체표면과 공간 격자는 트리머 격자(trimmer mesh)와 경계층 격자(prism layer)를 사용하여 생성하였다. 트리머 격자는 유동의 특성이 복잡한 영역에서는 조밀한 격자를 분포시키고 단순한 영역에서는 성긴 격자를 분포시켜서 격자 수를 효율적으로 감소시킬 수 기법이다. 격자가 다면체 특성을 지니므로 계산되는 물리량의 공간 구배를 2차 정확도로 계산하기 위해서 최소 자승법을 이용하였다. 전단력이 중요한 선체 주변에서는 경계층 격자를 사용하였다. 총 6개의 격자층을 생성하였으며, 첫 번째 격자는 벽 함수 사용을 고려해 y+의 평균값이 30~40이 되도록 설정하였다. 양질의 경계층 격자 생성을 위해 갑판에는 경계층 격자를 사용하지 않았지만, 공기에 의한 전단력은 물에 비해 무시할 수 있는 수준이라는 것을 확인하였다. 이상의 방법으로 생성된 격자는 모형선의 크기에 따라 약 100만개에서 200만개 사이에 분포하였다.
자유수면은 Volume of Fluid(VOF) 방법으로 고려하였으며, 선체의 동적 자세 변화는 계산 영역 전체를 병진/회전하는 Dynamic Fluid Body Interaction(DFBI) 기법으로 고려하였다. 비정상 상태 해석을 수행하였다. 시간과 공간에 대해서 각각 1차와 2차 정확도의 차분을 적용하였다. Δt = 0.02초로 두고 정적 시험은 총 90초, 동적 시험은 180초의 계산을 수행하였다. 매 시간 간격에서 15회의 내부 계산을 반복하였다. 초기 자세에 따른 오차를 배제하기 위해 계산 시작 10초 후부터 선체의 동적 자세 변화를 고려하도록 하였다. 동적 자세 변화에 따라 정적 시험에서도 주기적인 진동이 발생하므로 정적 시험에서는 마지막 10초의 평균을 취해 힘과 모멘트의 평균을 구하였다. 평균값 계산 시간에 따른 오차는 0.3% 미만이라는 것은 기존 연구를 통해 확인하였다 (Park, et al., 2014). 동적 시험은 계산 계산 종료 시점에서부터 역으로 한 주기의 힘과 모멘트를 구하고 이를 Fourier 변환해서 이용하였다.
사항 시험과 같은 정적 시험에서는 난류 종결을 위해 Reynolds Stress Model(RSM)을 이용하였으며, 동적 시험에서는 수치계산의 안정성과 효율을 위해 Realizable k-
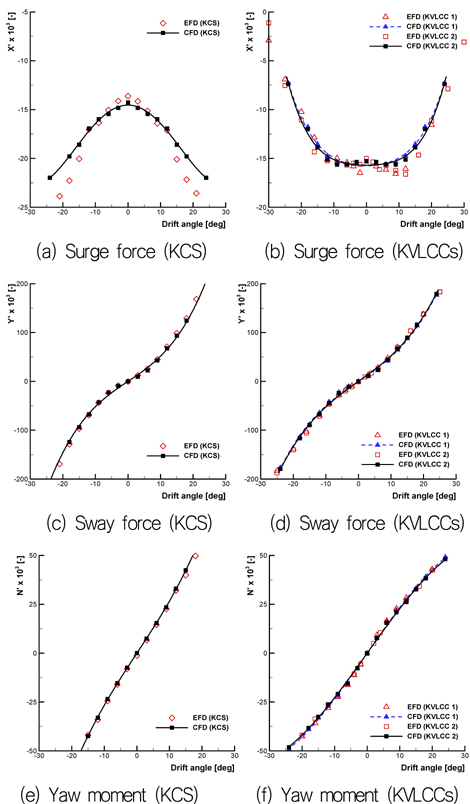
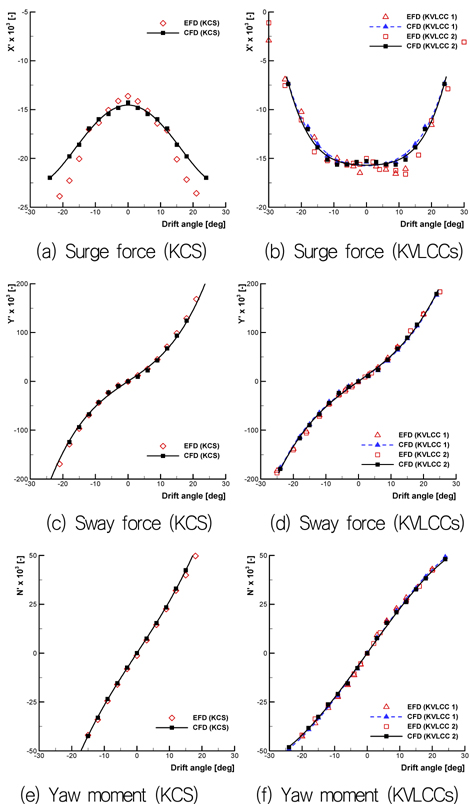
사항 시험은 모형선의 사항각을 일정한 조건으로 예인하면서, 선체에 작용하는 힘과 모멘트를 계측하는 시험이다. 이 결과를 이용하면 식 (2)~(4)에 포함된 v과 관련 미계수를 결정할 수 있다.
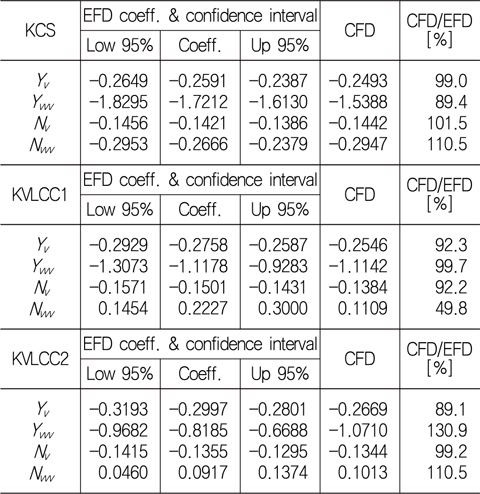
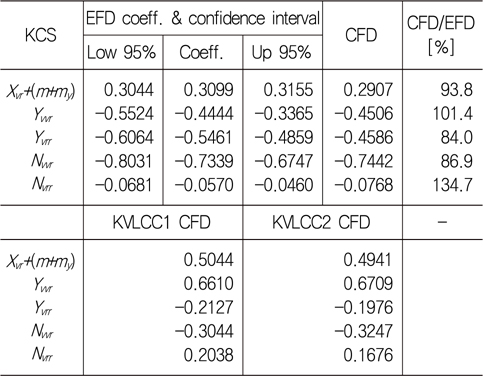
Fig. 4와 Table 4에는 모형시험(EFD)과 수치해석(CFD)으로 구한 사항 시험에서의 힘과 모멘트 및 조종성 미계수를 비교해서 보여주고 있다. Fig 4에서 EFD 결과는 속이 빈 도형으로 나타냈었으며 CFD 결과는 실선 또는 점선으로 나타내었다. 전체 사항각 범위에서 CFD가 EFD를 잘 추종하고 있는 것을 확인할 수 있다. Table 4에서 EFD로 구한 미계수의 기대값과 95% 신뢰구간의 하한(Low 95%)과 상한(Up 95%)을 CFD로 구한 미계수의 값과 비교해서 보여주고 있다. CFD가 조종성능 평가에 중요한 선형 미계수를 EFD 대비 11% 이내의 오차로 추정할 수 있다는 것을 볼 수 있다. 한편 CFD로 구한 다수의 계수들이 EFD로 구한 계수의 95% 신뢰 구간 범위 내에서 추정되고 있는 것을 확인할 수 있다.
[Table 4] Manoeuvring coefficients estimated from static drift test
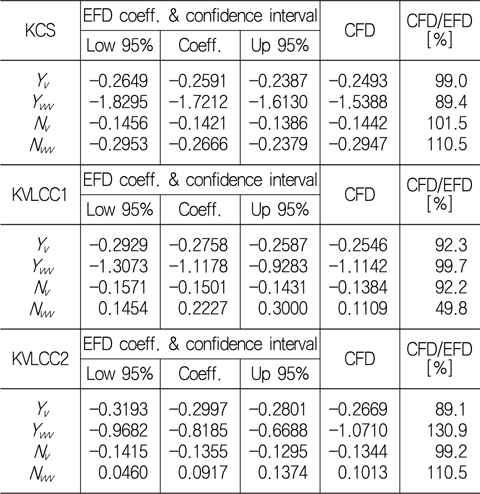
Manoeuvring coefficients estimated from static drift test
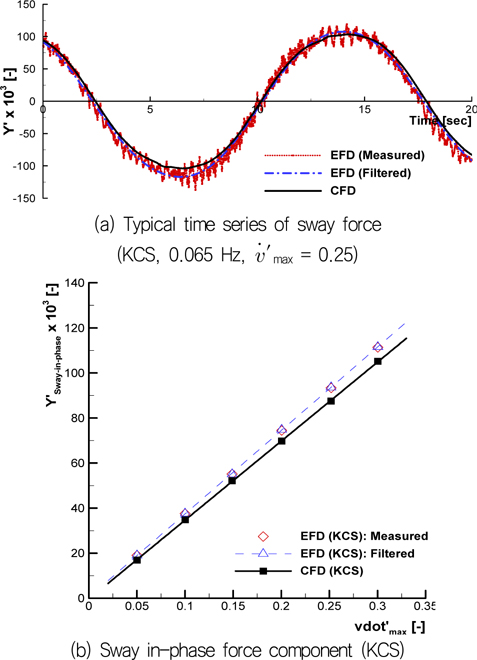
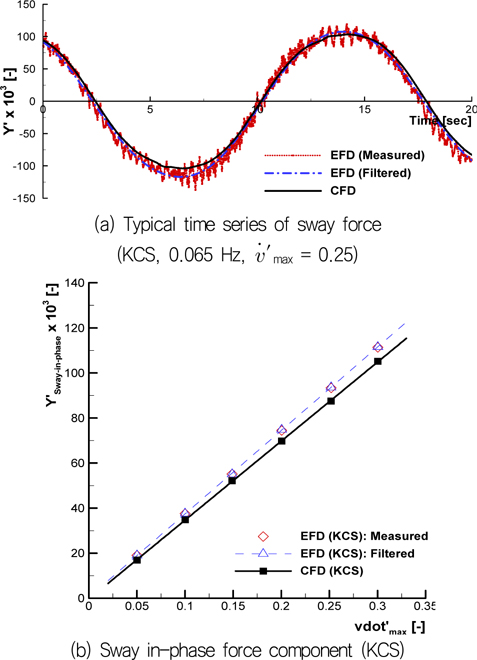
순수 좌우동요 시험은 선수동요를 고정한 상태에서 좌우동요만 발생시키는 시험으로, 좌우동요 속도와 가속도만 변화는 시험이다. 따라서, 좌우동요 속도와 가속도에 관계되는 변수를 모두 구할 수 있지만, 좌우동요 속도 변화 폭이 사항시험보다 좁기 때문에 가속도 관련 변수만 구하는 것이 일반적이다.
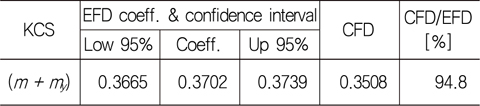
KCS에 대한 순수 좌우동요 해석결과는 Fig. 5와 Table 5와 같다(KVLCC에 대한 선체 단독의 좌우동요 시험은 수행되지 않았다). Fig. 5(a)에서 붉은 점선은 원본 계측 자료, 파란 일점 쇄선은 Fourier 필터를 적용한 결과, 검은 실선은 수치해석 결과이다. 모두 관성 항을 포함하고 있는 결과이다. EFD과 CFD는 전반적으로는 잘 일치하지만 최대/최소값 부근에서 CFD가 다소 작은 특징이 있었다. Fourier 해석을 통해 좌우동요와 동일 위상의 성분을 구하고(Fig. 5(b)), 좌우동요 관성항을 추정한 결과는 Table 5와 같다. CFD가 EFD 대비 약 95% 수준의 값을 가지도록 추정되는 것을 확인할 수 있다.
[Table 5] Manoeuvring coefficients estimated from pure sway test
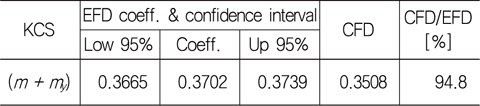
Manoeuvring coefficients estimated from pure sway test
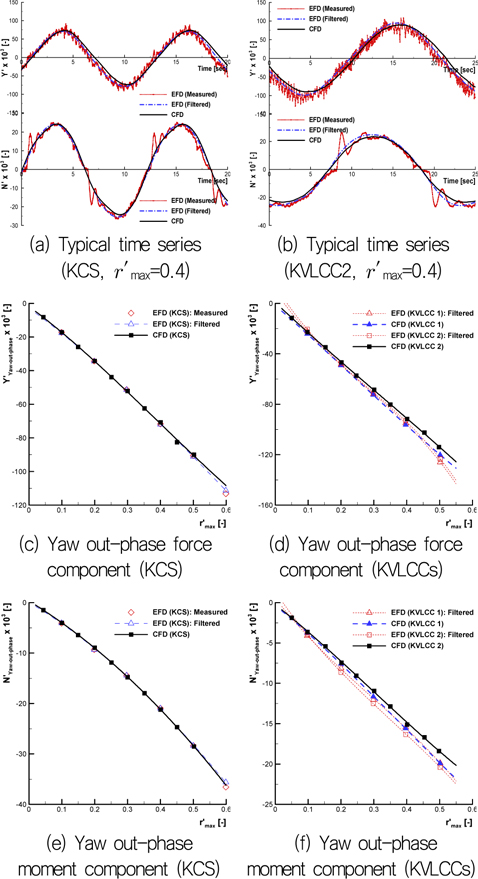
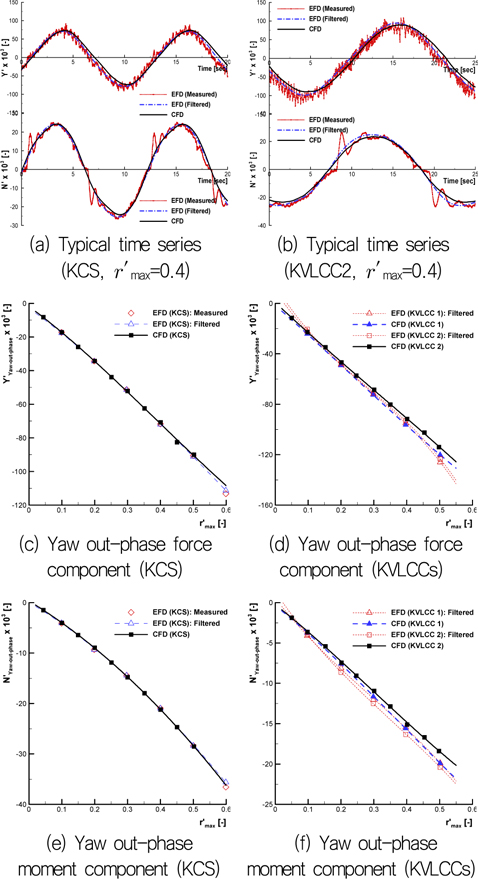
순수 선수동요 시험은 선수동요 관련 미계수를 구하기 위해 수행되는 시험이다. 좌우동요와 선수동요의 위상차가 90°가 되는 운동을 부여해 모형선이 조화운동을 하는 궤적에 항상 접하게 되는 선수동요가 구현된다.
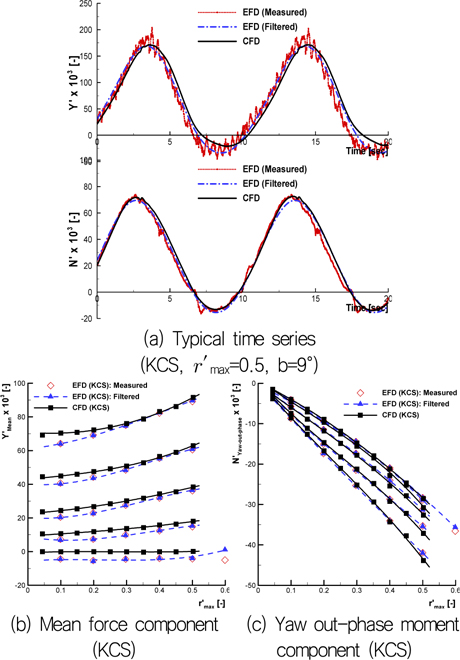
EFD와 CFD로 구한 순수 선수동요시험에서의 힘과 모멘트 및 조종성 미계수 추정결과는 각각 Fig. 6, Table 6과 같다. 시계열자료((a), (d))에 의하면 CFD로 구한 좌우동요력이 EFD에 비해 하향 경사면에서 약간의 불일치를 보이지만, Fourier 적분을 통해 구한 값은 큰 차이가 없는 것을 볼 수 있다. 선수동요 모멘트 계측값의 경우 장비의 노후화에 따른 계측 오차가 관찰되지만 Fourier 필터를 통해 충분히 해소되는 것을 볼 수 있으며, CFD 결과가 필터를 통한 EFD 결과와 비교적 잘 일치하는 것을 알 수 있다.
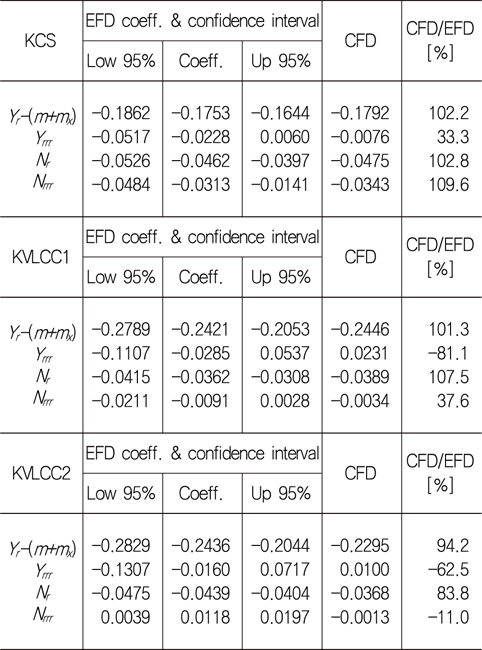
[Table 6] Manoeuvring coefficients estimated from pure yaw test
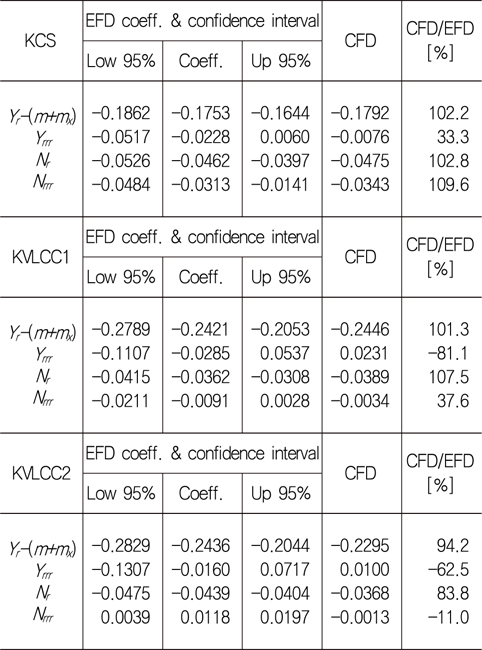
Manoeuvring coefficients estimated from pure yaw test
KCS에 대한 CFD해석은 EFD와 매우 유사한 결과를 주는 것을 볼 수 있으며, 추정된 선형 미계수도 3% 정도의 차이만 보이는 것을 확인할 수 있다. KVLCC 1&2의 경우 CFD로 추정된 대부분의 선형 미계수가 8% 이내의 오차범위로 추정된 반면, KVLCC 2의 Nr항은 16% 가량의의 오차를 보이는 것으로 나타났다. Yrrr 항의 경우 상대적으로 오차가 크게 나타나는데, 이는 시험이 수행된 구간에서 선수동요에 따른 좌우동요력에 비선형 영향이 거의 나타나지 않기 때문이다. 즉 미계수의 95% 신뢰구간에 0이 포함되어 있으므로, 해당 미계수가 0이라는 귀무가설을 무시할 수 없는 조건이다. KVLCC 1&2에 대한 Yrrr 항 및 KVLCC 1의 Nrrr 항도 동일한 해석이 가능하다.
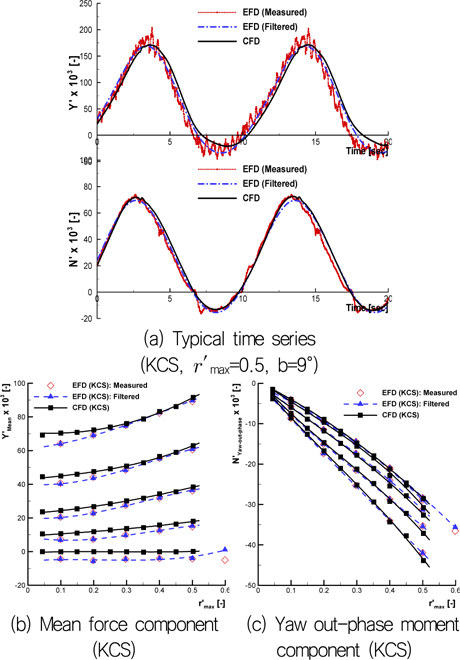
선수동요 사항각 시험은 앞서 순수 선수동요시험에 사항각을 부여해 좌우동요와 선수동요가 복합적으로 발생하도록 한 시험이다. 이를 통해 두 가지 운동변수 v와 r의 연성 효과를 나타내는 미계수를 구할 수 있다.
선수동요 사항각 시험결과는 Fig. 7과 같다. 나선에 대한 선수동요 사항각 시험은 KCS에 대해서만 수행되었다. 이 시험을 통해 구한 조종성 미계수는 Table 7과 같다. KVLCC 1&2는 수치해석 결과를 나타내었다.
[Table 7] Manoeuvring coefficients estimated from yaw and drift test
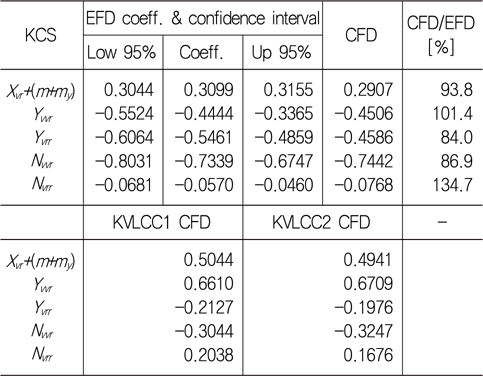
Manoeuvring coefficients estimated from yaw and drift test
사항각의 영향으로 힘과 모멘트의 시계열에 상하 비대칭 형상이 나타나는데, CFD가 EFD 결과를 잘 추종하고 있음을 알 수 있다 (Fig. 7(a)). Fourier 해석을 통해서 구한 값을 비교한 (b), (c)에 의하면 사항각과 선수동요에 따른 전반적인 경향은 일치하지만 값에서는 차이를 보이고 있다. 특히 평균값을 비교한 (b)에서 뚜렷한 차이를 보이고 있다. 사항각이 없는 경우를 나타내는 가장 아래쪽 선은 이론적으로는 0이 되어야 한다. 선체가 좌우 대칭이고 부여한 조화운동도 대칭이므로, 한 주기 동안의 힘과 모멘트를 적분해서 평균을 취하면 0되어야 한다. 하지만 실험에서 발생 가능한 여러 가지 원인(모형선 제작, 설치, 운동 구현 상의 오차 등)으로 인해서 정확하게 좌우 대칭이 구현되지 않는다면 한 주기의 평균이 0이 되지 않는다. 오차의 원인에 대해서는 향후 보다 면밀한 분석이 필요하다. CFD의 경우 이러한 오류가 나타나지 않는 것을 확인할 수 있다. 이상의 차이로 인해서 CFD로 추정한 Yvrr과 Nvrr 계수가 EFD로 구한 값의 신뢰구간 밖에서 추정되는 것으로 판단된다. 나머지 계수들은 비교적 정도 높게 추정되고 있다.
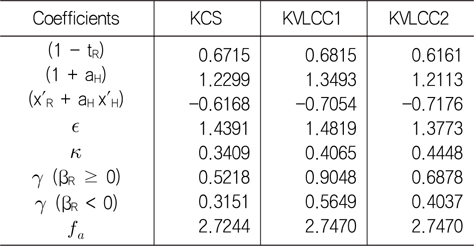
앞장에서 추정된 미계수를 이용해서 35도 타각 선회와 지그재그 운동을 시뮬레이션하고 결과를 비교하였다. 시스템 기반의 방법으로 시뮬레이션을 하기 위해서는 선체 관련 미계수 이외에도 식 (6)에 포함된 여러 간섭계수가 필요하다. 이들은 타와 프로펠러가 모두 장착된 상태에서 수행된 시험 (Shin, et al., 2012; Sung, 2013)을 재 해석해서 구하였다. 추정된 미계수는 Table 8과 같다. 향후 타와 프로펠러를 가상모형시험을 수행해 간섭계수의 추정을 시도할 예정이다.
[Table 8] Interaction coefficients for manoeuvring simulation
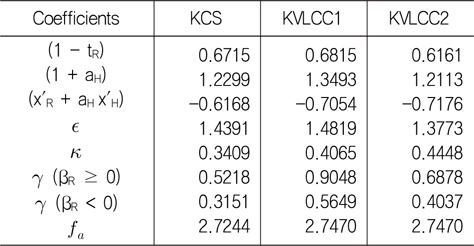
Interaction coefficients for manoeuvring simulation
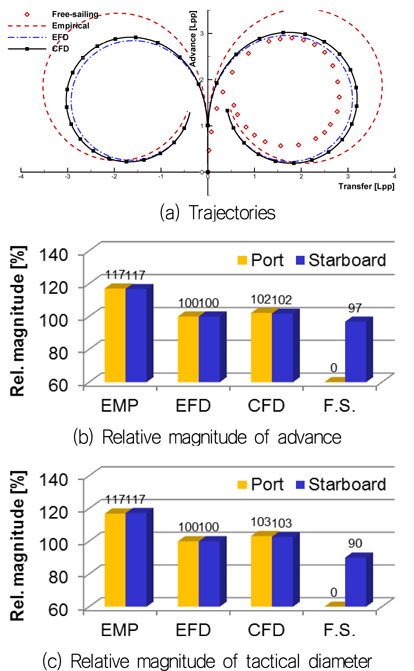
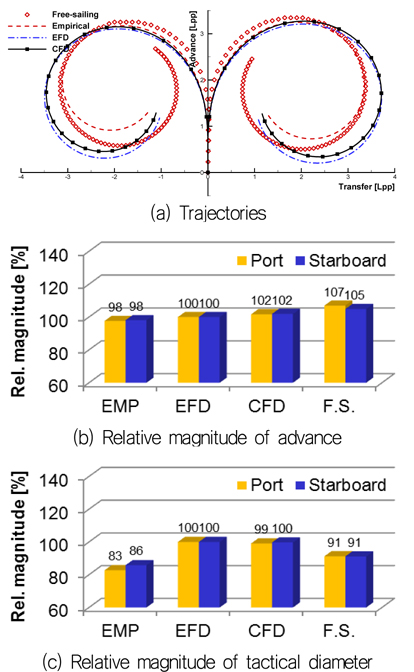
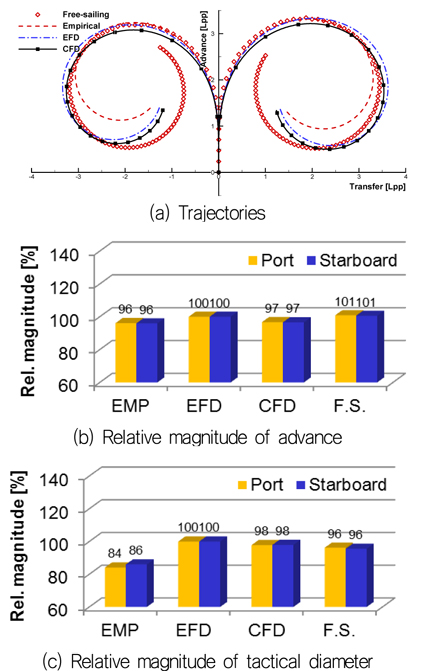
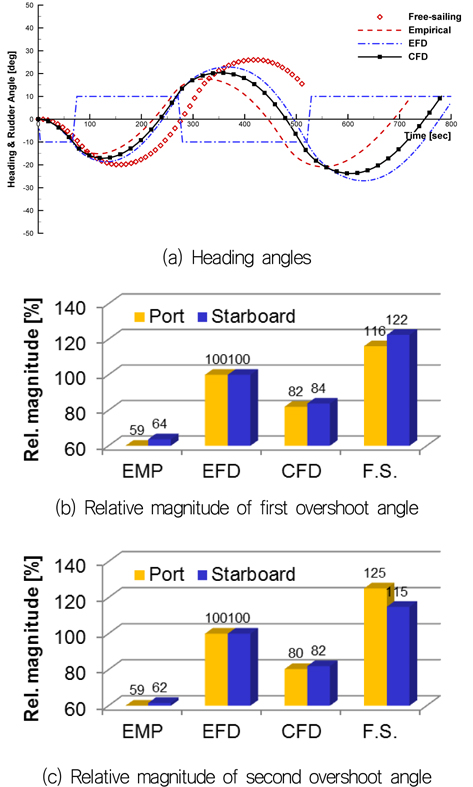
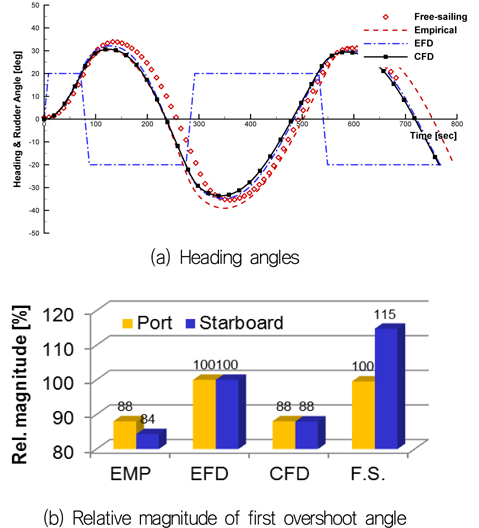
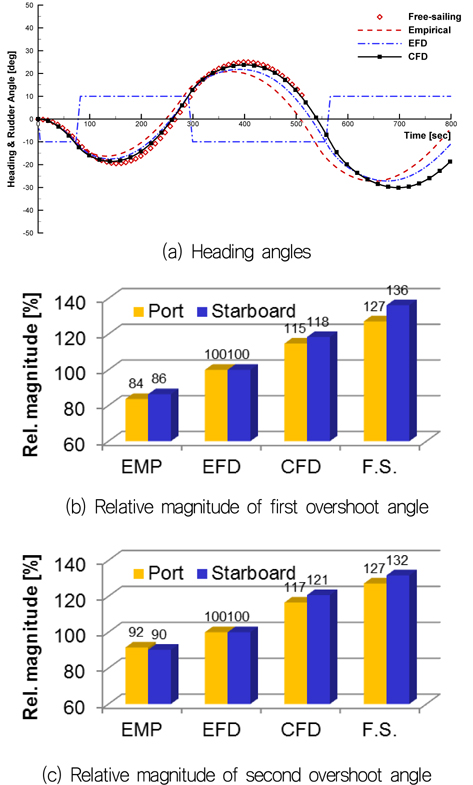
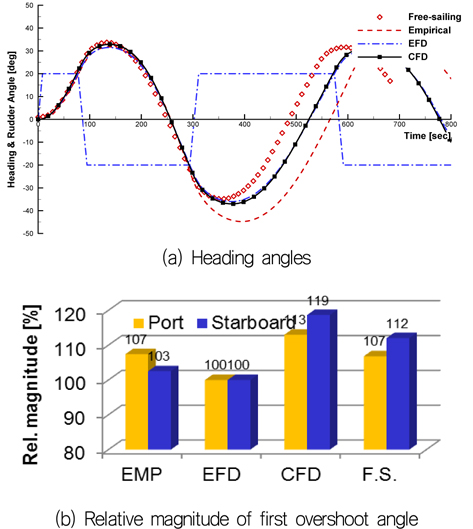
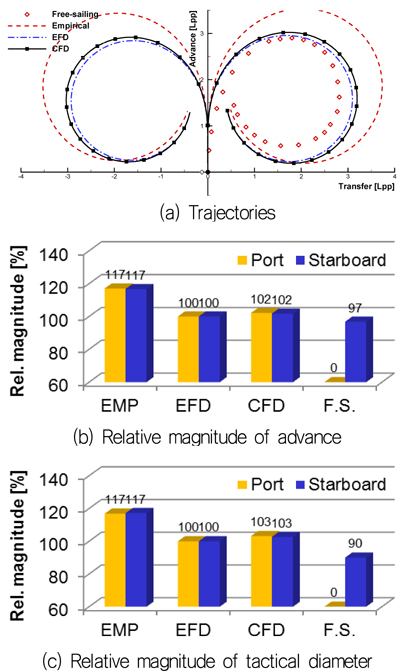
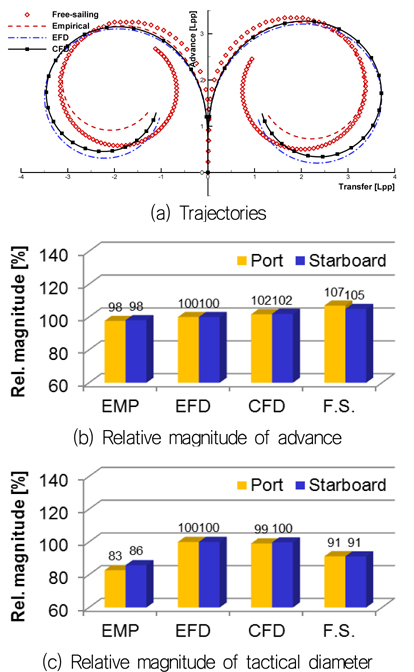
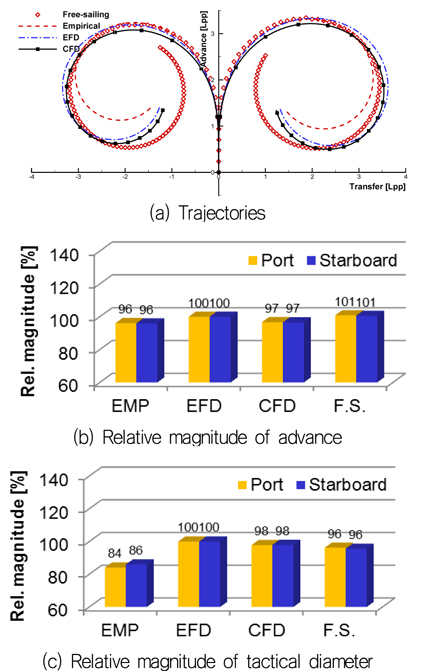
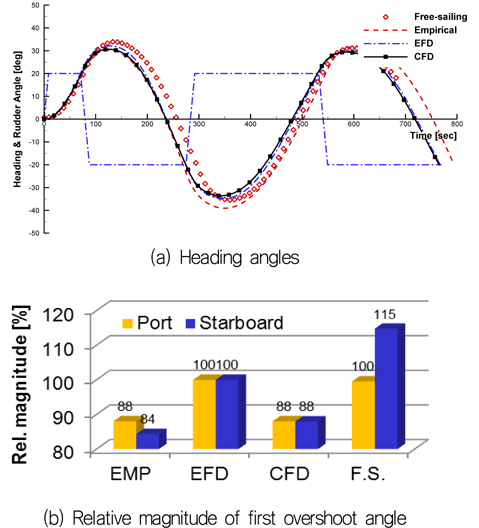
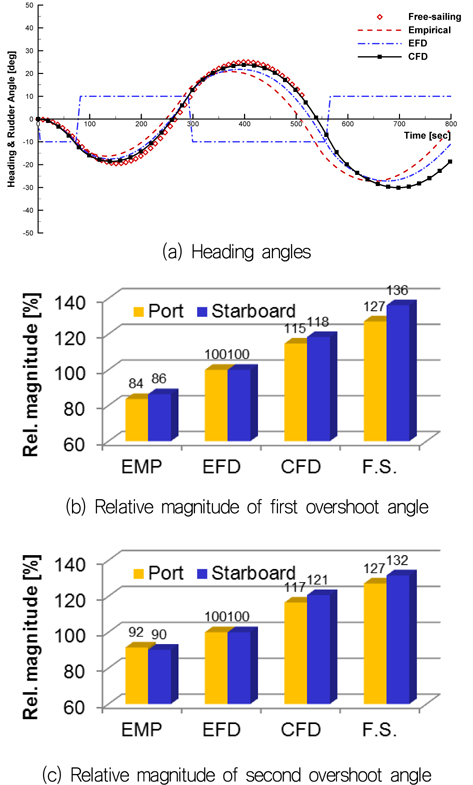
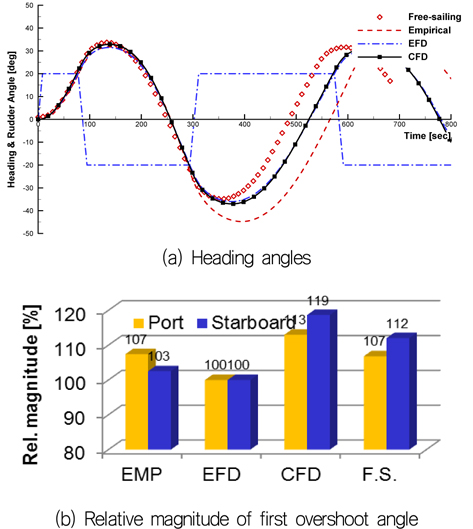
각각의 선회궤적과 오버슈트각은 자유항주시험(free-sailing, F.S.), 경험식(empirical), 구속모형시험(EFD), 가상모형시험(CFD) 결과를 비교하였다. 모든 시뮬레이션은 모형선 자항점에서 수행되었다. 자유항주시험은 SIMMAN 2008에 발표된 결과인데, KCS는 BSHC의 결과(1/52.667 축척)이며, KVLCC 1&2은 MARIN의 결과(1/45.714 축척)이다. 자유항주시험의 경우 각 기관이 보유한 프로펠러 중에서 날개 수와 모형선 축척에서의 직경이 유사한 프로펠러를 이용하기 때문에 본 연구에서 사용된 프로펠러와 전개 면적비, 피치비, 허브 비 등에 차이가 있다 (SIMMAN, 2008). 경험식, EMP, CFD는 모두 Table 3에 기술한 모형선에 적용한 결과이며 각각의 추진기는 SIMMAN에서 제공한 도면에 이용해 기하학적 상사를 만족시키도록 제작되었다. 한편, 본 연구에서 수행한 모형시험과 수치해석은 3자유도 모델을 바탕으로 하고 있는데, 자유항주시험은 횡동요가 구속되지 않은 조건이므로 차이가 발생할 수 있다. 기존 연구를 통해서 알려진 바와 같이 횡동요의 영향은 KVLCC와 같이 저속 비대선에서는 크지 않을 수 있지만, KCS와 같은 세장형 선박에서는 큰 차이가 나타날 수 있다. 따라서 자유항주시험과의 비교는 이러한 차이가 나타날 수 있음을 고려하고 검토할 필요가 있다. 경험식은 Sung, et al. (2009)이 발표한 선체 관련 미계수 추정식을 이용해서 미계수를 구하고 시뮬레이션을 수행한 결과이다.
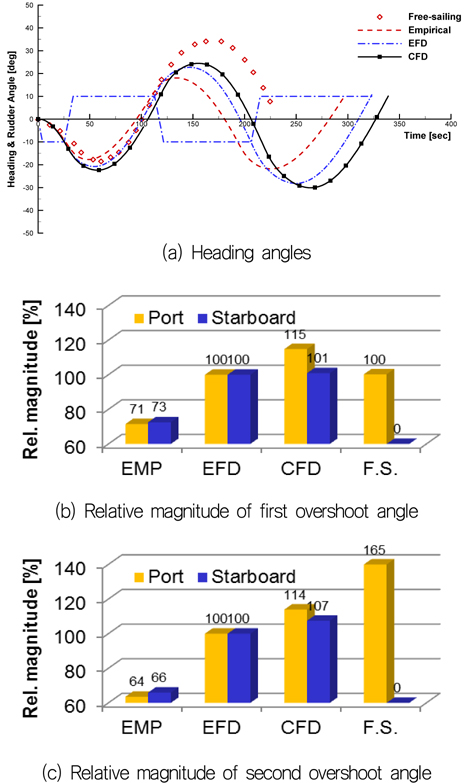
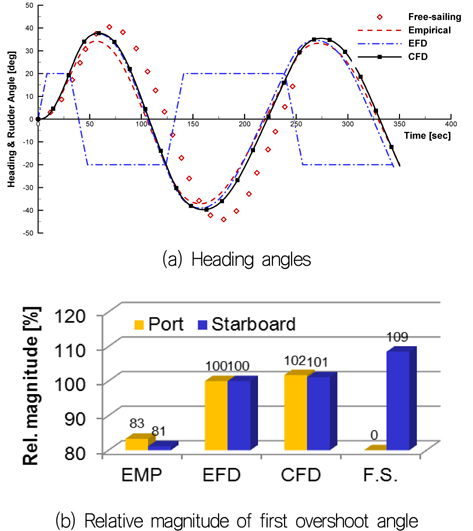
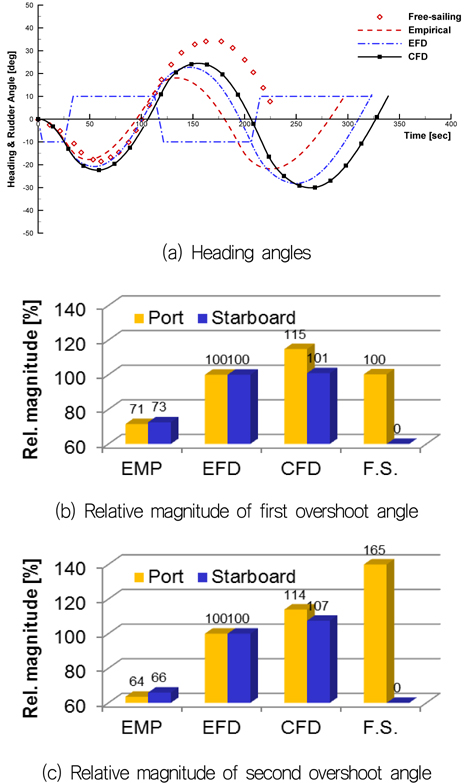
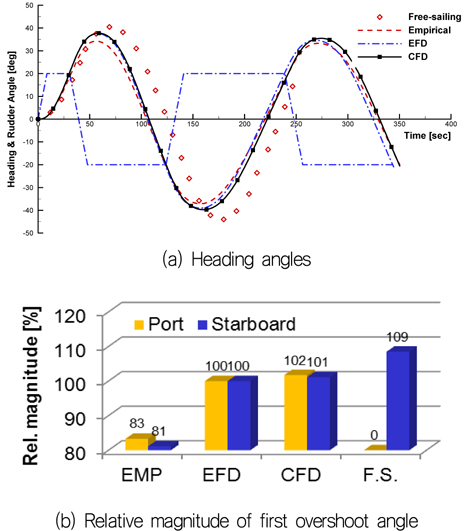
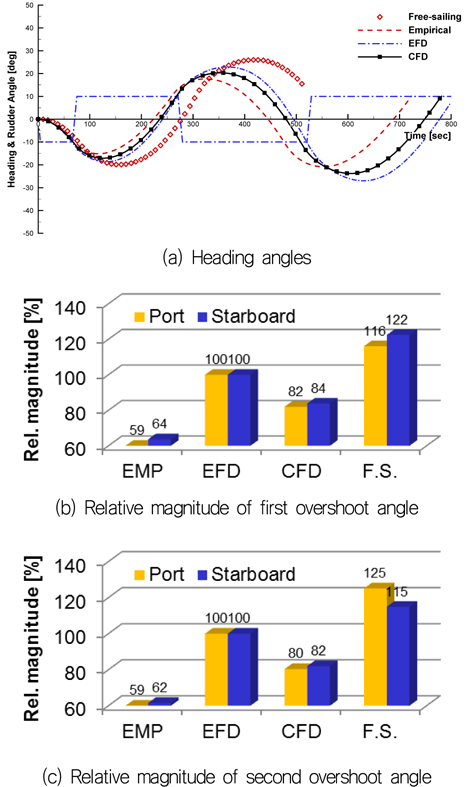
35도 타각 선회 시뮬레이션 결과는 Fig. 8~10과 같다. 각 그림에서 (a)는 선회궤적, (b)와 (c)는 EFD 대비 상대적인 전진거리와 선회직경이다. 모든 경우에 CFD는 EFD 대비 약 3% 가량의 오차범위에서 선회성능 지수를 보여주고 있다. 이해 반해 EMP는 약14~17% 정도의 차이를 보이고 있으며, F.S.는 3~10% 정도의 차이를 보이고 있다. F.S.의 경우 모형선의 축척과 프로펠러 형상 및 횡동요 구속여부 등의 차이로 인해서 나타나는 오차로 생각된다. EMP 보다는 CFD 결과가 EFD와 유사한 경향을 확인할 수 있으며, 이를 통해 가상 구속모형시험이 선형 변화에 따른 선회성능 지수판단에는 충분히 이용할 수 있다는 것을 알 수 있었다. 지그재그 시뮬레이션 결과는 Fig. 11~16과 같다. EFD 대비 CFD는 약 7~20%의 차이를 가지는 오버슈트 각을 추정하는 반면, EMP는 약 10~40%의 차이를 가지는 오버슈트 각을 추정하는 것을 알 수 있다. 이를 통해 선박의 기본 제원과 선미 형상 지수 일부만 이용하는 경험식 보다는 가상 구속모형시험을 수행하는 것이 모형시험과 유사한 추정 결과를 주는 것을 확인할 수 있었다. 이상의 시뮬레이션 결과를 바탕으로 할 때, 선체와 관련된 조종성 미계수 추정을 위해 개발된 가상 구속모형시험 기법이 실제 구속모형시험을 대체할 수 있는 가능성이 있음을 확인하였다.
본 연구에서는 초기 설계 단계에서 선형 변화에 따른 조종성능 변화를 수치적으로 검토해 볼 수 있는 프로세스를 상용 수치해석 코드를 이용해 개발하였다. 개발된 프로세스는 조종성능 연구의 표준 선형인 KCS와 KVLCC 1&2에 대한 구속모형시험 결과와 비교해서 검증하였다.
설계 단계에서 수치해석을 이용한 조종성능 평가를 보다 원활하게 수행하기 위해서는 사용자가 쉽게 사용법을 습득할 수 있어야 하고 경험이나 숙련도에 상관없이 일관성 있는 결론을 도출할 수 있어야 한다. 이를 위해서 사용자 편의성이 우수하고 기존의 연구를 통해서 유용성이 검증된 RANS 기반의 상용 프로그램인 STAR-CCM+를 이용하였다. 격자계 생성과 계산 기법 선택 등의 과정에서 발생할 수 있는 숙련도에 의존성과 시간 문제를 해결하기 위해, 해당 프로그램의 매크로 기능을 사용해 관련 과정을 자동화하였다. 이를 통해 계산 대상 선박의 CAD 파일이 동일한 경우 사용자에 관계없이 일관된 해석 결과를 얻을 수 있도록 하였다.
개발된 가상 구속모형시험 기법을 이용해 KCS와 KVLCC 1&2에 한 조종성 미계수를 추정한 결과, 기존 구속모형시험 대비 선형 미계수는 최대 11% 이내의 차이로 추정이 가능하였고 대부분의 비선형 미계수도 95% 신뢰구간의 범위 내에서 추정이 가능하였다. 일부 비선형 미계수가 95% 신뢰 구간을 벋어나는 경우도 있었지만, 이는 해당 선박의 모형시험 또는 조종운동 범위에서는 해당 미계수가 의미 있는 영향을 나타내지 못하기 때문인 것으로 분석되었다.
CFD로 추정된 미계수를 사용해 선회와 지그재그 시험과 같은 표준 조종시험을 시뮬레이션 한 결과, EFD 대비 선회성능지수는 3% 이내의 오차로 예측이 가능하였고, 오버슈트 각은 7~20%의 오차로 평가 되었다. 기존에 이용되던 경험식 기반의 시뮬레이션이 선회성능지수에서 14~17%, 오버슈트 각에서 40%까지의 오차를 주는 것을 고려한다면, CFD를 이용하는 것이 경험식 보다는 모형시험에 가까운 평가 결과를 주는 것을 알 수 있다.
이상의 비교를 통해, 개발된 수치해석 프로세스가 설계단계에서 선형에 따른 조종성능을 비교 검토하는데 유용한 도구로 사용될 수 있음을 알게 되었다. 향후에는 보다 많은 구속모형시험 결과와의 비교를 통해서 검증을 하는 것은 물론이고, 본 연구에서 구하지 못한 횡동요의 영향 및 타, 프로펠러 간섭계를 수치적으로 계산하여 유용성을 높이는 한편, 유동 가시화 등을 통해 국부 선형 변화가 조종성능에 미치는 영향 분석 등에 이용하고자 한다.