우리나라의 대표적인 주거 형태는 공동 주택이다. 이로 인해 생활 소음과 관련된 민원 발생이 급증하고 있는 상태이다. 이에 실생활에서 주변 소음으로 인해 고통을 받는 경우에는 소음 측정기로 측정하여 민원을 제기할 수도 있다. 그러나 일반가정에서는 전문적인 장비를 동원해 소음 측정을 하기가 어렵기 때문에 간편하게 스마트폰 앱을 사용하는 경우가 많다. 기존에 출시된 소음 측정 앱은 동일한 조건에서 측정하여도 값이 다르게 나오는 등 정확도가 현저히 떨어지며, 실제 소음 측정을 위한 목적으로 사용하기가 어렵다. 따라서 본 논문은 스마트폰을 이용한 생활환경의 소음 측정을 위한 모바일 데이터 처리 시스템을 제안한다. 본 연구의 기대 효과는 장비가 없는 가정에서 간편한 소음 측정 및 소음이 발생된 방향을 추정하여 민원 처리의 자료로 활용할 수 있다.
Korean representative residence type is apartment house. Due to this, civil complaint related to living noise is rapidly increasing. Here, in case when they suffer from surrounding noise in daily life, they can raise civil complaint. However, in general home, it is difficult to measure noise utilizing expert equipment, in many cases they use smart phone app. Noise measurement app that was previously released has markedly low correctness, e.g. value is differently measured in the same condition, therefore, it is difficult to be used for the actual noise measurement. Therefore, this paper suggests mobile data process system for noise measurement of living environment utilizing smart phone. The expected effect of this research can be utilized as the civil complaint material by conveniently measuring the noise and presuming the direction that the noise appeared at the home that has no equipment.
도시화가 진행되면서 생겨난 우리나라의 대표적인 주거형태는 공동 주택이다. 오늘날 공동 주택은 도시에 가장 알맞은 형태이지만 여러 세대가 함께 모여서 생활하기 때문에 생활 소음이 심각한 문제로 대두되고 있으며, 층간 소음의 문제가 이웃 간의 분쟁에서 사회 문제로 확대되고 있다. 민사 소송의 환경 분쟁 조정 신청 사유 중 90% 이상이 ‘소음 및 진동 피해’로, 생활 속에서 소음이 공동 주택 거주자들의 생존권에 직접적인 영향을 준다고 볼 수 있다.
국가에서는 생활 소음과 관련하여 법과 제도적 절차를 마련하여 이를 해결하고자 하지만 공동 주택 바닥 구조의 특성 및 경제적인 여건, 거주자의 주관적인 요구 수준 등을 종합적으로 고려할 때 소음을 완전히 해결하는 것은 많은 어려움이 존재한다.
이를 해결하기 위해 각 공동 주택에서는 층간 소음 관리 위원회를 구성하고, 시범 아파트 지정 및 관리 규약 제정으로 거주자들의 생활 소음에 대한 의식을 개선하는 방법을 통해 소음을 줄이고, 이웃 간의 분쟁 조정이나 민사 소송에 대한 도움을 주고 있다.
그러나 공동 주택에서 일어나는 소음에 대한 반응은 개인의 주관적인 반응에 따라 피해정도가 다르기 때문에 소음 문제에 대한 객관적인 자료를 제시하기가 어렵다. 이에 측정 기계로 소음의 크기를 정확하게 측정하고, 측정된 결과 값을 이용해 소음으로 인한 자신의 피해를 증명하는 방식으로 민원을 제기할 수 있다.
일반 가정에서 소음을 측정하기 위한 방법으로는 전문 업체에 의뢰를 하는 방법과 국가에서 주관 및 운영하는 층간 소음 이웃 사이 센터에 상담을 신청하여 현장 진단 신청을 받는 방법이 있으나, 많은 비용과 시간을 필요로 한다.
이에 일반 가정에서는 스마트폰 앱을 사용하여 간편하게 소음 측정을 하는 경우가 많다. 논문 [2, 3]은 소음 측정을 위한 앱에 대해 정확도를 평가하고 있으며, 소음 측정 결과는 동일한 조건에서 소음을 측정하여도 앱마다 측정값이 다르게 나오는 등 정확도가 현저히 떨어져 실제로 소음 측정을 목적으로 앱을 사용하기에 어려움이 많은 것으로 나타났다.
기존에 출시된 소음 측정을 위한 앱은 1회 또는 실시간 측정을 통하여 소음을 측정하고 있다. 하지만 전문 업체 및 국가 센터에서는 최소 2회 측정과 현장 검증을 실시하고 있으며, 기존의 앱과 같이 단발적인 방법으로는 앱에서 측정된 측정값의 신뢰도가 떨어진다는 단점이 존재한다. 이에 동일한 환경에서 측정하였을 때 앱을 통해 측정된 값의 정확도를 높이기 위해서 소음의 측정 횟수를 늘려 소음 측정값의 정확도 및 신뢰도를 높여야 한다. 또한 생활 소음의 경우 대부분 윗집과 아랫집 사이의 문제지만 간혹 옆집과 옆집 또는 대각선 방향으로 윗집과 아랫집 사이의 문제인 경우도 존재한다. 이에 소음을 측정할 때, 소음이 발생하는 방향을 확인할 수 있다면 보다 상세한 자료로 사용할 수 있다.
따라서 본 논문은 소음 관련 민원 제기 시 추가 자료로 활용할 수 있는 소음 측정 및 방향 추정 기능을 가진 생활 환경의 소음 측정을 위한 모바일 데이터 처리 시스템을 제안한다.
논문의 구성은 다음과 같다. 2절에서는 소음 및 측정과 관련된 연구와 마이크로폰 센서를 이용한 방향 추정 방법에 대하여 논하고, 3절에서는 본 논문에서 제안한 생활 환경의 소음 측정을 위한 모바일 데이터 처리 시스템에 대해서 기술한다. 4절에서는 구현 및 분석, 5절에서는 결론 및 참고문헌 순으로 기술한다.
논문 [1]은 층간 소음과 관련한 법규 및 규제가 실제 거주지에서 발생하는 층간 소음을 잘 반영하지 못해 문제가 되고 있는 부분에 대해 실험 대상 아파트 주민들을 대상으로 설문 조사를 실시하였다. 설문 조사는 AHP 분석을 이용하였으며, 층간 소음의 만족도에 대한 결과로 ‘심각하다’ 또는 ‘거슬린다’ 라고 응답한 설문자들이 약 70%로 나타났다.
논문 [2]는 소음 측정을 위한 앱에 대하여 정확도 평가를 실시하였다. 측정에 사용한 스마트폰의 종류로 아이폰을, ‘소음 측정’ 관련 검색어를 통해 검색된 62개의 앱들 중 37개를 선정하였다. 측정 결과에서 31개의 앱이 보통 소음계의 오차 범위 ±2dB를 초과하였고, 18개의 앱이 오차 범위 ±5dB를 초과, 13개의 앱은 오차 평균이 ±11dB로 나타났다. 이를 통해 출시된 대부분의 앱이 실제 소음을 측정하는 목적으로 보기가 어려워 사용시 주의가 필요하였다.
논문 [3]은 작업장에서 소음 노출을 평가하기 위해 사용할 수 있는 스마트폰 사운드 측정 앱의 정확성에 대해 평가하고, 적절한 소음 측정을 위해 이용될 수 있는지 여부에 대해 분석하였다. 실험 조건으로 소음의 크기는 65-95dB의 범위 내에서 5dB씩 증가시켰고, 20kHz의 주파수 범위를 가지는 핑크 노이즈를 사용하였다. 총 20개의 아이폰 앱과 안드로이드폰 앱을 사용하여 실험한 결과는 특정 범위내의 소음 크기를 측정하는 경우에 한하여 0.07dB의 평균 오차를 가지는 것으로 나타났다.
기존 논문 [1-3]은 스마트폰의 소음 측정 앱에 대하여 정확도를 검증하고 있으며 실제 소음 측정기계의 오차율인 2dB이 넘는 앱이 많았으며 특정 환경에서만 정확도가 높은 앱의 경우도 포함되어 있었다. 이에 스마트폰의 마이크로폰 센서를 이용하여 소음을 측정할 때, 정확도를 높이기 위하여 측정값을 보정하는 단계가 필요하다.
논문 [4]는 로봇의 목표물 위치 추적에 대한 알고리즘을 제안하고 있으며, 소리의 세기 차이를 이용하는 방법으로 음원 추적 센서를 사용하였다. 모바일 로봇은 센서를 중심으로 하는 음원의 좌표를 생성하고 음원이 발생한 쪽의 방향을 찾아 대략적인 방위를 유추하고 음원 추적 장치를 통해 4개의 실험 영역을 구분해 낼 수 있었다.
논문 [5]는 마이크로폰을 이용하여 소리의 위치를 추적하는 시스템을 제안하고 있으며, GCC-PHAT 방식을 이용하여 4개의 마이크로폰 간 소리의 시간 도달차를 구하고, 구해진 시간 도달차를 바탕으로 Iterative Least Square 방식을 사용해 최적의 위치를 구하는 방법을 사용하였다. 4개의 마이크로폰을 이용한 실험 결과는 추정된 위치와 실제 위치 간의 정확도를 구했을 때 센티미터급의 정확도를 얻을 수 있었다.
논문 [6]은 애드혹 네트워크 마이크로폰에서 마이크 및 스피커, 토커의 두 위치를 추정하기 위한 방법을 제안하였다. 회의실에서 참가자가 회의 테이블 위에 노트북을 두고, 노트북에 내장된 마이크로폰 세트로 대화를 하는 상황을 가정하고 성능 평가를 하였으며, 마이크로폰 간의 실제 위치와 추정 위치 간의 오차는 22cm가 발생하였다.
논문 [7]은 도착 시간 차이를 이용하여 마이크와 음원의 위치를 복구하는 방법을 제안하고 있다. 평면형 마이크로폰 어레이를 ‘유닛 큐브’라고 하는 격자 구성으로 배치하여 소리의 도착 시간을 계산하고 있으며, 위치 추정을 하고 있다.
논문 [8]은 3개의 마이크로폰을 이용하여 이동 로봇에서 음원을 추적하는 알고리즘을 제시하고 있으며, 소리가 각각의 마이크로폰까지 도달하는 시간을 계산하여 마이크로폰으로 들어오는 각도 정보를 구하는 방법을 사용하였다. 각도 정보를 통해 소리의 좌표를 구하는 알고리즘을 이용해 실험한 결과는 기존의 Threshold 방법에 비해 제안된 방법을 사용하였을 때 3~10% 더 정확한 결과를 보였다.
기존 논문 [4-8]은 마이크로폰 어레이 등의 전문 장비를 이용하여 방향 추정을 하고 있기 때문에 제한적인 실험 환경에서 성능 평가를 한 사례가 많았다. 이는 실제 일반 가정의 사례에 적용하기가 어렵다는 문제점이 있어 많은 사람들이 사용하는 스마트폰으로 소음 측정 및 방향 추정을 쉽게 할 수 있는 방법이 필요하다.
따라서 본 논문은 스마트폰에서 마이크로폰 센서를 통해 소음을 측정하고 측정된 소음을 이용해 소음의 방향을 추정하는 생활 환경의 소음 측정을 위한 모바일 데이터 처리 시스템을 제안한다.
Ⅲ. 생활 환경의 소음 측정을 위한 모바일 데이터 처리 시스템
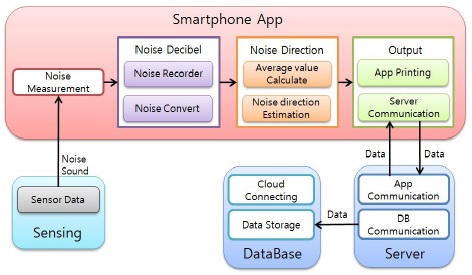
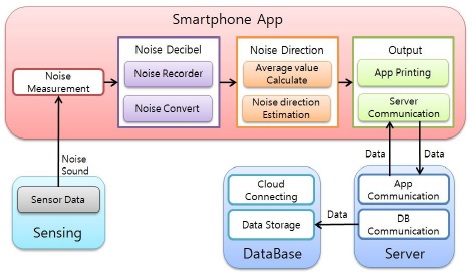
본 논문에서 제안한 모바일 데이터 처리 시스템의 전체 시스템 구조는 그림 1과 같다.
시스템 구조는 크게 센싱(Sensing), 스마트폰 앱, 서버 및 데이터베이스로 구성된다. 센싱(Sensing)에서 존재하는 센서 데이터 값은 스마트폰 앱을 실행시키면 소음 측정(Noise Measurement) 단계에서 스마트폰의 마이크로폰 센서를 통해 측정된다.
소음 리코더(Noise Recorder) 단계에서는 측정된 소음 데이터 값들을 AudioRecoder 기능을 이용하여 실시간으로 데이터 값들을 저장하고, 저장된 값들을 이용하여 소음 변환(Noise Convert) 단계에서 측정된 소음 값을 데시벨로 변환한다.
소음 리코더 단계에서 변환한 데시벨 값을 이용하여 소음의 방향을 추정한다. 평균값 계산(Average value Calculate) 단계에서 3회의 소음을 측정을 하고, 측정된 값들의 평균값을 계산한다. 계산된 값들 중 제일 작은 값을 기준인 1비율로 두고, 나머지 2개의 값들을 기준 값에 대한 비율로 변환하는 과정을 거친다.
소음 방향 추정(Noise direction Estimation) 단계에서는 변환된 3개의 값들을 이용하여 벡터 계산을 수행하고, 현재 스마트폰의 위치를 기준으로 소리 값의 위도와 경도를 찾아 방향을 추정한다.
소음 측정 및 연산이 끝나면, 스마트폰의 화면을 통해 사용자에게 소음의 크기와 방향을 이미지와 텍스트를 통해 디스플레이하고, 서버로 측정된 소음의 크기와 방향을 전송한다.
서버는 데이터베이스에 연결하여 실시간으로 소음의 크기와 방향에 대한 데이터를 데이터베이스에 저장한다.
본 논문은 소음 측정 및 방향 추정을 위하여 스마트폰에서 편리하게 사용할 수 있는 마이크로폰 센서를 이용하였다.
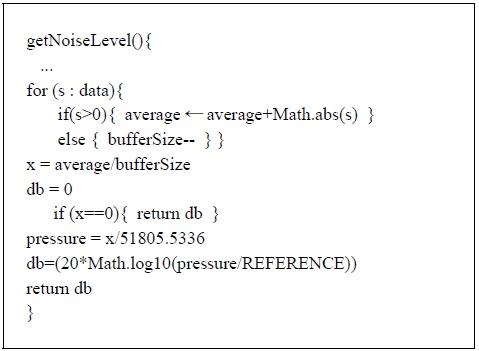
스마트폰에 내장되어있는 마이크로폰 센서를 통해 소리를 입력받아 데시벨로 변경하여 크기를 알아낸다. 소음의 상대적인 크기를 나타내는 데시벨(dB) 단위는 소리의 세기의 비 값을 상용로그로 취해준 다음 10을 곱해서 얻을 수 있다. 따라서 10dB이 증가할 때마다 소리는 10배 커진다. 소음 크기의 계산식은 식(1)과 같다.

식(1)을 이용하여 소음의 크기를 계산하는 알고리즘은 표 1과 같다.
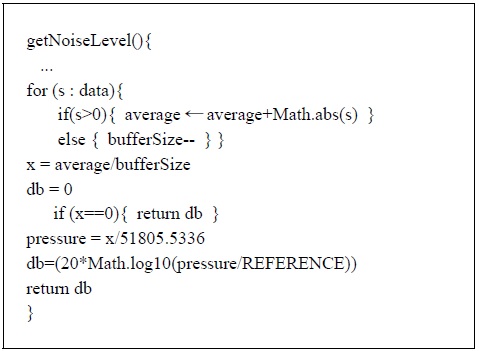
소음 크기 계산 알고리즘
표 1에서 구해진 데시벨 값을 이용해 소음의 크기를 계산할 수 있으며, 연속적으로 소리를 3회 측정하여 스마트폰의 위치를 기준으로 방향을 추정한다. 공기 중에서 소리의 속도(음속)는 약 340m/s이고, 거리 1cm를 이동하는 시간은 약 29us이다.
하지만 스마트폰의 마이크로폰 센서에서 소리의 크기 변화를 감지할 수 있는 최소 측정 단위는 ms이므로 음파의 속도는 측정이 불가능하다. 따라서 벡터 계산 방법을 이용하여 방향을 추정하도록 하는 알고리즘을 사용하였다.

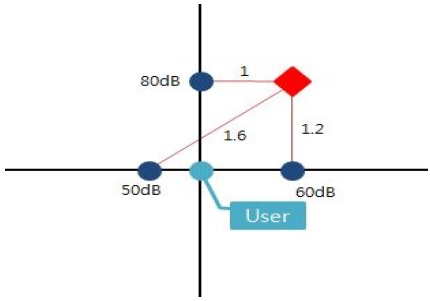
식(2)를 이용한 알고리즘의 계산 방식은 3회의 소음 측정을 통해 각각의 평균값을 계산하고, 그 중 제일 작은 값을 기준 값인 비율 1로 두고 나머지 2개의 값들을 기준 값에 대한 비율로 변환한다. 변환된 3개의 값들을 이용하여 벡터 계산을 하면 스마트폰의 위치 값을 기준으로 소리 값의 위도와 경도를 예상할 수 있으며, 방향에 대한 추정이 가능하다.
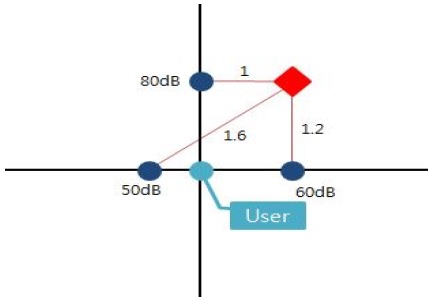
그림 2는 벡터 계산을 통해 소리에 대한 위치를 추정하는 방법을 보여준다.
그림 2에서 현재 “User”의 위치를 중심점 위도와 경도를 0점으로 두고, 0점과 다른 점들 간의 기울기로 벡터 값을 산출하여 방향을 찾을 수 있다.
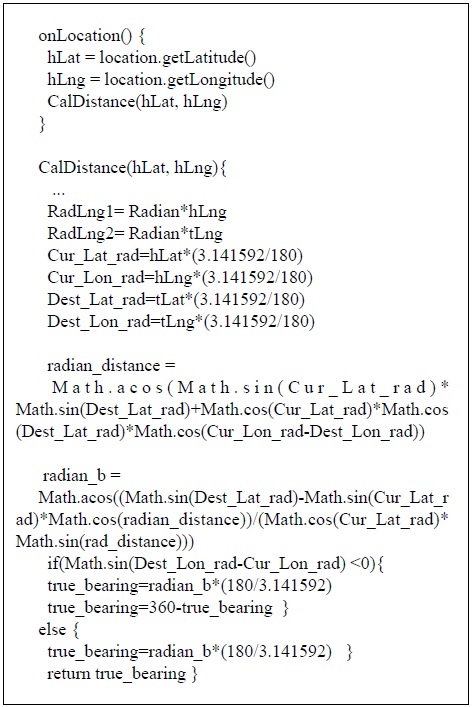
변환된 길이 값을 통해 소음의 근원지 위치를 특정하고 목표 위치로 둔다. 현재 위치와 목표 위치의 거리와 방향각은 라디안으로 변환하여 계산한다.
위도와 경도의 1도는 약 111km로 실내 위치 계산의 정확도를 위해 위도, 경도 값의 소수점 7번째(약 10cm 단위), 8번째 자리(약 1cm 단위)를 이용해 비교한다. 라디안으로 변환한 위도·경도를 이용한 방향 추정을 계산하는 알고리즘은 표 2와 같다.
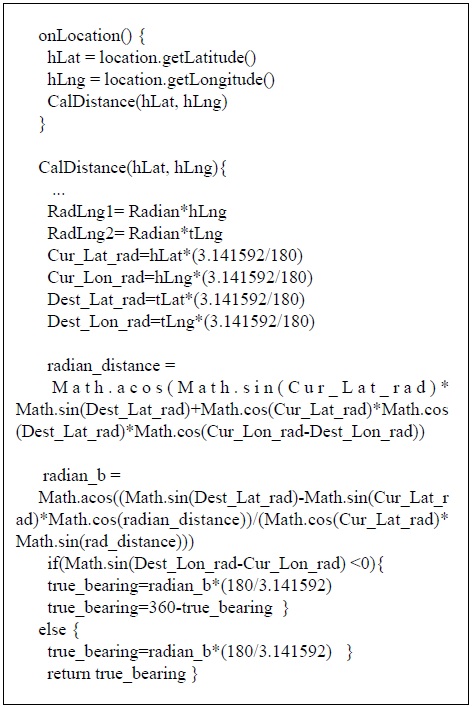
방향 추정 계산 알고리즘
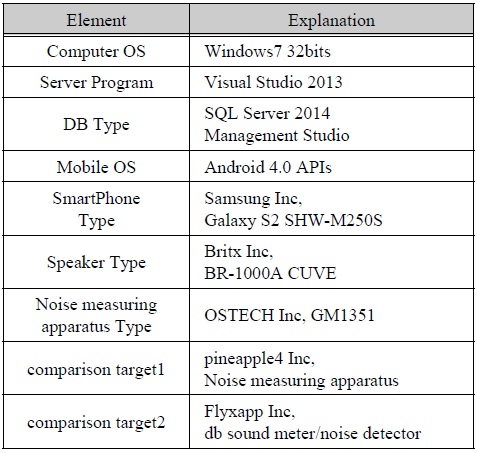
본 논문에서 구현한 실험 환경은 표 3과 같으며, Android의 기능 중 ViewPager 기능을 이용하여 개발하였다.
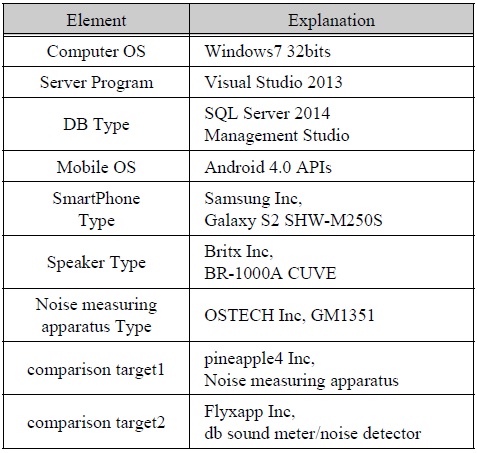
실험 환경
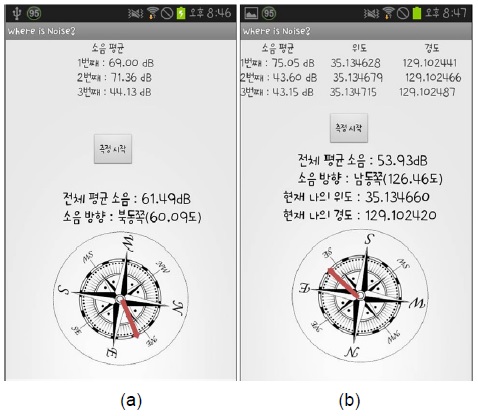
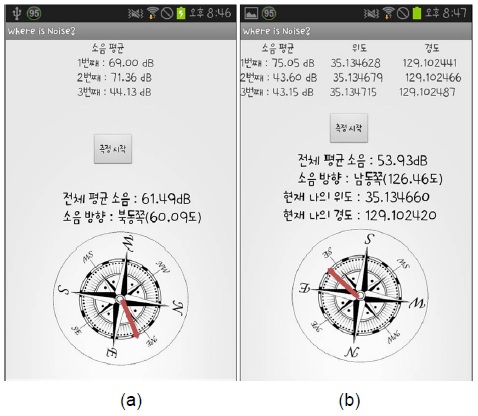
본 논문에서 제안한 소음 측정을 위한 모바일 데이터 시스템의 실행 결과는 그림 3과 같다.
본 논문에서 제안한 앱의 실행 과정은 3회의 소음을 측정하고, 측정 시 소음의 방향을 추정하여 위도와 경도 값을 계산한다. 측정 결과는 텍스트와 나침반 이미지로 디스플레이하며, 전체 평균 소음값과 소음 방향의 추정값을 보여준다.
그림 3의 (a)는 간단 버전으로, 3회의 소음 측정과 평균 소음, 소음 방향을 값으로 나타내고, 화면의 나침반 이미지에 스마트폰의 위도와 경도를 기준으로 소음의 방향을 붉은 화살표로 표시한다. 그림 3의 (b)는 상세 버전으로, 간단 버전의 내용에 현재 위치의 위도와 경도 값과 측정된 소음 방향의 위도와 경도를 추정하여 값을 나타낸다.
본 논문에서 제안한 방법의 성능 평가는 다음과 같다. 먼저, 앱의 소음 측정 성능을 평가하기 위하여 MC² Method[9]에서 무료로 배포하는 생활 소음 9종류 22개와 기타 소음 7종류 13개로 이루어진 테스트용 음원 35개를 사용하였다.
실험 방법은 연구실에서 컴퓨터로 음원을 실행하고 스피커와 스마트폰 3대, 소음 측정기의 거리를 동일하게 50cm를 띄운 상태에서 측정하였다. 실험에서 사용한 소음 측정계[10]는 한국 공업 규격인 KS 규격을 준수하는 소음계를 사용하였고, 소음 측정기앱[11]과 db 사운드미터/노이즈검출기[12]는 안드로이드 구글 마켓에서 평점이 5점을 기준으로 4.5점 이상인 앱을 선택하였다. 평가 기준은 소음 측정계[10]의 측정값이 정확도 100%를 가진다고 가정하고, 기준과 각 앱의 소음 오차 크기를 비교하였다.
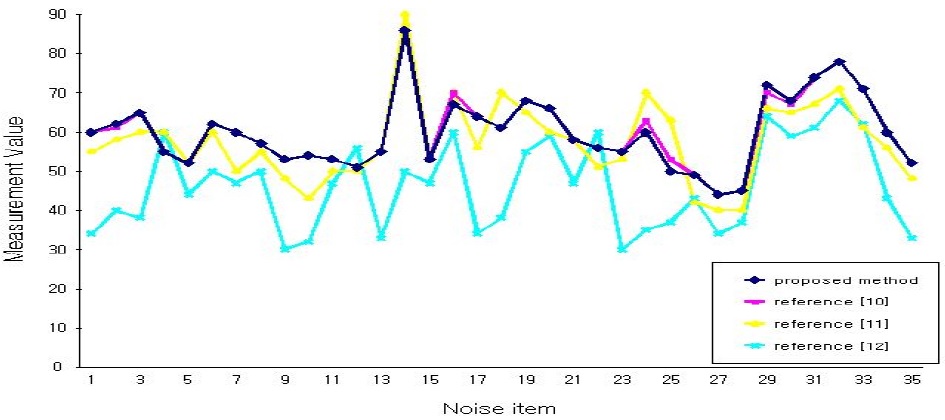
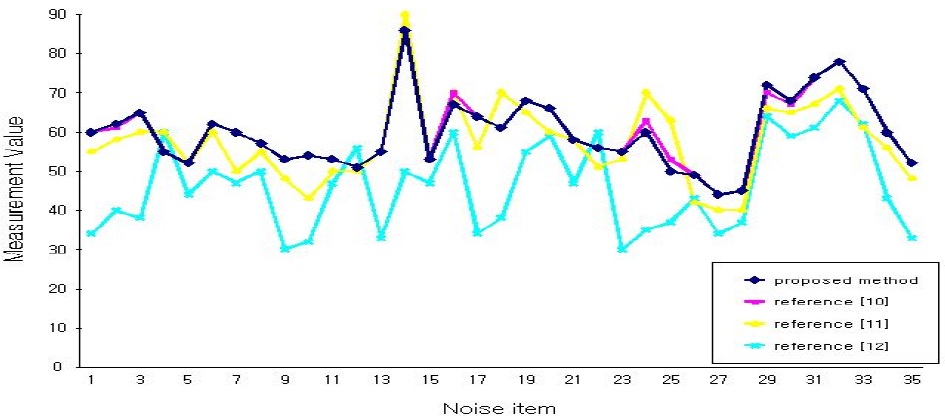
그림 4는 성능 평가를 위해 테스트용 소음 음원을 소음 측정계[10], 소음 측정기앱[11], db사운드미터/노이즈검출기[12]와 본 논문에서 제안한 방법으로 측정한 결과이다.
실험결과, 본 논문에서 제안한 방법이 소음 측정계 [10]과 비교하여 35개의 음원 중 29개의 음원에서 100%의 정확도로 나타났으며, 6개의 음원에서 2.32dB의 오차가 발생하였다. 그리고 참고 문헌 [11]에서는 5개의 음원에서 100%의 정확도를 나타내고, 평균적으로 4.78dB의 오차가 발생하였다. 참고 문헌 [12]에서는 100%의 정확도를 가지는 음원이 없었으며, 평균적으로 14.39dB의 오차가 발생하였다. 따라서 그림 4와 같이 본 논문에서 제안한 방법을 이용한 앱으로 소음을 측정할 때, 전체 82.8%의 정확도로 확인되었다.
방향 추정 기능의 성능 평가를 위하여 연구실의 지름 1~5m 거리를 정하였다. 그리고 기준인 소음 발생의 방향과 각도를 정하고 해당 방향에서 소음을 실행하여 그 방향을 찾는 정확도를 실험하였다.
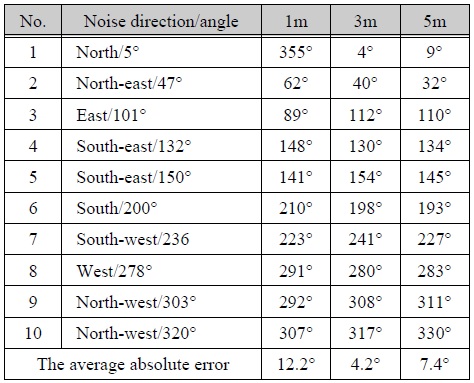
표 4는 본 논문에서 제안한 방법으로 구현된 앱에서 소음의 방향의 정확도를 실험한 결과이다. 방향 추정의 결과는 소음과의 거리가 3m일 경우의 절대 오차 평균값이 4.2°로 가장 작았으며, 5m일 경우에는 7.4°, 1m일 경우에는 12.2°의 정확도가 나타나는 것을 확인되었다. 1m의 경우에서 오차 평균값이 큰 이유는 3회의 측정을 할 때, 측정 위치간의 거리가 가까워 방향 추정의 계산 부분에서 정확도가 떨어지는 것으로 판단된다.
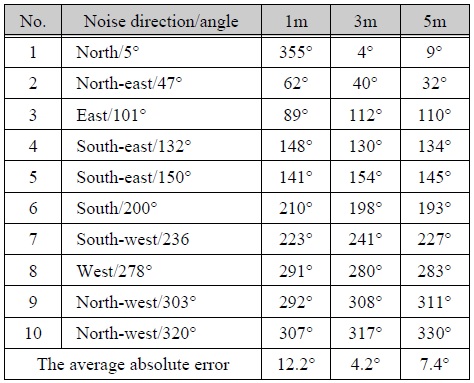
방향 추정 정확도 실험 결과
논문 [8]은 마이크로폰 어레이와 이동 로봇을 이용하여 각도를 측정할 때 2~3도의 오차가 나타났고, 본 논문에서 제안한 방법 또한 이와 비슷한 성능으로 스마트폰에서 방향 추정이 가능하였다.
본 논문은 전문 장비를 갖추고 있지 않은 일반 가정에서 간편하게 주변의 소음을 측정하고 측정된 값을 객관적인 자료로 사용할 수 있도록 하기 위해 생활 환경의 소음 측정을 위한 모바일 데이터 처리 시스템을 제안하였다. 동일한 환경에서 각각의 앱들을 동시에 소음을 측정한 결과, 본 논문에서 제안한 앱이 약 83%로 참고 문헌 [11, 12] 중에서 가장 정확도가 높은 것을 확인할 수 있었다. 방향 추정의 결과는 소음과의 거리가 3m일 경우에 오차 평균값이 4.2°로 나타났으며 스마트폰에서 비교적 정확한 방향 추정이 가능한 것을 확인할 수 있었다.
모바일 데이터 처리 시스템을 이용하면 편리하게 소음 측정 및 방향 추정을 할 수 있고, 이를 바탕으로 소음 관련 민원 시 자료로 활용할 수 있으므로 민원 처리의 시간과 비용 절감에 도움이 될 수 있다.