802.11p WAVE is the next-generation wireless communication that can make Ad-hoc network communication possible for Vehicle-to-Vehicle. GBSR protocol, one of the 802.11p WAVE protocols, mainly focuses on improvements in networks that have a tendency to disconnect. However, it does not consider the transmission time and velocity of a packet thus, there is a disadvantage of there being a delay in the transmission velocity, in urgent situations like car accidents, emergency patients transportation and crimes. In this paper, we proposed A-GBSR protocol for transmission of a packet to mobile node which has a high speed through the improved beacon message and Adaptive Neighbor list Management that are considering of the GBSR protocol transmission velocity.
자동차는 현대 문명의 발전과 그 궤를 같이하며 성장했다. 최근 802.11p WAVE(Wireless Access in Vehicular Environment)[1,2] 차량 간 통신 기술을 이용한 도로위의 운전자 안전서비스와 교통흐름 개선을 위하여 차량 통신 기술의 필요성이 대두되고 있으며 이러한 배경으로 VANET(Vehicular Ad-hoc Network)기반의 차량 간 무선통신 기술에 대한 연구가 활발히 이루어지고 있다[3].
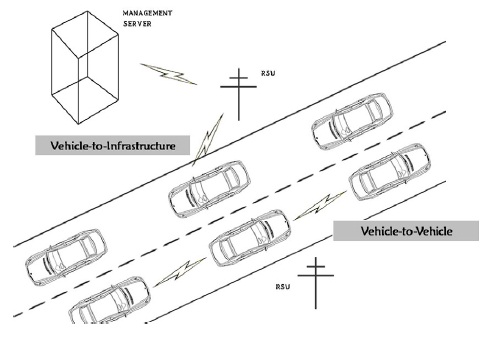
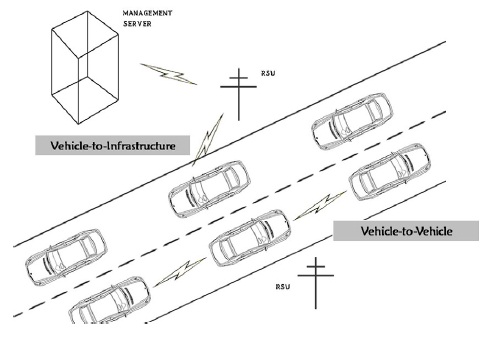
VANET의 통신 방식은 그림 1과 같이 V2I(Vehicular To Infrastructure)와 V2V(Vehicular To Vehicular)로 구분된다[4]. V2I는 차량과 도로에 위치한 RSU(Road Side Units)와 같은 도로변 인프라를 이용하여 도로의 교통 상황이나 인터넷 서비스를 차량에 제공하는 기능으로 차량에 IP 기반의 교통 정보 및 안전을 지원하고 다운로드 서비스를 제공한다. V2V는 차량 간 무선 통신 기반으로 차량 추돌경고 서비스 및 그룹 통신을 제공하여 교통사고 등 차량 운전자의 안전을 도모할 수 있다[5].
VANET 환경에서는 기지국 없이 노드 간 통신을 해야 하기 때문에 라우팅의 설계가 중요하다. 도심도로 환경에 적합한 라우팅의 하나로 위치기반의 대표적인 라우팅 프로토콜인 GBSR(Greedy Border Superiority Routing)[6]은 이웃노드 리스트 관리(ANM: Adaptive Neighbor list Management)를 통하여 GPSR(Greedy Perimeter Stateless Routing)[7]보다 성능이 향상되었지만 탐욕경계우위 부분의 중계노드의 수를 줄이더라도 패킷 전송 지연시간이 초래되는 문제는 여전히 남아 있다. 이에 본 논문에서는 개선된 비콘메시지를 이용하여 효율적인 이웃노드 관리를 통한 패킷 전송속도의 향상과 패킷 전송시간이 단축된 A-GBSR (Advanced-Greedy Border Superiority Routing) 프로토콜 설계를 제안한다.
비콘(beacon)은 특정한 주파수를 가지고 일정한 주기로 전송되는 비지향성으로 자신의 존재를 알려 다른 노드의 위치를 찾아서 서로 신호를 주고받을 수 있는 무선 전송 프레임 신호이다[8].
무선 네트워크에서는 노드의 위치를 찾기 위해 브로드캐스팅(broadcasting)으로 비콘메시지를 보내어 위치를 찾아서 무선 네트워크에 참여하도록 주기적으로 전송한다. 소스노드에서 목적지노드까지 최대한 빠르게 패킷을 전송하기 위해서 중계노드를 선정하는데, 이때 비콘메시지를 통해서 중계노드의 위치를 파악하고 다음 노드에게 패킷을 전송할 수 있도록 하는 역할을 한다.
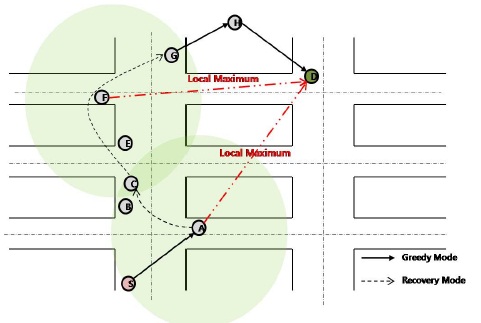
GBSR은 그리디 포워딩(greedy forwarding) 방식을 사용하며, 이웃노드 리스트 관리 기법과 무선 커버리지 경계부분의 노드에게 전달하는 방법을 사용하여 패킷을 전달하므로 중계노드의 수를 줄여 로컬맥시멈을 최대한 빨리 탈출할 수 있고 패킷전송 시간을 단축할 수 있다[3].
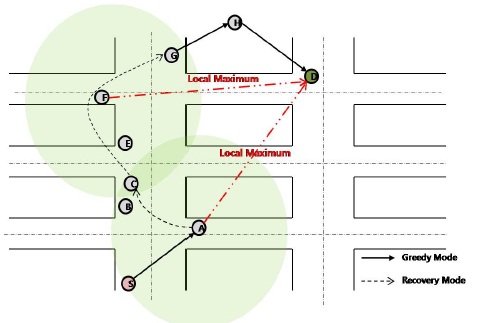
그림 3과 같이 A에서 D까지 로컬맥시멈에 직면하면 진행모드는 복구모드로 변환되고 패킷은 B,E,F의 노드를 거치지 않고 A→C와 C→G와 같이 무선 커버리지 내의 가장 먼 거리 노드에게 패킷 전송하여 복구모드를 빨리 탈출할 수 있다. 하지만 GBSR은 중계노드의 수를 줄여 복구모드를 빨리 탈출 할 수 있지만 로컬맥시멈에 직면하면 패킷 전송시간 지연 등의 문제점은 여전히 남아있다.
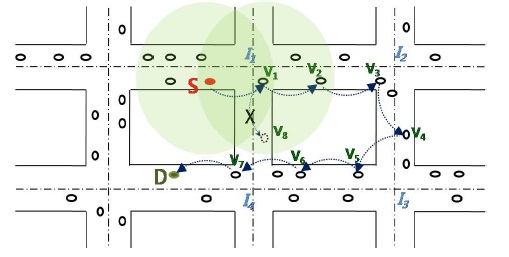
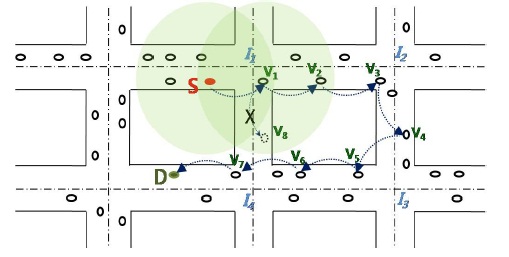
GBSR을 이용한 교차로모드에서는 그림 4와 같이 도심에서의 직선과 교차로가 있는 그리드 형태의 도로에서 GBSR의 전송방식으로 무선 커버리지 경계부분의 노드에게 패킷을 전달함으로써 목적지노드까지 최단거리를 찾아 패킷을 전송하는 방식이다.
한편, V1노드가 I1교차로에서 V8노드를 만나지 못할 경우 진행모드는 복구모드로 변환되고 동시에 자신의 패킷을 복제하여 I1교차로에 진입하는 다른 노드에게 전달한다. 그리고 I1교차로에서는 V8노드가 나타날 때까지 대기한다. 복제한 패킷은 다른 경로인 V2노드에게 패킷을 전달하고 V2노드는 다시 V3노드에게 전달하는 방식으로 목적지노드까지 반복적으로 패킷을 전달한다[9]. 그러나 I1교차로에서 V8노드를 언제까지 기다려야 할지 시간을 정할 수 없고, 매 교차로마다 같은 상황이 발생될 경우 복제되는 패킷의 양은 늘어나게 되어 다음 노드를 선정하는 시간이 지연되는 문제점을 가지고 있다. 이처럼 기존의 교차로모드에서는 목적지 노드까지 패킷을 전송하는 시간과 속도를 고려하지 않았다.
Ⅱ장에서 살펴본 문제점을 개선하기 위해 비콘 프레임을 이용하여 핸드오프 성능을 향상시키고, 개선된 비콘 프레임을 이용하여 전송속도가 향상된 A-GBSR 프로토콜을 제안한다.
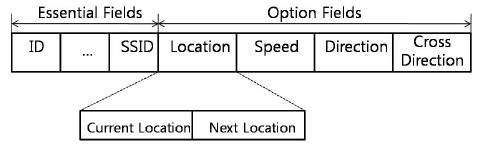
비콘은 이웃노드 리스트를 효율적으로 관리할 수 있도록 자신의 전송반경 내에서 모든 노드들에게 브로드 캐스트하여 정보를 제공한다. 기존의 비콘 알고리즘은 모든 이웃노들의 위치를 안다는 가정 하에 노드의 ID와 현재 위치를 포함하는 비콘을 주기적으로 전송한다. 이러한 방법은 교차로에서 진행 방향 없이 패킷을 전송하기 때문에 도로에서 경로를 이탈하는 문제점이 발생한다. 이에 본 논문에서는 비콘메시지의 현재의 위치뿐만 아니라 속력 및 교차로에서의 진행 방향 정보도 함께 추가하여 전송한다.
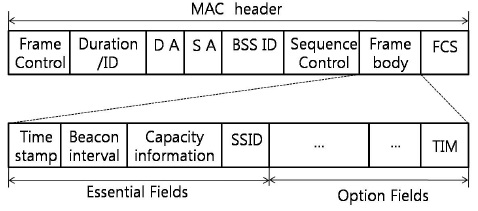
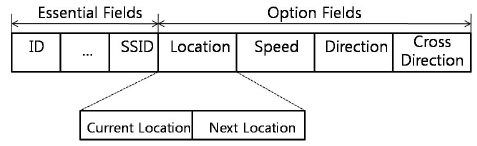
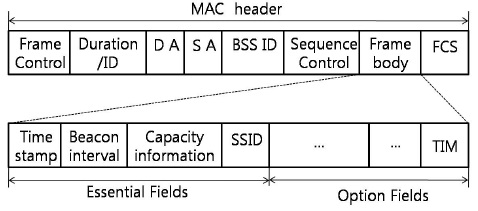
본 논문에서 효과적인 이웃노드를 선정하기 위해 비콘메시지의 형태를 다르게 정의할 뿐만 아니라 개선된 비콘 전송 방법을 제안한다. 제안하는 비콘메시지 형태는 그림 5와 같고, 전송주기는 1 second로 설정한다. 기존 비콘 알고리즘에서 위치, 속력, 방향, 교차로 진행 방향의 정보를 추가하여 전송하고, 현재 노드위치와 다음 노드 위치를 비교하여 속력이 빠른 노드에게 전송하여 목적지까지 최단 시간으로 패킷을 전송한다. 또한 교차로에서 진행 방향을 변경하게 될 경우 기존의 비콘 전송주기를 리셋하여 새로운 전송주기로 비콘메시지를 전송한다. 해당 비콘메시지를 수신한 이웃노드들은 해당 노드의 진향방향 정보를 참조하여 이웃노드 리스트 관리 목록을 갱신한다.
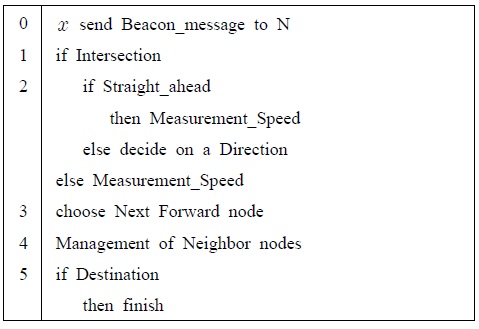
본 논문에서 제안하는 A-GBSR 알고리즘은 표 1과 같다. 비콘메시지를 1 second 단위로 브로드캐스트 할 때마다 차량의 순간속도를 계산하여 속도가 더 빠른 차량에게 패킷을 전송하는 기법이다.
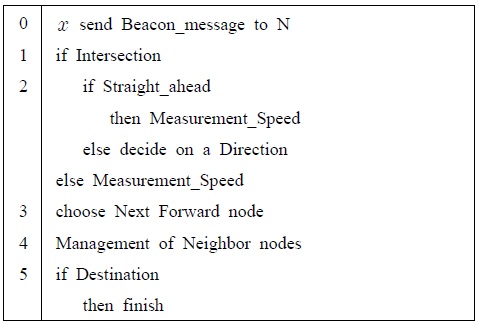
A-GBSR 알고리즘
전송하고자 하는 패킷이 발생하면 비콘메시지를 자신이 전송할 수 있는 범위안의 노드들에게 브로드캐스트하여 이웃노드의 속도와 방향 등의 정보를 수신한다. 그리고 노드가 위치하는 도로가 직선도로인지 교차로 인지 파악하기 위해 현재 노드가 있는 위치를 확인한다. 교차로에서 직진방향이거나 직선도로인 경우에는 목적지까지 이동하고 있는 방향이 동일하므로 전송 반경인 무선 커버리지 내에서 가장 먼 노드 2개를 선정하여 각각 순간속도를 측정하고 비교하여 순간속도가 빠른 노드를 다음 전달노드로 선정한다. 만약, 같은 속도일 경우는 무선 커버리지 경계부위에 가장 가까운 노드에게 패킷을 전달한다. 그리고 교차로에서 직진이 아닌 우회하는 방향 즉, 목적지노드의 방향이 좌측방향 또는 우측방향이면 노드의 속도는 제외하고 방향으로만 다음 전달노드를 선정한다. 이때, 속도를 제외하는 이유는 교차로에서 방향을 바꿀 때 속도를 줄이면서 우회하기 때문에 속도는 의미가 없기 때문이다.
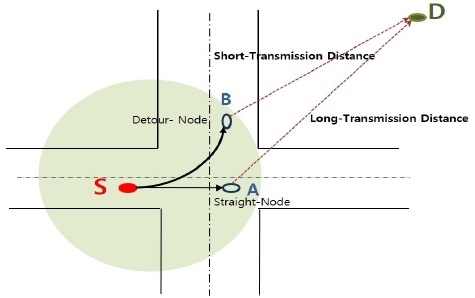
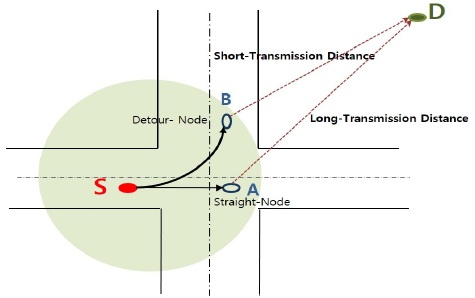
그림 6은 교차로에서 직진노드와 우회노드 중 다음 노드를 선정하는 방법을 나타낸다. 교차로에 직면한 S는 직진노드인 A와 우회노드인 B중에서 다음 전달노드를 찾기 위해 D의 위치를 먼저 파악한다. A노드와 B노드에서 목적지노드인 D까지 각각 전송거리를 측정하여 짧은 전송거리의 노드에게 다음 전달노드로 선정한다. 짧은 전송거리인 B노드에게 패킷을 전달함으로써, 우회노드에게 패킷을 전송하는 방법으로 전송하고 이웃 노드 리스트 관리 목록을 갱신한다.
본 논문에서는 OBU(On Board Unit: 차량용 단말기)가 탑재된 다수의 차량으로 구성하고, 도로는 교차로와 직선도로가 있는 그리드 형태의 도로라는 가정하에 기존 GBSR 프로토콜과 제안하는 A-GBSR 프로토콜을 시뮬레이션하여 비교 및 평가하였다.
시뮬레이션 모델은 5000m * 5000m 크기의 도심 도로환경을 모델링 한다. 소스노드에서 목적지노드까지의 경로는 지도상의 교차로 간 최단 경로를 설정할 수 있도록 알고리즘을 적용하였다. 도로상에는 평균 100 ~ 500개의 이동 노드들이 존재하며, 각 노드들은 20km/h ~ 80km/h의 평균속도를 유지한다. 각 노드들은 1 second 간격을 주기로 자신의 위치 정보 및 진행 방향 정보를 포함하는 비콘메시지를 전송한다.
본 논문에서는 차량의 속도에 따른 패킷 도착시간과 차량 밀도에 따른 패킷 도착시간과 패킷 전송 성공률을 평가 지표로 하고, GBSR 프로토콜과 제안하는 A-GBSR 프로토콜 간의 결과를 비교하였다.
GBSR과 A-GBSR 중 먼저 목적지노드에 도착한 노드를 각각 카운트하여 패킷 도착시간을 구하였고, 패킷 전송 성공률은 소스노드에서 목적지노드까지 도착한 노드의 개수를 카운트하였다. 본 시뮬레이션은 300초씩 총 20회하여 평균을 구한 결과이다.
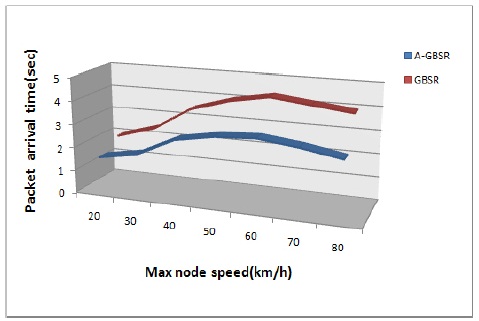
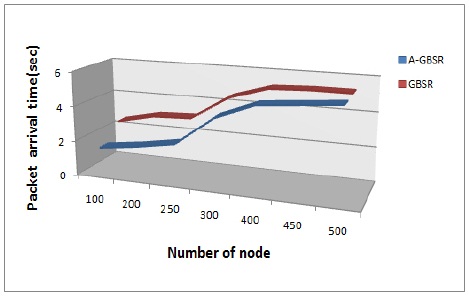
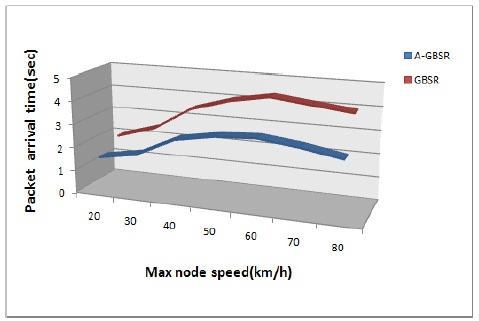
그림 7은 이동하는 노드 수를 100으로 고정하고 속도를 20km/h에서 80km/h 사이의 범위에서 조금씩 변화를 주며 성능을 테스트하여 패킷 도착시간을 구한 결과이다. 그래프와 같이 A-GBSR이 GBSR보다 약 10% ~ 15%정도 향상된 것으로 확인할 수 있다. 차량의 속도가 낮은 경우에는 패킷 도착시간이 크게 차이는 없지만, 점점 속도가 빨라지면서 급격한 차이가 나는 것을 볼 수 있다. 이는 A-GBSR이 순간속도가 빠른 노드에게 패킷을 전송하기 때문에 속도가 빠를수록 더 빠르게 패킷이 목적지까지 도착하고, 낮은 속도에서는 빠른 노드를 찾을 수 없어 GBSR과 비슷한 결과를 보인다.
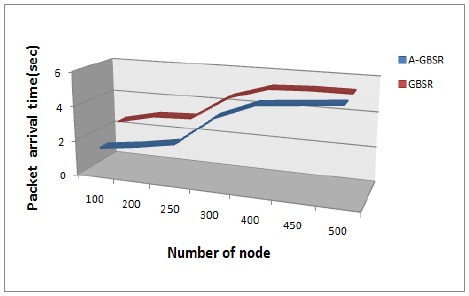
그림 8은 차량의 밀도에 따른 패킷 도착시간을 나타낸 것이다. 차량의 밀도가 100에서 500이 될 때까지 노드의 수가 점점 증가하면 노드들의 속도도 점점 동일하게 낮추면서 테스트한 결과, 차량의 밀도가 낮은 100~200의 경우에는 패킷 전송시간이 평균 10%정도 향상되어 빨라졌음을 확인할 수 있다. 점차 밀도가 증가하면서 450부터는 속도가 점점 떨어지게 되는데, 이는 정체된 노드사이에서 더 빠른 노드를 찾을 수 없으므로 GBSR의 결과와 유사한 결과를 내는 것을 볼 수 있다.
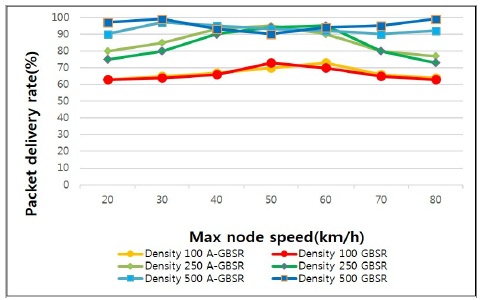
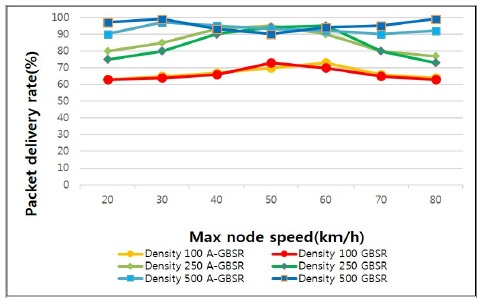
그림 9는 차량의 밀도를 100, 250, 500노드로 고정시킨 후 속도에 변화를 주어 패킷 전송 성공률을 테스트 한 결과이다. 차량의 속도는 20km/h ~ 80km/h 사이에서 바꾸어 가며 테스트하였다. A-GBSR과 GBSR 둘 다 전송 성공률은 비슷한 결과를 보였으며, 밀도가 250노드일 때 A-GBSR에서는 40km/h ~ 50km/h일 때가 전송 성공률이 높아 가장 최적의 환경임을 알 수 있다. 여기서 A-GBSR이 도심 도로환경에서 적합한 프로토콜임을 확인할 수 있다.
밀도가 100일 때 패킷 전송 성공률은 약 60% ~ 70% 정도로, 차량의 밀도가 250일 때 보다 약 15% ~ 20%정도 낮아졌다. 이는 차량의 밀도가 낮을수록 전송 범위내에 이웃노드를 찾지 못해 단절될 수밖에 없기 때문이다. 밀도가 500일때는 패킷 전송 성공률은 90% ~ 100%에 가깝게 나타났다. 이는 속도와 상관없이 노드 수가 많기 때문에 패킷이 단절될 상황이 발생하지 않기 때문이다.
이처럼 A-GBSR과 GBSR간의 패킷 전송 성공률은 속도와 밀도의 변화에 따라 큰 편차는 보이지 않았다. 그러나 노드의 밀도가 250일 때 속도에 따라 패킷 전송 성공률이 약간의 편차가 나타남을 알 수 있다. 속도가 70km/h 이상부터 패킷 전송 성공률이 10% ~ 15%정도 떨어짐을 볼 수 있는데, 이는 A-GBSR과 GBSR 모두 밀도 250에서 노드의 속도가 빨라지면서 네트워크 단절이 발생할 수 있기 때문이다. 그리고 노드의 밀도가 점점 증가할수록 패킷 전송 성공률은 점점 높아짐을 확인할 수 있다.
802.11P WAVE는 도로 위에서 일어날 수 있는 차량간 사고 및 연속 사고 발생 등을 예방하기 위하여 사용되며, 범죄의 알림 및 응급환자 수송 등 긴급한 메시지를 최대한 빠르게 전송하는 것이 필요하다. 이에 본 논문에서는 A-GBSR 프로토콜을 제안하여 이웃노드 리스트 관리를 통한 차량의 속도 및 교차로 진행 방향의 예측으로 패킷의 전송속도 및 전송시간을 고려하여 차량의 속도와 밀도에 변화를 주어 테스트 하였다. 그 결과 A-GBSR이 GBSR보다 차량 속도 테스트에서는 10% ~ 15%정도, 차량 밀도 테스트에서는 10%정도 전송시간을 단축할 수 있었다. 그리고 패킷 전송 성공률에서는 A-GBSR와 GBSR 모두 속도와 밀도의 변화에 따라 큰 편차는 보이지 않고 비슷한 결과를 나타냄을 확인할 수 있었다.
Ⅳ장에서 수행한 시뮬레이션 결과를 통해 도심 환경도로에서 제안하는 A-GBSR 프로토콜이 기존 GBSR 프로토콜에 대비하여 패킷 도착시간이 단축되는 것을 확인할 수 있었다. 그러나 차량의 밀도가 매우 높아지는 경우 속도의 향상이 기댓값 이하임을 시뮬레이션 결과가 보여주고 있었다. 또한 이동 노드의 밀도가 극히 낮아지는 경우 패킷 단절의 가능성이 발생할 수 있을 것으로 판단된다.
향후 연구에서는 교차로에서 다음 노드 선정 시 짧은 전송거리를 선정하더라도 실제 전송의 지리적 거리가 더 멀어지는 특성의 발생 시 해결하는 방법에 대한 연구가 필요하며, 더 나아가 VANET 모듈을 차량에 탑재하여 실제 도심 환경에서 A-GBSR 프로토콜의 성능평가를 수행해야 할 것으로 판단된다.