In recent years, Transport Demand Management has been conducted for the efficient management of transport. In ITS applications in particular, the prerequisite is accurate and reliable positioning. However, the major problems are satellite signal outage, and multipath. This paper proposes that outage and multipath measurement can be detected and estimated using elevation angle and signal to noise ratio data association relation in stand-alone GPS. In order to verify the performance of the proposed method, it is then evaluated by the car test. the evaluation test environment has low accuracy and unreliable positioning because of signal outage or multipath such as steep hill and high buildings. In the evaluation test result, 918times abnormal signal occurred and it was confirmed that the proposed method showed more improved 9.48m(RMS) horizontal positioning error than without proposed method.
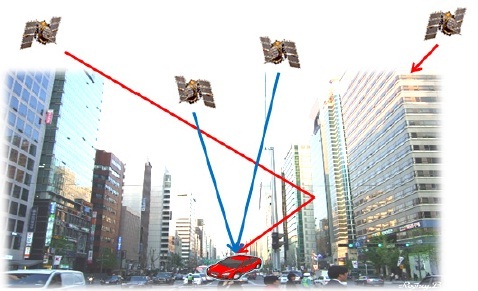
미래의 교통체계를 대비하기 위하여 차량 전자장비의 기술도 급속히 발전하고 있다. 미래 교통체계는 3차원 공간 교통네트워크, 청정교통체계, 그에 따르는 신교통 운영전략 등을 반영한 시스템이다. 특히, 자율주행의 연구는 국내외에서 활발히 이루어지고 있으며 정확하고 믿을 수 있는 위치결정이 지능형 교통시스템의 상용프로그램에 가장 중요한 요구사항이다. 그러나 도심지역에서 위치결정의 가장 큰 문제점은 그림 1과 같이 위성신호의 차단 또는 다중경로 오차이다. 다중경로 오차는 GPS신호가 두 개 이상의 경로를 가지고 수신하는 현상을 이야기 한다. 이는 전파신호가 장애물에 반사되거나 산란되어 수신기에 전달되는 것으로, 고층 건물이 많은 도심환경이나 수면에 의한 신호의반사가 심한 해양환경에서 그 영향이 심하다. 국지적인 환경요인의 영향으로 발생하는 다중경로 오차는 DGPS (Differential GPS)와 같은 차분기법을 사용할 경우, 공통오차로 제거되지 않기 때문에 수신기의 가장 큰 오차요인으로 작용하게 된다. 이러한 이유로 다중경로 오차의 제거가 필요하다[1].
이러한 다중경로 오차의 문제점을 보완하고 위치결정의 신뢰성을 높이기 위한 방법으로 안테나 단에서의 차단기법, 칼만필터 등을 이용한 추정기법, 신호 상관기 설계기법 등이 있다[2,3]. 그러나 안테나 단에서의 차단기법은 낮은 앙각을 가지는 신호 입력을 차단하는 방법이므로, 자세변화가 많은 항체에서는 효용성이 떨어지는 문제가 있다[4]. 신호 상관기 설계기법은 소프트웨어 GPS 수신기에만 사용 가능한 단점이 있다[5,6]. 최근에는 전방향 원적외선 카메라를 이용하는 방법, 지도 정보를 이용하여 다중경로를 예측하고 제거하는 연구가 이뤄지고 있다[7]. 카메라를 이용하는 방법은 위성과 수신기 안테나 사이의 시선각 방향으로 차단되거나 다중경로 오차를 시각적으로 유추하여 검출하는 것으로, 카메라 센서를 추가로 장착해야하는 단점이 있다[8]. 지도를 이용하는 방법은 항체의 주변 건물 3차원 지도와 앙각과 방위각의 지도를 이용하여 위성으로부터의 시선각 방향으로 차단 또는 다중경로 오차의 가능성을 추측하여 검출한다. 그러나 항체가 이동하는 공간의 지도가 필요하므로 많은 데이터가 필요한 단점이 있다[9].
본 논문에서는 도심에서 코드 측정치만을 가지고 위성신호의 차단, 다중경로의 이상신호를 판단하고, 짧은시간 동안의 측정치를 추정하여 보다 정확하고 신뢰성있는 항법을 제안한다.
2장에서는 위성신호의 차단, 다중경로의 이상신호판단 결정과 측정치 추정에 대하여 설명하고 3장에서는 도심에서 차량을 대상으로 제안하는 알고리즘의 성능평가 결과를 보였으며, 4장에서는 결론을 제시하였다.
GPS 코드 측정치는 식 (1)과 같다[10].

여기서,

여기서
코드 측정치를 최소 자승법으로 식 (3)과 같이 위치

식 (1)과 (2)에서는 국지적으로 발생하는 다중경로 오차를 고려하지 않는다. 그러나, 도심지역에서의 다중경로 오차로 인해 코드 측정치가 최대 150m까지 증가하며, 위치 해에 큰 영향을 준다. 그러므로 식 (2)에서는 이러한 다중경로 오차(M)를 추가한 식 (4)를 정의한다.

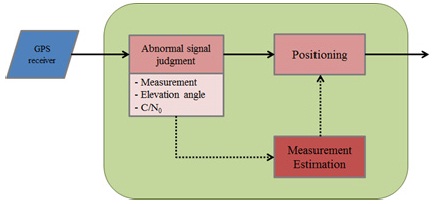
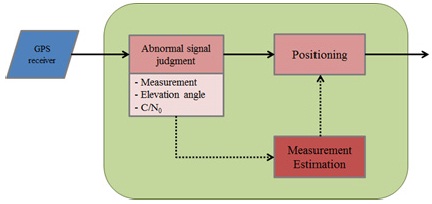
높은 빌딩이 밀집해 있거나, 주변 장애물이 많은 도심지역에서는 위성신호의 차단이나 다중경로 오차가 발생할 가능성이 높으며, 정확성과 신뢰성이 떨어지게 된다. 그림 2는 도심에서의 이상신호를 판단하고 추정하는 알고리즘을 나타낸다. 수신기로 받은 위성신호를 이상신호 판단 기준으로 정상일 경우 위치를 계산하지만, 이상신호로 판단할 경우 측정치를 추정하여 위치를 계산한다. 다중경로 오차 발생의 판단은 위성과 수신기사이의 앙각, 신호잡음비(
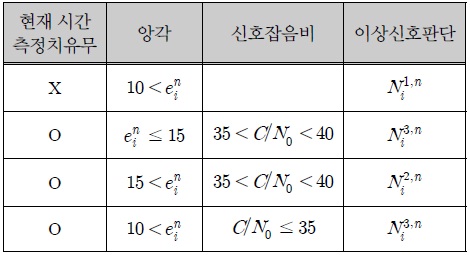
이상신호 판단을 위한 데이터간 연관관계
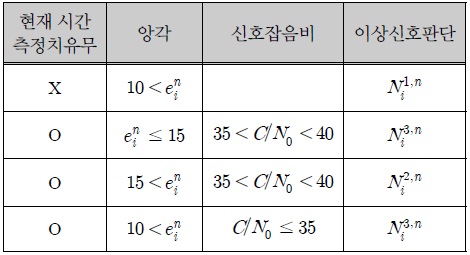
앙각이 5도 일 때 신호잡음비는 대략 35[dB-Hz]이며, 10도에서는 40[dB-Hz], 90도 일 경우, 47[dB-Hz]에 가깝다. 위성은 보통 앙각 10도 부근에서 가시위성에 제외되므로, 앙각이 10도 이상일 경우, 측정치가 들어오지 않았을 때, 차단으로 판단할 수 있고 측정치를 추정한다. 그러나 신호잡음비가 35[dB-Hz]보다 낮다면 다중경로 영향이 크게 나타나며 측정치의 품질이 좋지 않아 추정하는 것이 항법성능을 저하시키기 때문에 측정치를 제거한다. 신호잡음비가 35~40[dB-Hz]사이일 경우는 다중경로 오차의 영향으로 인하여 신호잡음비가 낮아질 수 있다. 앙각이 15도 이하로 낮을 경우에도 이전의 측정치 품질이 좋지 않아 측정치를 추정하지 않고 제거하는 것이 성능을 향상시킨다. 그러나 앙각이 15도 이상으로 높을 경우에는 측정치를 추정하는 것이 항법성능을 향상시킨다.
표 1에서 데이터간의 관계를 통하여 판단한 이상신호는 표 2에서와 같이 측정치를 추정하거나 제거한다. 측정치를 제거하는 것은 낮은 앙각에서의 다중경로오차로 인하여 측정치가 오히려 위치오차를 크게 하는 결과를 나타낸다. 그러므로 이러한 측정치를 제거하는 것이 향상된 위치결과를 얻을 수 있다. 이상신호의 측정치를 추정할 경우 식 (5)와 같이 생성할 수 있다.

여기서
여기서
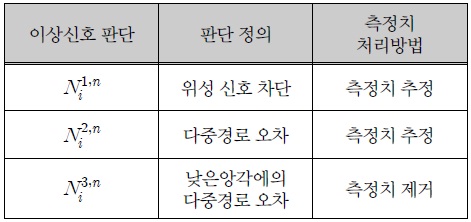
이상신호 판단 정의
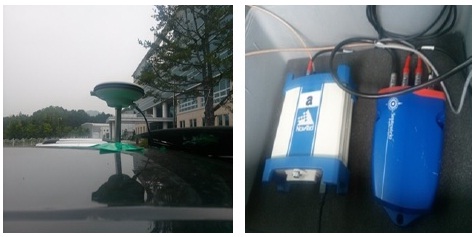
도심에서의 이상신호 판단 및 측정치 추정 알고리즘을 검증하기 위하여 2014년 7월 2일 대전 대덕연구단지 근교에서 실험을 수행하였다. 성능 검증은 NovAtel사의 DL-V3 수신기를 이용하여 수집하였고 알고리즘은 후처리로 수행하였다.
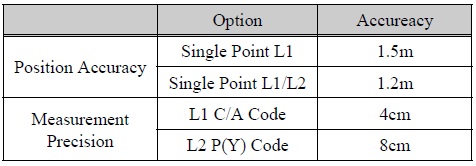
그림 3은 실험 장비를 갖춘 차량모습이다. 실험 장비는 GPS 안테나, 수신기와 PC로, GPS 안테나는 차량 중심에 장착하였으며, 수신기 또한 차량에 장착하였다. 표 3은 차량실험에 사용한 GPS 수신기인 NovAtel사의 DL-V3수신기의 성능을 나타낸 것이다.
[표 3.] NovAtel 사의 DL-V3 수신기 성능
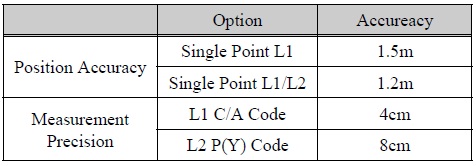
NovAtel 사의 DL-V3 수신기 성능
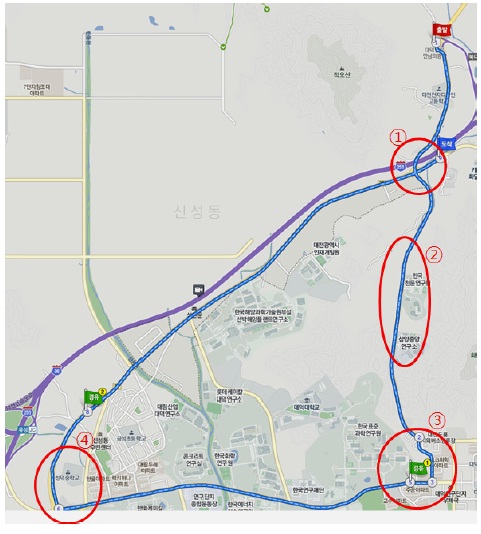
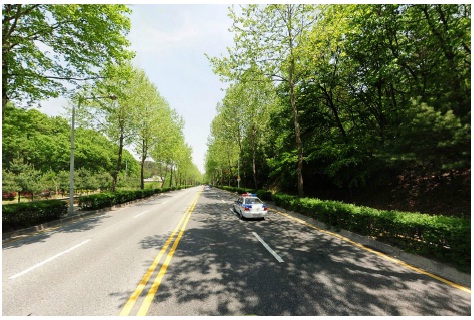
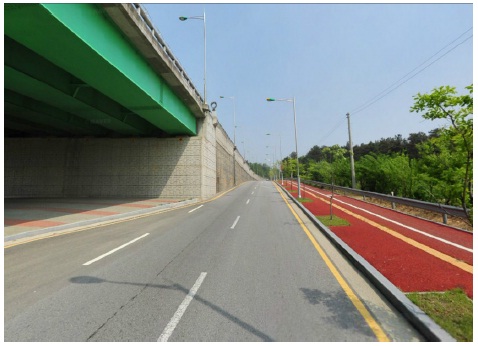
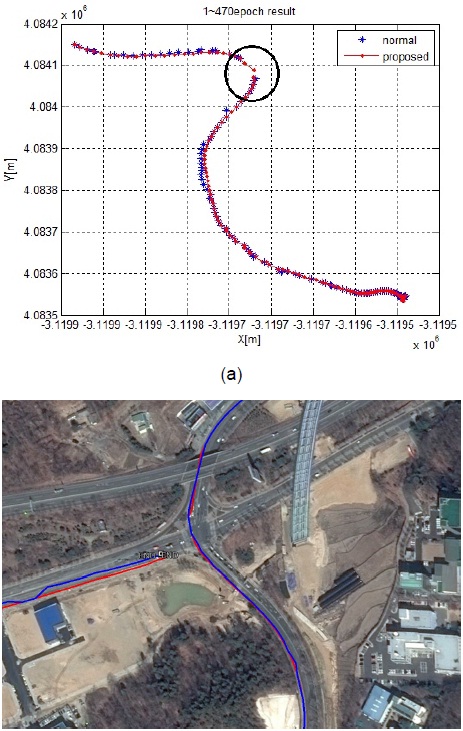
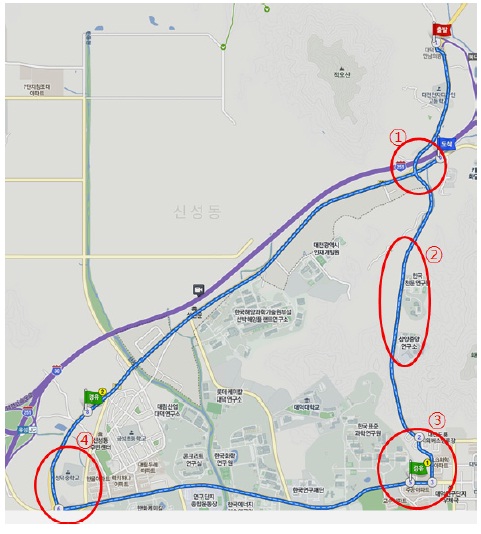
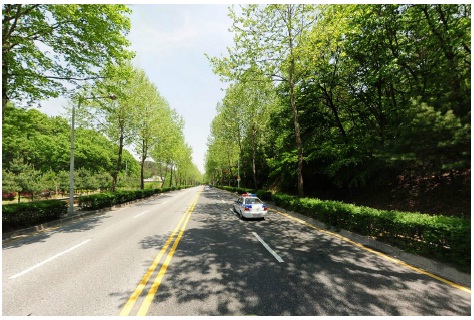
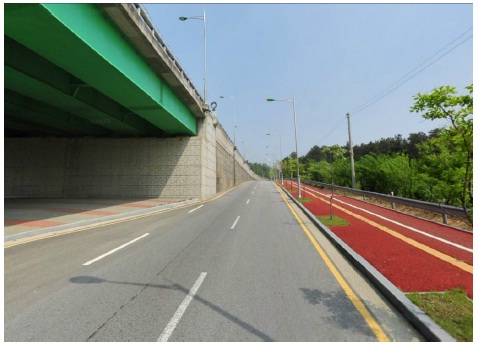
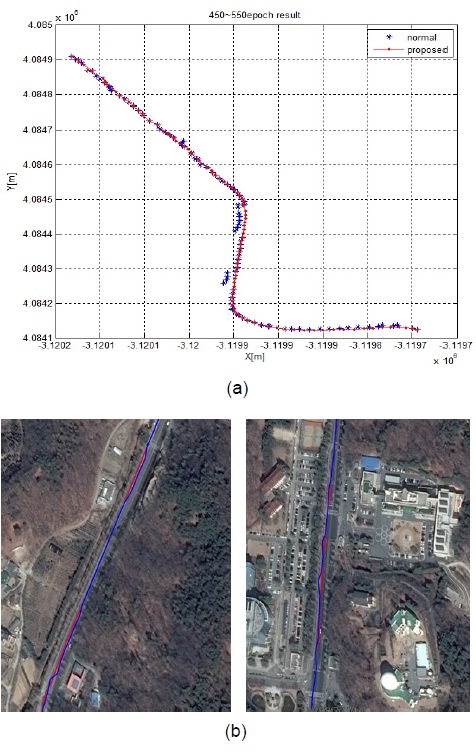
성능 검증을 수행한 대덕연구단지 근교의 실험환경은 표 2에서 정의한 세 가지의 이상신호가 다양한 환경에서 복합적으로 존재하며, 위치 궤적은 그림 4와 같다. 먼저 그림 5와 같이 ①번 구간에서는 육교로 인하여 다중경로 오차와 위성신호 차단이 발생한다. ②번 구간에서는 그림 6번과 같이 가로수로 인한 다중경로 오차가 발생하며, 그림 7번은 ③번 구간에 있는 빌딩으로 인하여 큰 다중경로 오차와 위성신호 차단이 발생한다. 마지막으로 그림 8번과 같이 ④번 구간에서는 육교와 벽으로 인하여 서쪽 방향으로 위성신호가 모두 차단되며 다중경로 오차 또한 발생한다.
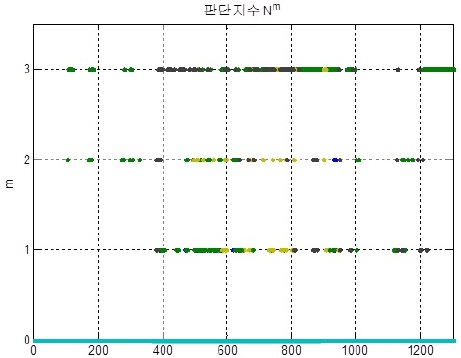
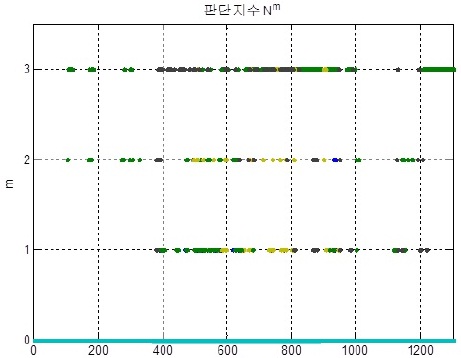
그림 9는 성능 검증 실험의 이상신호 판단 결과이다. 각각
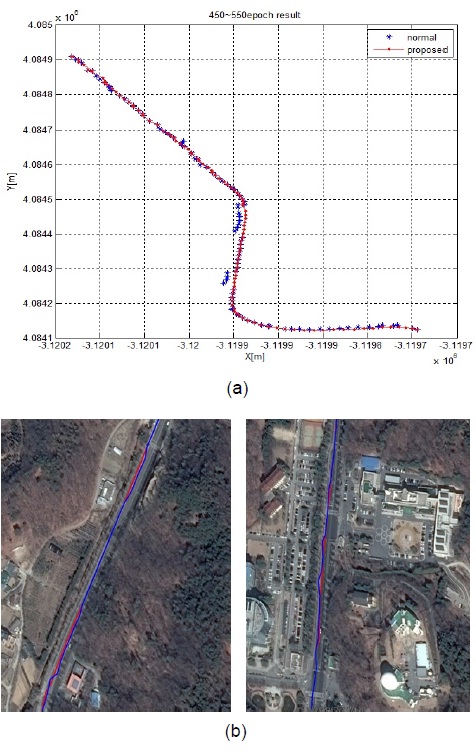
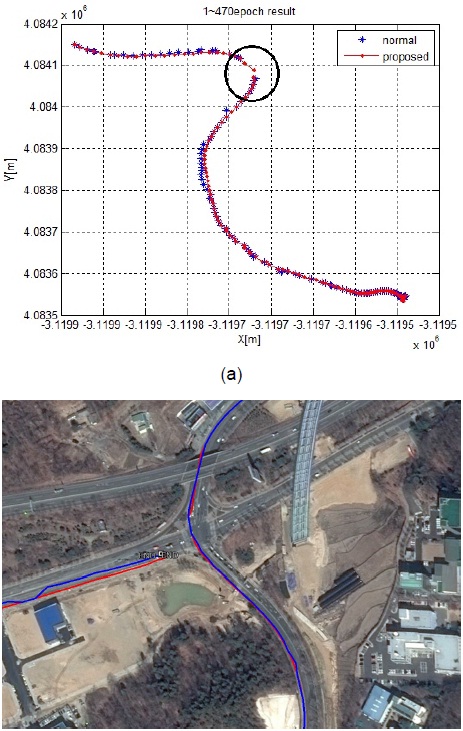
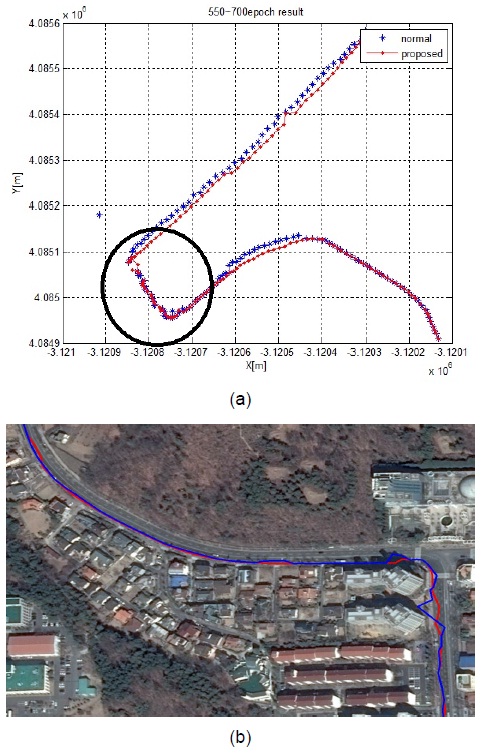
그림 10에서 원은 육교의 위치를 나타내며, 위성신호 단절과 다중경로 오차로 인하여 알고리즘 적용 전에는 위치를 계산할 수 없었지만, 제안한 알고리즘을 적용한 결과 더 오랜시간 연속적인 항법을 할 수 있으며, 더 정확한 위치 결과를 얻을 수 있었다. 그림 11은 ②구간에서의 실험 결과이다. 그러나 제안한 알고리즘을 적용할 경우, 낮은 앙각의 다중경로 오차를 포함한 위성신호는 제거하고, 높은 앙각의 다중경로 오차를 포함한 위성신호를 추정하여 더 정확한 위치 결과를 얻을 수 있었다. 측정치의 개수가 4개이상일 경우에, 다중경로 오차를 포함한 낮은 앙각의 측정치를 사용하는 것보다 사용하지 않는 것이 향상된 위치 결과를 보여준다.
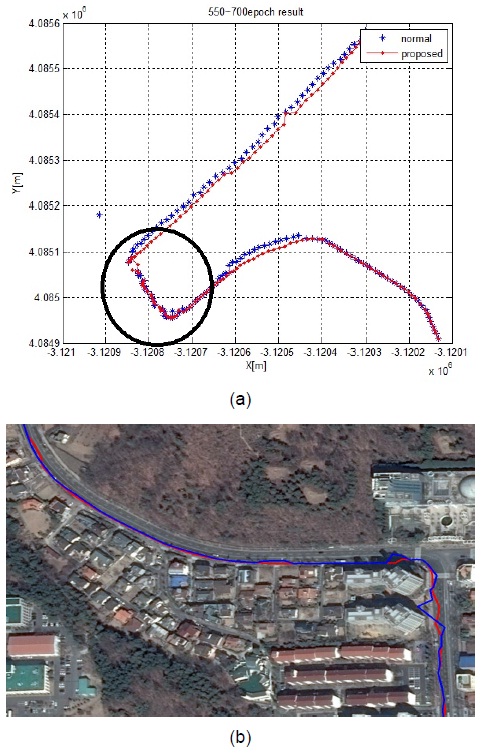
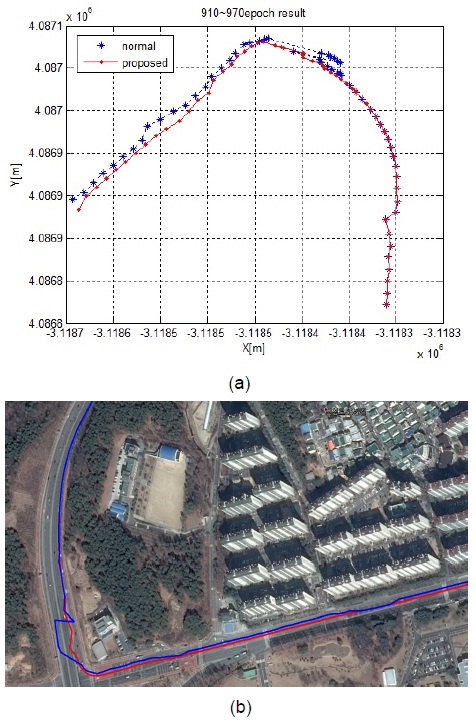
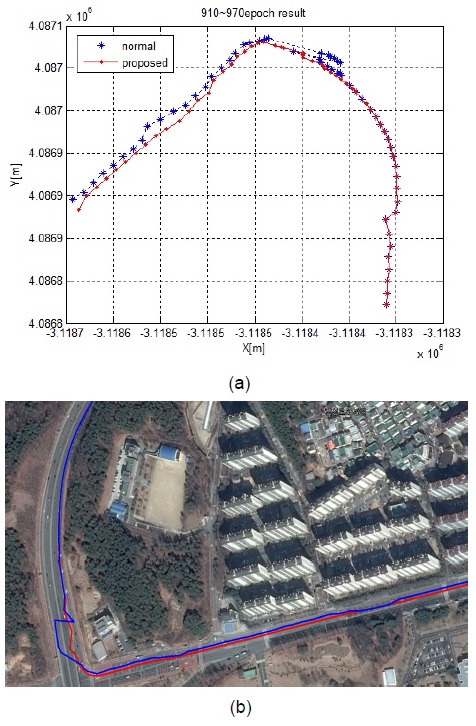
그림 12는 ③구간에서의 실험 결과로 도심의 특성인 높은 빌딩으로 인한 다중경로 오차가 빈번하게 일어나는 곳으로, 특히 원안에는 그림 7번과 같이 도로 양쪽으로 높은 빌딩이 위치해있다. 실험 결과, 알고리즘을 적용하기 이전에는 도로에서 크게 벗어나는 위치가 나타나는 것을 확인 할 수 있다. 그러나 알고리즘을 적용한 후에는 정확하고 신뢰성 있는 위치결과를 보여준다. 그림 13은 ④구간에서의 위치결과를 나타낸 것으로, 육교로 인하여 한쪽 방향으로 위성신호가 단절과 다중경로 오차가 발생하는 환경이다. 제안한 알고리즘을 적용하지 않았을 경우 위치오차가 크게 나는 것을 확인할 수 있었다. 이 구간에서는 신호 단절과 함께 낮은 앙각의 다중경로 오차가 포함되어 큰 오차를 발생하게 된다. 제안한 알고리즘을 적용하였을 경우, 정확도가 향상되었다.
제안한 이상신호 판단을 이용하여 전체 신호구간 중 차량이동구간에서의 위성신호 8540개에서 918개로 11% 가량 이상신호가 발생하였다. 이 때의 위치오차는 작게는 몇 m에서 최대 100m까지 발생하였다. 이는 도심에서의 항법에 큰 영향을 준다. 이를 제거하기 위하여 검출한 이상신호를 제거하거나 또는 측정치를 추정하여 위치를 결정하였다. 제안한 방법을 적용하기 전후를 비교하였을 때, 위치결과의 이상이 19개에서 2개로 약 90%가량 줄어들었으며, 위치오차도 제안한 방법을 적용하였을 경우 수평측위오차가 RMS 9.48m 향상되었다.
본 논문에서는 도심에서 발생하는 이상신호를 검출하고 상황에 맞게 측정치를 추정하는 알고리즘을 제안했다. 이상신호는 위성신호의 단절과 앙각에 따른 다중경로 오차로 분류하였으며, 앙각과 신호잡음비에 따라 측정치의 추정 유무를 결정하는 데이터간의 관계를 정의하였다. 알고리즘의 유효성을 검증하기 위하여 대전대덕연구단지 근교에서 차량실험을 진행하였으며, 이상신호 발생 4구간을 정의하여 적용 후의 결과를 비교하였다. 실험 결과, 높은 빌딩이 위치해있거나, 육교로 인하여 신호 단절과 다중경로 오차가 발생하였을 경우 위치 오차가 커지는 것을 확인하였으며, 이는 항법하기어려울 정도의 오차였다. 제안한 방법을 적용하였을 경우, 위치결과의 이상이 90%가량 줄어들었으며, 수평측위오차가 RMS 9.48m 향상되었다.