에지 검출은 여러 분야에서 다양한 용도로 적용되는 영상 처리 기술 중 하나이고, 대부분의 응용에서 필수적인 전처리 과정으로 사용된다. 기존의 에지 검출 방법들에는 고정 가중치 마스크를 이용한 Sobel, Prewitt, Roberts, LoG등이 있다. 기존의 에지 검출 방법들은 고정된 가중치 마스크를 영상에 적용하기 때문에 다소 에지 검출 특성이 미흡하게 나타난다. 따라서 본 연구에서는 이러한 문제점을 해결하기 위해, 중심 화소를 기준으로 한 십자 마스크와 중심화소의 주변 화소를 중심으로 상, 하, 좌, 우에 마스크를 적용하여 에지를 검출하는 알고리즘을 제안하였다. 그리고 제안한 알고리즘의 성능을 평가하기 위해, 기존의 Sobel, Roberts, Prewitt, LoG 에지 검출 방법들과 비교하였다.
Edge detection is one of image processing techniques applied for a variety of purposes in a number of areas and it is used as a necessary pretreatment process in most applications. In the conventional edge detection methods, there are Sobel, Prewitt, Roberts and LoG, etc using a fixed weights mask. Since conventional edge detection methods apply the images to the fixed weights mask, the edge detection characteristics appear somewhat insufficient. Therefore in this study, an algorithm for detecting the edge is proposed by applying the cross mask based on the center pixel and up, down, left and right mask based on the surrounding pixels of center pixel in order to solve these problems. And in order to assess the performance of proposed algorithm, it was compared with a conventional Sobel, Roberts, Prewitt and LoG edge detection methods.
영상 처리는 군사, 의료, 산업 등의 여러 분야에서 다양하게 활용되고 있다. 영상 처리는 영상 분할, 영상 인식, 특징 추출 등으로 분류되며, 그 중 영상 분할 기술에 속하는 에지 검출은 차선 검출, 문자 인식 등을 위한 필수적인 전처리 기법이며, 의료용 전자기기, 스마트 TV 및 스마트폰, 차량 인식 단말기 등 여러 응용에 적용되고 있다[1-5].
에지는 영상에서 명암 차이가 큰 두 영역간의 경계를 나타내며, 대상 물체에 대한 다양한 정보를 포함하고 있다. 보편적으로 사용되는 에지 검출 방법에는 Sobel, Prewitt, Roberts, Laplcian, LoG 방법 등이 있다[6-8]. 이러한 방법들은 인접화소에 가중치를 적용한 수평, 수직 혹은 대각선 방향의 마스크를 컨볼루션하여 에지를 검출하며, 알고리즘이 간단하고, 빠른 처리 시간의 장점을 갖는 반면, 고정된 마스크를 영상에 적용하기 때문에, 다소 에지 검출 특성이 미흡하다.
따라서 본 연구에서는 우수한 에지 검출 특성을 얻기 위하여, 중심 화소를 기준으로 한 십자 마스크와 중심화소의 주변 화소를 중심으로 상, 하, 좌, 우에 마스크를 적용하여 에지를 검출하는 알고리즘을 제안하였다. 그리고 제안한 알고리즘의 성능을 평가하기 위해,시험영상을 사용하여 기존의 Sobel, Roberts, Prewitt, LoG(Laplacian of Gaussian) 에지 검출 방법들과 제안한 알고리즘을 시뮬레이션한 후 비교하였다.
영상에서 에지는 물체와 배경 사이 및 물체 간의 화소 값이 급격하게 변한 영역에서 주로 발생된다. 이와같은 특성의 에지를 검출하기 위한 기존의 에지 검출방법에는 공간 영역에서 고정된 방향성 기울기 마스크들을 적용하는 방법과 2차 미분 연산자 Laplacian을 이용한 에지 검출 방법 등이 있다[3,6-8].
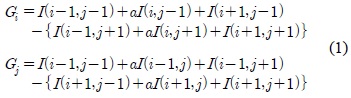
Sobel 및 Prewitt 에지 검출 방법은 공간 영역에서 수평 및 수직 방향의 기울기 마스크를 적용하는 방법이다. 이 방법으로 에지를 얻기 위해서는 먼저
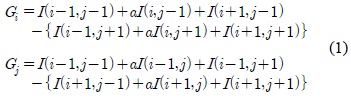
여기서

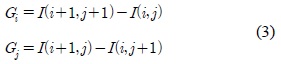
Roberts 에지 검출 방법은 공간 영역에서 고정된 45° 및 135° 대각선 방향의 기울기 마스크를 적용하는 에지 검출 방법이다. Roberts에 사용되는 기울기 가중치 마스크를 영상에 적용한 것은 식 (3)과 같다[2,7].
Roberts 에지 검출 방법에 대한 최종 결과 영상은 식 (2)와 같이 구한다.
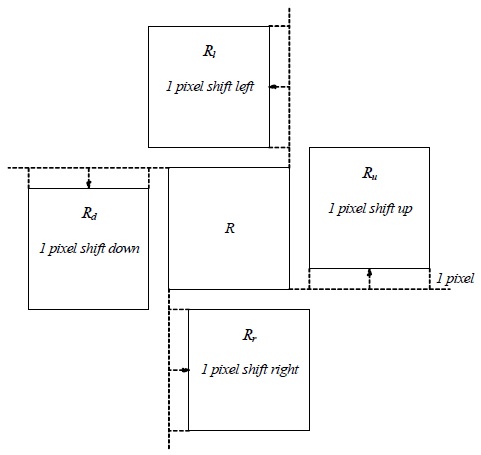
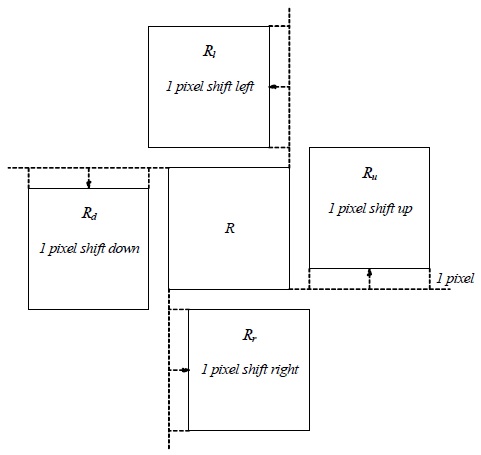
입력 영상으로부터 에지를 검출하기 위한 보편적인 방법으로서 인접 화소의 차를 이용하는 방법이 주로 사용된다. 크기가




식 (4)-(7)은 그림 1로부터 정의되었다.

여기서

위와 같은 방법은 영상을 전체로 이동시키므로 처리 시간이 다소 지연되며, 처리에 있어서 많은 메모리 공간을 요구한다. 따라서 본 연구에서는 이러한 원리를 적용한 마스크 기반 알고리즘을 다음 절에 기술하였다.
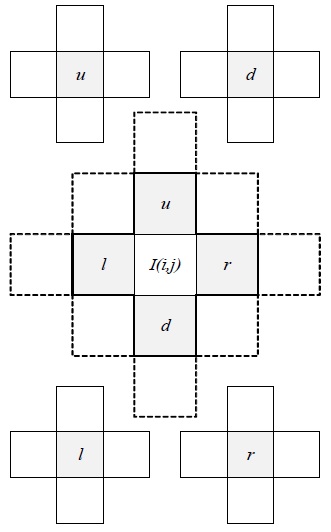
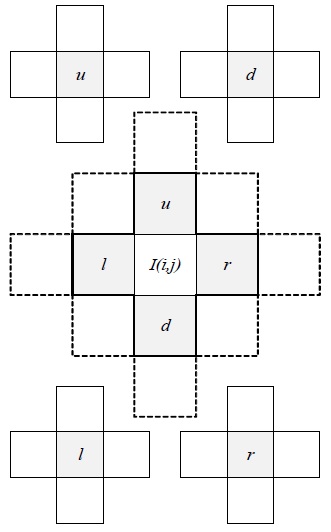
본 논문에서 제안한 알고리즘은 기존의 에지 검출 방법들이 고정된 가중치 마스크를 영상에 적용하는데에 따른 문제점을 보완하기 위해, 3.1절의 에지 검출 원리를 적용하여 원 영상의 화소값들을 마스크화한 후 처리하는 것을 기반으로 한다. 제안한 알고리즘의 기본 원리는 원 영상에서 십자(Cross) 모양의 마스크를 중심화소
그림 2에서 각각의 마스크를 수식으로 표현한 것은 식 (10)-(14)와 같다.





식 (10)-(14)를 적용하여 중심 화소를 기준한 마스크에 대한 편차는 식 (15)와 같이 구한다.

최종 에지는 각 편차들의 합으로 구하며 식 (16)과 같다.

식 (17)을 전개한 것은 식 (17)과 같다.
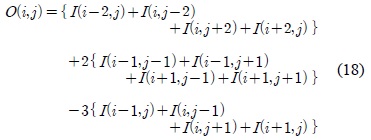
식 (17)로부터 최종 에지 검출 식은 식 (18)과 같이 구한다.
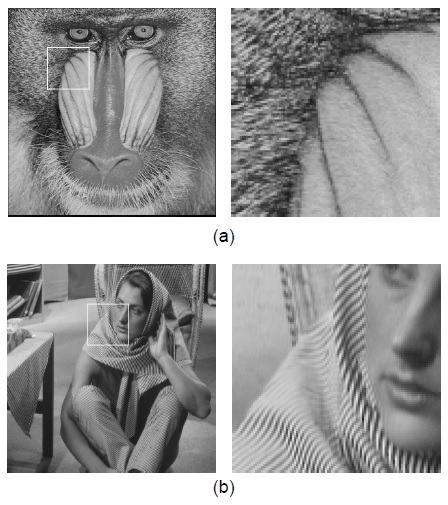
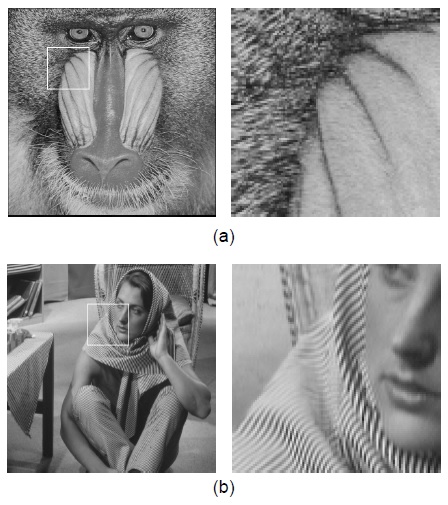
본 논문은 기존의 에지 검출 방법들의 문제점을 보완하기 위해, 중심 화소를 기준으로 한 십자 마스크와 중심 화소의 주변 화소를 중심으로 상, 하, 좌, 우에 마스크를 적용하여 그 편차들을 이용한 에지 검출 알고리즘을 제안하였다. 제안한 알고리즘의 에지 검출 성능을 확인하기 위하여, 기존의 Sobel, Roberts, Prewitt 및 LoG 에지 검출 방법들과 비교하였으며, 시험 영상은 그림 3과 같이 512×512 크기 8비트 그레이 레벨의 Baboon 영상과 Barbara 영상을 사용하였다.
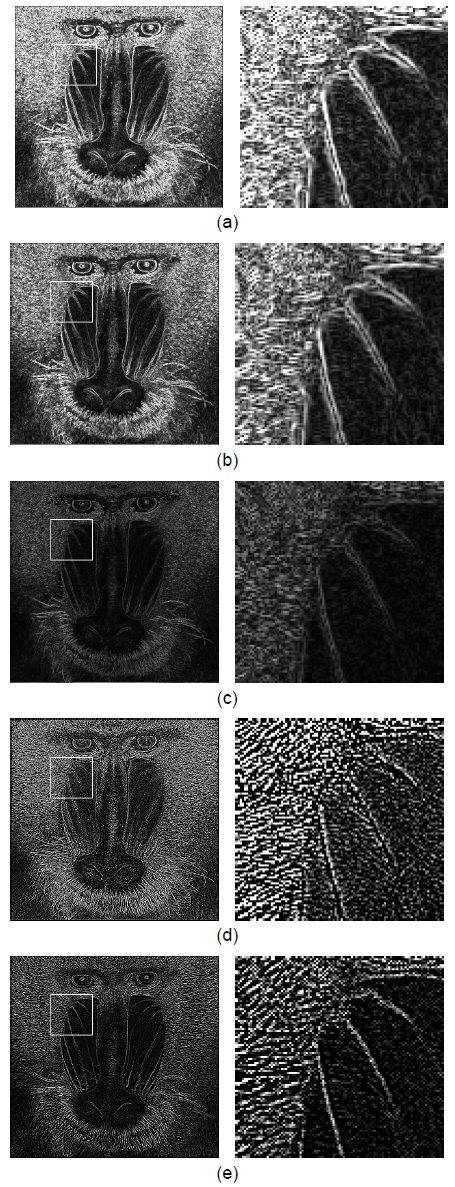
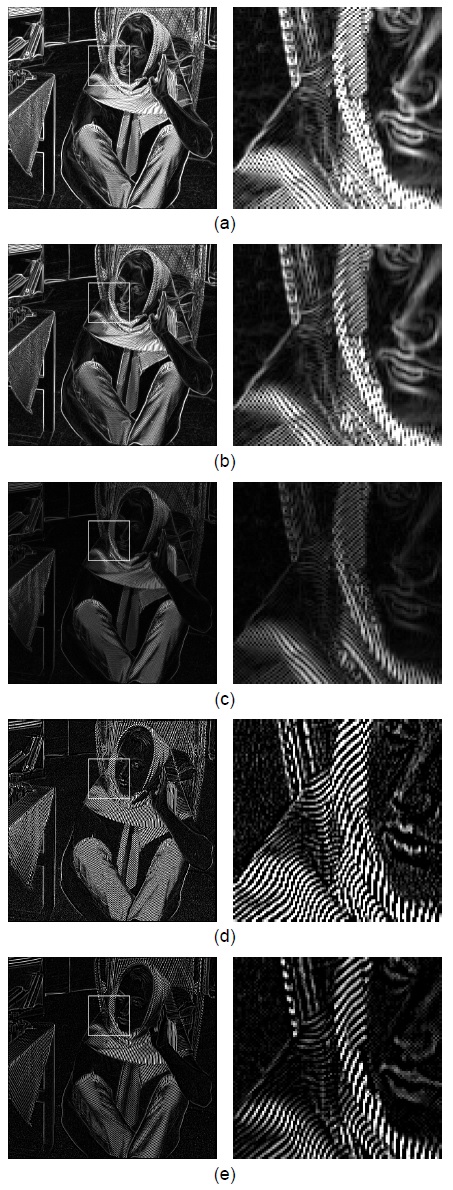
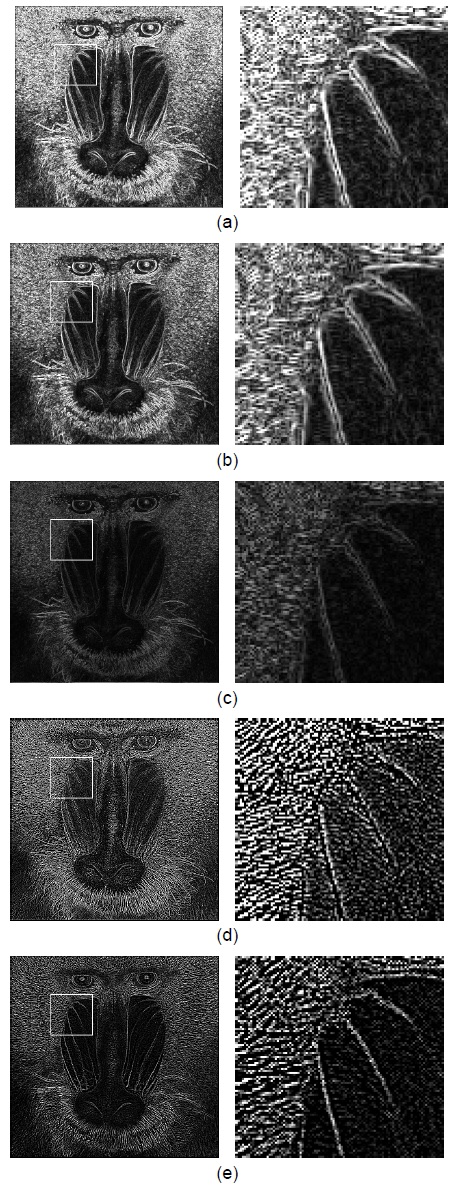
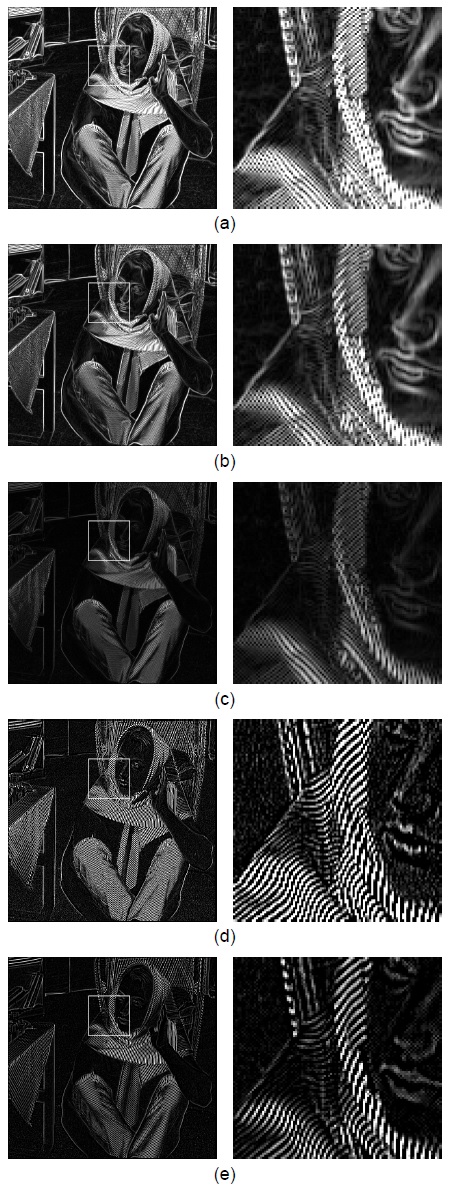
그림 4와 5은 그림 4의 시험 영상들을 사용하여 기존의 방법들과 제안한 에지 검출 알고리즘을 시뮬레이션한 결과들이다.
그림 4와 5에서 (a)는 Sobel, (b)는 Prewitt, (c)는 Roberts, (d)는 LoG 에지 검출 방법으로 처리한 결과 영상이며, (e)는 제안한 에지 검출 알고리즘으로 처리한 결과 영상이다. 각 영상의 좌측 영상은 Baboon과 Barbara의 전체 영상이며, 우측 영상은 결과를 좀 더 시각적으로 나타내기 위하여 Baboon(150,150), Barbara(150, 250) 좌표를 기준으로 101 × 101 크기의 영역을 추출하고 확대한 영상을 나타낸다.
그 결과, Sobel 에지 검출 방법으로 처리한 결과 영상에서, 전반적으로 크기가 강한 성분의 에지를 검출하는 결과를 나타내었지만 하나의 에지를 이중선으로 검출하는 결과로 다소 오류를 나타내었다. Prewitt 에지 검출방법으로 처리한 결과 영상에서, Sobel 방법의 에지 검출 결과에 비해 약하게 에지를 나타내어, 고주파 영역에서 다소 검출 특성이 우수하였지만, Sobel 방법과 동일하게 하나의 에지를 이중으로 검출하는 결과로 검출 오류를 나타내었다.
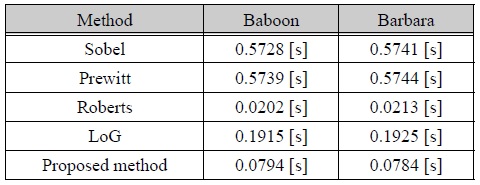
Roberts 에지 검출 방법으로 처리한 결과 영상에서, 전반적으로 크기 성분이 낮은 결과를 나타내므로, 영상 전체적인 에지 검출 결과가 다소 미흡함을 나타내었다. LoG 에지 검출 방법으로 처리한 결과 영상에서, 하나의 에지를 이중으로 검출하는 에지 검출 오류를 나타내었으며, 불필요한 영역의 에지를 검출하여 영상에 다소 잡음 성분을 나타내었다. 그리고 제안한 에지 검출 방법으로 처리한 결과 영상에서, 고주파 영역에서의 에지검출 특성이 우수하였고, 저주파 영역의 에지를 비교적 정확하게 검출하여 영상 전체적으로 우수한 에지 검출특성을 나타내었다. 그리고 각 알고리즘들의 처리 속도를 비교하기 위하여, Intel Core i5-4570 3.2GHz CPU, 8.0GB RAM이 탑재된 64비트 Windows 8 운영체제에서 MATLAB 버전 2012a를 이용하여 성능을 시험하였으며, 그 결과는 표 1과 같다.
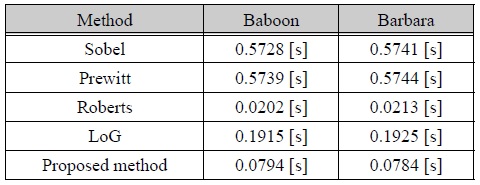
각 알고리즘 별 처리 속도
표 1에서 Sobel 및 Prewitt 에지 검출 방법은 약 0.57초이며, Roberts 에지 검출 방법은 약 0.02이다. 그리고 제안한 알고리즘은 0.07초로 비교적 빠른 처리 시간을 나타내었다. 이에 따라 제안한 알고리즘은 비교적 빠른 속도로 우수한 에지 검출 결과를 나타내었다.
본 논문은 기존의 에지 검출 방법들의 문제점을 보완하기 위해, 중심 화소를 기준으로 한 십자 마스크와 중심 화소의 주변 화소를 중심으로 상, 하, 좌, 우에 마스크를 적용한 후, 그 편차들을 이용하여 에지를 검출하는 알고리즘을 제안하였다. 시뮬레이션 결과, Sobel 및 Prewitt 에지 검출 방법은 우수한 크기 특성을 갖는 에지를 검출하였지만 하나의 에지를 이중으로 검출하는 오류를 나타내었고, Roberts 에지 검출 방법은 에지 검출 특성이 다소 미흡하였으며, LoG 에지 검출 방법은 비교적 우수한 에지 검출 결과를 나타내었지만, 불필요한 에지 영역의 에지를 검출하여 영상에 다소 잡음 성분을 나타내었다. 그리고 제안한 알고리즘은 처리 결과 영상에서 기존의 방법들에 비하여 우수한 에지 검출 특성을 나타내었다. 그리고 제안한 알고리즘의 처리 속도는 기존의 에지 검출 방법들과 유사한 속도를 나타내었다. 따라서, 제안한 알고리즘은 여러 에지 검출 응용 분야인 물체 검출, 차선 인식, 문자 인식 등에서 유용하게 활용되리라 사료된다.