In this paper, by utilizing the iBeacon is BLE (BlueTooth Low Energy) protocol devices that are supported by over the Bluetooth 4.0, and have implemented a system to improve the accuracy in the system for measuring the position of the user. After measuring through the system according to the state of the iBeacon, the interference factors are analyzed through analysis of the collected data, and applying the extended Kalman filter for calibration. Compared with the data after applying a filter with existing data, it was confirmed an increase in accuracy. Improvement techniques for providing the less complexity to the actual implementation, is effective in improving the accuracy of vulnerable services basic iBeacon.
ICT(Information and Communication Technology) 기술이 급속하게 발달 및 활용되고 있음에 따라, 다양한 서비스 및 시스템의 융합이 빠르게 진행되고 있다. 개인이 소지하고 있는 기기의 성능 향상과 위치 분석기술 발달의 접목을 통해 GPS(Global Positioning System) 및 Wi-Fi(Wireless Fidelity)를 통한 ICT 기술이 실생활에 적용되었다. 특히 국내외 기업들이 IT 기술을 통해 실내 공간 대상의 하는 위치서비스를 제공하였다[1].
이러한 기술에는 GPS, WLAN(Wireless local Area Network), UWB(Ultra WideBand), 블루투스 기술이 있다. GPS는 실외 환경에서 광역의 전역 좌표계 기반 위치정보를 제공하지만 실내 및 도심 밀집지역에서 위치정보 제공이 불가능하므로 이를 보완하기 위한 광역 실내 위치인식 기술 연구가 활발히 진행되고 있다[2,3].
WPS(Wi-Fi Positioning System)의 경우 WLAN 기반측위 기술로, 각지에 설치된 Wi-Fi 공유기를 활용하여 단말기 위치를 추정하는 방식으로 오차범위는 약 5m라고 알려져 있다. UWB는 임펄스를 이용하기 때문에 대역폭이 확산되어 많은 대역폭을 차지하게 되므로 기존에 사용하고 있는 다른 무선 통신시스템에 장애를 일으킬 수 있다[4]. 하지만 AP간의 장애물 간섭이 없는 위치의 거리 측정은 비교적 정확한 거리가 산출되나, 장애물이 많아지고 거리가 멀어짐에 따라 오차범위가 증가한다.
최근 사용되는 기술로 BLE(Bluetooth Low Energy) 기반인 비콘이 있다. BLE 비콘은 기존 블루투스 프로토콜에 비해 스마트 모바일 기기의 배터리 소모가 적은 것이 최대 특징으로, 이용자가 별도의 행동을 취하지 않더라도 자동으로 이용자의 위치를 파악해 관련 서비스를 제공할 수 있다. 또한, 근접 정보를 이용하는 방식으로 RSS(Received Signal Strength)를 사용하여 사용자의 위치를 결정 한다. 이러한 BLE 비콘은 향후 IPS의 위치 측위를 위한 가장 주목받는 기술이지만, 현재의 기술 스펙으로는 단일기술로써 정확한 위치 서비스를 제공하기 힘든 실정이다[5].
본 논문에서는 위치 추정 능력을 개선하기 위해 iBeacon을 활용하여 측정 대상 지역별 사용자와 거리를 측정하는 시스템을 구현한다. 수집된 데이터 분석을 통해 간섭 요인을 분석하고 보정 방안을 제시한다.
위치 측위기술 동향을 알아보고, 거리측정 방식에 따른 차이점을 알아본다. 대상 지역을 선정하고 분석 및 통신하고 삼변측량 알고리즘과 비교하기 위해 확장 칼만 필터를 설계한다.
설계한 모델의 비콘을 이용한 시스템에서 스마트 모바일 기기가 서버로 측정 데이터를 전송하고, 전송된 정보를 데이터베이스에 저장하도록 구현한다.
UWB와 Wi-Fi, USN 방식 위치 추적 시스템에 대해 연구를 진행하고 비교하였다. UWB와 USN 방식은 위치 추적을 위해 클라이언트에게 장비를 장착시킨다거나, 각 노드별 비용부담이 큰 UWB 장비를 장착해야 한다는 단점이 있다. 최근 블루투스가 기본 지원되는 스마트 모바일 기기의 높은 사용률을 고려하면 저렴한 BLE 기반의 비콘 노드를 설치하여 위치 측정에 활용하여 정확한 위치 추적 서비스를 제공하는 방식이 효율적이라 판단했다. 이를 위한 연구로서 선행되지 않은 BLE 비콘의 위치 측정 방식 개선을 위해 타 통신 시스템의 신호 분석 방식을 연구하였다.
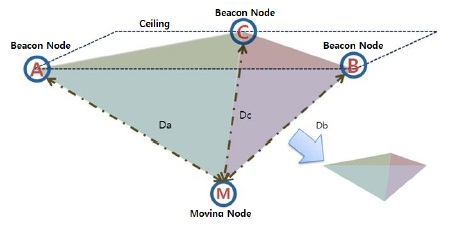
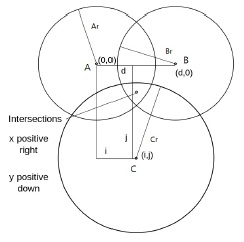
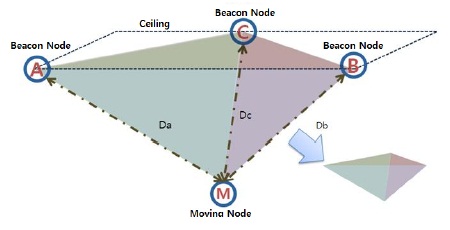
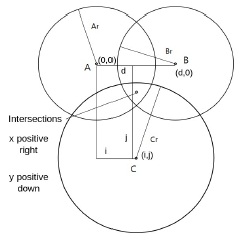
그림 1에서는 실험 장소 내 노드 A,B,C가 천장에 배치되어 있고, 인식 되어야 하는 이동 노드가 바닥에 있다면, 천장에 배치된 노드들과 이동 노드의 거리는 각각 Da, Db, Dc 가 된다. 비컨 노드와 이동 노드를 평면배치 하는 경우 3개의 원이 어느 한점으로 정확히 교차하지는 않는다. 따라서 3개의 원이 모두 겹치는 영역내에서 정확한 위치 판별 방안이 필요하다[6].
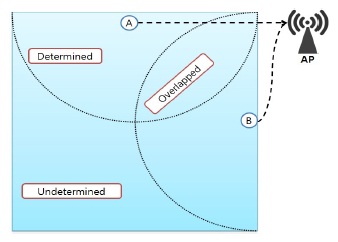
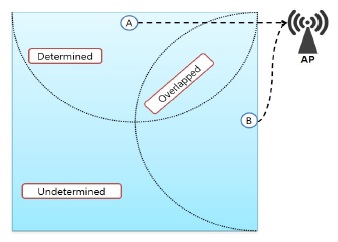
사용자 주변 기점을 활용하여 상대적인 위치 추정을 위해 기점 역할의 위치에 AP(Access Point)를 설치하고 AP로부터 수신된 신호를 통해 사용자의 위치를 추정하는 기점기반 위치 추정 모델을 그림 2로 나타내었다. Wi-Fi 모듈만을 이용하여 사용자의 상대적인 위치 추정이 가능하기 때문에 절대좌표계에서 절대 위치를 추정하는 기존 방식보다 유연한 인프라 구축이 가능하고, 사전 공간 정보가 필요 없는 장점을 가진다. 해당 모델을 이용하면 실내 박물관이나 전시관 같은 물체 기반 LBS(Location Based Service)를 위한 용도로 활용 가능하다.
기점 기반 위치 추정 알고리즘은 상대적 위치 추정을 위한 임계값과 신호차를 이용하여, 영역의 범위를 구분한다. 여기서 임계값은 변화가 나타나기 시작하는 지점의 값이며, 신호차는 기준값과의 차이 계산값으로 차이가 크면 다른 영역과의 구분이 확실해지고, 작으면 불명확해진다[7].
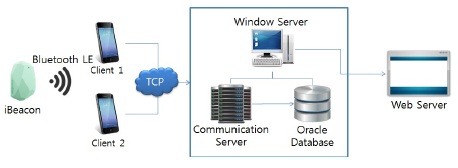
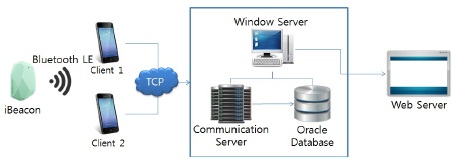
iBeacon을 이용한 실내 위치 신호 측정 시스템 모델을 그림 3으로 나타내었다. 각 클라이언트는 비콘의 데이터를 수신한다. 데이터는 TCP 통신을 이용하여 실시간 전송한다. 이때 실시간성을 요하는 데이터들이 전송되기 때문에 시간정보와 함께 통신서버 데이터베이스에 데이터를 전송한다. 데이터베이스는 Oracle 11g를 사용하였다. 서버는 지속적으로 쌓이는 데이터를 효율적으로 제공하기 위해 웹 서버를 운영하며, 쿼리를 통해 각 데이터를 불러올 수 있다. 또한, 어떠한 모바일 기기가 연결되어도 사용자의 위치 파악이 가능하도록 ID데이터도 함께 전송한다. 그래서 서버에 접근 권한이 있는 사용자라면 현재 관리하고 있는 비콘의 영역 즉, 관리중인 실내 공간 내에 이동하는 모든 클라이언트의 정보를 모니터링 할 수 있다.
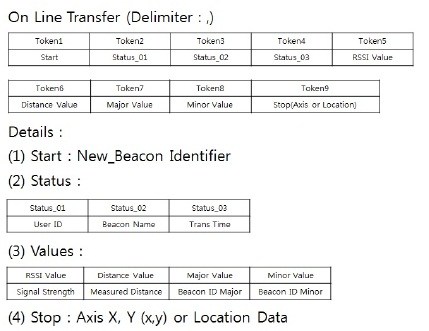
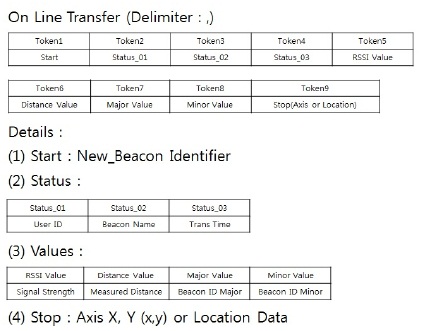
효율적인 데이터 관리를 위해 스마트 모바일 기기와 서버 간 데이터 통신 프로토콜을 설계한다. 통신 프로토콜을 그림 4와 같이 명세하여 접속 IP주소와 전송문장, 구분자의 정보, 각 토큰별 데이터의 정의를 나타내고 있다. 전송되는 데이터의 형태와 토큰의 값 정의를 알 수 있다. On Line Transfer는 전송 문장 내의 토큰들을 의미한다. Status_01은 User ID를 의미하며, 동시 다발적으로 수신되는 사용자의 비콘 데이터를 사용자별로 구분하는데 사용된다. Status_02는 비콘 이름을 의미하는데, 비콘 자체에 저장되어 있는 식별자이다. Status_03은 Trans Time으로 클라이언트가 해당 비콘을 지난 시간을 서버로 전송하는데 사용된다.
스마트 모바일 기기로부터 전송받은 데이터를 통한 삼변 측량을 위해 삼변측량 알고리즘을 적용하였다. 삼변 측량은 삼각 측량과 마찬가지로 삼각형 기하학을 사용하여 물체의 상대 위치를 구하는 방법이다. 하나의 변의 길이와, 양 끝의 두각을 이용하는 삼각측량과는 달리 삼변 측량은 그림 5과 같이 목표의 위치를 알기 위해서 두 개 이상의 기준점에 대한 각 물체의 거리를 이용한다. 삼변측량만으로 2차원 면에서의 상대위치를 결정하기 위해 최소 3개의 기준점이 필요하다[8].
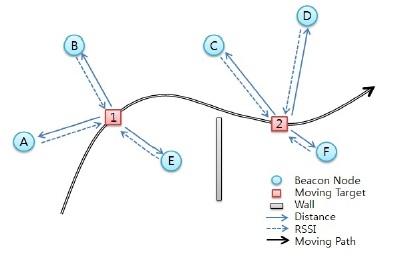
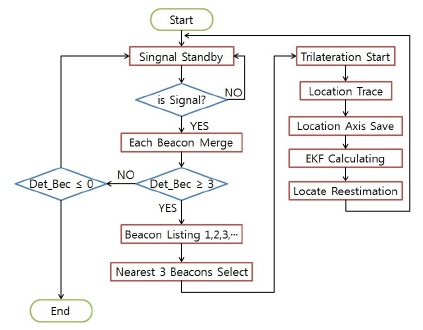
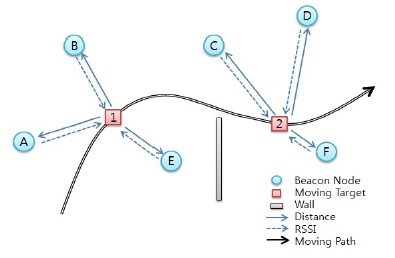
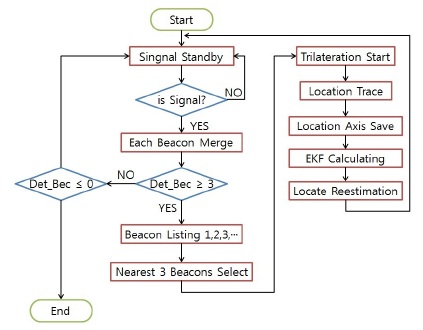
위치 측정을 위한 비콘의 선정을 위한 알고리즘을 그림 6와 같이 나타내었다. 그림 6의 타겟 1과 타겟 2의 주변에서 수신 신호의 세기를 기준으로한 수치인 RSSI(Received Signal Strength Indication)를 활용하여 거리가 가장 가까운 비콘을 파악하였다. RSSI 기반 위치 측정에서 가장 중요한 것은 신호의 세기와 거리이기 때문에 가장 좋은 환경을 위한 선정 알고리즘이 필요한 것이다. 이동 경로 상 위치를 가장 효율적으로 계산 하는 알고리즘을 설계하였다.
타겟 1은 A, B, C, E 노드가 가장 가까운 노드들이다. 하지만 타겟 C는 거리도 멀고 RSSI값도 약하기 때문에 A, B, E 노드만을 선택하여 측위 알고리즘에 대입해야 한다. 또한 타겟 2의 상황으로 보면 C, D, E, F 노드가 가장 가까운 노드들로 보이지만, E 노드와 타겟 2의 사이에 존재하는 벽 방해물 때문에 RSSI 값이 약하게 나온다. 따라서 C, D, F 노드를 통하여 측위 알고리즘에 대입한다. 시스템 구성을 위해 비콘을 배치하고 노드 선정을 위한 알고리즘의 적용을 통하여 노드 선택 방안에 대한 이론이 정립되고 체계화됨에 따라 측위 알고리즘 결과의 효율성에 큰 영향을 미칠 수 있다.
3.4. iBeacon 환경의 확장칼만필터 알고리즘 설계
네비게이션, GPS의 측위에서 주로 사용되는 확장 칼만 필터 알고리즘은 기존 칼만 필터의 선형성 가정을 완화시켜, 더 일반적인 시스템에 사용 가능하도록 확장된 필터이다. 이전 시간 추정 상태에 대해 새로 들어오는 정보를 토대로 다음 예상 상태를 계산하는 방식을 따른다. 이는 예측 단계라고 부르며, 앞서 계산된 예측 상태와 실제로 측정된 상태를 계산하여 현재 위치를 예측하는 보정 단계를 거친다.
예측 방정식으로 예측된 상태 계산을 하고, 예측 이 끝나면 정확한 결과를 위해 갱신 과정을 거친다. 새로운 정보의 가중치에 따라 공분산을 계산하여 현재 갱신중인 정보에 포함시켜 지속적인 추정을 해나간다. 최적 칼만 이득을 도출한 이후 측정값을 갱신한다. 지속적인 갱신 과정을 거쳐 위치를 추정해 나간다. 위 과정을 그림 7로 나타냈다.
이 장에서는 iBeacon을 이용한 측정 신호 분석 및 비교를 위한 시스템을 구현한다. 테스트 기기는 iPhone 5S, Estimote iBeacon을 이용하였다. 비콘의 데이터가 스마트 모바일 기기에 전송되면 TCP 통신을 통해 서버로 실시간 전송되도록 프로그래밍 되어 있다. 통신 프로토콜 설계대로 해당 데이터를 구분자로 분해하여 저장하였다.
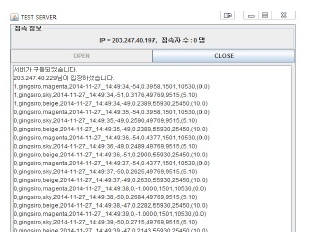
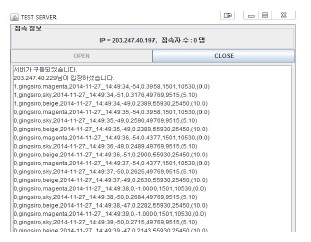
데이터 수신의 시각적 확인을 위해 그림 8과 같이 간단한 서버를 제작하였다. 그림 8에 보이는 수신된 데이터를 데이터베이스에 저장하고 웹서버를 관리하는 역할까지 동시에 수행하고 있는 테스트 서버 메인이다. 간단히 실험에 필요한 요소기능만을 갖추고 있기 때문에 테스트 활용도를 극대화 하도록 작성한 프로그램이다.
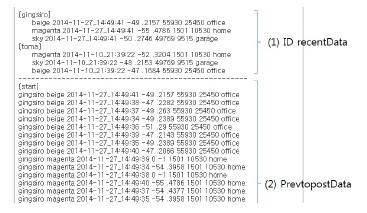
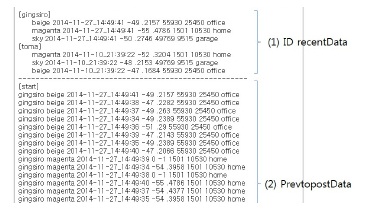
웹서버에 접속하여 작성된 쿼리 결과를 그림 9로 나타내었다. 그림 9의 구역(1)은 접속 클라이언트 ID 별탐지된 비콘의 최근 정보를 나타낸 부분이고 구역(2)는 탐지된 비콘의 정보를 나타내는 부분이다.
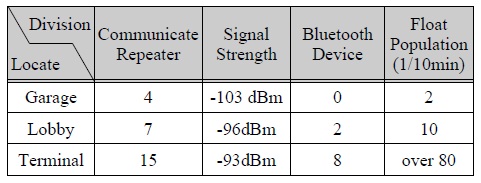
테스트 대상 지역 선정 과정에서 중요한 선정 요인으로 통신 방해요소를 잡았다. 표 1은 대상 지역별 통신방해요소를 표로 나타낸 것이다. 해당 지역들은 통신방해요소 증가에 따른 신호의 위치 추정 성능 평가를 위해 선정되었으며, 통신 방해 요소가 거의 없는 지하주차장과 적절한 방해 요소가 있는 호텔 로비를 선정하였다. 가장 심한 방해 요소가 존재하는 지역으로는 유동인구 요소와 통신 중계기, 블루투스 장비가 가장 많을 것으로 예상되는 터미널로 선정 하였다.
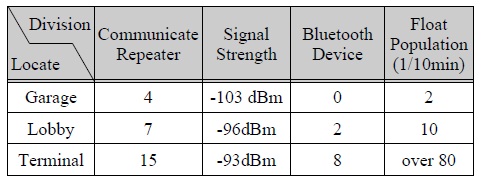
지역별 환경 변수 목록
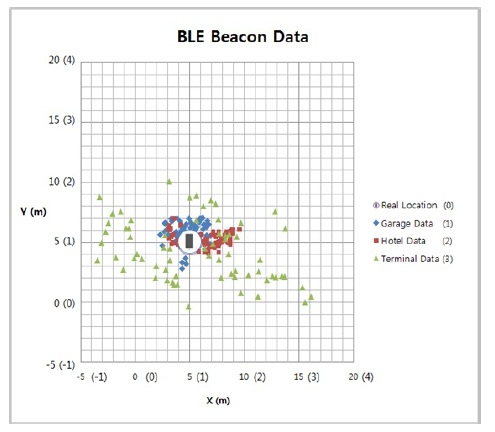
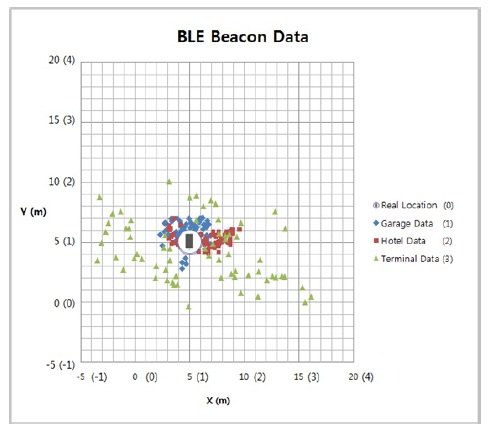
삼변측량은 스마트 모바일 기기와 비콘 간의 거리를 측정한 결과를 이용하여 사용자의 위치를 알아내는 역할을 한다. 따라서 수집된 데이터를 분석할 때는 측정 위치의 실제 좌표와 수집된 데이터는 그림 10처럼 좌표 그래프를 통해 비교할 수 있다.
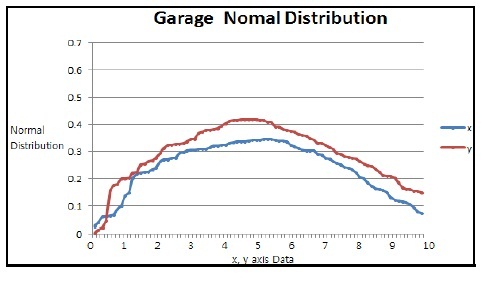
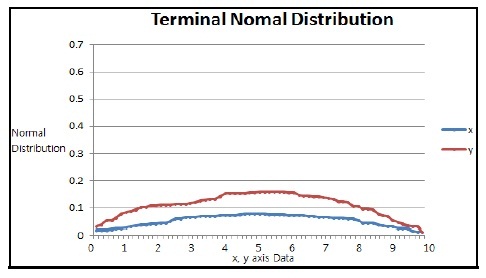
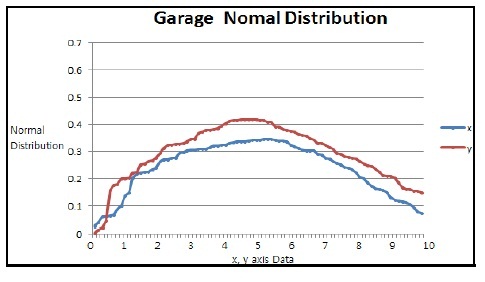
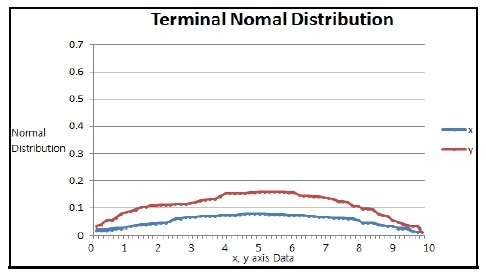
각 데이터를 좌표별 정규분포 그래프로 그림 11, 그림 12로 나타냈다. 파란 선과 빨간 선은 각각 x축과 y축의 정규분포를 나타내고 있다. 위치 추정 결과는 x와 y값이 최대한 근접한 오차를 보이며 정규분포치가 높은 것이 좋은 결과를 보이는 그래프라고 볼 수 있다. 지하주차장 그래프가 비교적 고르게 나타난 데이터를 확인 할 수 있으나, 터미널 그래프는 정규분포치도 높지 않을 뿐더러 직선에 가깝도록 데이터가 분포되어 있는 모습을 볼 수 있다. 사람이 많고 간섭 요인이 많은 방향으로 갈 때 데이터가 훨씬 부정확한 결과를 확인할 수 있다.
이 결과로 볼 때 iBeacon의 활용도를 극대화하기 위해선 통신의 간섭이 비교적 적은 곳에 서비스를 적용하여야 한다는 것을 알 수 있다. 또한 데이터의 평균값은 추적 대상 노드의 위치에 근접하기에 확장 칼만 필터를 적용하여 추정 위치를 산출 할 수 있다. 가장 정확한 지하주차장과 부정확한 터미널을 비교하면 결과 차이가 크다는 것을 알 수 있다.
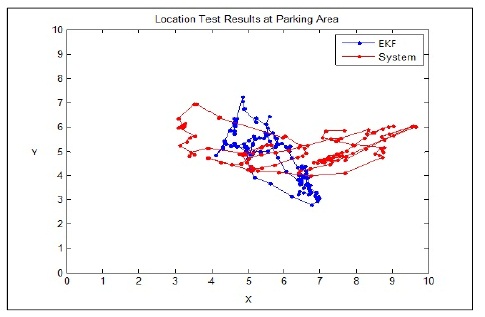
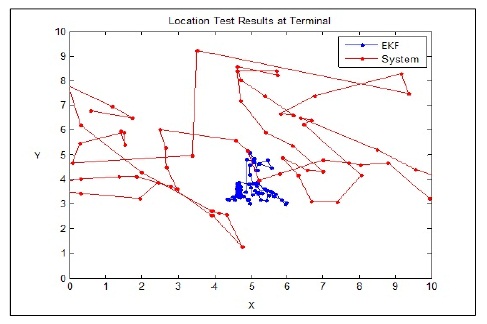
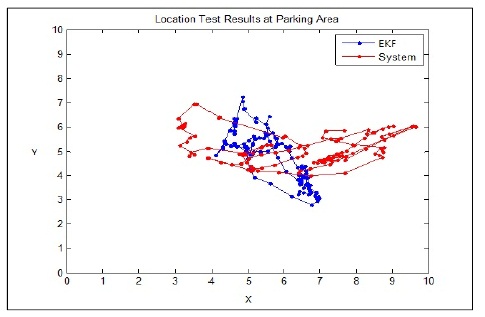
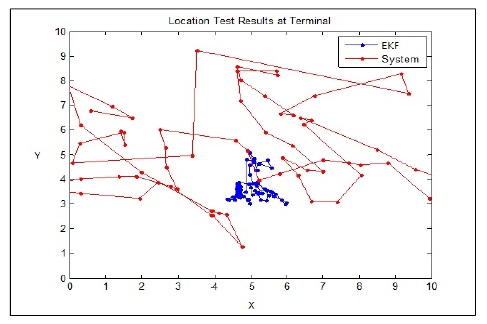
기본 신호의 특성이 신호의 간섭이 많은 곳에서 정확도가 현저히 떨어지는 결과를 보였다면, 다양한 환경에 비콘 서비스를 적용하기 어려울 수 있다. 따라서 칼만필터를 적용하여 기존 삼변측량을 통해 산출된 데이터와 비교를 통해 위치 추정 능력을 그림 13, 그림 14로 나타내었다. EKF(Extended Kalman Filter)는 기존 칼만필터와는 다르게 비선형성 데이터의 위치 추정에 강점을 보이는 필터이다. 따라서 본 논문에서는 EKF를 적용하였다. 그 결과를 나타낸 그래프로 그림 13과 그림 14는 (5.5)로 수렴하는 결과를 보이고 있다.
따라서 삼변측량만을 적용한 결과보다 확장 칼만 필터를 적용하면 서비스를 운영하기에 충분한 성능을 보이고 있어, 기존 Wi-Fi나 UWB 서비스 이후 나온 BLE를 활용한 서비스로의 대체가 가능함을 보였다.
본 논문에서는 스마트 모바일 기기에 장착된 센서와 모듈을 활용하여 사용자의 위치를 추적하고, 데이터를 저장하여 다양한 알고리즘을 적용하고 서비스화 하기 위하여 최근 이슈가 되고 있는 iBeacon을 활용한 실내 위치 추적 시스템의 기본 환경에서 다양한 지역별 간섭에 의한 데이터의 분석과 비교를 위한 시스템을 구현하였다.
실시간 데이터에 삼변측량을 통해 계산된 위치와 확장 칼만 필터를 적용한 결과와 비교하여, 기존 데이터는 부정확하고 넓은 분포를 보인 반면 칼만 필터를 적용한 결과 개선됨을 보이는 것을 확인할 수 있었다.
여러 기업과 단체가 iBeacon 서비스에 대해 불만족하고 있는 부분이 바로 위치의 정확도 문제이다. 이러한 문제를 해결하기 위해 iBeacon 환경에 정확한 측위가 가능하도록 확장 칼만 필터를 적용하였다. 실제 서비스 적용이 가능하도록 신호 분석, 비교를 위한 시스템을 구현을 통해 향상된 신뢰성에 대한 연구를 진행하였다. 결과적으로 스마트 모바일 기기 환경과 융합도가 강하고 비용 면에서 이점이 있는 BLE 비콘을 활용하면 다양한 실내 위치 서비스를 제공하는데 강점을 보일 수 있음을 확인하였다.
그러나 현재 시스템에서 확장 칼만 필터를 통한 정확한 위치 인식을 위해서는 기존 삼변 측량 법을 적용한 위치 인식의 좌표를 수집한 다음 이를 칼만 필터에 적용하는 두 과정을 거쳐야 한다. 기본적으로 선형성을 가지는 확장 칼만 필터를 BLE 비콘에 적용하기 위한 최적화 작업이 필요하다. 이를 위해BLE 비콘 환경의 신호 특성 분석과 함께 이동 객체의 속도에 따른 위치인식 개선에 대한 연구를 추가로 실시하여 확장 칼만필터를 iBeacon에 알맞은 형태로 최적화하는 작업이 필요하다.