A wind velocity is measured in a weather radar as well as the strength of return echoes from rain clouds. These wind velocities are obtained through estimation of Doppler frequencies in return signals. This kind of Doppler frequency estimation method is called as a correlation method. It is widely used in most weather radars because of less computation time. However, it may cause serious errors if a spectrum is not symmetric. Therefore, in this paper, it is shown that the improved method using 3rd order phase estimation model yields the more accurate estimation of the average Doppler frequency using various simulated weather data.
전자파를 이용한 레이다 시스템은 주로 군수용으로 개발되어 왔으나 최근에 와서는 민수용으로 매우 다양한 응용분야에서의 활용 및 연구가 진행되고 있다[1-3]. 기상 레이다는 비구름 등에 의한 전자파의 반사강도를 측정하여 강우정도를 예측할 수 있을 뿐만 아니라 해당 영역별 풍속을 측정함으로서 돌풍 및 태풍의 탐지, 추적 등의 목적으로 다양하게 활용되고 있다[4-6].
기상 레이다에서는 전자파 반사 신호의 도플러 스펙트럼에서의 평균 도플러 주파수를 추출하여 풍속 정보를 추출하고 있는데 악천후 및 돌풍 등에 의한 풍속의 급격한 변화 및 차이 정도를 탐지하여야 하므로 레이다 탐지 영역에서의 정확한 풍속정보 추출이 매우 중요하다. 일반적으로 기상 레이다에서는 탐지 영역이 상대적으로 매우 넓고 악천후에 의한 태풍 및 돌풍 예보 등 실시간 탐지 및 추적이 가능해야 하므로 계산 양이 적은 자기상관(autocorrelation) 함수를 추정하여 평균 도플러 주파수, 즉 풍속정보를 추출하게 된다[7, 8]. 그러나 자기상관 추정에 의한 평균 도플러 주파수 추출은 레이다 수신신호의 도플러 스펙트럼이 대칭형 가우시안으로 나타나야한다는 가정을 포함하고 있다. 하지만 수신되는 기상신호의 약 25% 정도는 비대칭형 가우시안 스펙트럼으로 나타나며 이러한 경우 도플러 주파수 추정에 심각한 오차가 발생할 수 있다[9].
그러므로 본 논문에서는 위상 추정치를 3차로 모델링하여 이러한 오차를 줄일 수 있는 방법을 제안하였다. 제안된 방법은 두 개의 자기상관 추정을 이용하여 더 정확한 평균 도플러 주파수 추정이 가능함을 보였다.
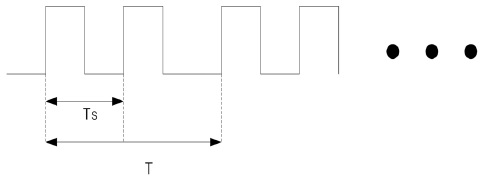
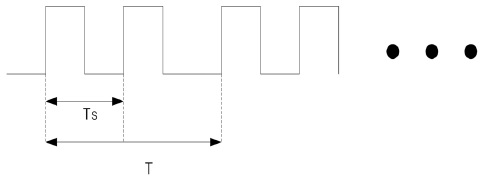
자기상관 추정 방법은 그림 1과 같이 일정한 시간 간격의 두 개의 펄스 신호들을 연속적으로 송출하여 수신되는 복소 신호의 자기상관 함수를 다음과 같이 추정한다.

식 (1)에서의 M 은 펄스 페어의 개수를 나타내므로 일반적으로 M이 클수록 더 정확한 자기상관 함수를 추정할 수 있을 것이다. 일반적으로 자주 사용되는 펄스열(pulse train)의 경우 T 와 Ts 는 같다. 즉 연속적인 펄스 파형의 신호가 송출되어 수신되는 경우이기 때문이다. 따라서 이러한 자기상관 함수 추정치를 이용하여 수신 신호 스펙트럼의 평균 도플러 주파수를 다음과 같이 추출하게 된다[7, 8].

식 (2)로부터 알 수 있는 것처럼 수신신호의 도플러 스펙트럼이 가우시안 또는 대칭형으로 나타나는 경우 추정된 도플러 주파수는 주어진 영역, 즉 셀 내에서의 비교적 정확한 평균 도플러 주파수를 나타내게 된다. 따라서 FFT등 전체 스펙트럼을 추정하여 도플러 주파수를 구하는 방식에 비해서 훨씬 효율적임을 알 수 있다. 그런데 이러한 도플러 주파수 추정 방법은 그 정확성이 유지되기 위해서는 수신 기상신호의 가우시안 도플러 스펙트럼이 대칭형이거나 또는 그 폭이 매우 좁게 나타난다는 가정이 성립하여야 한다.
펄스 페어 방법에서는 지연시각 Ts 에서의 자기상관함수를 추정함으로서 도플러 주파수를 추출하게 되는 데 이것은 수신 도플러 스펙트럼의 첫 번째 모멘트를 계산한다는 의미와 동일하다. 이러한 방법에서의 편이 오차를 분석하기위하여 지연시각 Ts 에서의 자기상관함수 R(Ts) 를 평균 도플러 주파수 fd 를 가지는 기상 도플러 스펙트럼을 이용하여 표시하여 보면 다음과 같이 쓸 수 있다.

식 (3)에서 S0(f)는 평균 도플러 주파수가 0인 기상 신호의 도플러 스펙트럼을 나타낸다. 그러므로 도플러 주파수 추정에 문제가 발생하지 않기 위해서는 식(3) 에서의 적분 값의 허수 성분이 0에 가까워 무시해도 좋을 정도로 나타나야 한다. 즉 S0(f) 가 대칭형 가우시안으로 표현되거나 또는 스펙트럼 폭이 매우 좁게 나타나는 경우 일 것이라는 가정이 만족되어져야 한다.
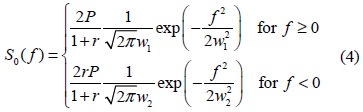
이러한 가정이 성립하지 않으면 오차가 발생하게 된다. 오차를 다음과 같은 비대칭형 가우시안 스펙트럼 모델을 이용하여 나타내어 보자.
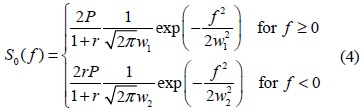
식 (4)의 스펙트럼 모델은 첨두치 도플러 주파수가 0이며 전체 도플러 스펙트럼 전력을 P 로 나타낸 비대칭형 모델이다. 여기서 w1 과 w2 는 비대칭 스펙트럼에서 의 각각의 폭을 나타내며 r=w2/w1 은 가우시안 스펙트럼의 비대칭성 정도를 나타내는 파라미터이다.
이제 이러한 일반적인 비대칭성 모델을 이용하여 평균 도플러 주파수 추정에서의 편향오차에 대하여 고려하여 보자. 식(3)으로부터 알 수 있는 것처럼 적분결과값의 허수부분은 위상의 변화를 야기함으로서 평균 도플러 주파수 추정에 오차를 발생시키게 된다. 식(4)와 같이 표시되는 비대칭 도플러 스펙트럼의 평균 주파수 추정은 다음과 같이 표시되는 추정된 자기상관 함수의 실수부 Re 값과 허수부 값 Im에 의해 표시되는 위상을 이용하여 이루어지게 된다.
따라서 평균 도플러 주파수는 다음과 같이 얻어질 수 있다. 즉,

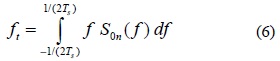
또한 비대칭형 가우시안 모델에서의 실제 평균 도플러 주파수 참값 ft 는 다음과 같이 표현될 수 있다.
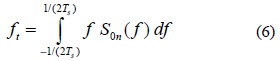
식 (6)에서의 S0n은 식 (4)의 모델을 전체 전력 P로 나누어 전체 전력을 1로 정규화 시킨 모델이다. 그러므로 평균 도플러 주파수 참값은 지연시각 Ts 가 일반적으로 도플러 수신신호의 대역폭을 감당할 수 있을 정도로 작게 선택될 수 있기 때문에 식 (6)은 근사적으로 다음과 같이 표현될 수 있다.

즉, 식 (3)에서 표현된 Ts 에 대한 선형 위상 함수 2πfdTs 는 대칭형 도플러 스펙트럼이 아닌 경우에는 만족될 수 없으며 실제로는 선형모델로 근사화한 도플러 주파수 추정방법이라고 할 수 있다.
따라서 이러한 문제점을 해결하기 위하여 선형 위상모델을 다음과 같이 Ts 에 대한 2차이상의 고차 항을 포함한 일반적인 비선형 n차 다항식으로 나타내었다.

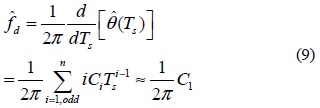
자기상관 함수 R(Ts)는 도플러 전력 스펙트럼의 역푸리어 변환으로 표시되므로 식 (8)에서의 위상 추정 함수는 기함수로 표시되어야 함에 유의하여야 한다. 즉, n의 값은 1, 3, 5⋯등 홀수의 정수 값으로 표시될 수 있다. 이제 식 (8)과 같은 위상 추정치를 사용하면 다음과 같이 평균 주파수를 추정할 수 있다.
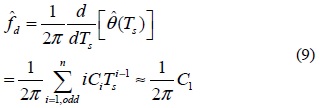
식 (9)식에서 볼 수 있는 것처럼 지연시각 Ts 는 일반적으로 펄스 레이다에서의 샘플링 간격에 해당되므로 일반적으로 10-4~10-5 초 정도의 값을 갖는 매우 작은 숫자이다. 따라서 근사적으로 C1 값만으로도 추정가능하다.
그런데 이와 같이 제안된 개선된 방법을 적용하기 위해서는 우선 자기상관 함수 추정에 의한 위상추정 함수, 즉 n차 다항식의 계수들을 구하여야 한다. 따라서 Ts , 2Ts ⋯nTs 등에 대한 자기상관 함수 추정 즉 위상추정이 이루어져야 한다. 따라서 n번의 자기상관 함수 추정이 이루어져야 한다. 그러나 실제적으로 위상의 비선형성은 3차 함수만으로도 거의 정확한 모델링이 가능하다. 따라서 2번의 자기상관 함수 추정만으로도 충분한 정확도를 유지할 수 있을 것이다. 따라서 본 논문에서는 비선형 위상의 3차 모델만으로도 즉 두 번의 자기상관 함수 추정만으로도 평균 도플러 주파수 추정에서의 오차를 크게 개선시킬 수 있음을 보이고자 한다. 다음 장에서는 다양한 환경에서의 비대칭 모의구현 도플러 스펙트럼들을 이용하여 주파수 추정에서의 발생 오차들을 기존의 방법과 비교, 분석하였다.
기존 방법과의 성능 비교 및 분석을 위하여 우선 다양한 비대칭 가우시안 도플러 스펙트럼 신호를 모의 구현하여야 한다. 여기서는 기상 레이다의 사용 주파수는 C band 인 6GHz 로 설정하였으며 일반적인 관측 자료값들을 감안하여 비대칭성 정도를 나타내는 r값은 0.25~0.5, 또는 2~4 정도로 선정하였다. 시선방향의 최대 풍속이 40m/sec 보다 높게 나타나는 경우는 거의 없다. 따라서 최대 도플러 주파수는 1.6 kHz 가 된다. 그러므로 샘플링 주파수는 신호의 겹침을(aliasing) 방지하기 위하여 최소 샘플링 주파수(Nyquist frequency) 를 약간 초과하는 4KHz 로 설정하였다.
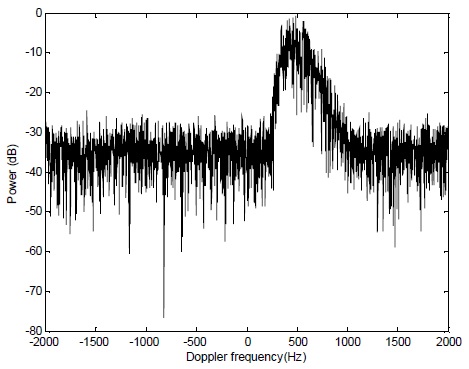
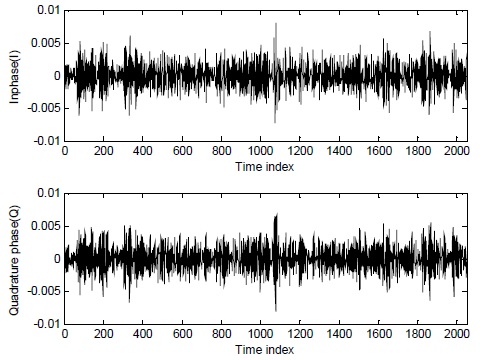
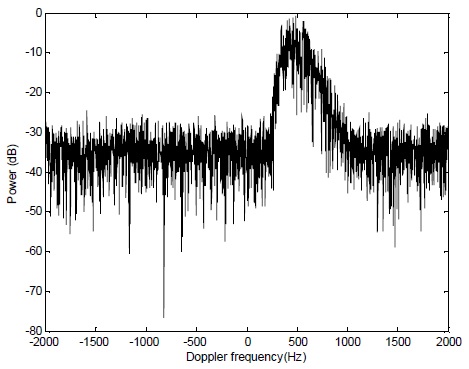
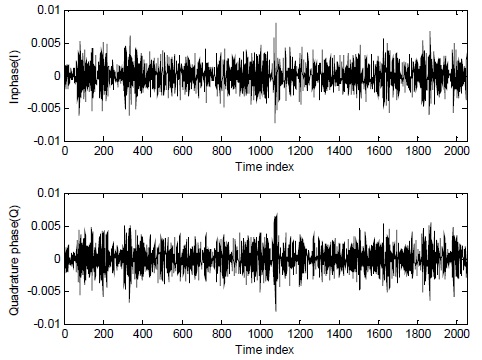
인접한 펄스열을 이용하는 기상 레이다에서의 자기상관 함수추정에서의 지연시각 Ts 는 0.25 msec 가 된다. 그림 2와 3에서에서는 r=3.3 이며 SNR=15dB 를 갖는 비대칭 가우시안 도플러 스펙트럼의 주파수 영역에서의 모의 구현 신호와 그에 대응하는 I, Q 즉 시간영역에서의 모의 구현신호를 나타내고 있다. 구현신호의 상대전력 값은 전체 배경잡음 전력을 1로 정규화 시킨 후 표시하였다.
이제 이러한 실제 기상신호와 거의 유사하게 구현된 다양한 모의신호를 활용하여 제안된 방법에 대한 성능을 기존의 방법과 비교, 분석하고자한다. 따라서 이러한 분석을 위하여 모의 기상신호의 풍속 범위, 즉 도플러 주파수를 변화시키면서 SNR 정도에 따른 도플러 주파수 추정치들의 결과들을 비교하였다.
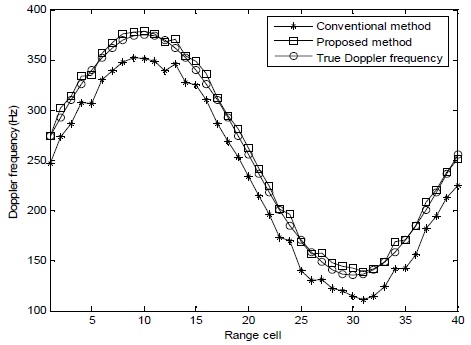
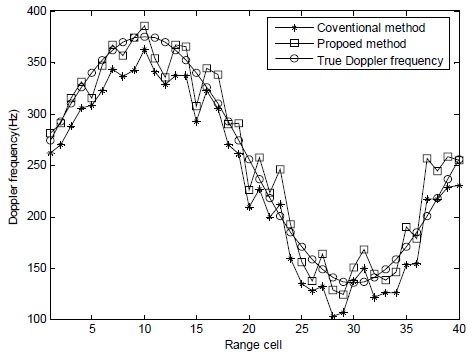
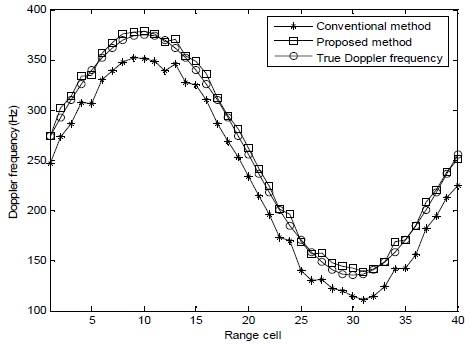
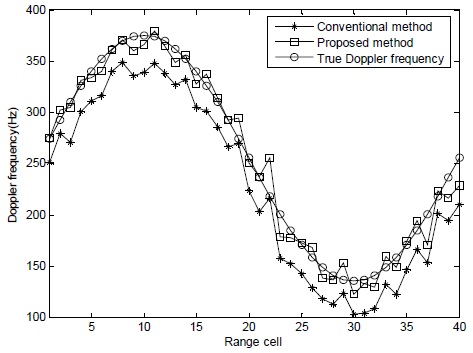
그림 4는 SNR=15dB 이며 스펙트럼 폭 w1 과 w2 가 각각 8 m/sec 및 16 m/sec 로 비교적 교란이 심한 폭이 넓은 비대칭 도플러 스펙트럼으로 따라서 r 값은 2로 설정된 경우이다. 또한 일정한 거리 영역에서의 40개의 각 거리 방(range cell) 별 풍속을 변화시키면서 그에 따른 도플러 주파수를 추정하였다. 그림 4에서의 참 값은 식(7)을 적용하여 계산한 도플러 주파수를 나타낸다. 그림 4에서 볼 수 있는 것처럼 모든 거리 방에서 제안된 주파수 추정 방법이 기존 방법에 비하여 참값에 더 근접하는 즉 훨씬 더 정확한 도플러 주파수 추정치 획득을 가능하게 해준다는 것을 확인할 수 있다.
즉, 그림 4의 경우를 다시 살펴보면 폭이 넓게 나타나는 비대칭성 도플러 스펙트럼에서는 앞장에서 설명한 바와 같은 오차가 발생함을 알 수 있다. 여기서는 r 값과 스펙트럼 폭이 일정한 상황에서의 거리 별 도플러 주파수 추정이 이루어졌기 때문에 모든 거리 방에서 거의 일정한 오차가 기존의 도플러 주파수 추정 방법에서 일어나게 된다. 그러나 실제 그림 4에서의 오차로 인한 차이가 각 거리 방별로 약간씩 다르게 나타나는 것은 모의 구현 신호가 실제 수신 기상 신호와 유사하도록 발생시키기 위하여 화이트 가우시안 배경 잡음뿐만 아니라 수신신호의 크기가 변화하는 즉, Rayleigh 분포를 갖도록 하였기 때문이다. 따라서 이러한 랜덤한 특성때문에 참값과의 오차정도는 다소 다르게 나타날 수 있다. 또한 그림 4에서 제안된 방법에 의하여 얻어진 도플러 주파수 추정치는 식(9)에서 n 값이 3인 즉 3차 모델을 적용한 것이다. 3차 모델인 경우 각각 Ts 및 2Ts 에서, 즉 두 번의 자기상관 함수 추정이 이루어져야 한다. 물론 차수가 높아질수록 추가적인 자기상관 함수 추정이 필요한 대신 추정치의 정확도는 높아질 것으로 예상된다. 그러나 그림 4에서 확인 할 수 있는 것처럼 위상의 3차 근사 모델링만으로도 거의 정확한 도플러 주파수 추정치를 얻을 수 있다. 따라서 제안된 방법을 적용 시 한번의 추가적인 자기상관 함수 추정만으로도 충분할 것으로 판단된다.
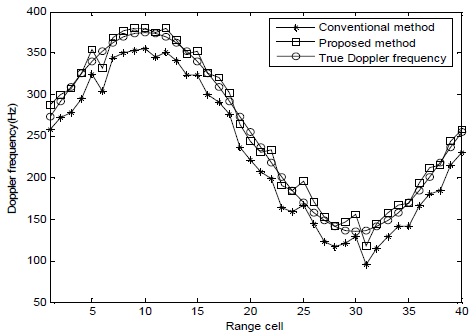
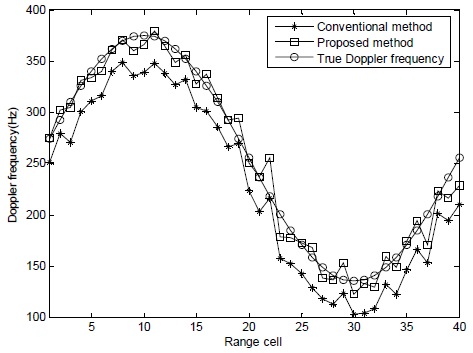
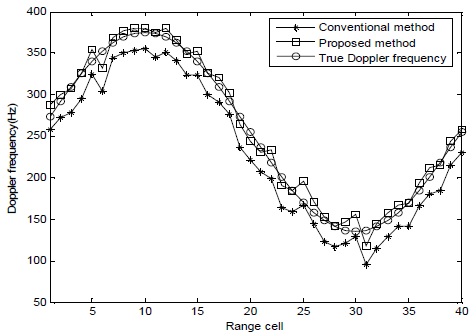
그림 5에서는 같은 기상 신호 환경에서 반사 신호전력의 감소로 SNR 값이 0 dB로 상대적으로 낮게 나타나는 경우이다. 공기 중에 비구름 등의 강우 입자 등이 없는 경우에도 즉 기상신호 전력이 매우 미약한 경우에도 풍속의 급격한 변화에 의한 위험 상황이 야기 될 수 있다. 따라서 이러한 낮은 SNR 값을 가지는 경우에도 도플러 스펙트럼 추정치의 정확도를 유지하는 것이 중요하다.
SNR 값이 0 dB 로 낮아지면 수신신호에서의 자기상관 함수 추정 즉, 위상 추정치의 불확실성이 커지게 되므로 도플러 추정치의 정확도가 저하될 것을 예상할 수 있다. 그림 5의 결과를 보면 상대적으로 약한 도플러 신호전력 때문에 도플러 주파수 추정치의 변동이 다소 크게 일어나고 있다는 것을 볼 수 있다. 그러나 이러한 경우에도 그림 5에 표시된 것처럼 여전히 기존의 방법에 비하여 3차 위상모델을 적용한, 즉 제안된 방법이 상대적으로 더 높은 정확도를 보임을 알 수 있다.
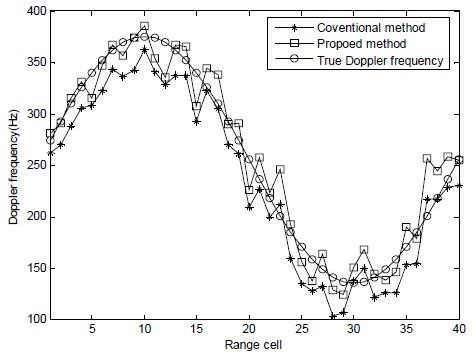
이제 SNR 값이 0dB 미만으로 매우 낮은 값을 가지는 경우를 살펴보았다. 이러한 경우 자기상관 함수 추정치 오차가 커지거나 오차 변동 폭이 확대되므로 도플러 주파수 추정의 정확도에 문제가 발생할 수 있다. 그림 6의 경우는 같은 조건에서 SNR 값이 -5 dB 일 때의 도플러 주파수 추정치들을 참값과 비교하여 나타내었다. 그림 6에서의 결과들을 보면 자기상관 함수 즉 위상추정치의 오차로 인하여 일부 구간에서는 제안된 방법, 3차 위상 모델로 구한 도플 주파수 추정치가 기존의 방법과 비슷하거나 오히려 나빠지는 현상도 발생하고 있다. 이러한 문제는 매우 낮은 SNR 로 인한 자기상관 함수 추정치의 내재적인 오차가 훨씬 크기 때문에 나타나는 현상이다. 그러므로 SNR 값이 매우 낮은 경우에는 자기상관 함수 추정에서 많은 샘플 값을 적용하면 이러한 문제를 해소할 수 있을 것이다. 즉, 수신 기상 신호샘플 숫자를 늘림으로서 낮은 SNR 에 의하여 발생하는 자기상관 함수 추정에서의 내재적인 오차를 줄일 수 있을 것이다. 따라서 다소 더 정확한 상관함수 추정이 이루어져 SNR 값의 영향이 줄어들기 때문에 추정치의 정확도가 개선될 수 있을 것이다.
그림 7의 경우는 그림 6과 같은 조건에서 샘플 펄스 숫자를 2배인 4096개로 늘려 도플러 추정치들을 구한 결과들을 나타내었다.
그림 7의 결과들에서 확인할 수 있는 것처럼 제안된 방법은 낮은 SNR로 인한 내재적인 오차를 줄임으로서 거의 모든 구간에서 더 정확한 추정치들을 나타내고 있음을 확인할 수 있다.
따라서 수신기상 신호의 SNR 이 매우 낮은 경우 정확한 자기 상관함수의 추정을 위하여 더 많은 샘플 펄스 숫자를 필요로 하는 제약이 가해지게 된다.
기상 레이다에서의 돌풍 및 기상 악천후 탐지를 위해서는 국지적으로 급격히 변화할 수 있는 정확한 풍속 정보의 추출이 매우 중요하다. 즉 탐지영역에서의 방향 및 거리 방별로 신뢰성 있는 평균 도플러 주파수 추정이 이루어져야 한다. 따라서 본 논문에서는 기존에 널리 활용되고 있는 평균 도플러 주파수 추정에서 발생할 수 있는 오차를 설명하고 분석하였으며 이러한 문제점을 극복할 수 있는 방법을 제안하였다. 제안된 방법은 자기상관함수 추정에서의 위상 값을 1차가 아닌 3차 다항식으로 모델링함으로서 오차를 최소화하는 기법을 제시하였다. 물론 이러한 방법은 하나의 지연시각이 아닌 두 개의 지연시각에 대한 자기상관 함수의 추정이 요구된다.
결과 그림들에서 확인할 수 있는 것처럼 각 거리 방별로 도플러 주파수 추정치를 참값과 비교하여 보면 대부분의 경우 기존 방법보다는 제안된 방법이 더 정확한 추정치를 표시하고 있다는 것을 알 수 있다. 그러나 기상 레이다 수신 단에서의 SNR 값이 지나치게 낮아지는 경우에는 이러한 위상 추정치들의 오차 자체가 너무 커지게 되므로 제안된 방법을 적용하더라도 큰 개선이 이루어지기 어렵다. 그런데 이러한 문제점은 SNR의 심각한 열화에 따른 내재적인 문제로서 이러한 현상이 발생할 경우 자기상관 추정치를 얻을 때의 샘플 개수를 늘림으로서 어느 정도 개선이 가능하다는 것을 확인할 수 있다. 그러나 이러한 방법은 그 개선 정도에 대한 구체적인 분석을 위한 추가적인 연구가 필요하다.
또한 기상 레이다의 경우 실시간 탐지에서의 데이터 갱신 주기나 탐지 영역 등의 문제로 실제로 수신 가능한 펄스 숫자가 제한적인 경우도 발생할 수 있다. 이러한 문제를 해결하기 위해서는 자기상관 함수 추정의 정확성을 일정한 수준까지 담보하기 위한 충분한 기상 수신신호 획득 시간 확보 또는 탐지 거리 영역을 상대적으로 줄이거나 송신전력을 크게 함으로서 SNR 값을 높이는 방법도 고려하여야 할 것이다.
제안된 방법은 기존 방법에 비하여 추가적인 지연시각에서의 자기상관 함수 추정이 필요하므로 연산 량이 약 2배정도로 늘어 날수 있다. 그러나 앞에서 언급한 바와 같이 3차정도의 다항식 계수 추정에 필요한 추가적인 연산요구량은 그렇게 문제가 되지 않으며 전체 스펙트럼을 추정하는 FFT 방법을 적용하는 것에 비하면 비교할 수 없을 정도로 효율적이다. 다만 여기서 제안된 방법의 성능 개선 효과가 별로 나타나지 않는 경우는 매우 낮은 SNR 의 경우이다. 그러나 이러한 경우에는 일반적으로 탐지거리 영역을 좁혀서 SNR 값을 개선하거나 또는 샘플수를 더 얻기 위하여 안테나 회전수를 적절하게 조정함으로서 개선효과를 얻을 수 있을 것으로 판단된다.
그러므로 본 논문에서 제안한 개선된 방법을 적용한다면 풍속 정보 추출, 즉 도플러 주파수 추정에서의 오차를 최소화함으로서 기상 레이다 시스템의 성능 향상에 큰 도움이 될 것으로 기대된다.