High resolution and accurate elevation of Earth or other planets can be acquired using space-borne laser altimeters. The range between the reference center on a satellite and the target surface is calculated by measuring the round-trip propagation time of short laser pulses, and other information such as surface roughness, slope, and reflectivity can also be measured through processing the received waveform. The Geoscience Laser Altimeter System (GLAS) on the Ice, Cloud and land Elevation Satellite (ICESat) with small footprint and along track spacing provided more accurate surface elevation and higher horizontal resolution on Earth observation, and was widely used to monitor ice sheet, sea ice, vegetation, and other changing environments [1-3].
A Nd:YAG laser of fundamental mode was used in the GLAS system, and the cross section of the transmitted laser pulse satisfies a 2-dimensional Gaussian distribution, which means the majority of total energy focuses on the small central region, and decreases rapidly with the rising radius. Under this kind of energy distribution, the reflection of surface covering which locates on the center of the laser footprint will play a much bigger role in the received waveform. The energy distribution on the cross-section of a flattened Gaussian laser beam is more uniform than that of the fundamental mode, and the energy is nearly a constant in more than half of the total cross-section under the higher order beam. It is more suitable to detect the complex coverings of the Earth’s surface.
Currently, the waveform model of fundamental mode laser used in GLAS was established by Gardner, Tsai, etc [4-6]. In this paper, the expressions of the main parameters of the laser altimeter waveform under flattened Gaussian laser were derived, and these results were used to compute total received energy, pulse width, variances of the propagation time delay and ranging error. A waveform simulator and parameter extraction program were used to verify the analytical expressions, which were universally used for both the flattened Gaussian beam and conventional fundamental mode ones. The effects of laser speckle, shot noise, and surface profile of the target were considered, and the influence of varying laser mode was quantitatively analyzed.
For the fundamental mode laser, the laser cross-section and waveform of the transmitted laser pulse are both assumed to be Gaussian in shape:


Where

According to Eq. (1), Eq. (3) is normalized processed, and is shown in Eq. (4).
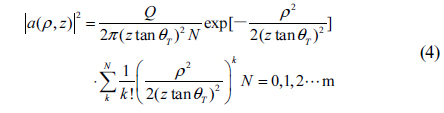
The transmitted laser pulse undergoes Fresnel diffraction during propagation, and then it is reflected by the Earth’s surface. After another Fresnel diffraction, the incident laser light on the telescope is focused onto the photoelectric detector, and the received signal power is given by: [9]

η is the efficiency of the receiver optics and detector,

The essential parameters of the received waveform consist of the expected number of detected signal photons denoted by
If we assume the reflection coefficient
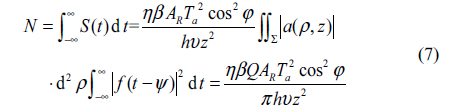
Eq. (7) indicates that the received energy is irrelevant to transmitted laser mode, but related to transmitted laser energy, which means if the transmitted laser energy, the target surface, and the parameters of atmosphere and detector are the same, altering lasers from fundamental mode to flattened Gaussian does not actually change


In both Eq. (9) and Eq. (10), the received pulse widths are composed of 4 items. The transmitted pulse width is described as the first term, and the broadened effects produced by surface roughness of the ground target, modified slope, and the beam curvature are shown as the second, third and fourth terms, respectively. For a beam divergence of tens of μrad on a common laser altimeter system, the broadening effect of the last term is relatively weak and can be ignored. Actually, when the order in Eq.(4) is
According to the reference [9], the variance of


Under weak signal circumstances such as a space-borne laser altimeter system, shot noise is the dominant noise source. In Eq. (11),

By substituting Eqs.(1), (4) and (13) into Eq. (11) and integrating over ρ, the variance of
As for the GLAS system, the satellite altitude is
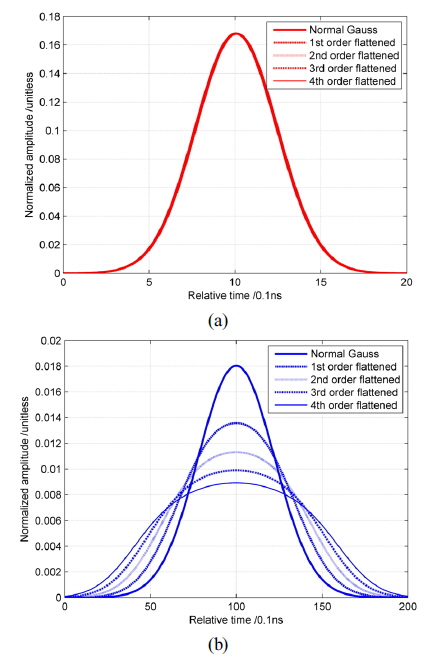
According to the document related to the laser altimeter simulator given by NASA [11], the waveform simulator software was programmed in MATLAB codes, and was improved to run under a flattened Gaussian laser. The received waveform could be simulated by substituting the system parameters and assumed or actual surface profiles. Firstly, according to Eq. (1), the continuous laser waveform is discretized into a time series, and the sampling interval is 0.1ns typically. Then, as shown in Eq. (2) or (4), the cross section intensity of the transmitted beam is Gaussian or flattened Gaussian in the far-field, and on the target surface, the total energy of the incident beam is divided into a finite number of grids, 0.2 m × 0.2 m for a typical GLAS laser footprint. The reflected intensity and range delay are calculated independently for each grid, and the height and diffuse reflectivity can be specified independently for each grid on the surface profile. We use the GLAS system parameters as shown above, and set grid bin of surface profile to 0.2 m × 0.2 m and time bin to 0.1 ns, then the simulated waveforms are shown in Fig. 1.
In Eq. (7), we proved that if the transmitted laser energy and measuring environment were kept the same, the laser mode would not affect the received laser energy. Consequently, in Fig. 1 the received laser energy of different laser modes were normalized. When modified slope is
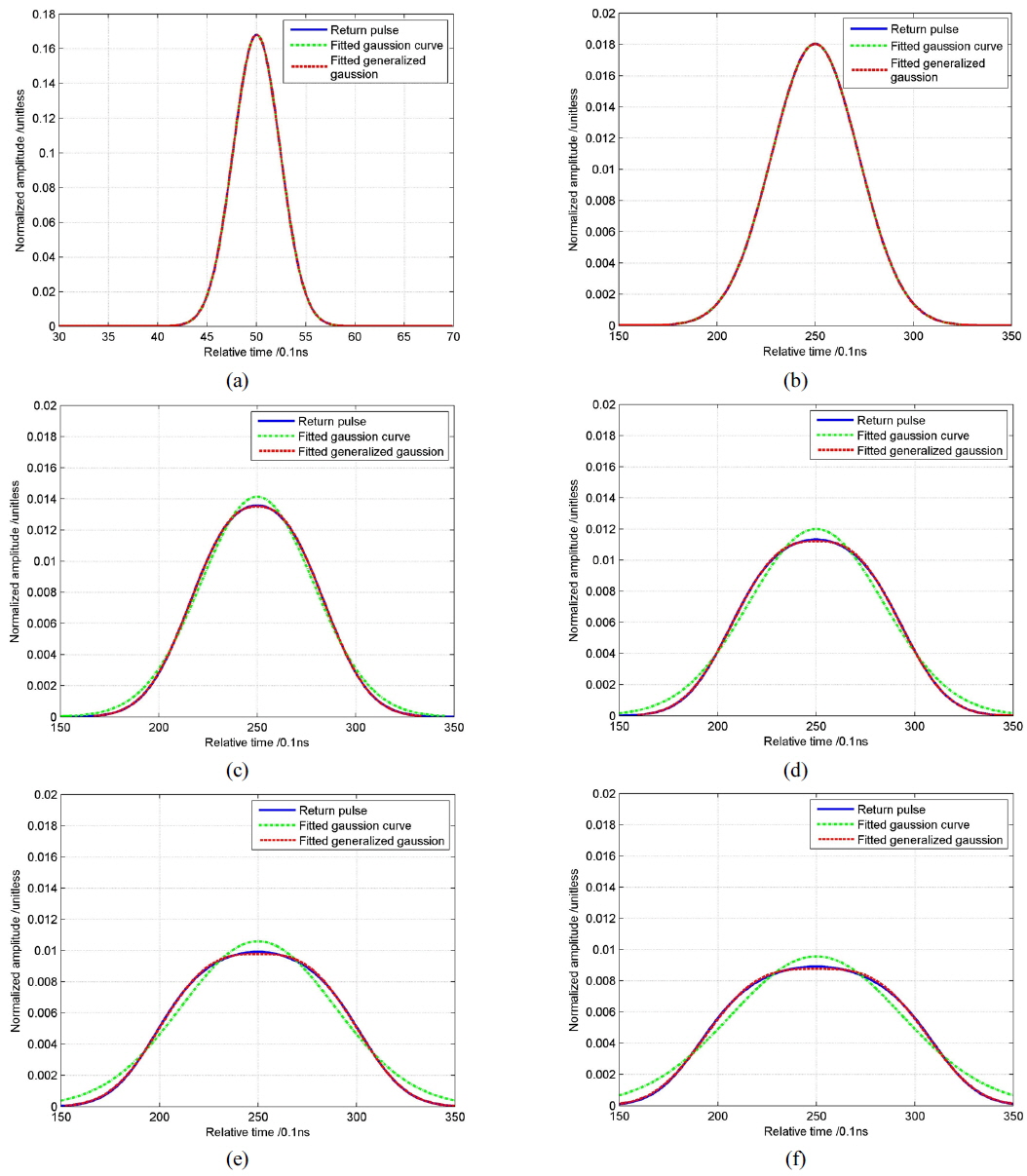
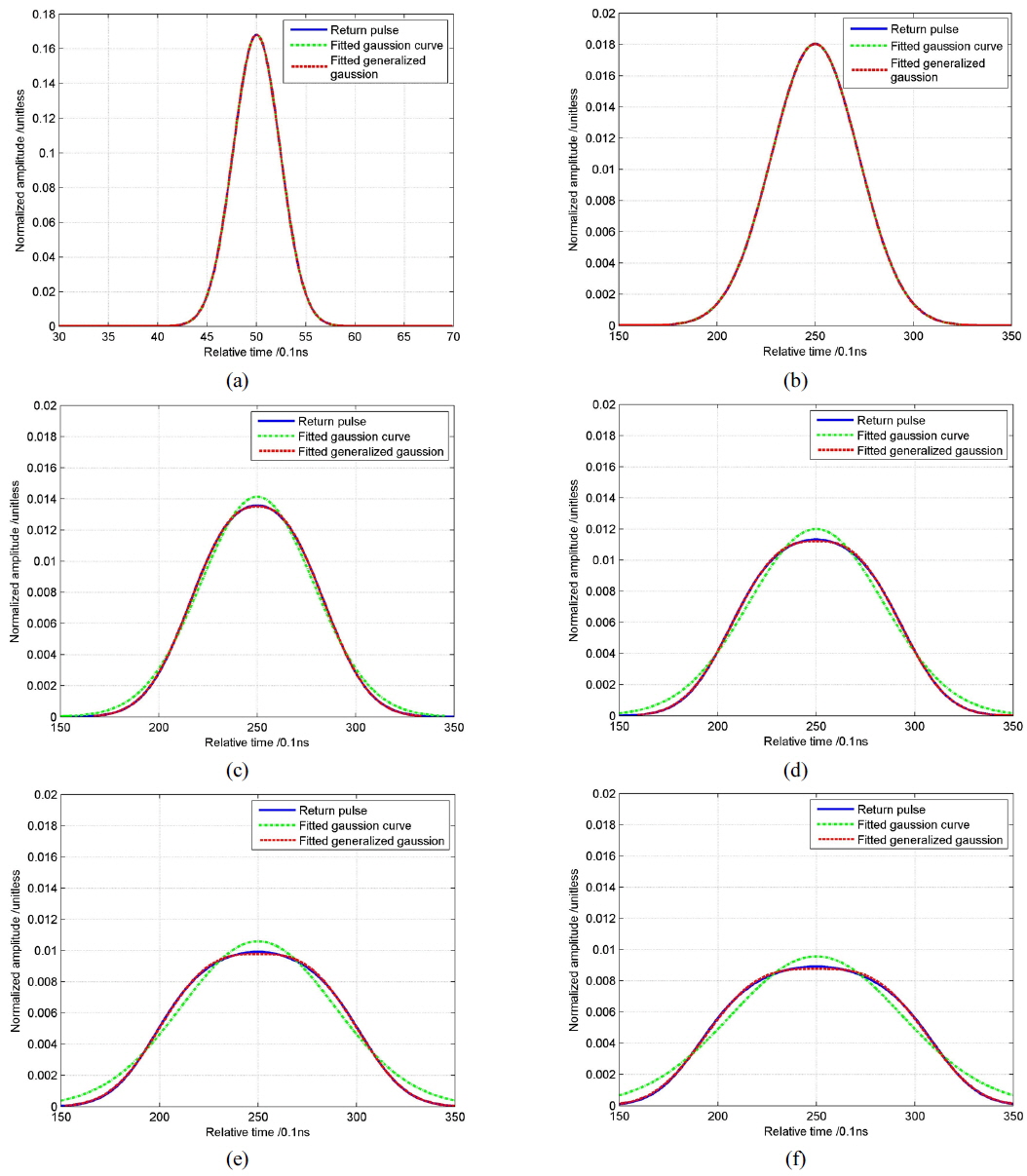
0.05 is a typical slope in the icesheet region, because the slope of icesheet is slight in inland Antarctica, approximately ~1:1000, and increases from inland to coastal area. The surface slope is less than 1:300 in more than half of the total region, and is less than 3:200 in 90% of the total. [12] As shown in Fig. 1, the pulse widths broaden as the order of flattened Gaussian laser increases, whose trend agrees with Eq. (10), while the peak values of waveforms are inversely proportional to the order.
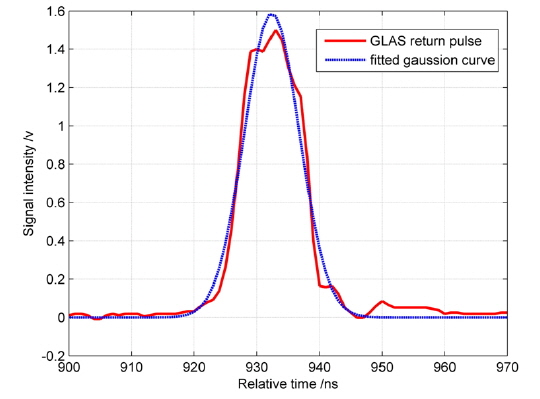
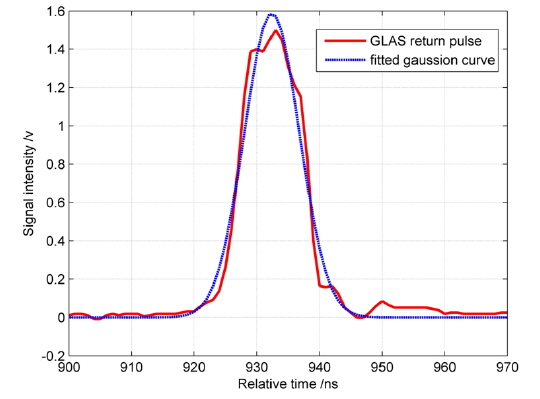
In order to evaluate whether or not the simulated waveform precisely corresponds to the analytic expression shown as Eq. (10), we first should ensure that the pulse widths extracted from simulated waveforms are correct. So, one measured waveform by GLAS in Antarctica in March 2003 was chosen, illustrated in Fig. 2, to compare the main parameters given by NASA official GLA05 records and extracted by our waveform processing program based on the theory and method described in reference [6, 13]. In GLAS Algorithm Theoretical Basis Document, the transmitted and received waveform were treated as single Gaussian function or a sum of several, and the Gaussian parameters were extracted by Gaussian fit based on least squares algorithm.
The transmitted width with
[TABLE 1.] Contrast between theoretical and simulated waveform widths under different order beams

Contrast between theoretical and simulated waveform widths under different order beams
As shown in Table 1, the simulated and theoretical pulse widths are nearly the same with all biases less than 1ns or 3%, which verifies the expression in Eq. (10). The comparison between Fig. 3 (a) and (b) shows that under the same laser of fundamental mode, the pulse width of waveform reflected by a flat surface is only about one-tenth than that of a surface with slope φ = 0.05, while the peak value is approximately ten times as high. Both shapes of waveform are Gaussian functions.
The domains of coordinate axes in Fig. 3 (b)-(f) are the same. We can see clearly that the peak value decreases, the width increases as the order
Besides, as the order

Where
[TABLE 2.] Parameters fitted by generalized Gaussian model

Parameters fitted by generalized Gaussian model
When laser ranging is based on the time of flight, the ranging error or ranging precision arising from the laser itself and the target will be the product of uncertainty of timing and half of the velocity of light, and it can be expressed in Eq. (17), where ‘std’ means standard deviation.

We substitute

If we assume atmospheric transmittance is
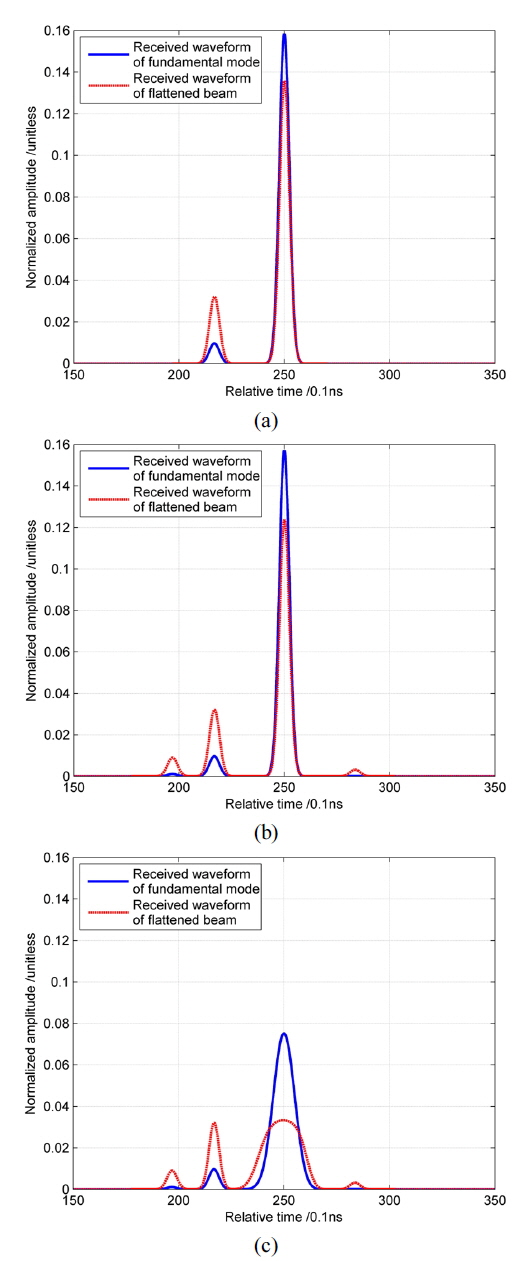
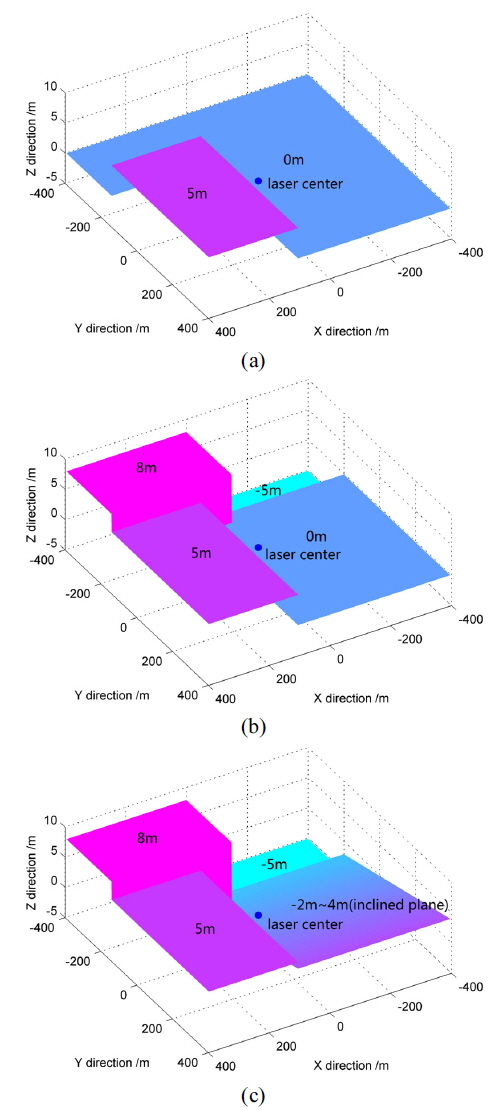
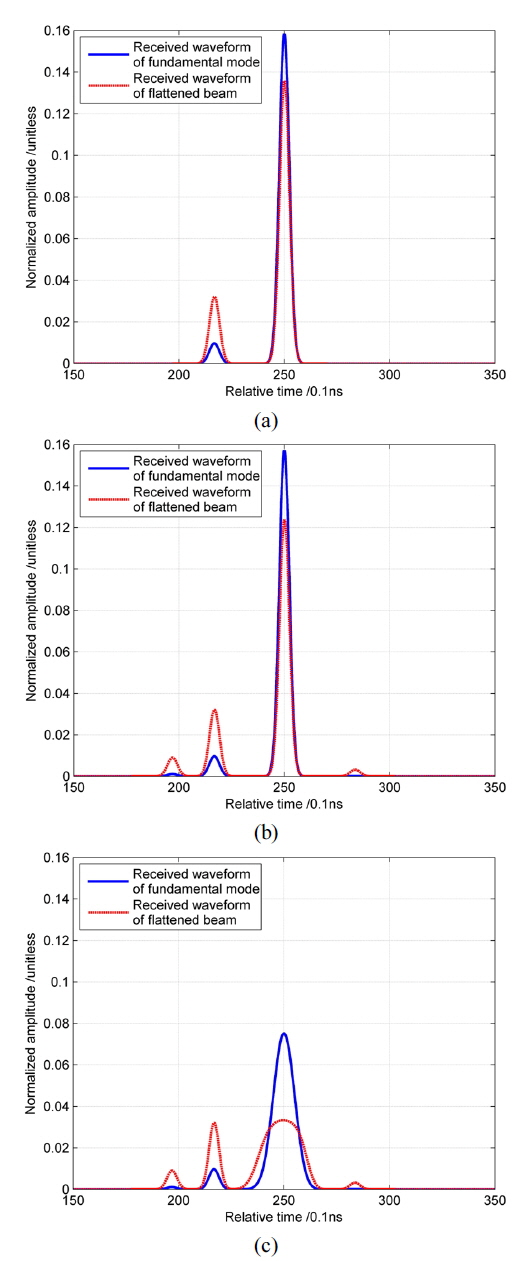
In the above content, all the targets are assumed to be a single quasi-flat surface, however, the actual target would be much more complicated. As a result, if we assume that there are two quasi-flat surfaces on the target, which is shown in Fig. 4 (a) and can be considered as a building with 5m height on the ground. In Fig. 5 (a), the simulator shows the corresponding waveforms of fundamental mode and 4th order flattened beam. Then, we assume that there are two buildings with different heights and a pit on the ground, shown in Fig. 4 (b), and finally the ground is changed to be an inclined plane with 0.01 slope, shown in Fig. 4 (c). As for GLAS parameters, the divergence
The transmitted laser energies are the same, and we can clearly find that the flattened beam get much better performance for a multi-surface target. In Fig. 5 (a), both lasers indicate that there are two surfaces on the target, but the first waveform peak of fundamental mode with approximately 0.01 amplitude, which corresponds to the 5 m height building, is much less than that of flattened beam with over 0.03 amplitude. And the time interval between two peaks of waveform could invert the distance of two surfaces of target. In Fig. 5 (b) and 5 (c), when the areas of new surfaces become smaller and further from the laser center, we can hardly recognize the corresponding peaks in waveform, and the last peak of the fundamental mode has completely disappeared. The reason is that the energy of the fundamental mode decreases rapidly with the radius of laser footprint rising, while flattened Gaussian laser beam is more uniform than that of fundamental mode and can reflect the effects of target surface far from the laser center.
Although the ranging error of flattened Gaussian beams is bigger than that of the fundamental mode, typically for 10.3 cm under 4th order compared to less than 1 cm with 0.05 slope, the flattened beams could detect more details of the target. And if the surface is flat without slope, the ranging error is the same under flattened Gaussian beams and the fundamental mode. Besides, the derived ranging error expression in this article is arising from the laser itself and the target, which is only part of the total ranging error, and another main influencing factor is pointing errors, 1.5″ of which makes 21.8 cm ranging error with 0.05 slope for typical GLAS parameters [15, 16]. According to law of error propagation, the total ranging error is equal to the root of the sum of every error squared.
The main parameters of received pulse under flattened Gaussian laser were derived and verified through waveform simulator and processing, and the bias between simulated and theoretical pulse widths were less than 3%. These new expressions of flattened Gaussian laser were universal compared to the former fundamental mode, and could be used not only under flattened Gaussian lasers but also fundamental mode when the order was set to be zero.
Both the pulse width and ranging error increase as the modified slope and flattened Gaussian order grow; therefore, laser altimeter will get more accurate ranging performance under small nadir angles, meaning nearly normal incidence, and small surface slope. As for received waveform of higher order flattened Gaussian, the shape deforms and is no longer a strict Gaussian function, because the incident energy of laser footprint does not satisfy 2-dimensional Gaussian distribution. Generalized Gaussian model was used to express these curves and got very good fit results, and the physical interpretation of generalized Gaussian model needs to be researched in the future.
The flattened beam got much better performance under the circumstance of multi-surface target, especially when the small surface is far from the center of the laser footprint, and it is more suitable to detect the complex coverings of the Earth’s surface. In addition, the established expressions and waveform simulator are meaningful to the system design of the flattened Gaussian laser altimeter.