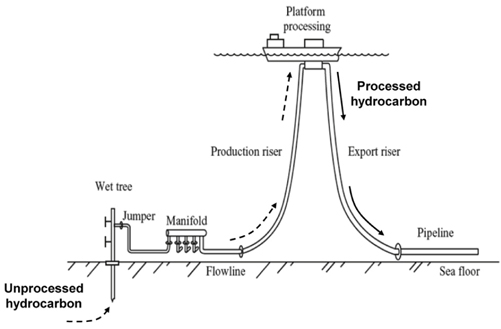
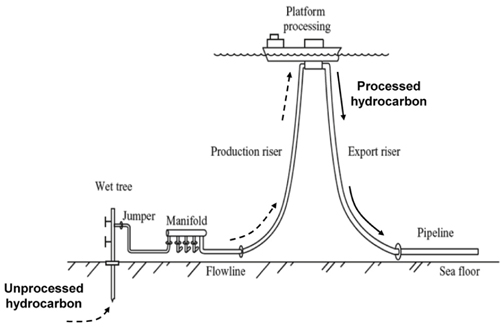
일반적으로 해양에서 오일과 가스를 생산하기 위해서는 생산 및 수송 파이프라인(Flowline, Pipeline, Riser), 처리시설(Processing unit)이 포함된 고정 또는 부유식 플랫폼, 생산시스템 등이 필요하다. 생산 파이프라인은 해저트리(Subsea tree)에서 메니폴드(Manifold)로 비정제된 탄화수소를 라이저(Riser)를 통해 운송한다. 운송된 비정제 탄화수소는 처리시설에서 1차적으로 정제되며, 1차 정제된 탄화수소(오일 또는 가스)는 수송 파이프라인을 통해 지상의 2차 정제 및 저장시설로 운반된다. 이때 생산 라이저는 생산 파이프라인의 수직부로서 생산 파이프라인에서 플랫폼으로 연결되며, 수송 라이저는 수송 파이프라인의 수직부로서 생산 플랫폼 탑사이드(Topside)에서 수송 파이프라인으로 연결된다. 이러한 탄화수소의 개략적인 흐름은 Fig. 1에 제시되어 있다.
많은 종류의 라이저 중에서, SCR(Steel catnary riser)은 저비용, 고온/고압 저항성 등으로 인해 심해 오일 및 가스 생산에 널리 활용되고 있다. 이중 고온/고압에 대한 저항성능 만족을 위해 최근들어 내식저항합금(Corrosion resistant alloy, CRA) 파이프가 라이저 구조물 설계에 적용되기도 한다(Yu et al. 2014). SCR은 고정식 플랫폼 뿐만 아니라 TLP(Tension leg platform), FPS(Floating production system), FPSO(Floating production storage, and offloading unit), Spar 등에서 널리 사용되고 있다.
하지만 천해에서 심해로 수심이 깊어질수록 SCR은 강도 및 피로에 문제가 발생하게 된다(Bai and Bai, 2005). SCR의 강도문제는 크게 세가지로 분류할 수 있다. 첫째, 상부 플랫폼과의 연결부(Hang-off location)에서 발생하는 큰 인장력에 의한 과도한 von Mises 응력, 둘째, 해저면과의 접촉면(Touchdown zone, TDZ)에서 발생하는 압축에 의한 좌굴응력, 마지막으로 해저면과의 접촉면에서 발생하는 응력(휨모멘트, 축력, 내압/외압)에 의한 재료항복 및 저주기피로(Low-cycle fatigue)이다. 수심이 깊어질수록 외부하중 및 SCR의 자중이 커지기 때문에 SCR에 발생하는 인장력이 커지게 된다. 따라서, SCR의 허용응력 범위내에서 작용할 수 있는 휨응력이 작아지게 된다. 일반적으로 이러한 강도관련 문제는 고강도 강재 사용, SCR과 플랫폼의 연결부를 가능한한 플랫폼 거동의 중심에 위치, 해저 접촉면에서의 SCR 두께 증가 등으로 해결할 수 있다. SCR의 피로손상은 파랑하중에 의한 플랫폼의 거동(Wave-induced hull motion), SCR의 와류진동(Votex-induced vibration), 플랫폼의 상하운동(Heave motion)에 의한 SCR의 와류진동 및 설치시 피로 등 많은 요인에 의해 발생한다. 특히, 수심이 깊고 조류가 심한 곳에 설치된 SCR은 와류진동에 의한 피로 손상이 상대적으로 증가할 수 있으며, 이에 대한 방지책으로 스트레이크(Strake), 페어링(Faring) 등의 와류진동 저감장치를 부착하기도 한다. 실제 해양공사에서는 SCR을 설계하기 위한 해석들이 대다수 해외 엔지니어링 업체에 의하여 수행되고 있는 형편이며, 국내에서는 아직까지 생소한 분야라고 할 수 있다. 따라서, 본 논문에서는 SCR 해석중 강도해석 및 간섭해석 절차를 설명하고 수치예제를 통해 심해에서의 SCR 거동을 분석하였다.
2. SCR 해석방법 (
강도해석은 설계된 SCR이 운영, 극한, 생존 하중조건에서 강도 기준을 만족하는지 여부를 확인하기 위해 수행한다. 일반적으로 심해의 경우 와류진동에 의한 SCR의 피로성능을 향상시키기 위해 앞서 설명한 봐와 같이 와류진동 저감장치를 설치한다. 와류진동 저감장치는 SCR의 외부 하중을 지지하지 않지만, 설치된 저감장치로 인해 중량, 외경, 동유체력 계수 등과 같은 SCR의 특성치가 변하기 때문에 강도해석시 와류진동 저감장치를 모델링 해야 한다. 와류진동 저감장치의 중량은 SCR 중량에 추가되며 해석을 위한 모델링 시에는 와류진동 저감장치의 실제 직경이 아닌 수중 중량에 기초한 유체동역학적 직경을 사용해야 한다. 극한하중에서 발생한 플랫폼 및 SCR의 변위로 인해 해저 접촉면에서 SCR은 지속적으로 분리와 접촉이 일어나기 때문에 SCR의 응답을 구하기 위해서는 비선형 시간이력 해석을 수행해야 하며, 일반적으로 시간이력 해석 수행 시, 플랫폼의 운동은 진폭응답함수를 이용하여 적용하게 된다. 이러한 SCR의 거동특성을 반영한 일반적인 단계별 강도해석 절차는 다음과 같다.
(1) 정적 평형 해석 (Static equilibrium analysis without loading)
정적 평형 상태를 구하기 위해서는 플랫폼, SCR, 계류선을 함께 모델링 해야 하며, SCR과 계류선의 해저 접촉점(Touchdown point, TDP)을 구함으로써 동적해석을 위한 SCR과 계류라인의 모델링에 소요되는 길이를 근사적으로 구할 수 있다.
(2) 환경하중 정적해석 (Static analysis for environmental loading)
일반적으로 해양에서 발생하는 하중은 크게 풍하중, 파랑하중, 조류하중으로 나눌 수 있다. 이러한 하중들은 정적성분과 동적성분으로 구분할 수 있으며 정적성분을 이용해 정적해석을 수행 할 수 있다. 이러한 환경하중 정적해석을 통해 동적해석 이전에 구조물(SCR, 계류라인)의 응답을 예측할 수 있으며 TDZ 길이, 메쉬크기 등의 상세 모델링 요소들을 결정할 수 있게 된다.
(3) 환경하중 동적해석 (Dynamic analysis for environmental loading)
동적해석은 구조물의 모든 하중(풍하중, 파랑하중, 조류하중)을 재하한 상태에서 식 (1)과 같은 동적 운동방정식을 통해 구조물의 응답을 계산하는 것이며, 앞서 기술한 환경하중 정적해석 후 수행한다.

여기서
앞서 설명한 강도해석은 생산 플랫폼에 설치된 SCR뿐만 아니라, SCR 설치시 발생하는 응력을 검토하기 위한 설치해석을 별도로 수행하게 된다. SCR 설치 해석시에는 계류라인이 없기 때문에 별도의 계류라인은 고려하지 않으며, 관련한 설치해석 기법은 Choi and Jo(1999)에 제시되어 있다.
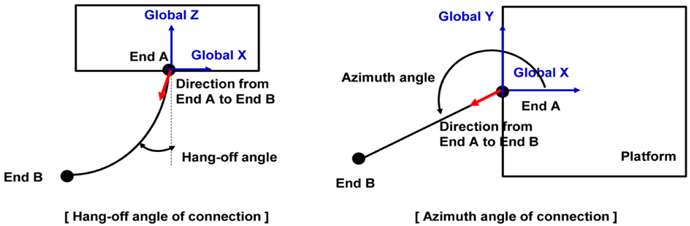
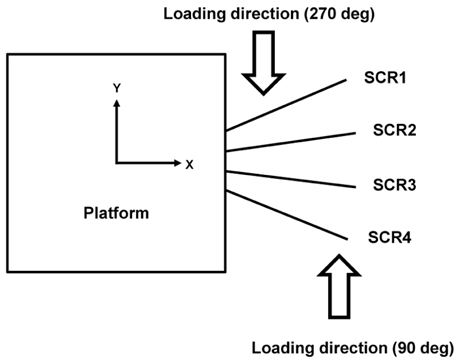
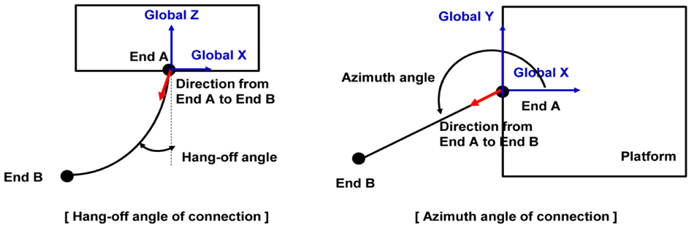
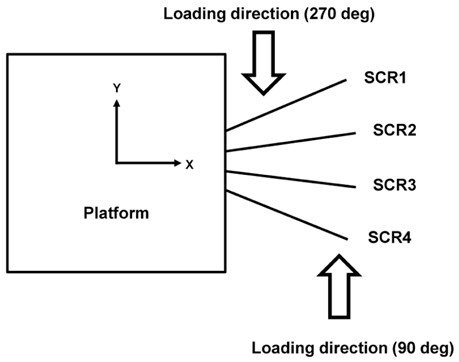
간섭해석은 설치된 SCR이 주변 구조물, 계류라인, 기타 케이블과 충돌하지 않도록 충분한 간격을 확보할 수 있는지 검토하기 위해 수행한다. 일반적으로 SCR이 이루는 평면과 직각으로 환경하중이 재하되는 경우에 대하여 최소간격이 발생하기 때문에 후류효과를 고려하여 비선형 시간이력 해석을 수행하게 된다. 후류효과를 포함한 다수의 라이저간의 간섭효과에 대한 상세내용은 Huse(1993)에 제시되어 있다. 간섭해석 결과 충돌이 발생할 경우 Fig. 2와 같은 SCR과 플랫폼의 수직 설치각도(Hang-off angle, HOA), SCR의 평면 설치각도(Aziumth angle), SCR과 플랫폼의 설치위치(Hang-off slot/porch)등의 설계변수를 이용해 충돌을 방지해야 한다.
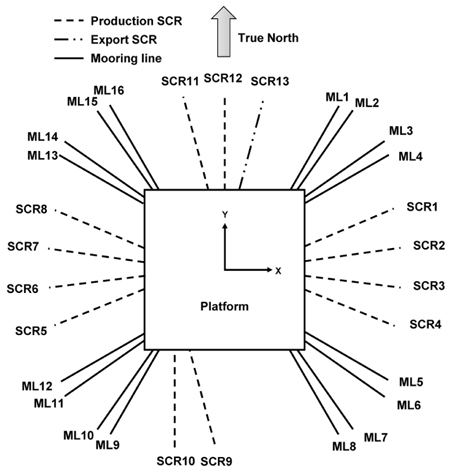
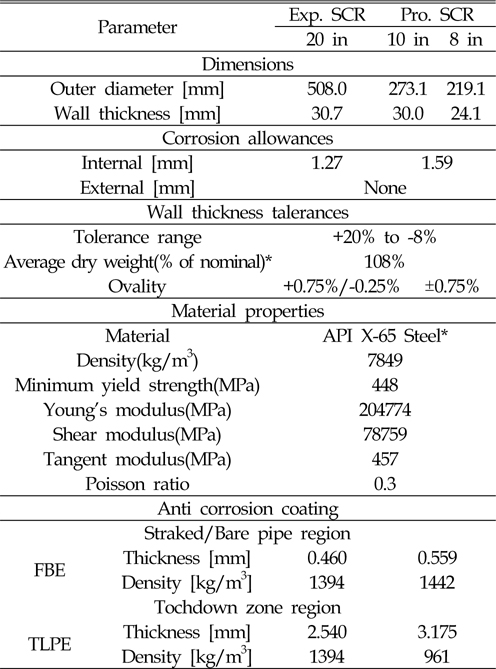
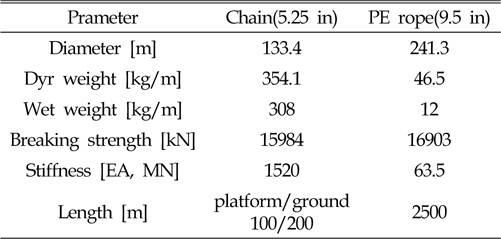
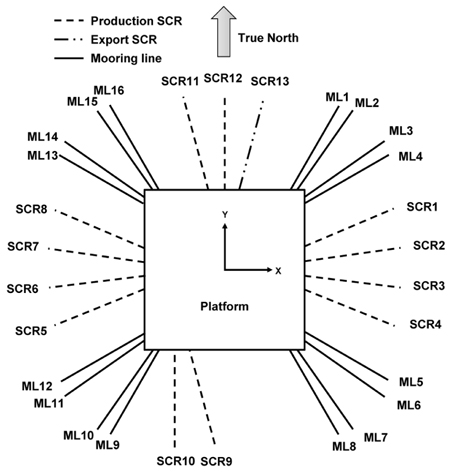
심해 SCR 해석을 위해 본 논문에서 고려한 모델은 Fig. 3과 같다. 총 13개의 SCR(가스 생산 SCR 12개, 가스 수송 SCR 1개)이 심흘수 반잠수식(Deep draft semi-submersible) 플랫폼에 설치되었으며, 플랫폼을 제어하기 위해 총 16개의 계류라인을 설치하였다. 설계수심은 초심해인 2,000m로 가정했으며, SCR은 플랫폼 연결부에서 6m 간격으로 설치했고, 설치각도 효과규명을 위해 12도 및 14도의 수직 설치각도를 고려하였다. 심흘수 반잠수식 플랫폼, SCR 및 계류라인의 주요 제원은 Table 1~3과 같다.
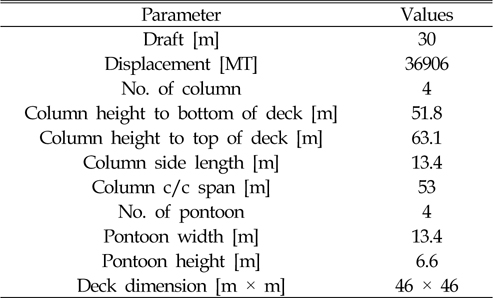
[Table 1] Deep draft semi-subersible principal dimension
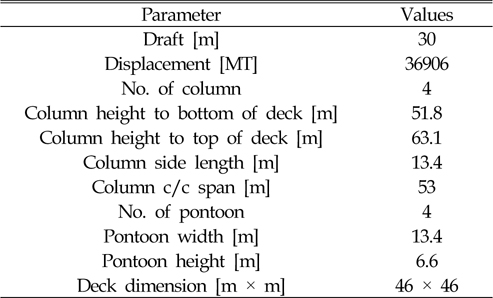
Deep draft semi-subersible principal dimension
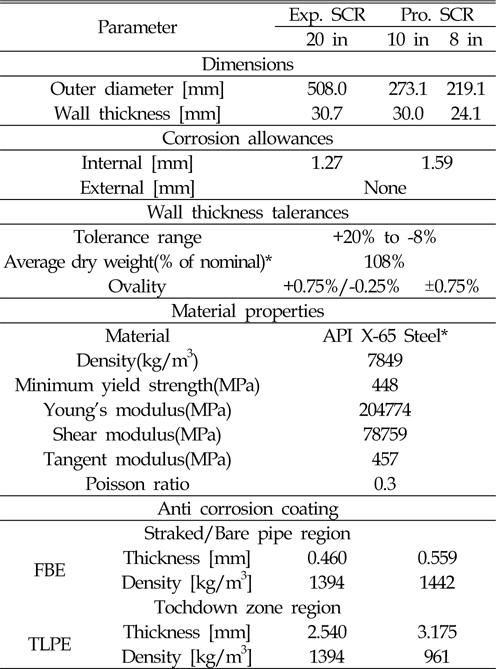
SCR structural data
[Table 3] ML component properites
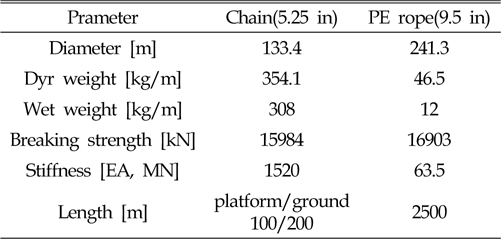
ML component properites
SCR은 플랫폼과의 연결부 또는 해저 접촉면에 경계조건이 형성되기 때문에 이 지점에서 가장 큰 응력분포를 나타낸다. 일반적으로 플랫폼과의 연결부는 플렉스 조인트(Flex joint)나 TSJ (Tapered stress joint)를 설치해 과도한 휨응력을 제한하게 된다. 본 논문에서는 TSJ를 모든 SCR과 플랫폼 연결부에 적용하였다. 또한 심해 SCR의 경우 와류진동에 의한 피로손상을 저감시키기 위한 별도의 장치가 필수적으로 설치된다. 따라서 본 논문에서는 이러한 와류진동 저감장치중 스트레이크를 적용했으며 스트레이크 설치 위치 및 길이는 SCR의 모달정보을 통해 결정되었다.
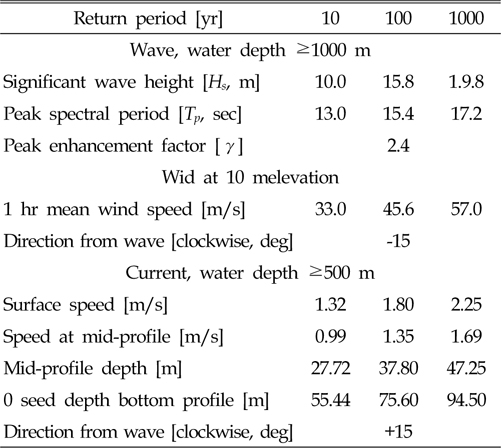
본 논문에서 고려된 수심은 2,000m 이며 Table 4와 같은 API2INT-MET(API, 2007)에서 제시하는 멕시코만(Gulf of Mexico, GOM) 중앙지역의 파랑하중 데이터를 사용하였다. API2INT-MET에서는 파랑하중과 동시에 작용하는 풍하중 및 조류하중의 방향에 15도의 편차를 고려하였으나, 일반적으로 보수적인 설계를 위해 모든 하중은 동일방향으로 가정한다.
[Table 4] Combined values for hurricane waves, winds, and currents
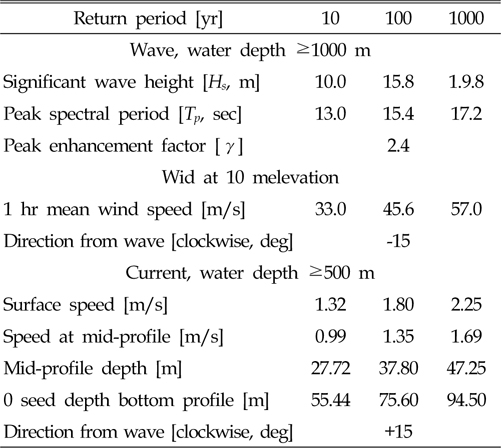
Combined values for hurricane waves, winds, and currents
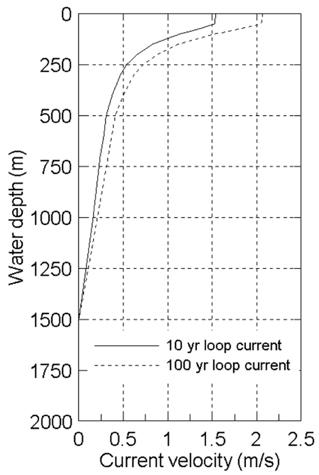
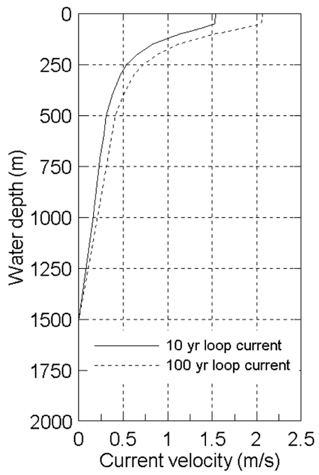
멕시코만 지역 쿠바와 유카탄 사이에 위치에 있는 캐리비안해로부터 유입되는 시계방향 또는 반시계방향의 조류로 인하여 발생하는 순환조류는 SCR의 피로손상의 주된 원인이다. 이러한 순환조류는 피로해석 뿐만 아니라 강도해석에도 고려해야 한다. 본 논문에서는 Fig. 4와 같은 멕시코만 지역의 일반적인 순환조류를 고려하였다.
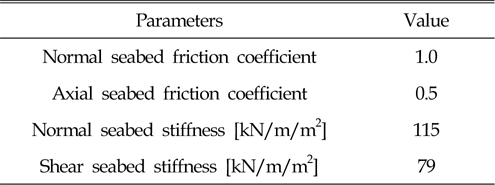
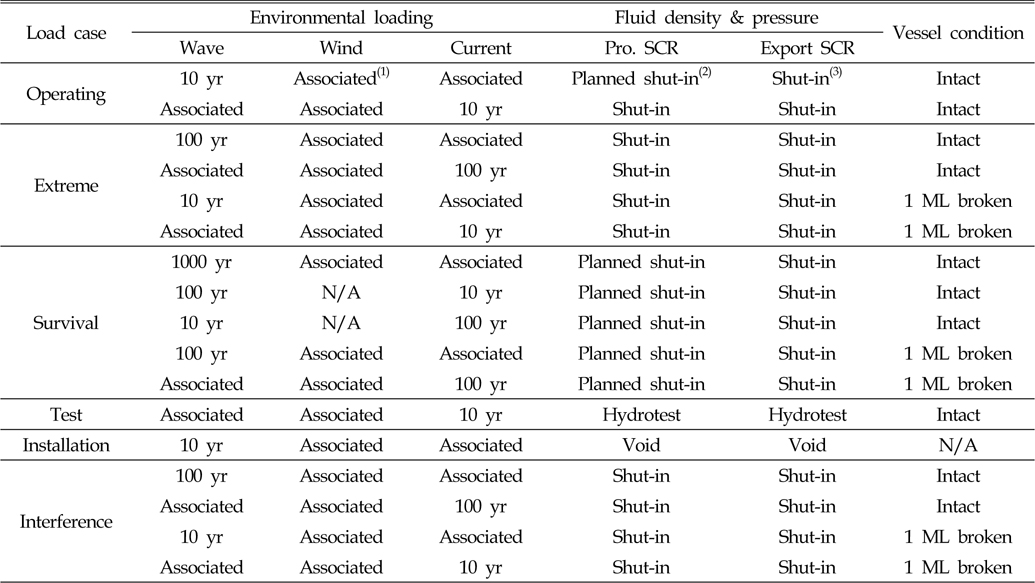
본 논문에서는 평평한 해저면을 가정했으며 Table 5와 같이 멕시코만 지역에 사용되는 지반변수를 MCS (MCS, 2005)를 참고해 고려하였다. Table 6은 MCS (MCS, 2005)를 참고로 본 논문에서 사용된 하중조합을 나타낸 것이다. 일반적으로 SCR 해석시 다양한 하중조합이 고려되는데 기본적으로 하중범주(운영하중, 극한하중, 생존하중, 실험하중, 설치하중), 지배하중(파랑하중, 풍하중, 조류하중), 계류라인 상태(계류라인 미파손, 일부 계류라인 파손), 하중방향(0, 45, 90, 135, 180, 225, 270, 315 도)을 고려하여 하중을 조합하게 된다. 각 하중조합에 대한 설계기준(허용응력)이 다르기 때문에 SCR 강도설계를 지배하는 하중조합을 사전에 예측할 수 없다. 따라서, Table 6에 제시된 모든 하중조합에 대해 해석을 수행해야 한다.
[Table 5] Soil friction coefficient and stiffness
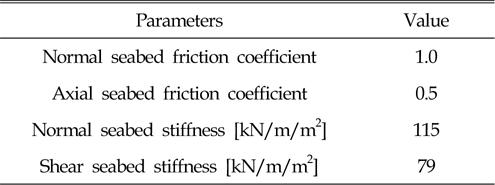
Soil friction coefficient and stiffness
[Table 6] Design load case matrix
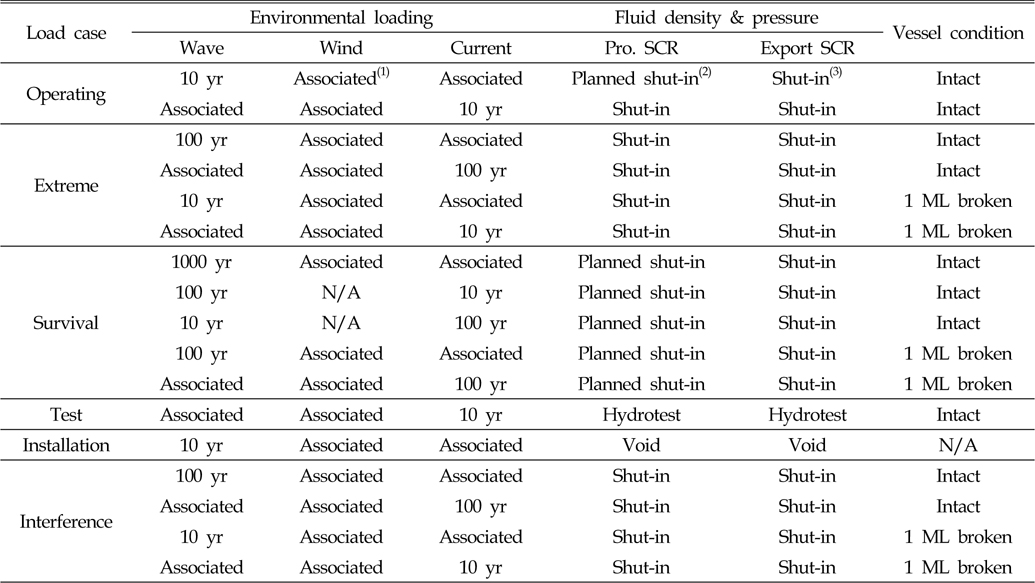
Design load case matrix
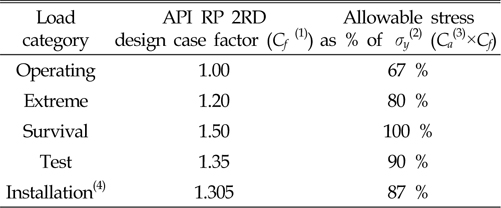
일반적으로 SCR은 API RP 2RD (API, 1998)에 기준에 의해 설계된다. 응력검토를 위한 하중조건에 대한 SCR의 허용응력은 Table 7과 같이 API RP 2RD의 5.2절에 제시되어 있다. 설치해석과 관련해서는 DNV-OS-F101(DNV, 2007) 기준을 고려하였다. SCR의 응력계산시 원주응력은 허용부식두께를 고려했으며, 축응력 및 반경응력은 공칭단면을 고려하였다.
[Table 7] SCR allowable stress
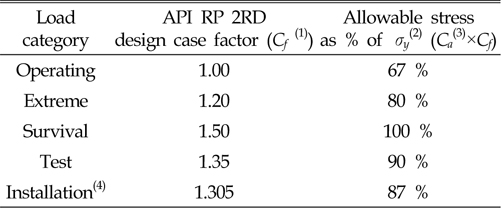
SCR allowable stress
간섭해석에 해당하는 하중조합에 대해 SCR은 주변 구조물과 충돌하지 말아야 한다. 이때 SCR과 인접 구조물의 최소간격은 모든 코팅 및 와류진동 저감장치를 고려한 SCR의 평균 직경에 2배 이상이어야 한다(MCS, 2005).
본 논문에서는 Orcina사에서 개발한 OrcaFlex (Orcina Ltd., 2013)을 사용하여 비선형 시간영역 해석을 수행하였다. OrcaFlex는 3차원 비선형 시간영역 해석을 수행할 수 있는 해양분야에 특화된 유한요소해석 소프트웨어이다. OrcaFlex는 라이저, 계류라인, 예인 시스템 등을 해석할 수 있으며 해양분야에서 사용되는 파이프라인, 플랫폼, 부표, 윈치, 해저면 등을 손쉽게 모델링 할 수 있다.
(1) 메쉬크기 영향
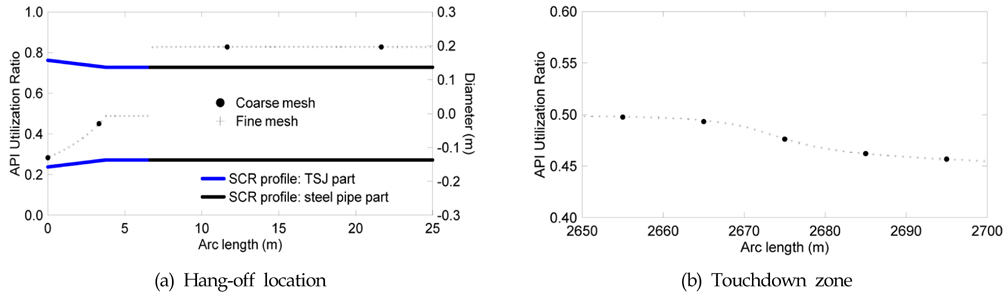
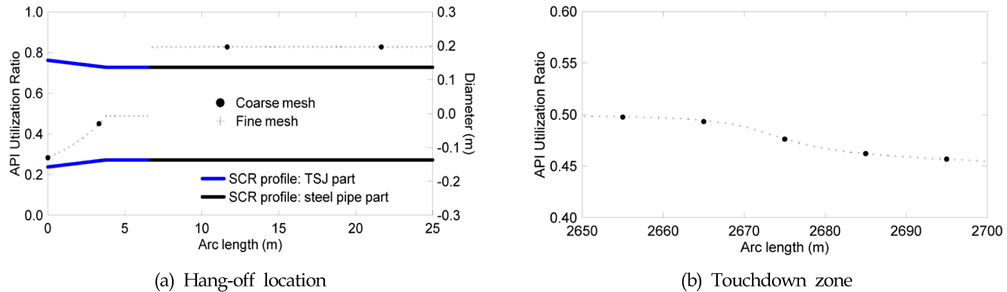
일반적으로 유한요소해석에서 메쉬크기가 작을수록 정확도가 향상되나 해석시간이 많이 소요된다. 특히 SCR 설계를 위한 해석은 Table 6과 같이 다양한 하중조합에 대해 해석을 수행해야 하기 때문에 허용되는 정확도 내에서 메쉬크기를 가능한 한 크게 해야 한다. Fig. 6은 메쉬크기에 따른 10인치 SCR의 응력을 나타낸 것이다. Coarse mesh는 SCR을 10m 간격으로 모델링했으며, fine mesh는 일반적으로 추천되는 메쉬크기(TSJ 0.015m ~ 0.030m, TDP 0.030m ~ 0.090m, mesh size ratio < 1:2)로 모델링하였다 (POSTECH, 2012). 이때 API UR은 SCR에 발생하는 응력과 API 허용응력 비를 나타낸다. TSJ는 티타늄으로 제작되기 때문에 그림에서 보듯이 일반 SCR 구간에 비해 응력비가 현저히 낮은 것을 알 수 있다. 메쉬크기가 작은 경우 Fig. 6(a)와 같이 이러한 재료의 차이로 인한 응력의 변화구간을 정확히 모사할 수 있다. TDZ의 경우 Fig. 6(b)와 같이 이러한 재료의 차이가 없기 때문에 메쉬크기에 따라 큰 차이를 보이지 않는 것을 알 수 있다. 최대 API UR 값은 메쉬크기가 작은 경우 0.829 이며 메쉬크기가 큰 경우 0.828로서 약 0.12%의 오차를 나타낸다. 따라서, 설계관점에서 중요한 최대응력 값의 변화가 크지 않기 때문에 해석의 효율성을 위해 본 논문에서는 TSJ는 0.5m 간격, TSJ에 연결되는 SCR 길이중 최초 1m는 0.5m 간격, 나머지 SCR 구간은 10m 간격으로 모델링 하였다.
(2) 적분시간 영향
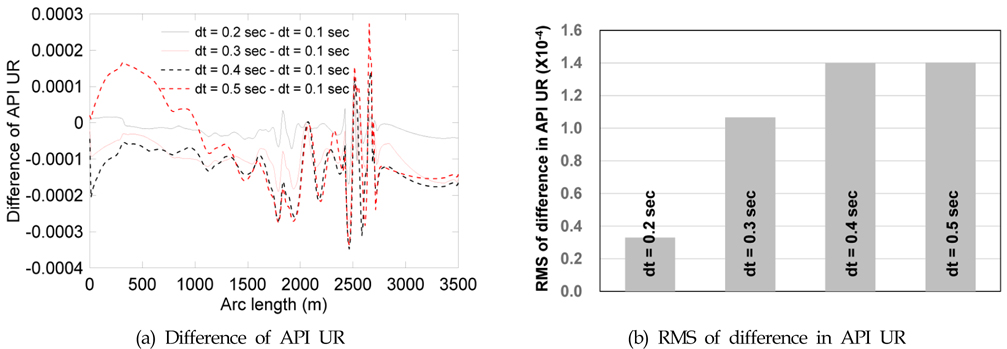
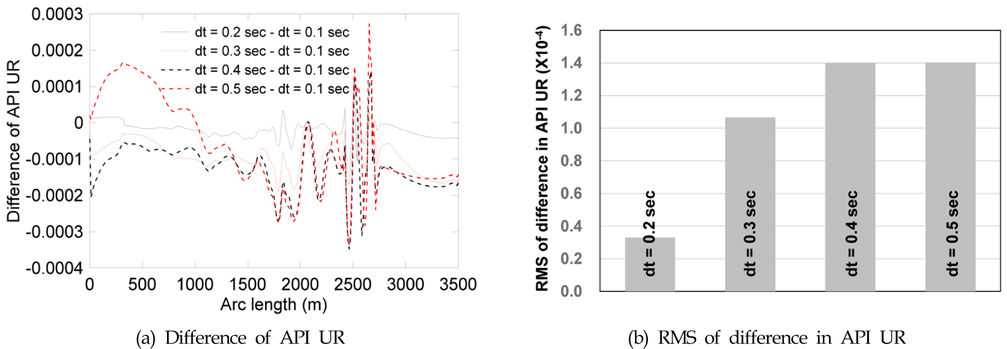
SCR 해석은 비선형 시간이력 해석을 수행해야 하기 때문에 수치적분의 적분시간은 전체 해석시간에 영향을 미친다. 따라서, 해석결과에 영향이 없는 범위내에서 적분시간을 크게 하는 것이 해석 효율성을 증가 시킬수 있다. Fig. 7(a)는 적분시간 0.1초를 기준으로 API UR 값의 차이를 나타낸 것이다. 그림에서 보듯이 적분시간이 증가할수록 오차가 커지며 적분시간이 0.3초 이상인 경우 적분시간 0.1초와 비교할 때 계산되는 응력이 작은 것을 알 수 있다. 특히 TDZ 부근(Arc length 2,500m 부근)에서는 해저면과의 접촉에 의해 비선형 거동이 발생하기 때문에 오차가 다른 구간에 비해 큰 것을 알 수 있다. 하지만 Fig. 7의 적분시간에 따른 API UR 차이, RMS(Root mean square) 값의 차이 및 해석의 효율성을 고려해 본 논문에서는 0.2초의 적분시간을 사용하였다. 또한 강도해석의 총해석시간은 일반적으로 SCR의 응력이 해석 초반부에 나타나기 때문에 특정시간 보다 크게 할 경우 영향이 없다. 본 논문에서는 0.5, 1, 2, 3, 30 시간의 해석시간을 고려한 결과 0.5시간 이후 SCR의 최대응력이 동일하게 나타났기 때문에 해석의 효율성을 위해 0.5시간의 총 해석시간을 사용하였다.
(3) 환경하중 정적해석 결과
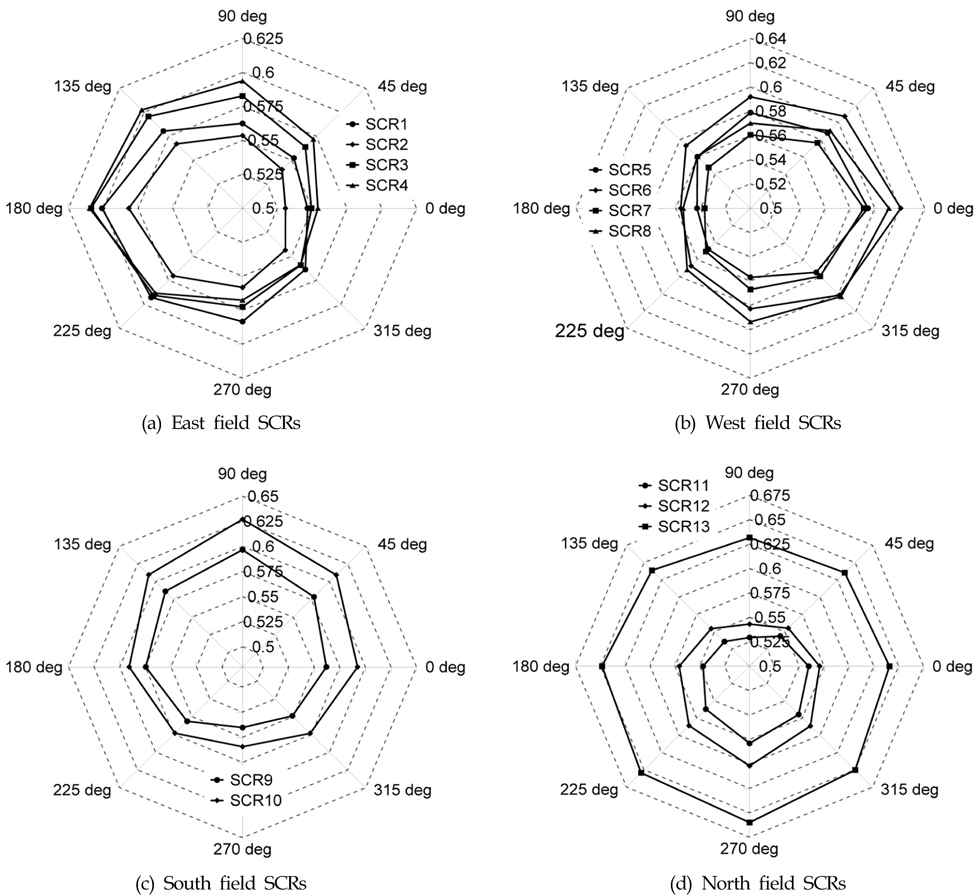
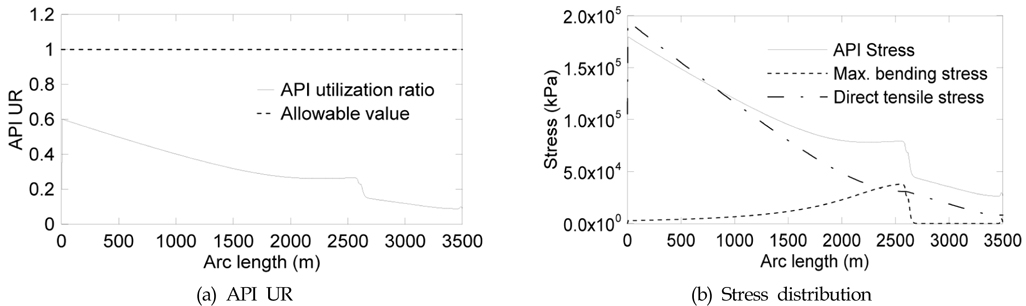
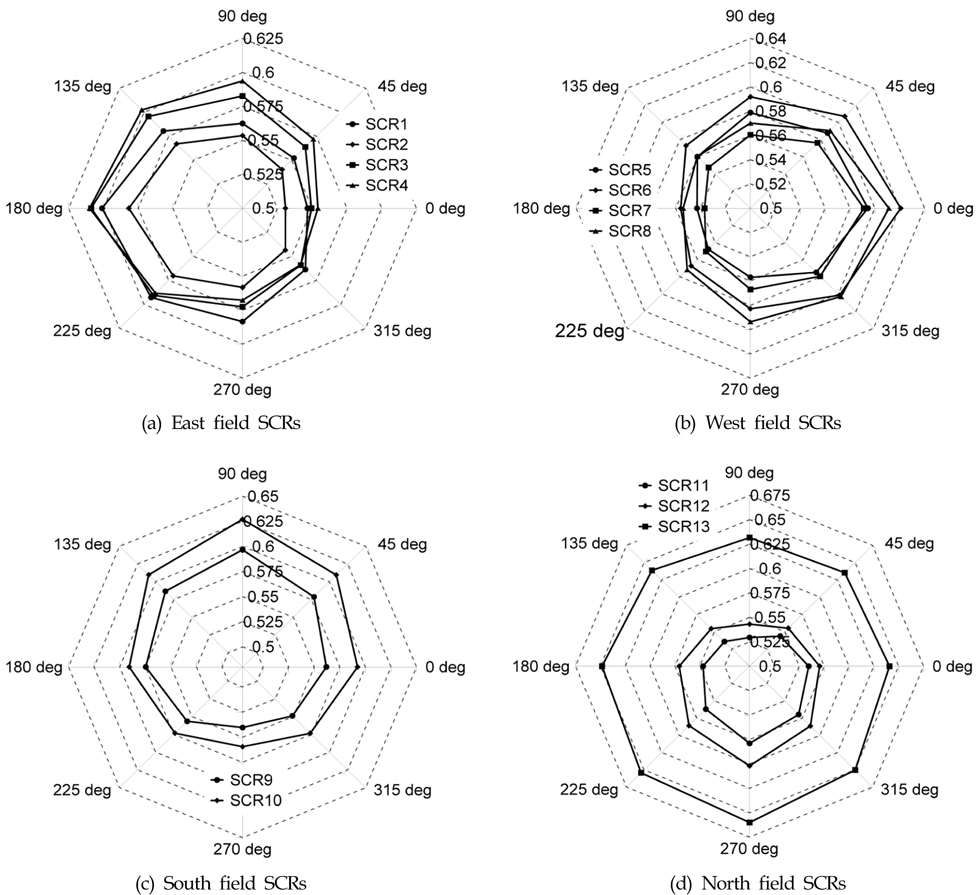
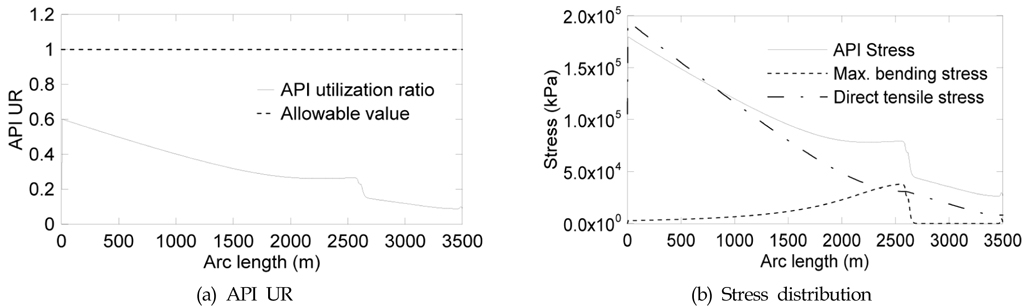
본 논문에서 고려된 모든 SCR은 환경하중 정적해석 결과 Fig. 8과 같이 허용응력을 만족하였다(API UR < 1.0). 그림에서 보듯이 SCR의 최대응력은 하중방향이 180도 일 때 발생한다. 그러나, SCR13의 경우 직경이 생산 라이저의 2배이기 때문에 상대적으로 큰 응력이 발생해 응력값의 비(API UR)는 상대적으로 작게 나타난다. 또한, 최대응력은 Fig. 9(a)에서 보듯이 플랫폼과의 연결부에서 발생하고 Fig. 9(b)에서 보듯이 해저 접촉면을 제외한 구간에서 인장응력이 전체응력을 지배하는 것을 알 수 있다.
(4) 환경하중 동적해석 결과
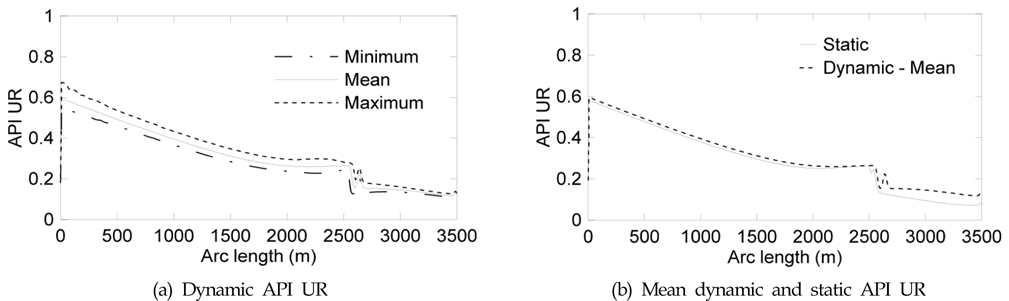
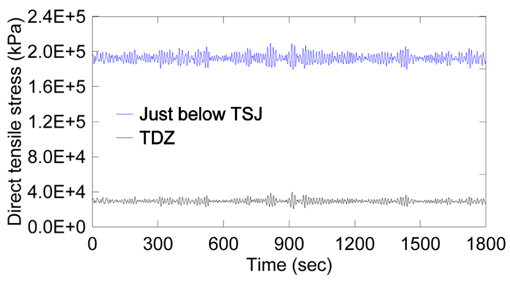
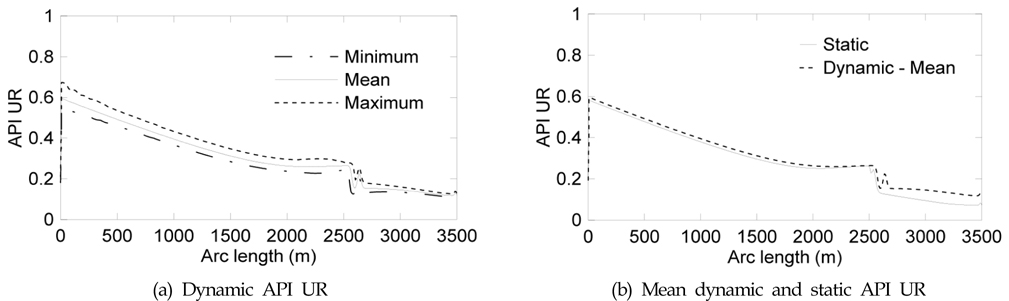
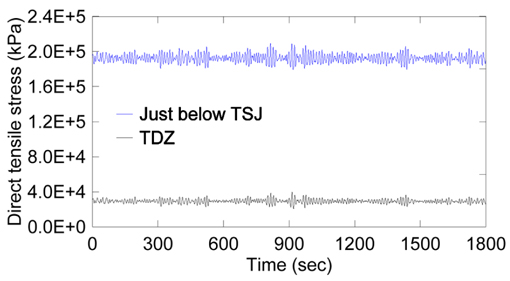
일반적으로 동적응력은 시간이력을 가지기 때문에 Fig. 10(a)에서 보듯이 평균응력을 기준으로 하한값과 상한값을 가지게 된다. 또한 동적응력의 평균값은 Fig. 10(b)와 같이 정적해석결과와 유사한 값을 나타낸다. 이는 플랫폼이 정적하중하에서 변동된 위치에서 동적으로 거동하기 때문이다. Fig. 11은 정적해석 및 동적해석에서 큰 응력을 나타낸 TSJ 하단부와 TDZ의 인장응력 시간이력 곡선을 나타낸 것이다. 그림에서 보듯이 응력값의 차이는 있으나, 사긴이력 곡선의 경향이 하중에 대응하여 유사하게 나타나는 것을 알 수 있다.
[Fig. 11] Time history of direct tensil stress of SCR1 under operating and 180 deg loading direction
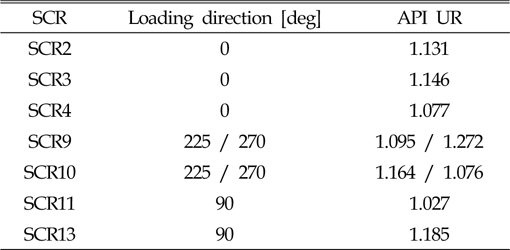
동적해석 결과 Table 8과 같이 생존하중하에서 SCR의 응력이 허용응력을 초과하는 경우(API UR > 1.0)가 발생했으며, SCR9의 응력 시간이력 곡선을 바탕으로 상세분석을 진행하였다.
[Table 8] SCRs with exessive stress under wave dominant survival loading condition
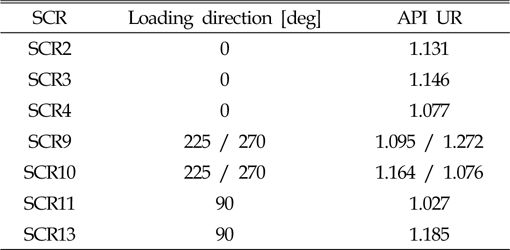
SCRs with exessive stress under wave dominant survival loading condition
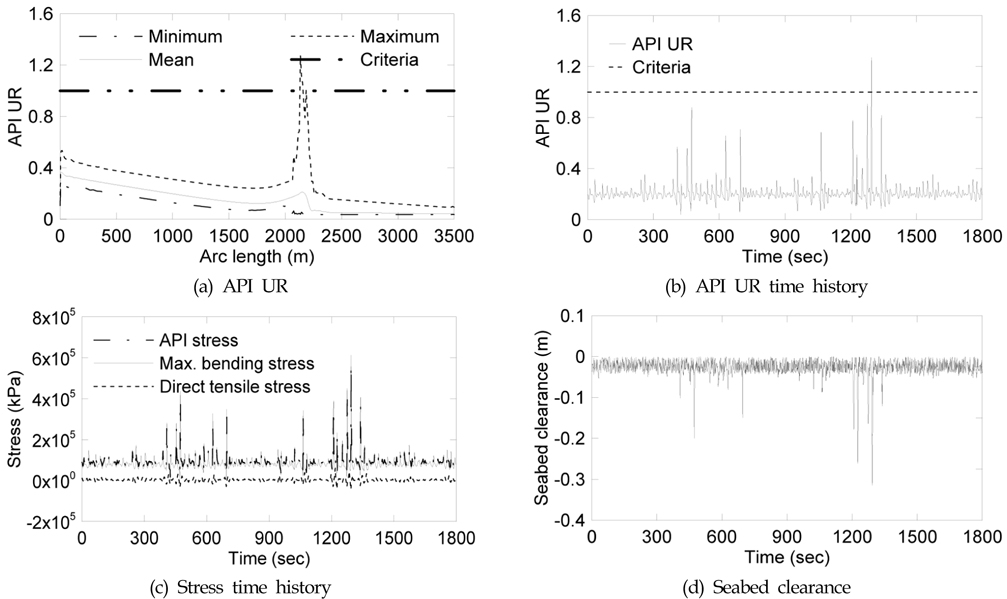
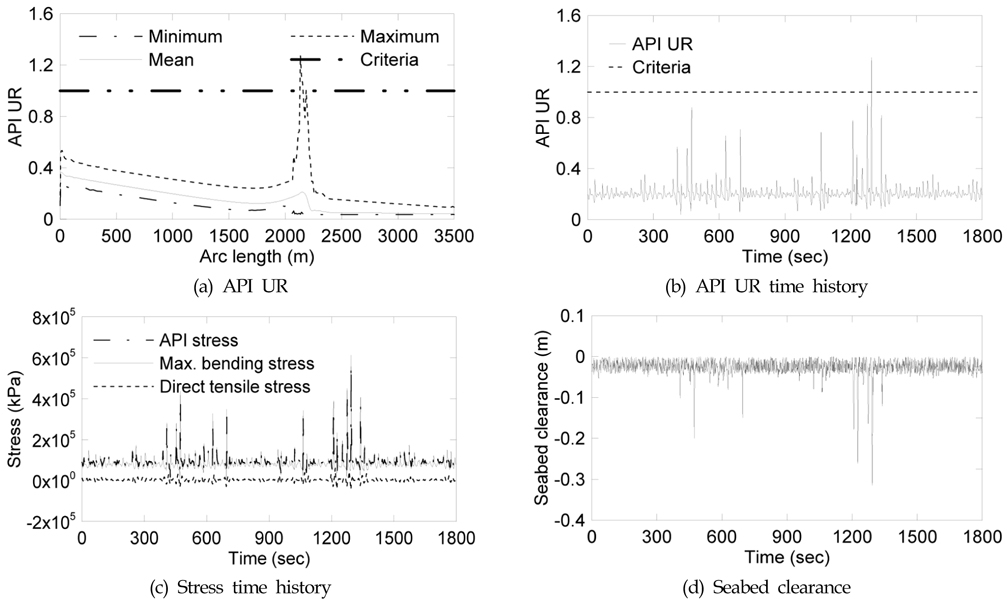
Fig. 12는 허용응력을 초과하는 경우 중 270도 하중방향에 대한 SCR9의 응력 시간이력곡선을 나타낸 것이다. Fig. 12(a)에서 보듯이 SCR 응력의 최대값이 평균값이나 최소값에 비해 TDZ에서 크게 나타나는 것을 알 수 있다. 또한 Fig. 12(b)와 같이 최대응력이 동적해석 시간 전체에 걸쳐 나타나기 보다는 특정 시간구간에서 나타나며 최대응력은 Fig. 12(c)와 같이 인장응력보다는 TDZ에서의 휨응력으로부터 유발되기 때문에 정적해석의 결과와 다르게 TDZ에서 SCR 최대응력이 나타나는 것을 알 수 있다. 특정 시간구간에서 TDZ에 큰 응력이 발생하는 것은 Fig. 12(d)의 TDP와 해저면과의 간격을 통해서도 재확인할 수 있다. SCR의 발생응력이 허용응력을 초과하는 경우 기본적으로 SCR을 재설계(설치각도, 두께, 재료 등) 해야 한다. 재설계 여부를 확정하기 위해서는 변형을 고려한 구조물의 정밀한 재료 동특성을 추가로 고려해야 한다. 이에 대한 상세 평가는 본 논문의 범위에 벗어나기 때문에 추가적인 재설계 없이 추후 해석을 진행하였다.
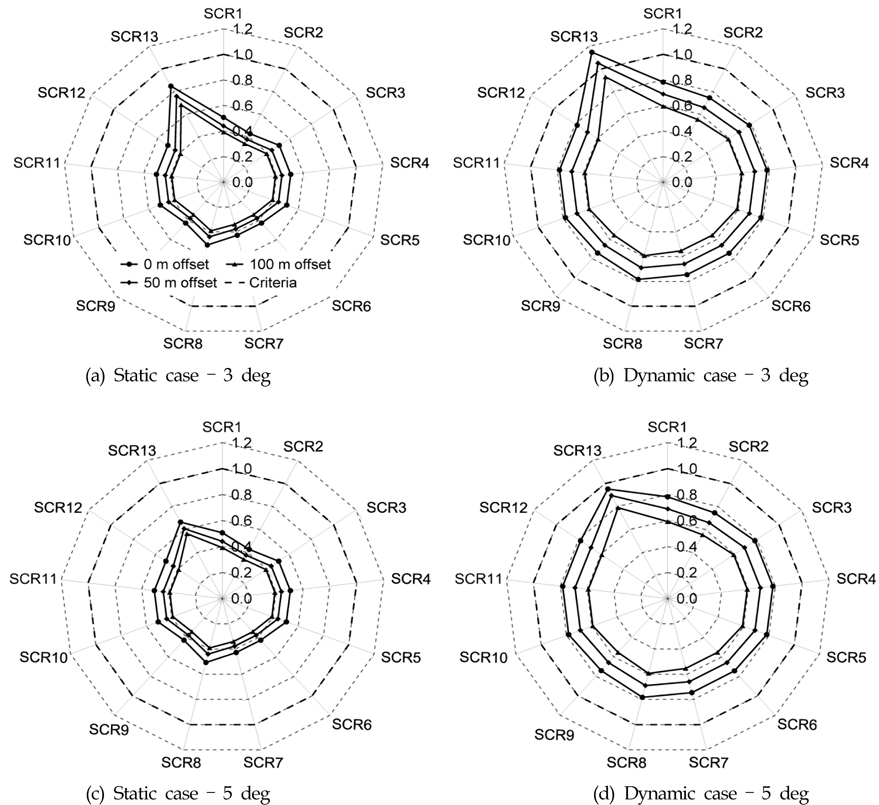
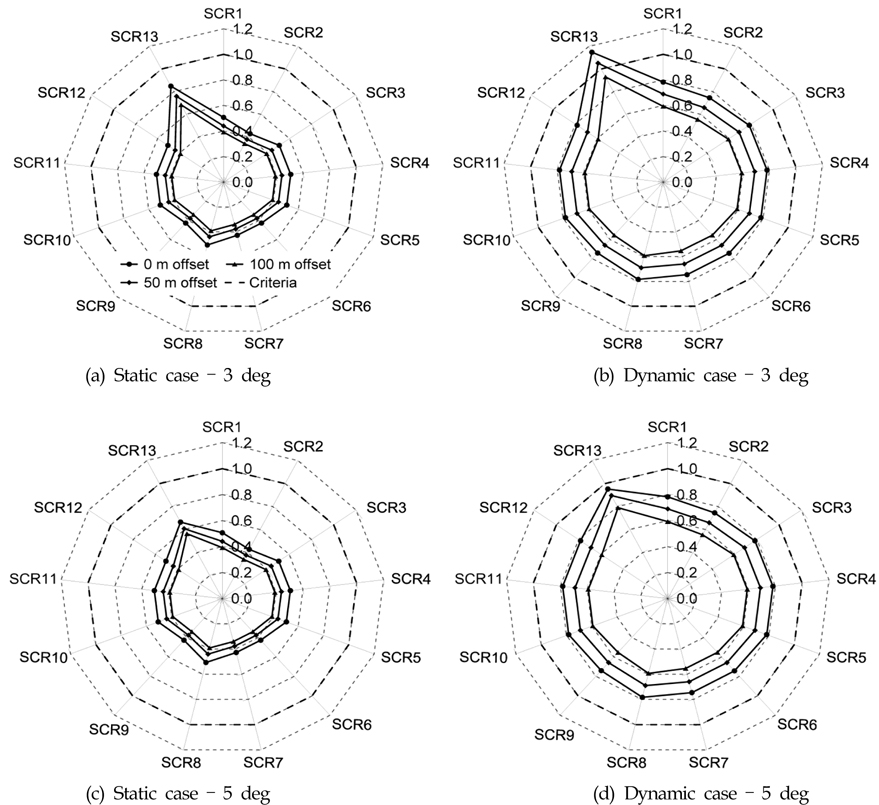
(5) 설치해석 결과
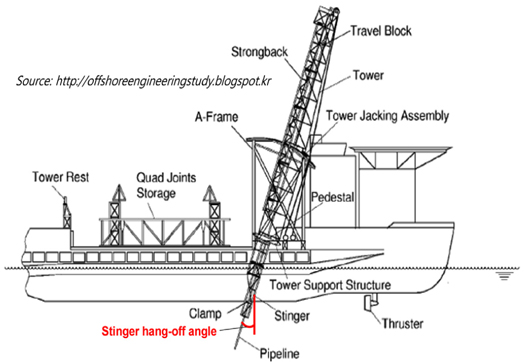
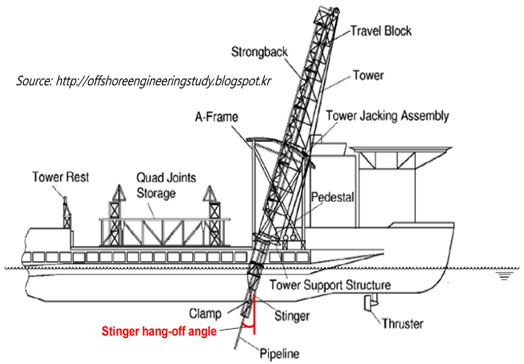
SCR 설치시 응력을 해석하기 위해 McDermott사의 Derrick Barge 50 (McDermott, 2014) 설치선을 고려하였다. 이때 SCR은 J-lay 설치방법을 고려하였으며, Fig. 13과 같이 스팅거의 설치각도(stinger hang-off angle)는 3도로 가정하였다. 또한 보수적인 해석으로 위해 0, 50, 100m의 정적 오프셋을 고려하였다. 해석결과 Fig. 14(a)와 같이 오프셋만 고려한 정적상태에서는 SCR의 설치시 응력이 허용범위 이내로 만족하였다. 그러나, Table 6에 제시된 것과 같이 10년 재현주기 파랑하중을 고려한 동적해석시 SCR13의 응력이 Fig. 14(b)와 같이 허용범위를 초과하였다. 이는 SCR13의 직경이 생산 SCR의 직경에 비해 크기 때문에 설치시 많은 응력이 발생하기 때문이다. 이때, 스팅거의 설치각도를 5도로 상향했을경우 Fig. 14(c), (d)와 같이 정적 및 동적해석시 SCR의 응력이 모두 허용범위 이내인 것을 알 수 있다. 따라서, SCR의 설치시간을 줄이기 위해서 SCR13 설치시에만 스팅거 설치각도를 5도로 하고 나머지 SCR 설치시에는 스팅거 설치각도를 3도로 할 수 있다.
(6) 간섭해석 결과
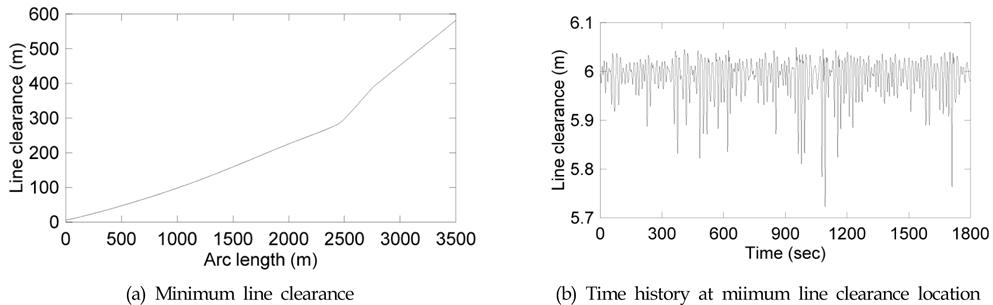
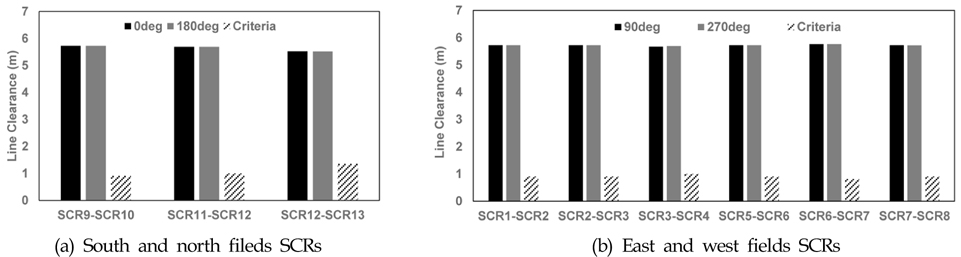
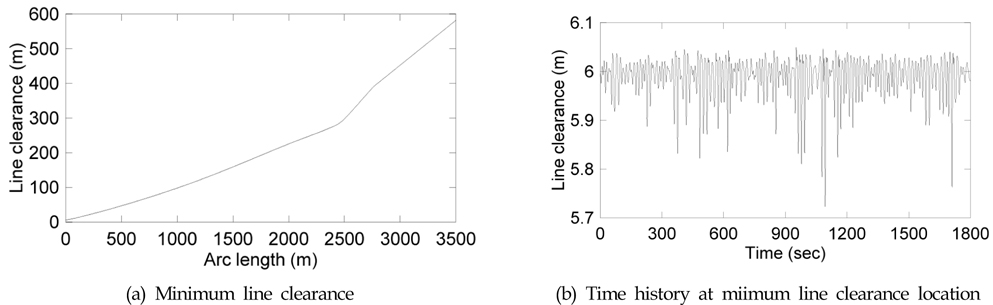
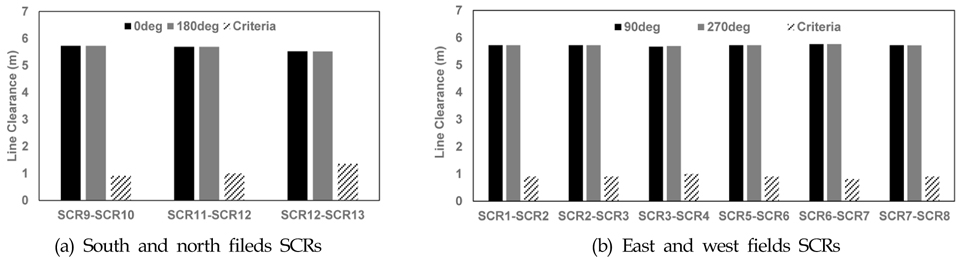
일반적으로 Fig. 15의 예와 같이 SCR 평면과 직각방향으로 플랫폼과 환경하중이 재하되는 방향에 대해 인접한 SCR간 충돌이 발생할 수 있다. 따라서, 플랫폼 좌우(East and west fields)에 설치한 SCR은 90도, 270도 하중방향을 고려했으며, 플랫폼 상하(South and north fields)에 설치된 SCR은 0도, 180도 하중방향을 고려하였다. 조류에 의한 SCR의 후류효과를 고려하기 위해 Huse 모델(Huse, 1993)을 사용하였다. 후류모델은 인접한 SCR의 조류속도, 후류항력, 후류양력을 인접한 SCR의 위치에 따라 결정하게 된다. 일반적으로 SCR 설치간격이 수심이 깊어질수록 벌어지기 때문에 동적해석시 SCR 간격 역시 Fig. 16과 같이 커지게 된다. 따라서, 일반적으로 SCR의 최소간격은 플랫폼과의 연결부 직후에 발생하게 된다. 본 논문에서 고려된 심해 SCR의 경우 Fig. 17과 같이 충분한 SCR 간격을 유지하기 때문에 Table 6에 주어진 긴섭해석 4개의 하중조건하에서 SCR 충돌의 위험성은 매우 작다고 판단된다.
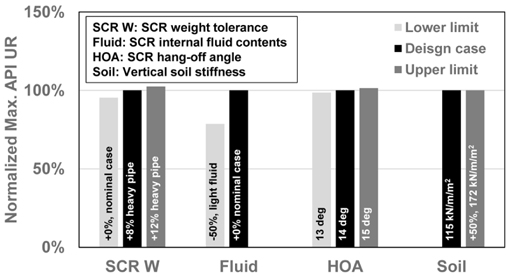
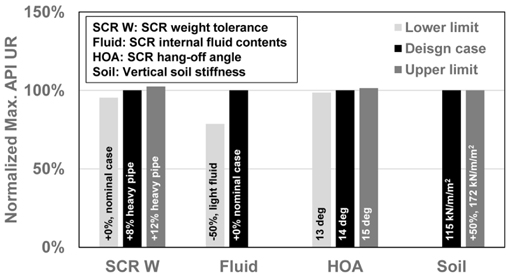
(7) 민감도해석 결과
SCR의 설계변수에 대한 강인성를 분석하기 위해 민감도해석을 수행하였다. 이때 고려된 SCR의 설계변수는 자중과 관련된 강재의 단위중량, 생산가스의 단위중량, 플랫폼과의 연결각도, 지반의 스프링 계수이다. SCR 강도해석시 보수적인 설계를 위햬 강재의 단위중량은 공칭무게 보다 크게(본 논문에서는 8% 증가) 고려한다. 따라서, 햬석시 고려된 강재의 단위중량보다 작은 경우와 큰 경우에 대해 민감도를 확인하기 위해 강재의 단위중량을 공칭무게 및 12% 증가된 무게를 고려하였다. 강재의 단위중량과 유사하게 내부 유체(가스)의 단위중량 역시 해석시 고려된 단위중량 대비 50% 감소된 무게를 고려하였다. 그리고 SCR과 플랫폼의 설치각도에 대한 민감도를 확인하기 위해 설계대비 ±1도의 설치각도를 고려하였다. 마지막으로 단단한 지반에서의 민감도 분석을 위해 설계대비 50% 증가된 지반의 수직강성을 고려하였다. Fig. 18은 동적해석에서 가장 큰 응력을 보인 SCR10의 민감도 해석결과를 나타낸 것이다. 그림에서 보듯이 생산가스의 단위중량을 제외한 설계변수에 대해서는 5% 내외의 응력변화를 나타낸다. 생산가스 단위중량의 경우 SCR전체에 걸쳐 적용되기 때문에 응력감소가 다른 설계변수에 비해 큰 것을 알 수 있다. 민감도해석 결과 일반적으로 SCR 설계변수에 대한 응력의 민감도는 크지 않은 것을 알 수 있다.
본 논문에서는 SCR의 강도해석 및 간섭해석 절차를 소개하고 수치예제를 통해 심해에서의 SCR 거동을 분석하여 다음과 같은 결론을 얻었다.
일반적으로 SCR의 최대응력은 플랫폼과 환경하중이 SCR과 동일평면내에 있으면서 TDP 반대방향으로 하중을 재하하는 방향일 때 발생하며, 최대 API 응력비는 TSJ 직후에 발생한다. 플랫폼과의 연결부에서는 인장응력이 SCR 응력을 지배하나, 해저 접촉면에서는 휨응력이 전체응력을 지배한다. 본 논문에서 고려된 SCR중 일부는 생존하중하에서 허용응력 보다 큰 응력이 발생하였다. 허용응력보다 큰 응력이 발생하였으므로, 재설계 여부를 확정하기 위한 추가적인 정밀해석이 필요하다. 이러한 정밀해석은 변형을 고려한 구조물의 재료 동특성, 허용응력 초과확률, 제작비용, 다른 설계와의 연관성 등을 고려하여 종합적으로 수행해야 한다.
SCR 설치시 스팅거 설치각도가 작을수록 설치기간이 단축되지만 SCR에 큰 응력이 발생하기 때문에 허용응력 범위내에서 스팅거 설치각도를 작게하는 것이 유리하다. 따라서, 적절한 스팅거 설치각도를 고려하기 위해서는 SCR의 특징(직경, 두께 등), 설치해역의 환경 특징, 설치선의 텐셔너 용량 등을 고려하여 설치해석을 수행해야 한다.
본 논문에서 SCR은 플랫폼 연결부에서 6m 간격으로 설치했고, 간섭해석결과 모든 SCR은 허용 최소간격보다 큰 간격을 유지했다.
민감도 해석결과 SCR의 자중이 감소할수록 플랫폼과의 연결부에서 발생하는 인장력이 감소하기 때문에 SCR 응력은 감소했다. 또한, 플랫폼과의 연결각도가 감소할수록 플랫폼과 접촉점 사이의 전체 SCR 길이가 감소하게 된다. 따라서 SCR 자중에 의해 플랫폼 연결부에 작용하는 인장력이 감소하기 때문에 SCR의 응력은 감소하게 된다. 그러나 그 감소량은 자중에 의한 효과보다 작다. 또한, 지반의 스프링 계수는 SCR 최대응력에 미치는 영향이 작은데, 이는 SCR의 최대응력이 해저 접촉면이 아닌 플랫폼과의 연결부에서 발생하기 때문이다.