Lost fishing gears become a major cause of marine pollution, and many policy and technical efforts have been conducted for that. For efficient retrieving lost fishing gears in underwater, It is important to know the current position. Using GPS in the sub-sea environment is impossible and localization requires the use of special systems, and mobility due to water currents for underwater localization also has to be considered. In this paper, described with respect to the system for a self-generated location informations without using an external signal, such as a GPS and Sonar and storing them. Using the characteristics of the geomagnetic and INS principle, proposed informations and a way for estimating self position during movement. Embedded based system suggested and implemented in this study is tested for validating it’s functionality.
국내 연근해에서 사용되는 일부 어구의 유실 비율이 전체 사용량의 약 20%에 달하는 것으로 추정되고 있으며(자망 어구 연간 유실 : 약 500톤, 통발어구 연간 유실 : 약 800만개, 2002년 현장 실태조사), UN의 『책임있는 수산업 규범』에 따라 어업자원의 보호뿐만 아니라 환경훼손을 줄이기 위한 노력이 필요하다[1]. 또한 폐어구가 바다 환경의 오염원의 하나가 될 수 있으며 이에 따라 폐어구의 처리에 대한 대책이 필요하다. 폐어구가 발생하는 원인은 감시·감독 때문에 어업자가 불법적 어구를 바다에 내버리는 경우가 있고 악천 후 등 어려운 조업상황에서 어구를 바다에 무단 방치하거나 투기하면서 발생한다. 또 쓸모없게 된 어구를 육상에 버리는 것보다 해상에 폐기하는 것이 경제적이라고 판단해 버리기도 하고 육상에 폐어구 처리시설이 없거나 접근이 어려운 등의 이유로 폐기한다. 바다에 버려진 폐어구가 어업자원에 미치는 부정적인 영향 중 대표적인 것이 유령어업(ghost fishing)이다. 유실된 어구에 걸려 죽어가는 고기들은 또 다른 포식자를 유인하면서 이들 또한 그물에 걸려죽게 하는 연쇄반응을 야기한다. 폐어구의 재질의 따라 어류 이외에 해양생물에게도 부정적 영향을 미칠 수 있다.
폐어구에 대한 처리는 크게 예방조치와 경감조치, 치료조치로 구분될 수 있으며, 예방조치는 환경에서 폐어구가 발생하는 것을 사전에 예방하는 것으로 어구표시, 어구손실을 줄이거나 어구위치를 파악할 수 있는 탑재기술의 사용, 항구 수집시설의 제공 등이 필요하다. 폐어구를 환경으로부터 제거하는 수단인 치료조치는 싸이드 스캔소나를 사용하거나 유실된 어구 보고시스템, 어구 수거 프로그램, 수거 폐어구의 처리 및 재활용 기술 등의 활용이다. 폐어구의 부정적 영향을 감소시키는 경감조치는 어업비용 증가 및 어구의 효과 저하, 어구 가격 상승을 유발할 수 있어 그 적용 및 범위가 제한적이다.
본 연구는 폐어구에 대한 치료조치에 대하여 어구 사용을 관리하고 수중으로 유실되는 어구를 수거할 수 있도록 어구의 위치를 제공하는 기술개발에 관한 것이다. 일반적으로 어구가 유실되는 되는 위치를 알 수 있는 경우도 있지만 설치된 어구가 여러 가지 이유로 분실 되거나 유실될 경우에는 그 정확한 위치를 알기 어렵다. 또한 수중에서는 해류가 존재하므로 이로 인한 이동이 있을 경우 정확한 위치를 추정하기 어렵다. 이러한 문제에 대하여 수중 이동체에 대한 위치추정이 가능한 기술이 개발된다면 이러한 기술을 이용하여 수중에서 이동하는 동안 위치정보를 저장해두고 어구이동이 정지 되었다고 판단되면 정보저장매체를 수면위로 부상시켜 이를 수거토록 하고 저장된 위치정보를 처리하여 유실된 어구의 최종 위치를 추적하여 수거작업에 활용할 수 있다.
본 논문은 해상에서 사용되는 어구 등이 해상에서 유실되었을 경우 위치를 추적하여 수중에서 오염원이 되는 것을 방지하기 위한 방법에 관한 것이다. 타당한 연구개발을 위하여 다음과 같은 사항을 전재로 한다.
1) 이동성 : 수중에는 조류가 존재하고 이로 인하여 유실되는 물체는 수중에서 이동성을 갖는다.2) 자체위치정보생성 : 초음파 또는 전자파 소스 등 외부 신호원을 이용하지 않고 자체 시스템만으로 정보를 획득한다.
1)의 조건은 실제 해양에서의 조건을 고려한 것이며, 2)의 경우는 제작비용 및 운용의 경제성을 고려한 것이다.
논문의 구성은 다음과 같다. 2장에서는 관련 연구에 대하여 소개하고, 3장에서는 제안하는 시스템에 대하여 설명한다. 4장에서는 제작물과 및 운영 성능평가를 기술하고 5장에서 결론을 맺는다.
자신의 위치를 추정방법은 다양하게 연구되어 왔다. GPS는 가장 일반적인 방식으로 스마트폰, 카 네비게이션 등에 장착되어 활용되고 있다. GPS신호가 없는 건물 내부에서의 위치추정기법으로 WPS(Wifi Positioning System) 방식이 있다. WPS은 와이파이 AP(Access Point)에서 방사된 RF 신호의 파라미터 (MAC 주소, 신호세기 등)를 단말기에서 수신하여 단말과 시스템 간 위치측위 결정기술을 사용하여 이용자의 위치를 계산하여 제공해 주는 기술이다[2].
수중과 같이 GPS를 이용할 수 없는 환경에서 자신의 위치를 추정하는 방법은 방향정보의 사용여부에 따라 Range-based 방법과 Range-free 방법으로 분류할 수 있다[3]. 거리 또는 방향정보를 사용하는 Range-based 방법에는 자신의 위치를 알고 있는 다수의 참조노드를 이용해 거리를 추정하는 Infrastructurebased 방식이 있으며 ToA(Time of Arrival), TDoA(Time Difference of Arrival), AoA(Angle of Arrival), RSSI(Reference Signal Strength Indicator) 계측방법들이 대표적 방법이다. Range-free 방법은 자체 소나와 같은 신호를 이용하여 반사되는 신호에 대하여 도플러효과 등의 이론에 의한 신호를 처리하여 자신의 위치를 추정하는 방법으로 실제 정확한 위치추정에 한계가 있다. 그 외 SBL(short baseline system), USBL(ultra short baseline system), LBM(long baseline system) 등의 상업적 위치 추정시스템이 있으나 이들은 정밀한 위치정보를 실시간으로 제공해주기 위하여 이동환경에 부가의 시스템설치가 필요하며 따라서 고가의 비용이 요구된다. 본 연구에서 제안하는 방법은 Range-free 방법에 속하나 저비용을 고려하여 소나와 같은 외부신호를 이용하는 방식은 배재한다.
상품화된 삼영ENC의 “어망전자부이” 경우, 무선의 송신기와 수신기로 구성되어 송신기가 어구 중에서 수면위의 부표에 장착되어 GPS 신호를 이용하여 위치정보를 선박의 수신기에게 알려주는 시스템이다[4]. 이 제품의 경우에는 실시간으로 정확한 어구의 위치를 알려주는 장점이 있으나, 어구가 수중으로 유실 될 경우 유실되는 시점까지의 위치정보는 알 수 있으나, 수중에서 이동을 하게 되면 정확한 위치를 추정하기 어렵다. 또한 특허출원중인 “Ip-rfid를 이용한 유실 어구 위치 확인 시스템, 장치 및 방법”에 의하면 어구와 해당시스템이 와이어로 연결되어 수중으로 유실되면 특정장치에 의하여 해당시스템이 수면위로 부상되며 이때 무선 IP 통신을 이용한 위치정보 알림 서비스를 수행함으로서 실시간 원격 유실어구 확인 효과를 기대한다[5]. 그러나 이 시스템의 경우 수중에서 물체가 해류 등에 의하여 와이이어 길이 이상으로 이동하거나 IP 통신 서비스 지역 외에서는 활용할 수 없는 단점이 있다.
본 연구에서 개발하고자 하는 시스템의 적용환경은 바다 또는 강과 같은 수중으로서 다음과 같은 환경적 특성을 갖는다.
– GPS 및 Wi-Fi 등 무선 전파 수신불가– 이동체에 대하여 상대속도를 고려해야하는 조류 등이 존재
이상과 같이 GPS신호나 와이파이 신호가 없는 경우에는 추측항법(Dead Reckoning)기술을 이용할 수 있다. 추측항법은 움직이는 대상물에 외부의 도움 없이 자신의 방향각과 속도, 시간을 관측할 수 있는 관성항법장치(Inertial Navigation System)를 장착하여 이전의 위치정보를 바탕으로 현재의 위치를 관측하는 방법이다. 관성항법장치와 같은 위치측정 장비를 갖는다 할지라도 바람, 조류 등 외부환경의 이동 즉, 상대속도에 의하여 발생되는 실제 위치와의 오차를 보상해야 정확한 위치를 계산할 수 있다. 항공기나 잠수함의 경우 외부에 유체의 속도를 알 수 있도록 별도의 계측기 사용하거나 GPS신호를 이용한다. 어구 등과 같은 경우, 수중에서는 GPS신호를 이용할 수 없으며 위치정보를 위하여 별도의 유체계측 장비를 사용하는 것은 비경제적인 방법이므로 새로운 방안이 필요하다.
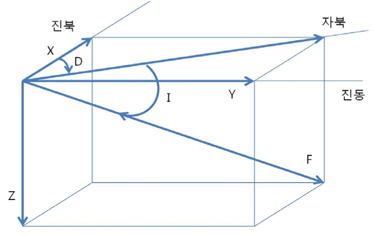
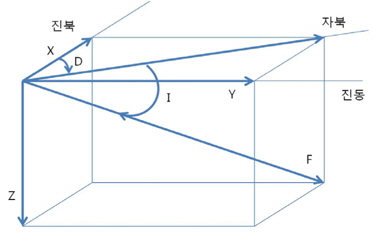
지자기(地磁氣)라고도 불리는 지구자기장은 지구가 방출하는 자기장으로 세기는 위치에 따라 약 25~65 마이크로테슬라 (=250~650 밀리가우스) 정도이다. 미국의 NGA(National Geospatial-Intelligence Agency)와 영국의 DGC(Defence Geographic Centre) 공동 개발한 WMM(World Magnetic Model )은 전세계 자기장모델을 지도로 제공하고 있다[6]. 여기서는 위도, 경도, 고도의 정보를 입력하면 그 위치에서의 각종 지자기 데이터를 제공하고 프로그램을 제공하고 있으며, 이를 이용한 지도정보를 제공하고 있다. 제공하는 7가지 지자기 정보로서는
F - Total Intensity of the geomagnetic field,H - Horizontal Intensity of the geomagnetic field,X - North Component of the geomagnetic field,Y - East Component of the geomagnetic field,Z - Vertical Component of the geomagnetic field,I (DIP) - Geomagnetic Inclination,D (DEC) - Geomagnetic Declination (Magnetic Variation), 이며 이들의 관계는 그림 1과 같다.
특정지역의 지자계분포에 대한 정보가 있을 경우 특정위치에서의 3축에 대한 지자계값을 안다면 지자계분포도에서 정확한 위치의 추정이 가능하다.
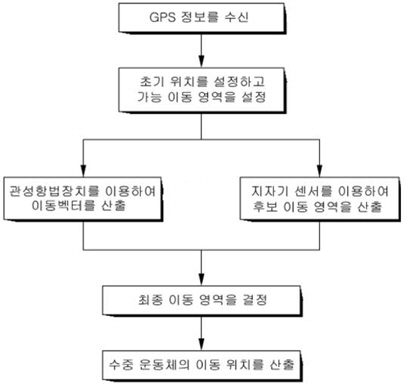
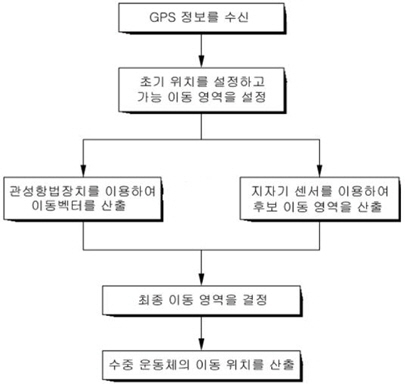
“지자기맵 정보를 이용하여 수중 운동체의 위치를 결정하기 위한 장치 및 그 방법”에 관한 특허 정보에 의하면 관성항법장치로부터 이동벡터를 산출한 후 지자기센서를 이용하여 후보이동영역 및 이동 위치를 결정하는 방법을 소개하고 있다[7]. 그림 2는 그 과정을 설명하고 있다.
[7]에 의하면 관성항법 장치에서의 이동벡터 산출정보와 지자기센서의 정보를 이용하면 수중 운동체의 이동위치를 산출할 수 있다.
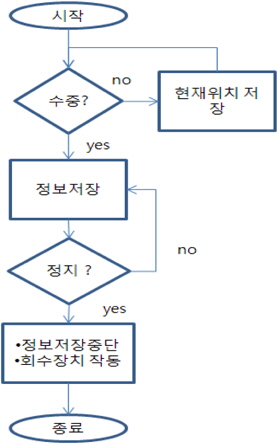
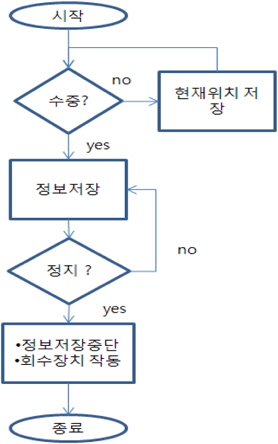
그림 3은 어구 이용 중 해상에서 유실되는 사항을 가정하여 필요한 정보를 수집하는 절차를 나타내는 시나리오이다. 그림 3에서, 시스템의 운용초기에는 수면위에 존재하여 GPS신호를 정상적으로 수신할 수 있으므로 이를 이용하여 이동체의 수중으로 이동 직전까지의 초기위치 정보를 확보한다. 이동체가 수중으로 이동했다고 판단되면(예 : GPS신호 OFF) 정보를 저장하기 시작한다. 이동체가 이동을 하지 않으면(예 : 임계치 이내 동일한 정보 반복) 특정 위치에 안착했다고 판단하고 정보저장을 중단한 후 전체 시스템 또는 저장매체를 수면위로 방출한다.
수중에서 이동하는 위치의 추적과 최종 위치 추정을 위하여 필요로 하는 정보는 다음과 같다.
1) 수중으로 유실 직전의 초기 위치 : GPS 신호2) 수중에서의 이동 경로 추적 및 최종 위치 추정 : 3차원 자이로 값과 가속도 값과 3차원 지자기 값
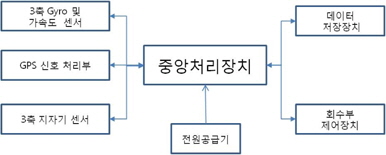
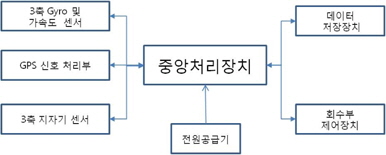
수중 이동체 위치추정을 위한 필요정보는 3차원 지자기 정보, 자이로정보, 각속도 정보이며 초기 위치를 확보하기 위한 GPS 정보도 추가로 요구된다. 이러한 정보를 독자적으로 확보하여 저장하는 시스템을 블록다이어그램으로 나타내면 그림 4와 같다.
중앙처리 장치는 GPS신호처리부, 3축 Gyro 및 가속도센서, 3축 지자기센서로부터 데이터를 수신하여 이를 자체 시간정보와 함께 동기를 맞추어 데이터 저장장치에 기록하는 기능을 한다. 전원공급기는 각 장치에 안정적인 전원을 제공하며, 회수부 제어장치는 전체 시스템을 수중에서 수면위로 부상시키는 장치를 작동하는 역할을 한다.
제안하는 시스템의 구현을 위하여 아두이노 보드를 이용하였다. 아두이노 보드는 자신의 아이디어를 빠른 시간에 간편하게 직접 제작하여 결과를 볼 수 있는 도구로서 아두이노 마더보더 자체는 AVR 계열의 원 칩 콘트롤러, USB 통신/전원 포트, 각종 LED 및 입출력 핀을 제공하여 외부 장치와 연결하여 사용할 수 있는 표준화된 인터페이스를 제공하고 있다. 또한 아두이노는 표준화된 입출력 포트를 통하여 각종 LCD, KEYPAD, 온도/습도 센서 등 다양한 주변장치를 지원하는 쉴드라는 개념의 입출력보드 및 샘플 프로그램까지 제공하고 있으므로 컴퓨터에 대한 어느 정도의 지식만 있으면 활용할 수 있는 간편한 개발도구이다.
제안하는 시스템 구현에서의 주요 구성품은 다음과 같다.
중앙처리장치 : Atmega328 마이크로 프로세서GPS 신호처리부 : USGlobalSat EM-406A3축 Gyro 및 가속도센서 : MPU-60003축 지자기센서 : HMC5883L데이터 저장장치 : 일반적인 디스크의 FAT16 또는 FAT32을 지원하는 SD 카드(32Gb 삼성 Mini SD)
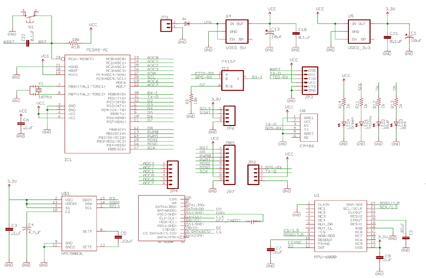
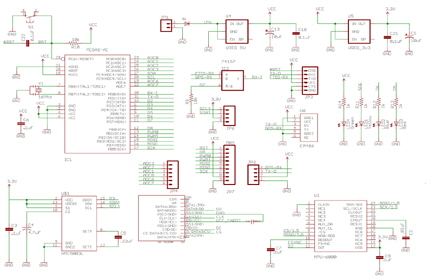
여기서, 회수부 제어장치는 본 시스템이 실제 활용 될 때 필요한 부분으로 본 연구에서는 제작하지 않았고, 전원공급기는 기본적으로 5V DC 전원을 공급토록되어 있으므로 다양한 용량의 건전지 활용이 가능하다. 전체 회로도는 그림 5와 같다.
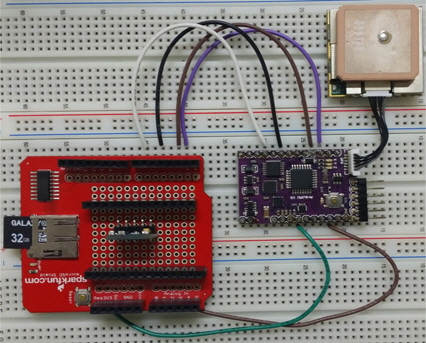
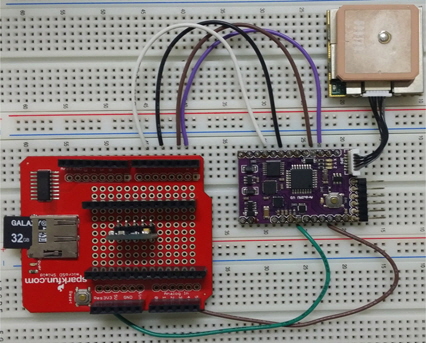
구현한 시스템의 실제 모양을 그림 6에 나타내었다.
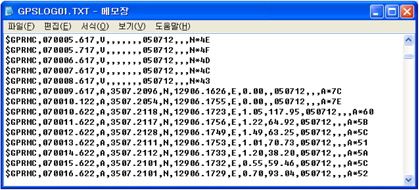
제작한 시스템의 기능 확인을 위하여, 먼저 GPS 신호를 확인하였다. 그림 7은 GPS로부터 초기얼마 이후 부터 정상적으로 데이터를 수신하는 것을 알 수 있다. 참고로 그림 7은 GPRMC 포맷으로, GPRMC 명령어, 위성시간, 수신상태, 위도, 위도방향, 경도, 경도방향, 속도, 방향각, UTC(Universal Time Coordinated)시간, CHECKSUM으로 이루어져 있다.
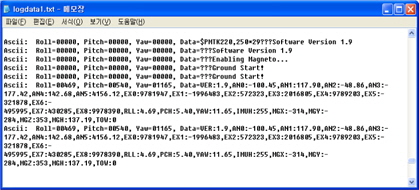
제작된 시스템에서 획득되는 센서 정보값은 총 9가지이다. 즉, x, y, z 3방향에 대한 자이로 값과 가속도 값 6가지와 x, y, z 3방향에 대한 자기장 값 3 가지이다. 정상적인 저장확인 여부를 위하여 SD 카드에 저장된 파일의 내용을 읽은 내용을 그림 8에 나타내었다.
그림 8에서 앞부분은 초기화와 메시지를 출력한 후 일정량의 동일한 패턴의 데이터 출력이 반복되는데 이에 대한 설명은 다음과 같다.
1) Ascii: Roll=00469, Pitch=00540, Yaw=01165, Data =VER:1.9 ⇒ 센자료를 이용하여 계산된 ASCII 코드의 Roll, Pitch, Yaw 값2) AN0 : −100.45, AN1:117.90, AN2:−48.86, AN3 : −177.42 , AN4:142.68, AN5:4156.12 ⇒ AN0 : X축 gyro, AN1 : Y축 gyro, AN2 : Z축 gyro , AN3 : X축 accel ,AN4 : Y축 accel, AN5 ; Z축 accel3) EX0:9781947, EX1:−1996483, EX2:572323, EX3:2016805, EX4:9789203, EX5:−321878, EX6:-495995, EX7:430285, EX8:9978390 ⇒ Roll, Pitch, Yaw 값 계산을 위한 임시 값4) RLL:4.69, PCH:5.40, YAW:11.65 ⇒ 계산된 롤, 피치, 요에 대한 각도(degree) 값5) MGX:−314,MGY:−284,MGZ:353 ⇒ x, y, z 3방향에 대한 자기장 값
그림 8에서 AN0∼AN5값과 MGX, MGY, MGZ에 의하여 9가지의 위치정보가 저장됨을 확인하였다.
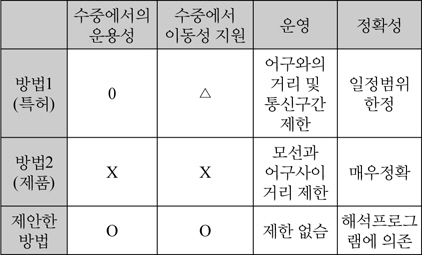
제안한 시스템과 기존의 특허출원 아이디어 및 제품과의 비교를 요약하면 표 1과 같다. 방법 1은 참고문헌 [5]의 방법이고, 방법 2는 참고문헌 [4]의 방법을 지칭토록 한다.
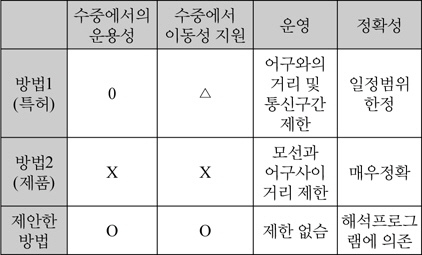
기존의 방법과 제안하는 방법과의 비교
표 1에서, 방법1은 수중에서 운용 가능하며, 시스템과 연결되는 거리이내에서는 가장 확실한 방법이지만, 시스템이 운영되는 지역이 IP통신거리 밖에 있으면 활용이 불가능하다. 방법 2는, 이미 제품화 되어 있어서 운영에서의 안정화는 보장되고 또한 수면 위에서는 가장 정확한 위치정보를 제공하는 장점이 있지만 수중으로 유실되면 그 기능을 상실하는 단점이 있다. 제안하는 방법은, 수상에서는 GPS정보를 충실하게 모니터하고 저장하여 유실 초기에 위치의 초기 값으로 제공하며, 수중으로 유실되는 경우 위치이동 산정에 이용되는 자이로 값과 가속도 값을 저장함과 동시에 유체의 이동에 따른 상대속도 오차를 고려하여 지자기 맵 활용을 위한 3차원 지자기 정보를 지속적으로 저장하여 유실물의 최종 위치까지 안내하는 역할을 함으로서 상대적으로 장점을 갖는다.
본 연구에서는 GPS 또는 소나와 같은 외부의 신호를 활용하지 않고 조류, 해류와 같이 외부 유체에 의하여 발생되는 위치의 상대오차를 고려하여 자신의 위치를 추정할 수 있는 방안을 제안하고 이를 구현하여 결과를 보였다. 제안하는 방법은 해양 오염의 주요 원인이 되는 유실 폐어구를 수거하기 위한 방안을 모색하면서 강구하게 되었다. 기존의 제품화 된 어구 위치 확인 시스템은 수중에 유실되면 기능을 할 수 없고 평소 무선통신을 하는 등 고 기능에 따른 가격문제가 있고, 특허출원된 기존의 관련 아이디어는 유실된 거리 및 이용지역의 한계가 있다.
제안하는 방법은 수중에서의 이동성을 고려하여 항공기나 잠수함에서 사용하는 관성장치 원리에 따라 3축에 대한 자이로 값과 가속도 값을 도출하고 유체흐름에 의한 상대속도오차를 고려할 필요 없이 3축에 대한 지자기 값을 도출하여 시간정보와 함께 저장해두고 필요시 저장된 값을 해석하여 위치를 추정토록 하는 것이다.
이 방법은 상대적으로 저렴하게 제작될 수 있어서 경제적이며, 임베디드 기반으로 운용되는 것이므로 사용에 있어서 지역적이나 거리적으로 제한이 없다. 다만 전원장치에 제한이 있어서 전원이 모두 소모되면 기능이 정지되는 단점이 있다.
본 시스템에 RFID 태그 기능을 추가하여 어구 및 사용 선박 등의 정보를 저장․관리하면 해양오염원을 중앙에서 추적 및 관리한다는 측면에서도 활용가능성이 많다.
향후 연구방향으로는 자이로 및 가속도 센서 정보를 이용한 위치추정 알고리즘의 정확성 향상에 대한 노력과 함께 수중에서의 지자기 맵 구축 관련 연구이다.