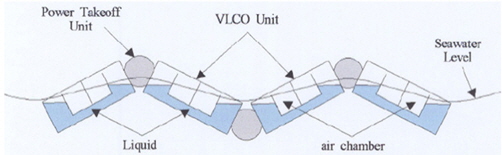
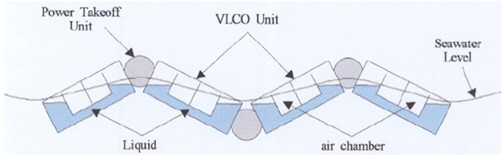
The structure of a variable liquid column oscillator(VLCO) is analogous to that of the tuned liquid column damper used to suppress oscillatory motion in large structures like tall buildings and cargo ships. The VLCO is a system for absorbing the high kinetic energy of the accelerated motions of multiple floating bodies using an air-spring effect produced the installation of inner air chambers. Thus, a VLCO can improve the energy efficiency of the activating object type of wave energy converters made by the Pelamis Company. In this research, an experiment was performed in two cases: with the top valves closed and open. The floating bodies were connected by hinges. The effect of the internal flow was estimated by comparing the results for the closed and open valves.
바다는 지구 표면의 2/3이상을 차지하고 있으며, 무한한 에너지 자원이 존재하고 있다. 해양에서 얻을 수 있는 에너지원으로는 해수면의 높이차를 이용하는 조석에너지, 바람을 이용하는 풍력에너지, 일정한 해수의 유동을 이용하는 해류에너지, 파도가 가지는 운동 및 위치에너지를 이용하는 파랑에너지 등이 있다. 이중 파랑은 모든 해역에 폭넓게 분포하므로 가용에너지원이 풍부하고, 에너지를 회수하기 위한 장치를 설치할 수 있는 해역 또한 광범위하므로 대규모로 활용이 가능한 에너지 자원이다. 이와 같은 파랑에너지를 전기로 변환하는 방식을 파력발전이라 하며, 파력발전시스템은 파랑의 위치에너지와 운동에너지를 1차 변환을 통해 다른 역학적 에너지로 변환시킨 뒤에 2차 변환을 통해 전기에너지로 변환하는 시스템이다. 따라서, 파력발전 시스템은 1차변환장치의 개발이 가장 중요한 분야가 되므로, 파력발전시스템의 개발은 1차 변환 장치 개발의 역사와 함께 하고 있다. 현재 주로 적용되고 있는 1차 변환장치를 에너지 변환 방법에 대하여 분류하면 크게 세가지정도로 분류할 수 있다. 파랑에너지 변환 방식 중 가장 에너지 효율이 높은 파랑의 에너지를 직접 흡수하여 발전에 이용하는 가동물체형, 장치내에 들어온 수주의 왕복운동을 이용하는 진동수주형, 그리고, 밀려오는 파를 수집관에 모아서 유로에 흐름을 만들어, 그 흐름을 이용하는 수류형 및 에너지를 직접 압력과 유량의 형태로 받는 수압면형 등이 있다. 여러 가지 파력발전 방식 중에서 가장 효율이 높은 발전방식인 가동물체형 파력발전시스템에 관한 연구는 현재 유럽국가 및 일본 등의 나라를 중심으로 활발히 진행되고 있다. 가동물체형 파력발전시스템 중에서 상용화된 대표적인 시스템은 영국의 Pelamis사가 개발한 시스템(Pelamis wave power, 2009)이다. 이 시스템은 가장 보편화된 가동물체형 발전시스템이며, 설치장소의 제약이 없는 장점과 유지 보수 비용이 타 장치에 비해 저렴하다는 장점으로 인해 가동물체형 방식 중 가장 뛰어난 성능을 발휘하는 것으로 조사되었다 (Parker et al, 2007). Pelamis사의 발전방식이 가장 보편화되어 있지만 이 방식의 효율은 10% 초반 정도에 불과한 실정이다. 따라서 이 방식의 장점을 살리면서 효율을 높이는 새로운 발전 방식의 개발이 필요하다. 가동물체형 파력발전시스템의 효율을 향상 시킬 수 있는 새로운 발전 방식으로 가변수주진동장치(VLCO, Variable liquid column oscillator)를 적용한 발전시스템이 있다. VLCO는 내부에 공기실을 설치하여 공기스프링 효과를 발생시켜 다수 부유체의 운동을 가속화시킴으로서 이에 따른 높은 운동에너지를 흡수하는 시스템이다. VLCO를 적용한 연구는 VLCO 유닛에 대한 수치적 계산(Yang and Cho, 2009) 및 모델링 제어에 대한 연구(Cho et al., 2011)가 있다.
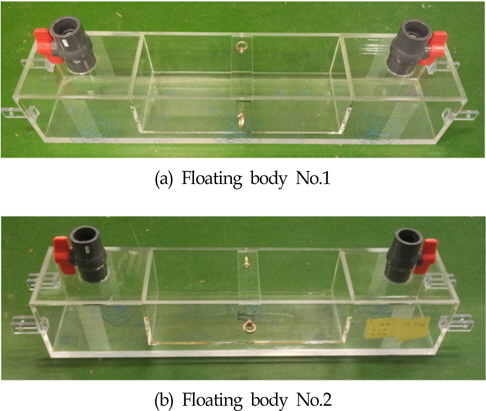
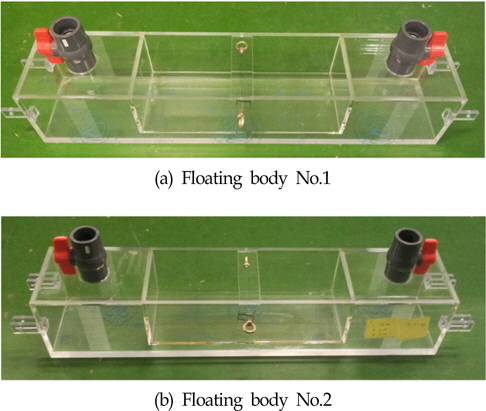
본 연구에서는 Fig. 1에 보여지는 VLCO 유딧을 Pin-joint 연결한 모델에 대해, 모델 상부에 있는 밸브의 개폐여부에 따른 운동특성을 실험을 통해 평가하였다.
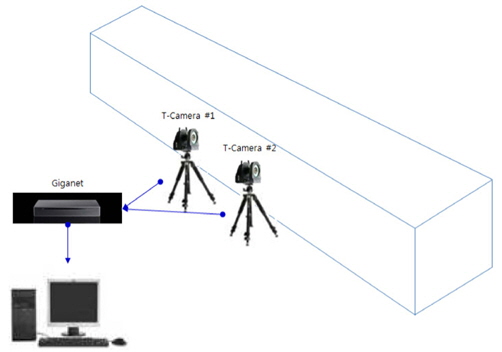
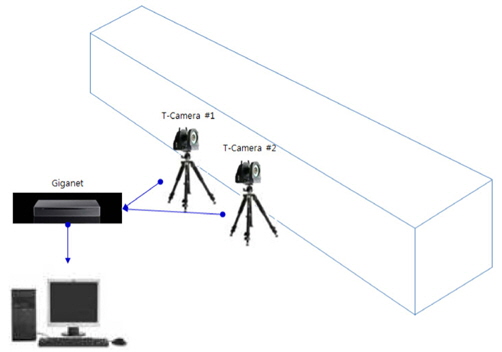
실험은 부경대학교 조파수조(길이 40m, 폭 2.5m, 깊이 1.5m)에서 수심 1.2m로 하여 수행하였다. Fig. 2는 운동응답을 측정하기 위한 모션캡쳐시스템의 개략도를 나타내고 있다.
Table 1과 같이 파고 2cm의 파주기 0.6초에서 1.6초까지 0.05초간격으로 21개의 파에 대해 실험을 행하였다.

Wave conditions
실험은 모델에 적외선 카메라가 인식하도록 Mark를 설치한다. Mark는 파상측과 파하측, 그리고 중앙부에 설치를 하였다. 모델에 설치된 Mark들을 두 대의 카메라가 인식하도록 카메라의 위치를 잡고, 소프트웨어를 통해 카메라에서 인식된 Mark를 확인하고, 해상도를 조절해서 모델이 거동시에도 Mark들을 잘 인식하도록 한다. 카메라의 위치를 잡고 나면, 캘리브레이터를 사용해서, 소프트웨어 상에서 Mark들을 캘리브레이션을 한다. 캘리브레이션이 제대로 완료되었으면, 원점을 지정하여서, 원점과 Mark 사이의 거리를 소프트웨어 상에서 인식시킨다. 인식된 Mark들은 각 Mark들을 프레임으로 연결하여서, 하나의 세그먼트를 만든다.
조파기를 통해 생성된 파에 의해 모델이 운동을 하게 되면, 모든 Mark들의 운동이 카메라를 통해서, 소프트웨어로 인식이 된다. 이 때 Mark들은
Mark들은 카메라가 인식할 수 있도록 Fig. 3과 같이 모델 상부의 파상측에 하나, 중앙부에는 정중앙에 하나, 중앙에서 왼쪽에 하나를 부착하는 것을 기본으로 하여 각 부체마다 Mark를 추가하는 것으로 설치하였다.
운동의 캡쳐는 파가 모델에 도달하기 전에 캡쳐를 시작하여 약 30~40초 정도 후에 캡쳐를 멈추어서, 운동을 평가하였다.
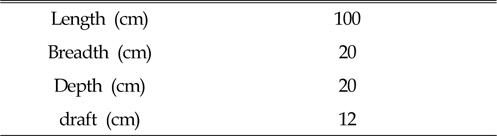
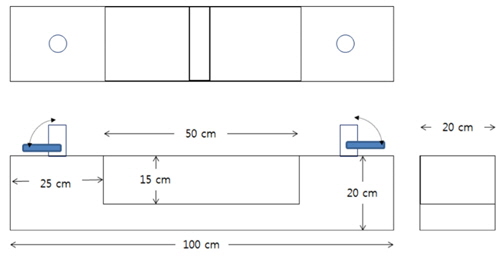
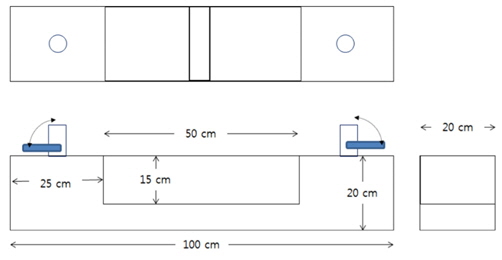
Table 2는 실험에 사용한 모델에 대한 제반사항을 나타내고 있다. Fig.4는 모델 제작에 사용한 삼면도를 보이고 있다. 모델은 두께 1cm의 아크릴판으로 제작을 하였으며, 모델의 하부판만 2cm의 아크릴판으로 제작하였다. 그리고, 각 부유체의 파상측과 파하측에 직경 10cm의 밸브를 설치하였다. 부유체 No. 1, 3은 Fig. 5(a)와 같이 연결부는 凸의 형태로 하고, 부유체 No. 2, 4는 Fig. 5(b)와 같이 凹로 하여서, Fig. 6과 같이 중간에 볼트와 너트를 채워서 연결하였다. 볼트와 너트를 채워서 연결된 부위는 느슨하게 연결되도록 하여서 부유체의 운동에 영향이 없도록 하였다.
[Table 2] Model specifications
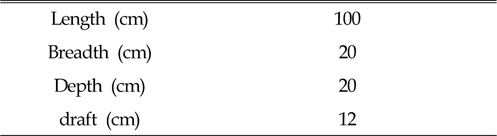
Model specifications
실험은 두 가지 경우에 대해 행하였다. 4개의 부유체를 내부에 물을 채운 뒤 상부의 밸브를 열었을 경우와 밸브를 잠궜을 경우에 대해서 실험을 행하였다.
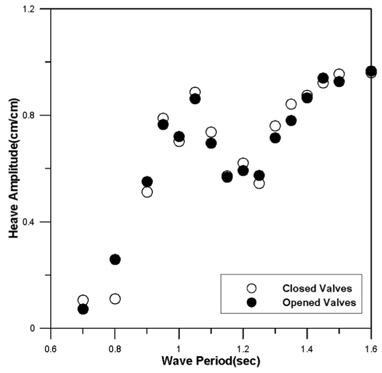
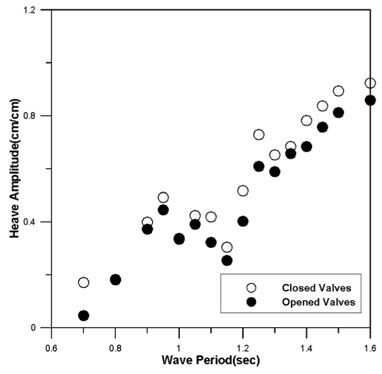
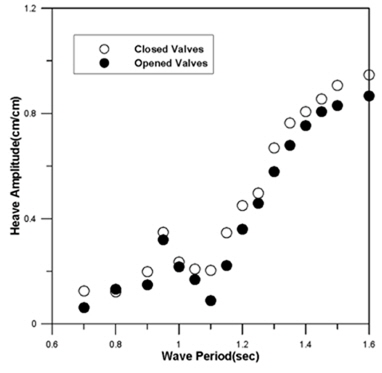
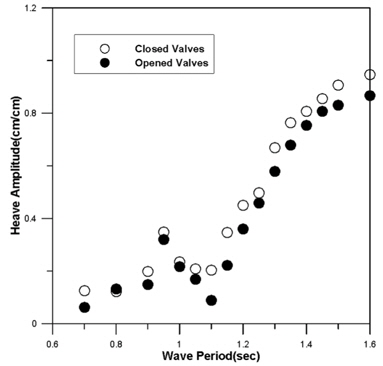
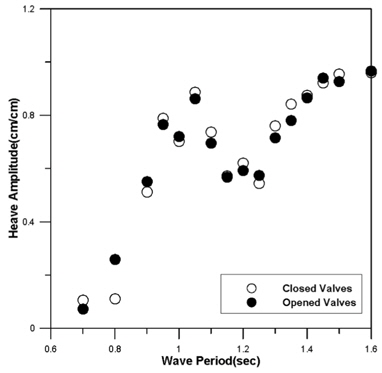
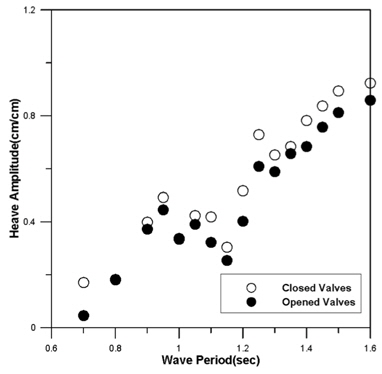
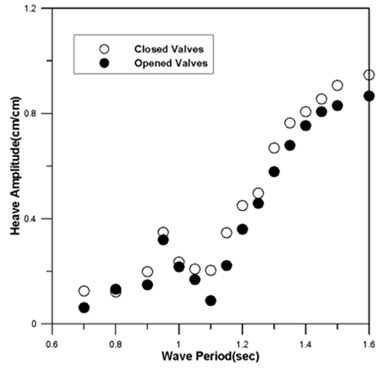
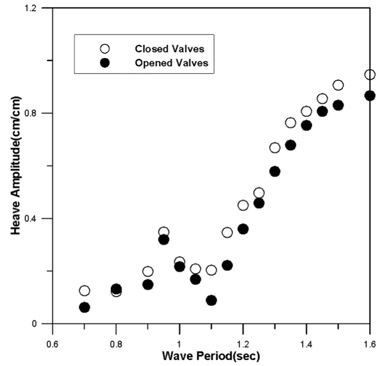
Fig. 7~10은 상부의 밸브의 개폐여부에 따른 각 부유체들의 Heave 운동을 나타내고 있다. Fig. 7은 부유체 No. 1의 Heave 운동을 나타내고 있다. 밸브를 잠궜을 경우가 밸브를 연 경우보다 다소 높게 나타나고 있음을 알 수 있다. Fig. 8은 부유체 No. 2의 Heave 운동을 나타내고 있다. 경향은 부유체 No. 1과 유사하지만, 응답값이 약 0.7%정도로 다소 낮게 나타나고 있다. 밸브를 연 경우와 닫은 경우를 비교하면 그 차이가 부유체 No. 1에 비해 차이가 크게 나타남을 알 수 있다. Fig. 9는 부유체 No. 3의 heave 운동을 나타내고 있다. 응답특성은 부유체 No. 2와 유사하지만, 그 응답값은 부유체 No. 2에 비해 낮게 나타나고 있다. Fig. 10은 부유체 No. 4의 Heave 운동을 나타내고 있다. 경향은 다른 부유체와 다른 형태를 보이고 있으며, 1.2초 이후의 장주기에서 밸브를 연 경우가 닫은 경우보다 높게 나타나고 있지만 그 차이는 거의 없음을 알 수 있다. 응답값은 부유체 No. 2, 3에 비해 높게 나타남을 알 수 있다. 평균적으로 밸브를 닫은 경우가 열은 경우보다 약 1.6% 운동이 증가하였다.
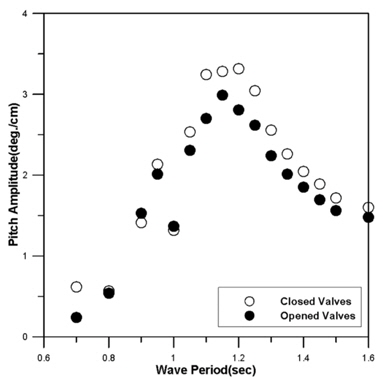
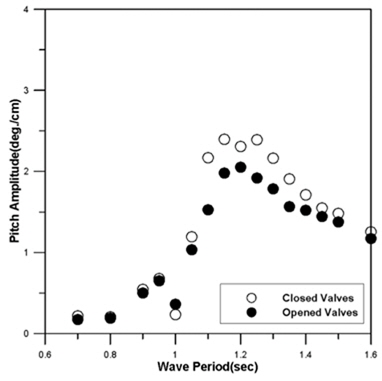
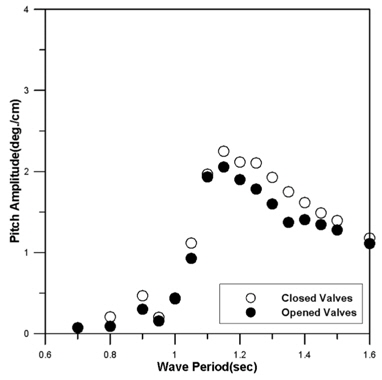
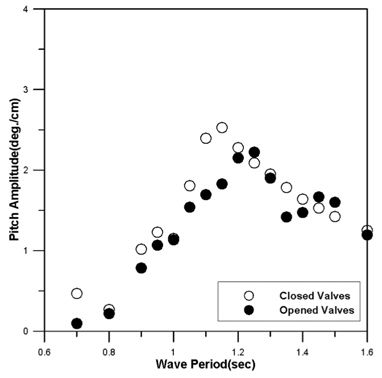
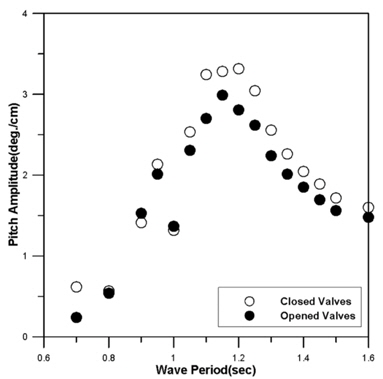
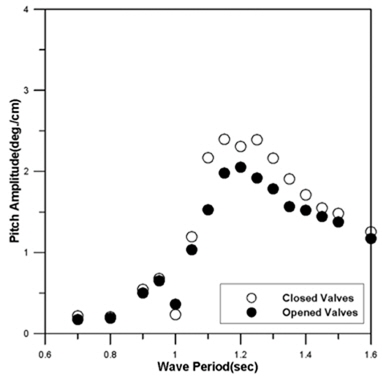
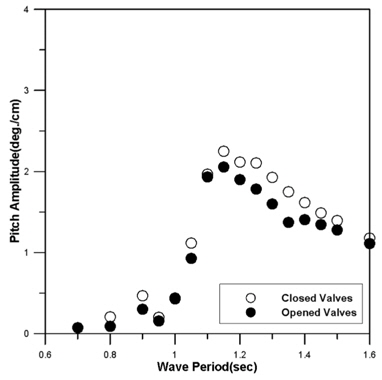
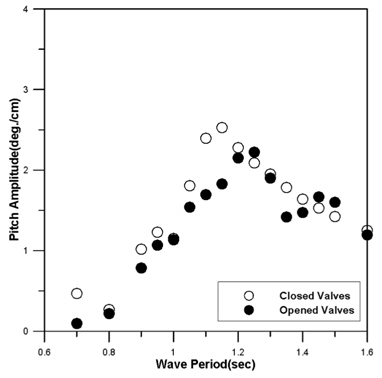
Fig. 11~14는 상부의 밸브의 개폐여부에 따른 각 부유체들의 Pitch 운동을 나타내고 있다. Fig. 11은 부유체 No. 1의 Pitch 운동을 나타내고 있다. 피크치 부분에서 밸브를 잠궜을 경우가 밸브를 연 경우보다 약 11.4% 정도 크게 나타나고 있음을 알 수 있다. Fig. 12는 부유체 No. 2의 Pitch 운동을 나타내고 있다. 경향은 부유체 No. 1과 유사하지만, 응답값이 다소 낮게 나타나고 있다. 밸브를 잠궜을 경우가 밸브를 연 경우보다 피크치에서 약 13.43% 높게 나타나고 있다. Fig. 13은 부유체 No. 3의 Pitch 운동을 나타내고 있다. 응답특성은 부유체 No. 2와 유사하지만 응답값은 조금 낮게 나타나고 있으며, 피크치에서 약 8.6% 높게 나타남을 알 수 있다. Fig. 14는 부유체 No. 4의 Pitch 운동을 나타내고 있다. 경향은 다른 부유체와 다른 형태를 보이고 있음을 알 수 있다. 응답값은 부유체 No. 2, 3에 비해 높게 나타남을 알 수 있다. 피크치 부분에서 밸브를 잠궜을 경우가 밸브를 연 경우보다 약 13.84% 높게 나타나고 있다. Pitch 응답은 밸브의 개폐여부에 따라 부유체 No. 1, 2, 4에서 운동의 차이가 발생했다. 부유체 No. 3에서는 밸브의 개폐여부에 따른 영향이 크게 나타나지 않았다. 밸브를 닫았을 경우가 밸브를 열었을 때보다 응답의 피크값이 평균 약 12%정도 pitch 운동이 증가하였다. 밸브의 개폐여부에 따른 내부유체의 유동의 변화가 발생하며, 내부유체의 유동의 변화는 Anti-pitch방향으로 작용하여 운동에 영향을 미치는 것으로 사료된다. 본 파력발전 시스템은 Heave 운동보다는 pitch 운동을 극대화시킴에 의해 높은 에너지 효율을 가지도록 설계되어져야 하기 때문에 피크치 부근에서의 Pitch 운동이 무엇보다 중요하다.
본 연구에서는 진동수주형 파력발전 시스템을 4개의 부유체로 힌지 연결하여 실험을 행하였다. 밸브의 개폐여부에 따른 운동을 평가하여 다음과 같은 결론을 내릴 수 있다.
(1) Heave 운동은 밸브를 닫았을 경우가 열었을 경우보다 응답이 크게 나타나지만, 그 차이는 크지 않음을 알 수 있다. 특히, 부유체 No. 4의 경우에는 부유체 No. 2, 3번에 비해 피크치에서 큰 운동 차이를 보임을 알 수 있다. 운동의 경향을 보면 부유체 No. 1, 4번이 운동의 크기는 다르지만 유사한 경향을 보이고 있으며, 부유체 No. 2, 3번이 운동의 크기도 비슷하며 유사한 경향을 보임을 알 수 있다. 장주기파에 대해서는 부유체 No. 4번의 운동이 크게 나타남을 알 수 있다.
(2) Pitch 운동은 밸브를 닫았을 경우가 열었을 경우보다 응답이 크게 나타나고 있으며, 특히, 부유체 No. 4의 경우에는 부유체 No. 2, 3번에 비해 피크치에서 큰 운동차이를 보임을 알 수 있다. 운동의 경향을 보면 부유체 No. 1, 4번이 운동의 크기는 다르지만 유사한 경향보이고 있으며, 부유체 No. 2, 3번이 운동의 크기도 비슷하며 유사한 경향을 보임을 알 수 있다.
(3) Heave보다 Pitch 운동에서 밸브 개폐여부에 따른 응답차이가 크게 나타났다. 이것은 Pitch 운동에서 밸브를 닫았을 경우보다 열었을 경우가 내부 유체의 유동이 더 크게 발생함에 따라 Anti-pitch 방향으로 작용하여 Pitch 응답을 감쇠시킨 것에 기인한 것으로 사료된다.
(4) 진동수주형 파력발전 시스템은 Pitch 운동을 피크치 부분에서 극대화시킴에 의해 높은 에너지 효율을 가지도록 설계된다. 따라서, 최적화 모델을 선정하기 위해서는 본 실험결과를 이용하여 파랑 중 진동수주형 파력발전 시스템의 다수부유체에 대해 내부유체 유동을 고려한 수치계산기법 개발이 무엇보다 시급하다고 사료된다.