최근 Semi-rig등의 해양 구조물 수주 공사는 EPCI(Engineering, procurement, construction and installation)로 구성되며, 이 중에서도 설치는 공사의 최종 단계로서 성공적인 공사 수행을 위해서는 설치 해역의 환경 조건을 신중하게 고려하여야 한다 (Cholley and Cahay, 2007). 상부 모듈의 해상 설치 방법은 Floating crane에 의한 Lifting법과 운송선(Heavy lifting vessel)에 의한 해상 결합법(Mating)으로 분류된다(Chakrabarti, 2005). Lifting법은 Spar등과 같은 하부 Hull에 적용되며, Floating crane과 Spar 하부 Hull의 연성 거동을 고려한 Lifting force의 검토가 수행되었다(Lee, 2011). 한편, 설치 대상물의 중량이 Floating crane의 Lifting 용량을 초과할 경우에는 상부 모듈의 운송선 선적에 의한 해상 결합법이 이용된다. 이 방법에 적용되는 하부 Hull유형은 고정식 또는 부유식으로 나누어지며, 고정식 유형은 Jacket, GBS와 같은 해양구조물이 해당된다. 이 하부 Hull들은 해저에 고정되어져 거동하지 않으므로 상부 모듈을 탑재한 운송선만의 거동에 의한 lifting 하중이 계산되어진다(Joo and Lee, 2005; Jung et al., 2009; He et al., 2011; Tribout et al., 2007; Seij and Groot, 2007). 부유식 유형은 Semi-rig, TLP(Tension leg platform)등과 같은 하부 Hull로서 위치 유지를 위해서 해상에 계류를 하며, 이 상태에서 운송선의 Ballasting 또는 하부 Hull의 De-ballasting에 의해 상부 모듈을하부 Hull에 해상 결합하며, 이에 대한 연구 논문은 활발하게 이루어져 있지 않다. 본 논문에서 다루는 하부 Hull은 부유식 유형에 해당하며, 운송선 Deck상에 선적된 상부 모듈이 해상에 계류되어진 Semi-rig 하부 Hull의 Column상에 위치 이동한다. 이 과정에서는 모듈의 자체 자중외에도 바람, 파도 등과 같은 환경 외란에 의한 동하중이 발생한다. 고정식 유형에 비해 별도의 하부 Hull의 Ballast plan이 필요하며, 해상 상태에 따라 운송선과 하부 Hull의 연성 운동을 고려하여 동하중 해석을 수행해야 한다. 이러한 동하중은 충격 흡수용 LMU(Leg mating unit)의 설계 및 설치 구조 해석을 위한 입력 정보로 이용된다. ISO rule part 6 및 Noble denton 0027/ND에 따르면, 2,500ton 이상의 중량 권상 설치시 가해지는 동하중은 전체 하중의 10%를 적용하도록 규정하고 있으나, 실제로는 설치 해역의 환경 조건에 의해 정량적으로 평가되어져야 한다. 본 논문에서는 바람 및 조류가 일정한 속도 및 방향으로 입사할 경우, 파고 및 파 방향 변화에 의한 해상 결합 지점에서의 정적 하중 대비 동하중이 차지하는 비율을 정량적으로 산정하였다. 동하중 평가는 범용 프로그램인 SIMO를 이용하였으며(Reinholdsten et al. ,2003), 운동 계산은 WADAM을 이용하였다(Lee et al., 1991).
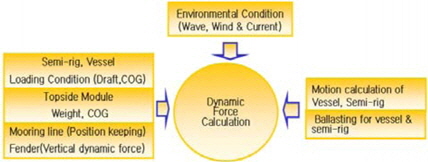
해상 결합 해석은 Marintek에서 개발한 SIMO에 의해 수행되어지며, 이론 수식은 참고문헌(Reinholdsten et al., 2003)에 자세히 수록되어 있다. 본 프로그램에 의한 해석 과정은 정적평형 계산, 동적 변위와 동하중 계산 및 계산 결과의 통계 처리로 나누어진다. Fig. 1은 본 해석을 위해 필요한 파라메터에 대해 나타내고 있으며, 각 해석 과정에 어떻게 도입되는지 다음 절에서 설명한다.
본 단계는 해상 결합시 동하중 계산을 하기 이전에 대상 시스템이 정적으로 평형 상태를 가지는지 확인 한다. 이를 위해서는 상부 모듈의 중량 및 이를 선적한 운송선 및 Semi-rig 하부 Hull의 흘수, 무게 중심점(C.O.G., center of gravity) 등의 Hydrostatic 정보가 요구된다.
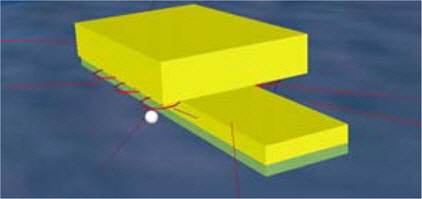
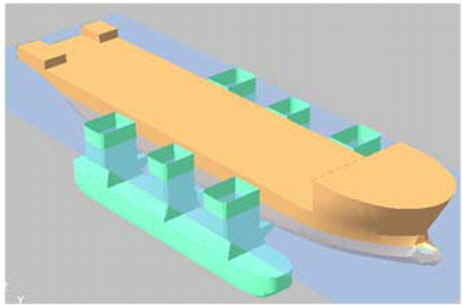
대상 시스템의 국부 위치에서의 동적 변위, 동하중을 계산하는 단계로서, 운송선 및 Semi-rig의 운동 계산은 DNV 상용 프로그램인 WADAM을 이용한다. Fig. 2에 보는 바와 같이 운송선의 위치를 유지하기 위해서 8개의 계류삭을 모델링하였으며, SIMO에서 제공하는 Fender 모델을 가정하여 국부 지점 동하중을 계산한다. 계류삭은 직경 50mm의 Wire 재질(최소파단하중 177.0ton)로 가정하였으며, 환경 조건으로는 파도, 바람 및 조류를 입력한다. 또한, 운송선 Deck상에서 Semi-rig 하부 Hull의 Column상으로 해상 결합 하중 전달을 위해서는 적절한 Ballasting이 이루어져야 한다. Semi rig의 하부 Hull 제원은 폰툰 길이 118m, 폰툰 높이 10m, 폰툰간 내측 간격 41m, 컬럼 높이 26m 및 컬럼간 내측 간격 46m이다.
3. 운송선, Semi-rig 하부 Hull의 Ballast Plan
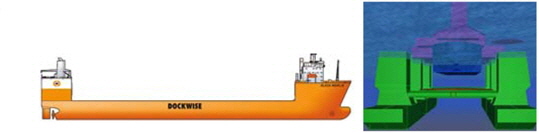
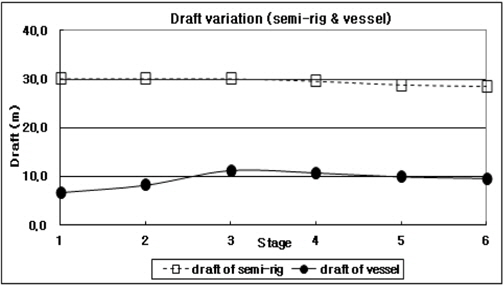
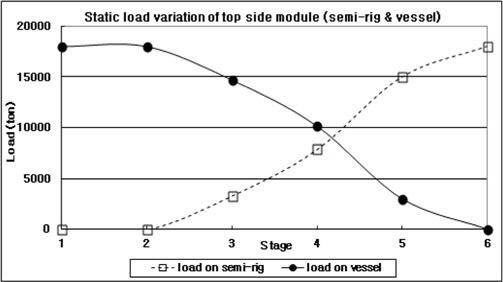
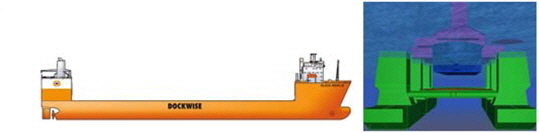
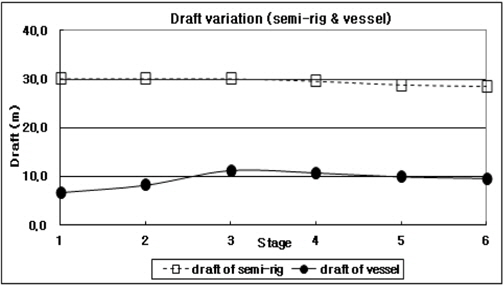
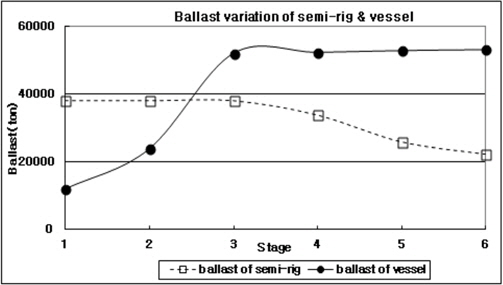
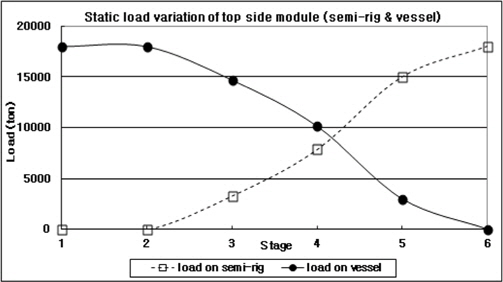
Fig. 3에서는 상부 모듈을 선적하는 운송선과 하부 Hull 상에서의 선적 운송선의 Stand-by 상태를 나타내고 있으며, 운송선의 제원은 Lbp 206.57m, B 42m 및 D 13.3m이다. Semi-rig Column과 상부 모듈의 초기 수직 간격은 1.5m 떨어져 있으며, 상부 모듈의 중량은 18,000ton(176,580KN)이다. Fig. 4에서 Fig. 6은 해상결합 과정을 편의상 Stage 1에서 Stage 6 단계로 구분하여 각단계별 운송선(Vessel)과 Semi-rig 하부 Hull의 흘수 변화, Ballast량의 변화 및 Cargo 하중 전달 변화를 나타낸다. 하중 전달이 발생하는 전 과정을 Ballast량 변화에 따라 단계별로 나누었으며, 초기에는 상부 모듈의 모든 중량이 운송선의 Deck에 가해지고 있지만, 최종적으로 상부 모듈의 모든 중량이 Semi-rig의 Column상으로 전달된다. 하부 Hull이 부유식 일 경우, 해상 결합법에 의한 상부 모듈의 설치는 일반적으로 운송선의 Ballast량 및 Semi-rig 하부 Hull의 De-ballast량에 의한 흘수를 조절하여 Column상에 상부 모듈을 이동한다.
우선, Column 상부와 선적 모듈 하부의 간격을 줄이기 위해서 운송선의 Ballast량을 점차적으로 증가시키며, 운송선의 흘수가 어느 정도 깊게 된 상태에서 계속 유지시킨다.
반면, Semi-rig 하부 Hull의 Ballast량은 초기에는 변화없이 유지하다가 이 후, De-ballasting으로 흘수를 줄여 하부 Hull의 연직 상방 상승으로 운송선의 상부 모듈을 하부 Hull의 Column상에 완전하게 이동시키는 방법을 이용하였다.
Fig. 4에는 운송선과 Semi-rig의 흘수 변화를 그래프로 나타내었으며, Stage 1에서 Stage 3까지는 운송선의 Ballast량 증가에 의해 운송선의 흘수가 증가하고 있으며, Stage 4에서 Stage 6까지는 Semi-rig 하부 Hull의 De-ballast에 의해 흘수가 서서히 감소함을 알 수 있다. Fig. 5는 Stage별 운송선과 Semi-rig 하부 Hull의 Ballast량 변화를 보여준다. 그림에서 보듯이, Stage 1에서 Stage 3까지는 Semi-rig 하부 Hull의 Ballast량은 변화시키지 않고 운송선의 Ballast량만을 증가시켰다. 이후에는 역으로 운송선의 Ballast량은 거의 변화시키지 않고, Semi-rig 하부 Hull의 Ballast량만을 감소시킨다. 이와 같은 Ballast량 변화에 따른 Stage별 상부 모듈의 하중 전달 결과는 Fig. 6에 보는 바와 같다. 하중 전달을 하기 위해서는 각 Body자체 흘수 변화만을 위한 Ballast량 또는 De-ballast량 뿐만 아니라, 상대 Body에도 하중 전달을 위한 Ballast량 또는 De-ballast량이 포함되어져야 한다. 이때의 하중 변화는 정적 하중으로서 바람, 파도 및 조류 등의 환경인자는 고려되지 않았다.
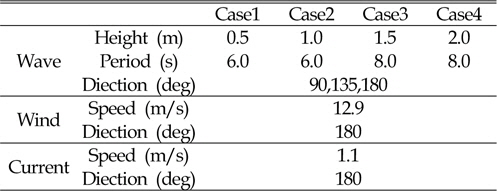
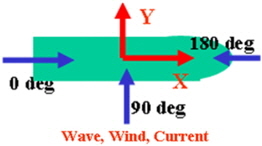
해상 설치 해역의 파도, 바람 및 조류에 대한 정확한 정보 부족으로 과거 수행한 프로젝트의 해상 결합 해역에 사용한 정보를 참고로, Table 1에 환경 조건을 나타내었다. 유의 파고는 최대 2.0m, 풍속은 최대 12.9m/s 및 조류 속도는 1.1m/s로 가정 하였다. 풍속 및 조류 속도가 크지 않은 상태에서는 파도에 의한 영향이 3가지 환경 요소 중에서 제일 지배적이므로, 파고의 변화에 따른 경우를 고려했으며, 바람 및 조류는 선수파(180도)조건으로 고정하였다.
[Table 1] Environmental condition (wave, wind and current)
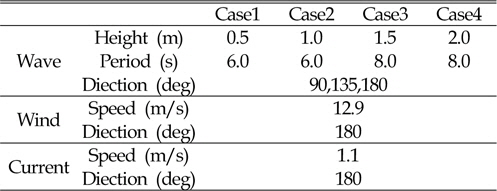
Environmental condition (wave, wind and current)
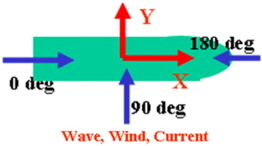
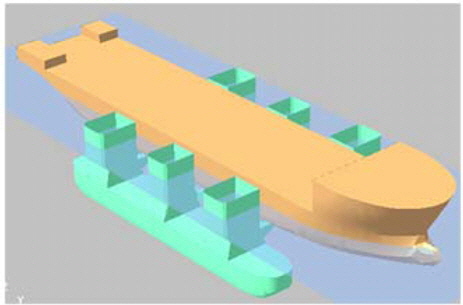
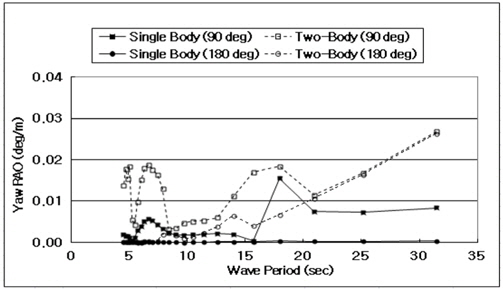
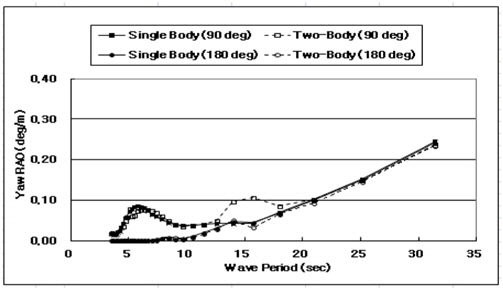
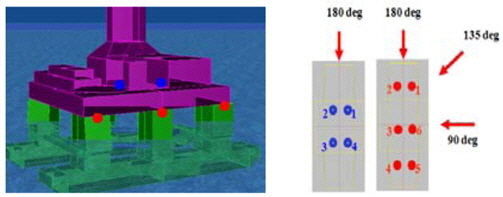
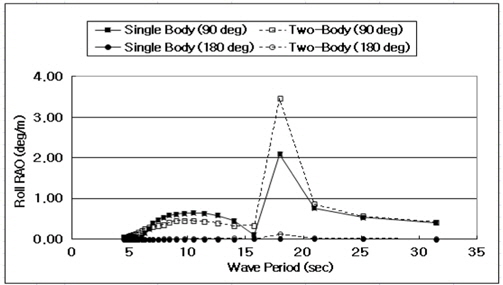
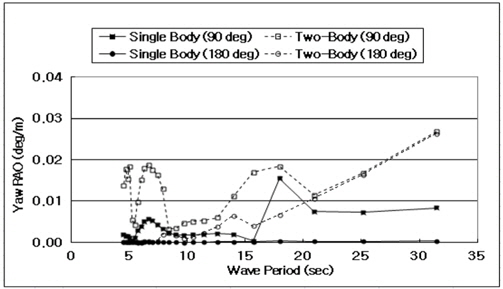
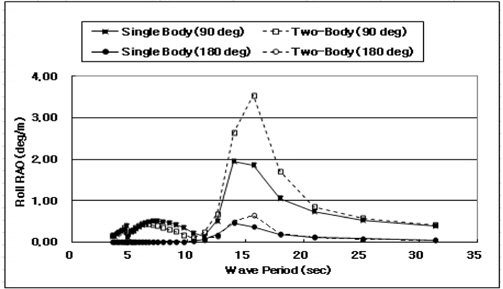
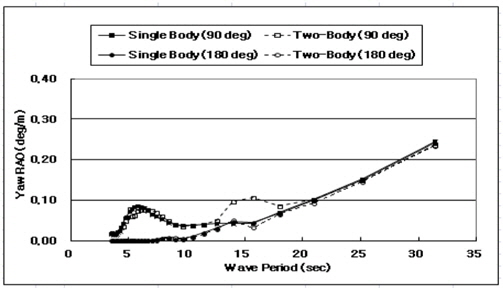
SIMO에 의한 시간 영역 동하중을 산정할 경우, 바람 및 조류 등의 환경 외란은 본 프로그램 자체적으로 풍속, 조류 속도 등의 데이터를 입력하여 외력으로 산정할 수 있다. 하지만, 파도에 의한 외력 특성은 WADAM을 이용해서 운동 RAO(response amplitude operators) 및 파 강제력, 2차 파 표류력 등의 주파수 특성 데이터를 계산하여 SIMO에 입력하며, SIMO가 보유하고 있는 시간 이력 계산 알고리듬을 통해 동하중을 계산한다. Fig. 7은 본 시스템의 좌표 및 환경 외란의 방향각 정의를 나타낸다. Fig. 8에는 Two body WADAM에 사용된 모델의 Configuration 으로서 Semi-rig의 Column사이에 해상 결합을 위한 운송선이 위치해 있으며, Two body Model을 이용한 운동 특성을 계산하였다. Fig. 9에서부터 Fig. 12는 운송선(Vessel) 및 Semi-rig의 90도 및 180도 Heading에서의 Roll 및 Yaw의 운동 특성을 Single body인 경우와 Two body로 해석한 경우를 상호 비교하였다. Fig. 9과 Fig. 11에 나타낸 바와 같이 Two body를 고려한 Roll RAO의 경우 두 물체의 상호작용에 의해 Single body 상태의 RAO와 다소 다른 응답을 보이며, Semi-rig의 경우 180도 Heading에서도 Two body해석에서는 Roll의 진폭값이 나타남을 알 수 있다. Fig. 10와 Fig. 12에 나타낸 Yaw RAO의 경우, 운송선과 Semi-rig의 유체동역학적인 상호작용에 의해 Single body와 비교해서 Yawing현상의 차이점을 발견할 수 있다.
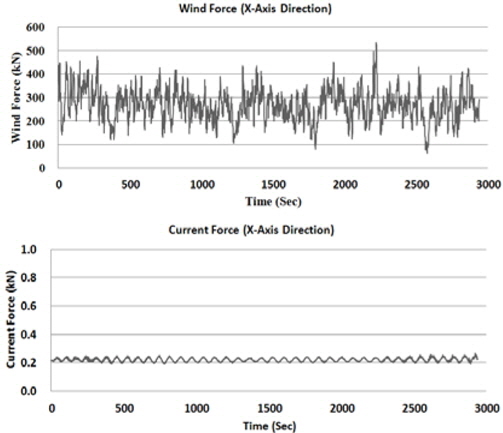
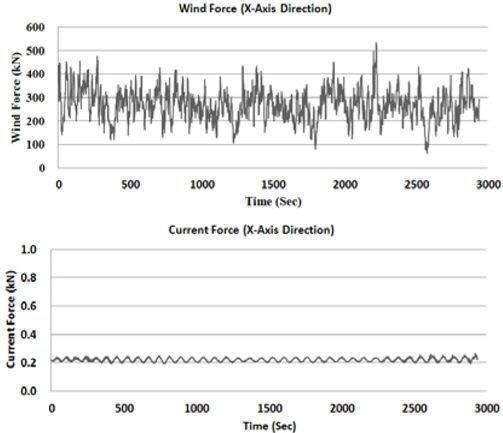
Fig. 13는 SIMO에 의한 풍하중 및 조류 하중의 시계열 해석 결과를 나타낸다.
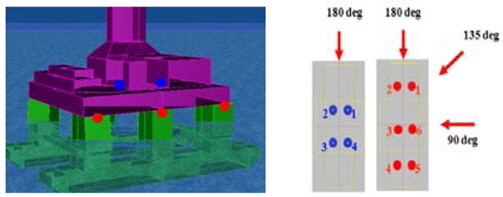
앞 절에서 설명한 파도, 바람 및 조류의 환경 외란에 의해 산정된 환경 외력과 Body의 Ballast 및 De-ballast를 통해 지점별 해상 결합 동하중이 자동적으로 계산되어진다. 산정된 동하중은 하부 Hull 및 상부 모듈의 구조적 안전성 평가에 사용할 수 있다. 동하중 산정 지점은 Fig. 14에 나타낸 바와 같이 운송선 Deck 상부 4지점과 하부 Hull column상 6지점으로 정하였다. Deck 상부 4지점은 DSU(Deck support unit)가 위치하는 지점이며, Column상 6지점은 LMU 지점으로 가정하였다.
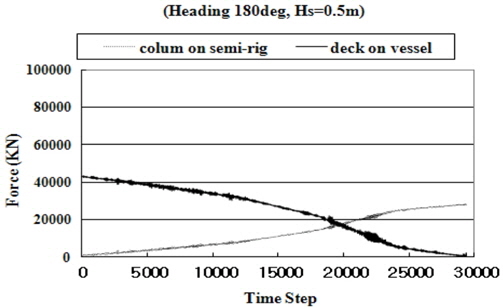
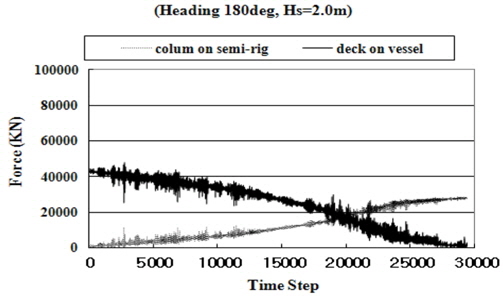
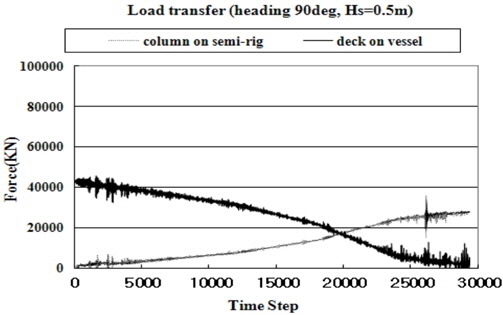
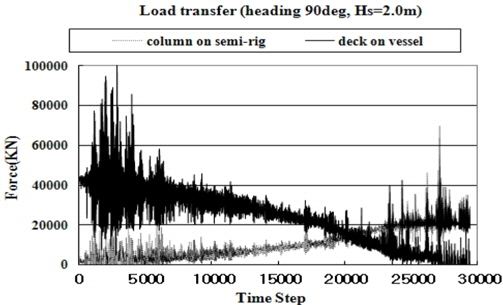
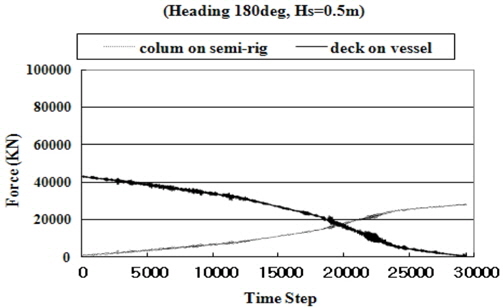
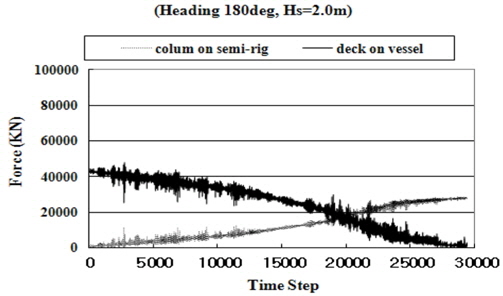
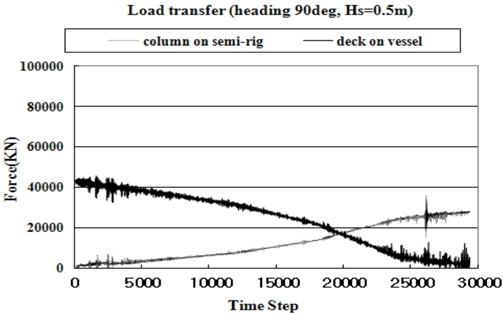
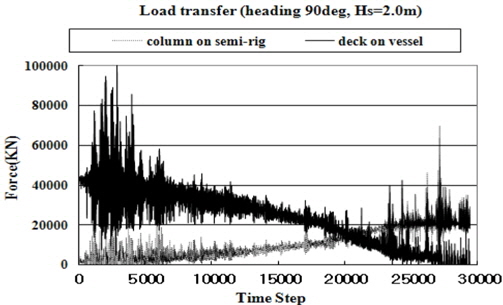
Fig. 15에서 Fig. 18는 운송선 Deck 및 Semi-rig Column상 임의 지점에서 180도 및 90도 Heading에서의 파고별 해상 결합 동하중의 시간 이력을 나타낸다. 결과에서 보듯이 초기에 Column상에는 거의 Zero의 하중을 가지고 있으나, 시간의 경과에 의해 상부 모듈의 하중 전달이 진행되어져 최종적으로는 운송선 Deck상의 하중이 Zero로 수렴하여 Column상으로 완전히 하중 전달됨을 알 수 있다. Column과 Deck 위치에서의 하중 차이를 보이는 것은 계산 위치 수가 상이하기 때문이다. 즉, Column의 경우 6 지점을 가정하였기 때문에, Column당 29,430KN(29,430KN * 6 = 176,580KN)의 정적 하중을 나타내고 있으며, Deck상의 경우, 4지점을 가정하여 지점당 44,145KN (44,145KN * 4 = 176,580KN)의 정적 하중을 나타낸다.
파고별, Heading별 경향을 파악해보면, 운송선 Deck상의 파고가 0.5m일 경우에는 Heading각에 따른 동하중 성분의 차이가 크지 않음을 알 수 있으나, 파고가 2.0m의 경우에는 90도 Heading에서 동하중의 증가가 180도 Heading에 비해 크게 발생함을 알 수 있다. 이는 Head sea보다는 Beam sea에서 파고 증가에 따른 하부 구조물의 유체 동역학적 특성이 크게 작용하기 때문이라고 판단된다.
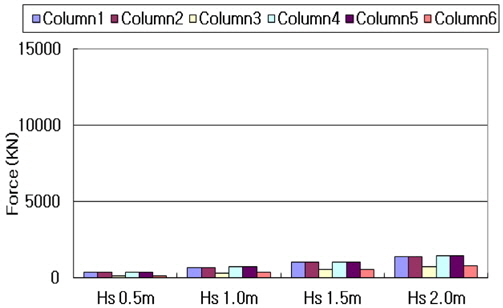
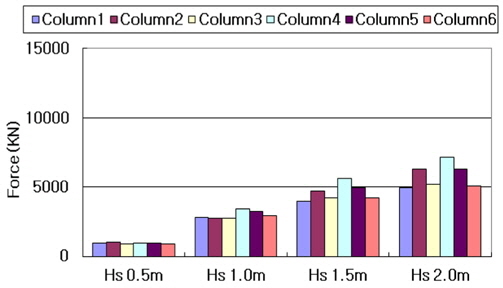
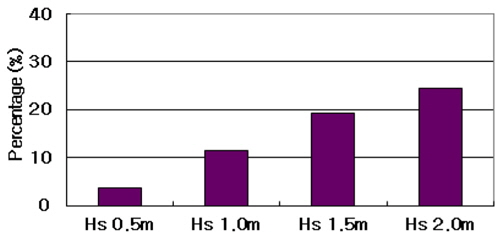
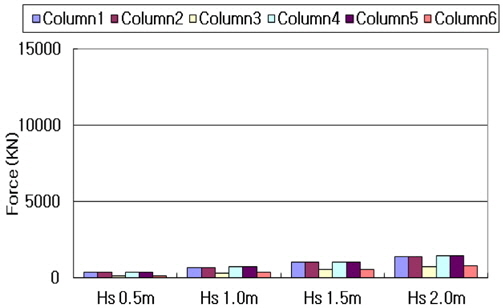
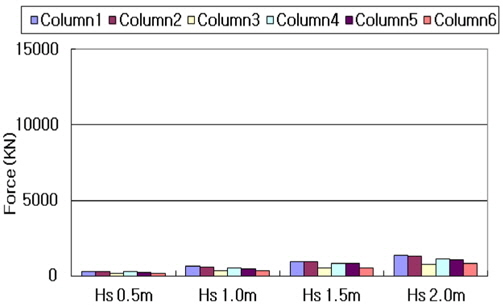
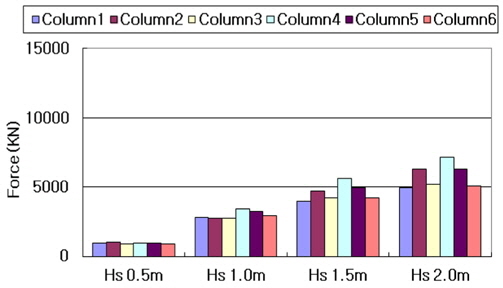
Fig. 19에서 Fig. 21는 6개 지점의 Semi-rig 하부 Hull의 Column상에서 90도, 135도 및 180도 Heading에서의 파고별 1/3유의 동하중 성분을 분석한 결과이다. 시간 이력 결과에서 파악하였듯이 90도 Heading에서의 동하중 성분이 다른 Heading 각도에 비해 크게 증가함을 알 수 있다.
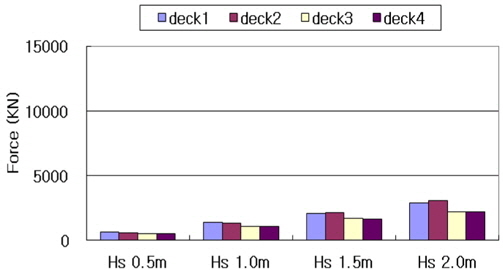
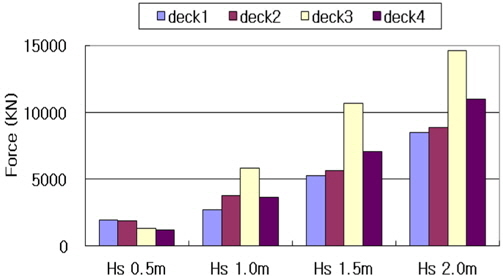
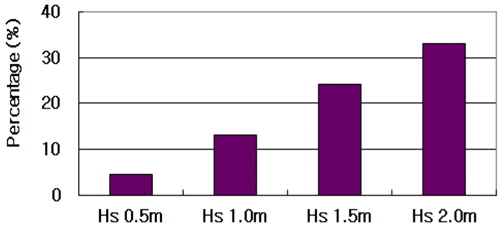
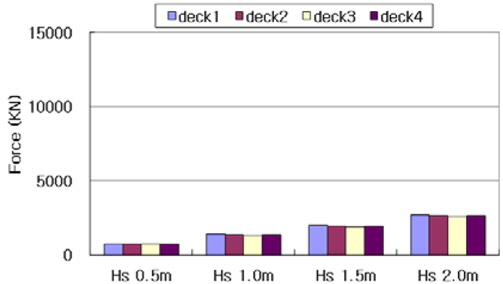
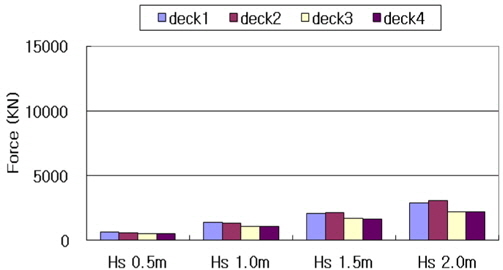
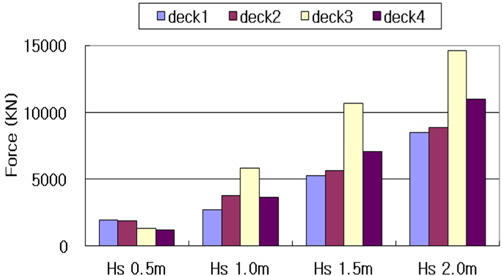
Fig. 22에서 Fig. 24는 4개 지점의 운송선 Deck위치에서의 90도, 135도 및 180도 Heading에서의 파고별 동하중 성분을 분석한 결과이다. Semi-rig Column상 분석 결과와 마찬가지로 90도 Heading에서 동하중이 크게 나타남을 알 수 있다.
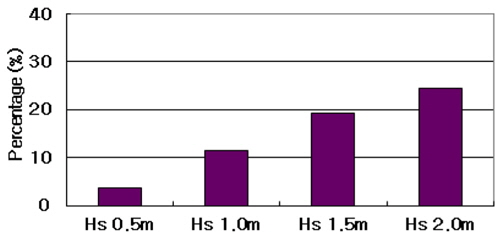
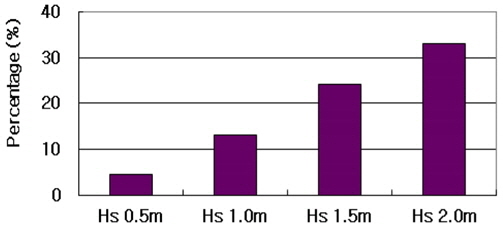
Fig. 25에서 Fig. 26은 동하중이 가장 큰 90도 Heading 조건에서 Column 및 Deck상에서의 Static Force 대비 Dynamic Force의 비율을 나타내고 있다. 그림에서 보듯이 파고의 증가에 따라서 최대 30% 이상의 동하중을 보이고 있다. Rule에서 권장하는 10%의 동하중을 보이기 위해서는 해상 결합 작업이 이루어지는 유의 파고 조건이 1.0m 미만이 되어야 함을 알 수 있다.
본 논문을 통하여 해상 결합 방법에 의한 대중량 상부 모듈의 하중을 전달하는 경우에 바람, 파도 및 조류의 환경 외란에 의해 발생하는 동하중을 산정하였으며, 다음과 같은 결론을 얻을 수 있다.
(1)운송선의 Ballasting 및 하부 Hull의 De-ballasting을 통하 여 상부 모듈의 하중 전달 과정을 확인하였다.
(2)운송선 및 하부 Hull의 Two body 운동 해석을 통하여 Roll 및 Yaw 특성이 Single body와 상이함을 파악하였지만, 해상 결합이 수행되는 주기 영역 (6sec ~ 8sec)에서는 운동 특성이 비슷하여 Two body 영향이 크지 않을 것이라 판단된다.
(3)상부 모듈의 해상 결합 작업은 상대적으로 온화한 기후 상태에서 수행되기 때문에 바람 및 조류의 영향은 크지 않다고 판단되어, 해상 결합 동하중에 영향을 미치는 파고 및 파도의 Heading 각도에 따른 영향을 검토하였다. 검토 결과, 낮은 파고에서는 동하중이 파도의 Heading 각도에 크게 영향을 받지 않음을 알 수 있었으며, 파고가 높아질수록 Heading 각도별 동하중의 차이가 명확해졌으며, 90도 Heading에서의 동하중이 다른 Heading 각도에 비해 크게 발생함을 알 수 있다. 이는 운송선의 운동이 급격하게 증가하였기 때문이라고 사료되며, 작업시동하중을 최소화하기 위한 계류 배치가 필요하다고 판단된다.
(4)산정된 동하중은 상부 모듈 및 Semi-rig Column의 구조 안전성 평가를 위한 기본 데이터로 이용되어지며, 설치시의 충격 흡수용 설비인 LMU의 설계를 위한 기본 값으로 활용 가능하다.