Chaotic dynamics is an active research area in fields such as biology, physics, sociology, psychology, physiology, and engineering. Interest in chaos is also expanding to the social sciences, such as politics, economics, and societal events prediction. Most people pursue happiness, both spiritual and physical in many cases. However, happiness is not easy to define, because people differ in how they perceive it. Happiness can exist in mind and body. Therefore, we need to be happy in both simultaneously to achieve optimal happiness. To do this, we need to synchronize mind and body. In this paper, we propose a chaotic synchronization method in a mathematical model of happiness organized by a second-order ordinary differential equation with external force. This proposed mathematical happiness equation is similar to Duffing’s equation, because it is derived from that equation. We introduce synchronization method from our mathematical happiness model by using the derived Duffing equation. To achieve chaotic synchronization between the human mind and body, we apply an idea of mind/body unity originating in Oriental philosophy. Of many chaotic synchronization methods, we use only coupled synchronization, because this method is closest to representing mind/body unity. Typically, coupled synchronization can be applied only to non-autonomous systems, such as a modified Duffing system. We represent the result of synchronization using a differential time series mind/body model.
In the last two decades, chaotic dynamics has been used widely in real-world applications, such as biological systems [1], brain modeling [2], weather modeling [3], vibration modeling [4], mechanical and electrical engineering [5, 6], control and synchronization [7-11], robotics [12, 13], and others [14-18]. Currently, it is also being studied by many researchers in biology, physics, sociology, psychology, physiology, and engineering. However, this research is not limited to the natural sciences, but is spreading to the social sciences, such as politics, economics, and the prediction of societal events such as happiness and addiction [14, 19].
Most people pursue happiness. However, happiness is not easy to define, because people differ in how they perceive it. Research in mathematical models of happiness has been conducted by many researchers including physicists, psychologists, engineers, physiologists, and mathematicians. Many mathematical models of happiness have been introduced [15-17]. Sprott [15] proposed dynamical models of happiness in 2004 and in 2005. He described a simple linear model, a lottery-winning model, a drug or other addiction model, and an anticipation model for arousing happiness. Sinha et al.[14] proposed a dynamics of love and happiness and discussed the stability of their proposed model.
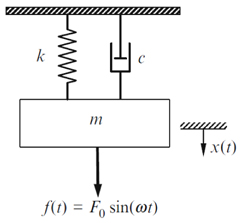
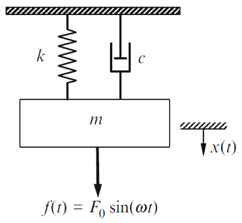
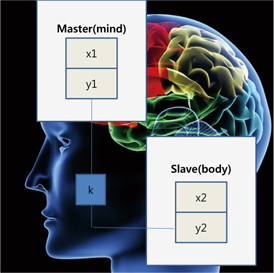
In this paper, we propose a chaotic synchronization method in a mathematical model of happiness organized by a secondorder ordinary differential equation with external force. This proposed mathematical happiness equation is similar to Duffing’s equation, as shown in Figure 1, because it is derived from that equation. We introduce our mathematical happiness model by using the derived Duffing equation, and then we demonstrate chaotic phenomena from the happiness model using a time series and phase portrait. We assume that the happiness model is divided into two parts, spiritual and physical.
To achieve chaotic synchronization between the human mind and body, we apply an idea of mind/body unity originating in Oriental philosophy. Of many chaotic synchronization methods [5-8], such as coupled, driven, coupled driven, phase, completed, and generalized synchronization, we use only coupled synchronization, because this method is closest to representing mind/body unity. Typically, coupled synchronization can be applied only to non-autonomous systems, such as a modified Duffing system. We represent the result of synchronization using a differential time series mind/body model.
The mathematical happiness models proposed by Sprott [15] in 2005 include simple linear, lottery-winning, drug and other addiction, real-life, nonlinear effect, and anticipation models. The formulation of happiness is given by Eq. (1).

where
However, Eq. (1) does not provide an exact definition of a dynamical happiness model for each parameter. To describe exact variables in such a model, we must define the parameter that relates happiness and perception. This is similar to current in an electrical RLC series circuit and velocity in a mechanical spring-damper-mass system. Hence, we can apply those ideas in our dynamical happiness model to derive a new formula.
In this paper, we define happiness (

where
We define happiness (
where
The control coefficient (
The desire coefficient represents a criterion of human desire. It is related to will and gratitude, which are person-dependent. If this value is sufficiently high, people tend to feel happy about minor things. As a result, their happiness will continue for a long time. The sense coefficients that represent the feeling of happiness differ greatly from person to person owing to differences in perceptivity.
In this paper, as vibrations result from the exchange of energy between the motion energy of a mass and the position energy of a spring in a spring-damper-mass system, we handle the occurrence of physical and mental fluctuation in terms of an exchange of energy or consciousness between the desire and sense coefficients in our dynamical happiness model.
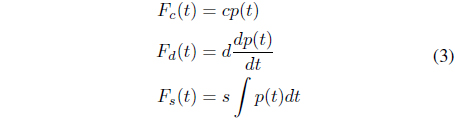
With that theoretical background, we can finally derive a second-order equation for happiness with three independent parameters, the control, desire, and sense coefficients. This equation is given by (4).

where,

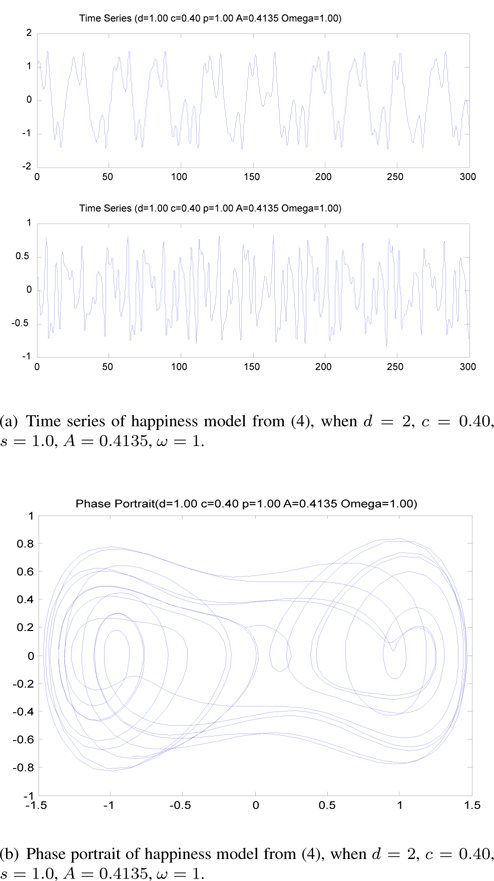
From Eq. (4), we obtain a time series and phase portrait, as shown in Figures 2(a) and (b), respectively.
3. Chaotic synchronization between mind and body using linear couplings
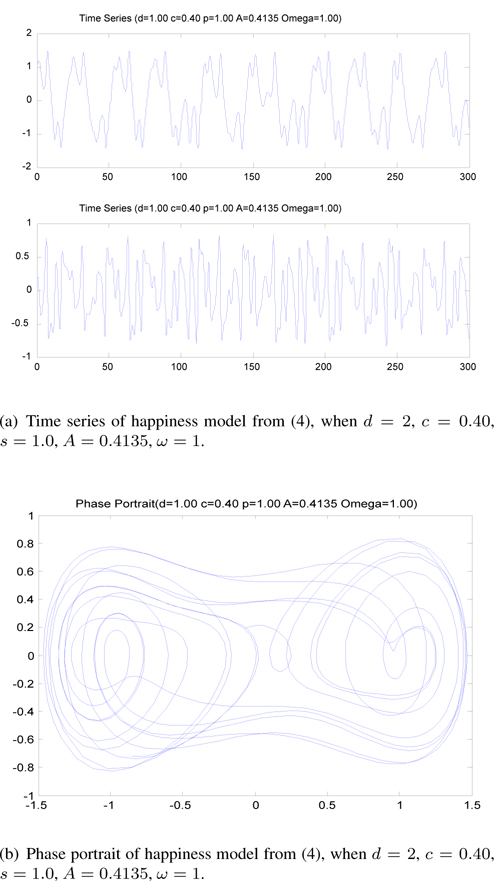
In this section, we establish a chaotic synchronization technique between mind and body in human beings using an Oriental philosophical idea of mind/body unity. To achieve mind/body synchronization, we assume that mind and body each has a chaotic model, such as a Duffing equation similar to Eq. (4). Figure 3 shows a human mind/body synchronization device.
From Figure 3, we can distinguish three synchronization methods, linearly coupled, driven, and coupled-driven. However, in this paper, because we consider only non-autonomous systems, the modified Duffing type, we need apply only linearly coupled synchronization. Because driven and coupled-driven synchronization can be used only with autonomous systems, we do not consider applying them to a modified Duffing type.
Linearly coupled synchronization in two identical systems has been studied in several papers [20, 21]. It can be described in general form by Eq. (6).

where , and
The synchronization procedure is formulated to find K such that
To apply linear coupling to the human mind and body using the Duffing equation, we must define identical master and slave models as follows.
Master model
We assume that the master model is the mind model and that it can be expressed using the Duffing Eq. (7).

Slave model
We also assume that the slave model is the physical model and that it can be expressed using the Duffing Eq. (8).

From Eqs. (7) and (8), we must find a stable solution for
Because we assume that the master is the mind and the slave is the body, the parts of this system can communicate with each other by recognizing a human being. Finally, the mind and the body can be synchronized through action recognition. For these situations, we will call these the oneness of mind and body.
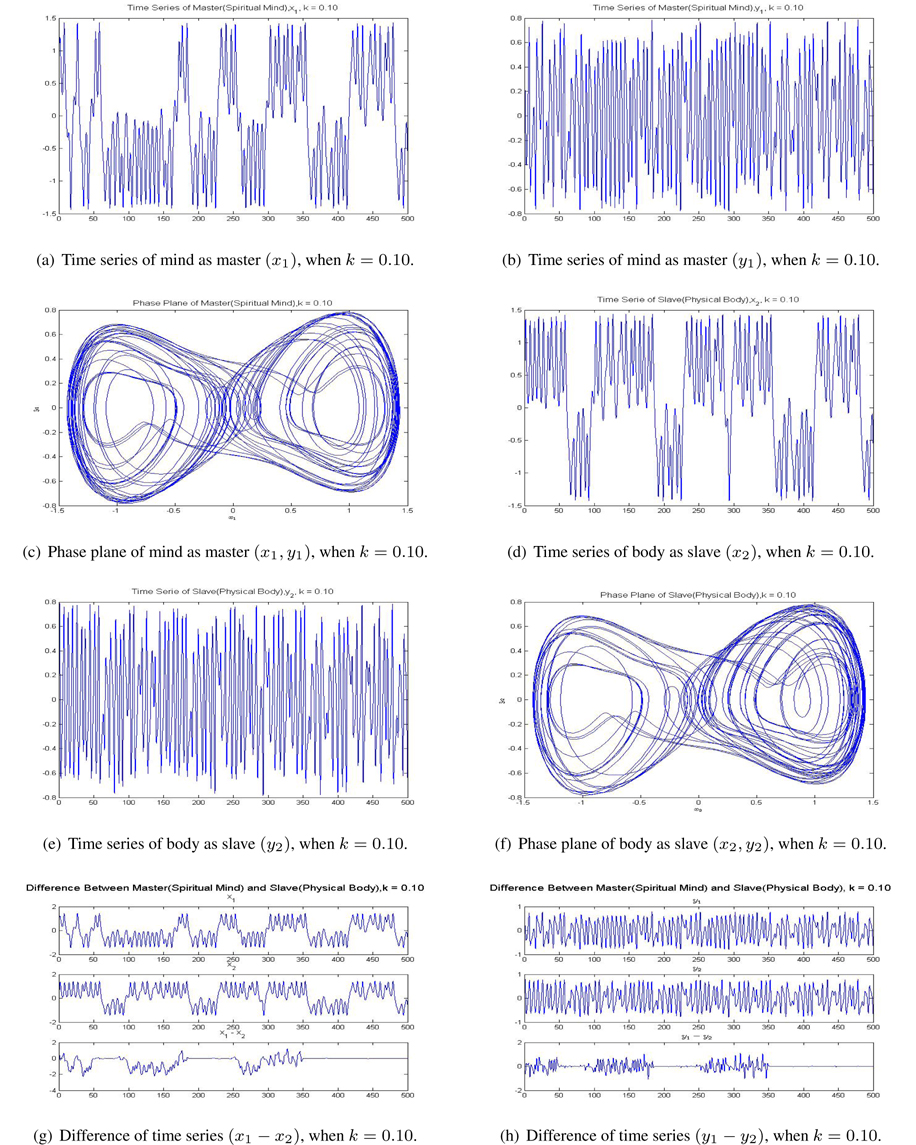
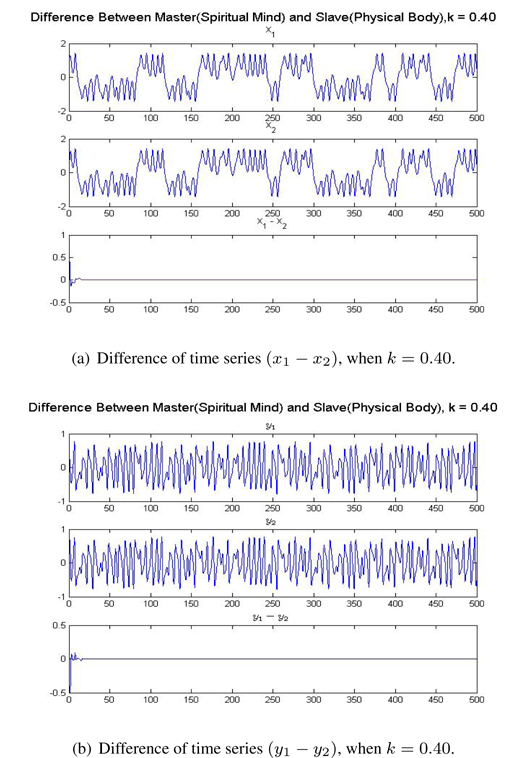
Figure 4 shows the results of mind/body synchronization, when
[Figure 4.] Result of synchronization between the mind and body using linear coupling when k = 0.10.
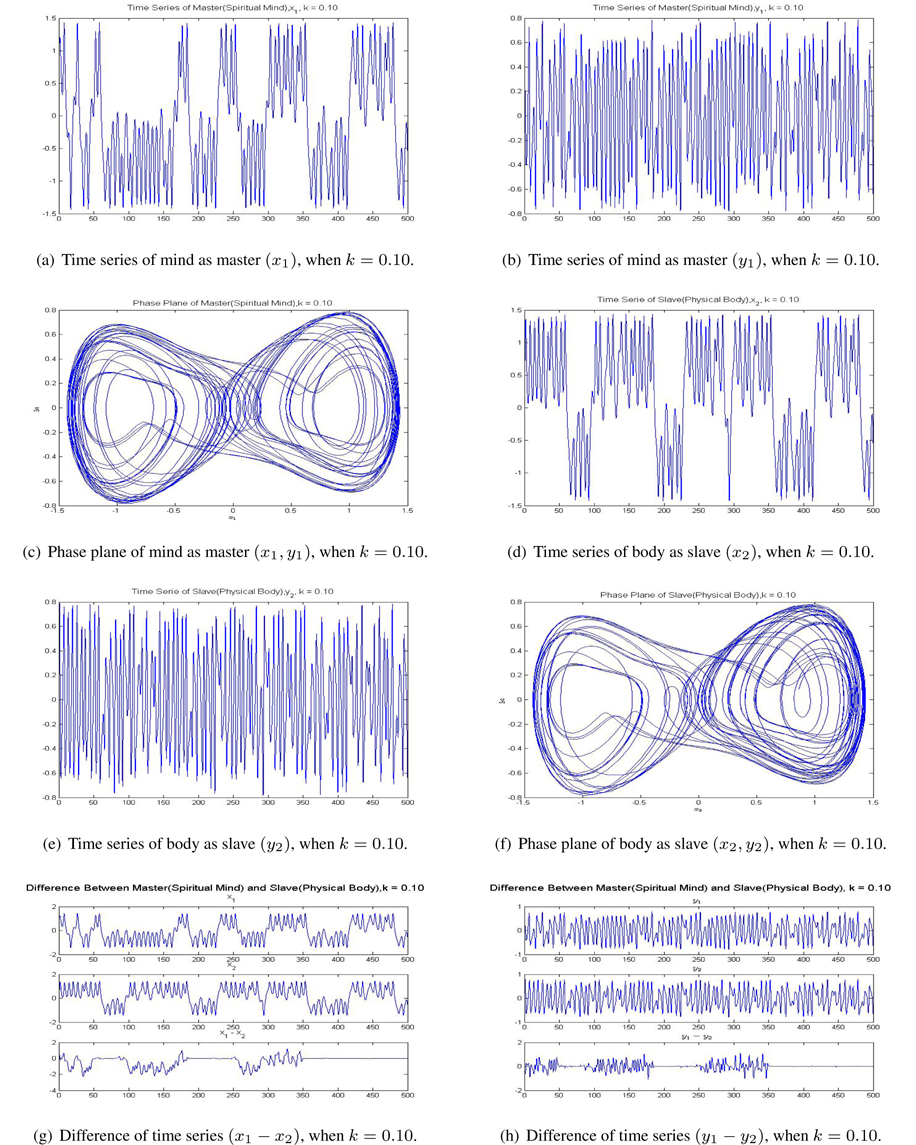
From Figure 4 we recognize that synchronization between mind and body is not achieved completely. This means that mind and body have not become one.
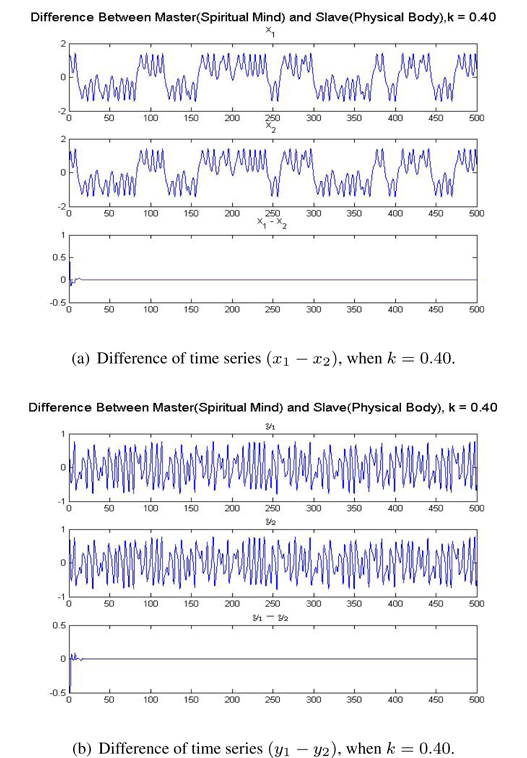
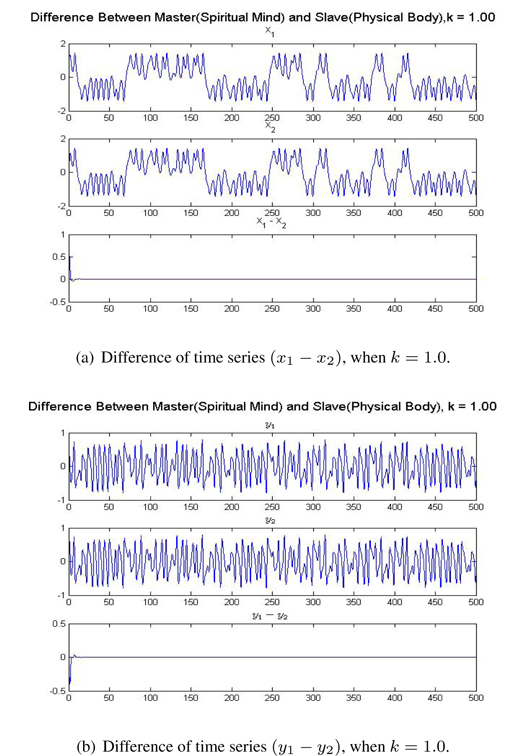
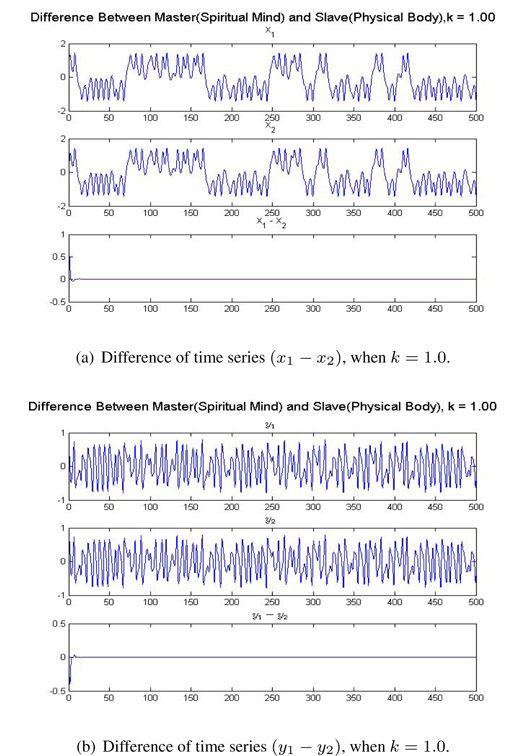
With the same condition, when we change to
From Figures 5 and 6, we see that synchronization between mind and body is achieved completely and is achieved more rapidly and fully, when the value of
We proposed a chaotic synchronization method in a mathematical happiness model organized by a second-order ordinary differential equation with external force. This proposed mathematical happiness equation is similar to a modified Duffing’s equation and is derived directly from that equation. We applied linear coupling synchronization to the modified Duffing equation to demonstrate the result of synchronization by determining the feedback gain, k. Finally, we showed the result of synchronization through a time series and phase portrait of master and the slave models, as well as the difference of the two time series.