Recently it has become easier to figure out cargo positional information by using GPS(Global Positioning System) and wireless communication technology. The acceleration of globalization in the shipping logistics is ever more increasing the need to provide visibility, traceability and real time informations of entry, departure of vessel including cargo and status of logistic vehicle entry into each logistic base. Providing such positional information to logistics party by using wireless communication technology can bring effective operation of supply chain and reduction in logistics costs. In the previous paper, I suggested a global location tracking system based on GPS data in global shipping logistics by means of software using GPS data. However, the previous system had a problem of being inadequate to figure out a real time location movement information and was unsatisfactory on quickly searching and checking the location of global logistics hubs according to the longitude and latitude coordinates. Hence, in this paper, I suggest a real-time location tracking system that provided real-time location of the container cargos and logistics hubs can be searched quickly according to the GPS coordinates in global shipping logistics.
화물의 이동이 글로벌화됨에 따라 물류경로 전반에 대한 통제를 위해 화물의 가시성(Visibility)과 추적성 (Traceability)이 요구된다. 이를 위해 기존의 물류환경에서는 RFID 태그를 화물의 이동에 적용하였고, 물류거점에 설치된 RFID 리더기를 통해 태그가 부착된 화물의 통과 정보를 자동으로 인식하여 위치정보를 제공하였다. 하지만, 글로벌 물류환경에서는 물리적인 리더기를 경로마다 설치하는데 막대한 비용이 발생하며 이를 해결하기 위한 방법으로 GPS 기능을 내장한 RFID 태그의 경도, 위도 좌표 데이터를 이용하는 것이 필요하다.
기존 해운물류의 GPS를 이용한 위치추적 연구에서는 화물의 이동정보를 경도, 위도 좌표로 표시할 뿐, 어느 물류거점을 언제 들어가고, 언제 나오고, 언제 통과하였는지에 대한 위치 정보를 잘 표현해 주지 않았다.
이러한 문제를 해결하기 위해 글로벌 해운물류환경에서 GPS 데이터를 이용한 소프트웨어적인 방법으로 위치를 신속하게 추적할 수 있는 시스템을 구현한 것이 이전 연구였었다[1]. 하지만, 이전 연구에서는 RFID 태그의 GPS 데이터를 이용하여 실시간 위치정보를 파악하는 것이 어렵고, 수신받은 GPS 좌표를 이용하여 세계적으로 분포되어 있는 수많은 물류거점을 신속하게 검색하는데 있어 미비한 부분이 있었다. 따라서, 이를 잘 해결할 수 있는 해운물류에서의 GPS 기반의 실시간 위치추적 시스템을 설계하고자 한다.
이 논문의 구성은 다음과 같다. 2장에서는 논문의 전반적인 이해를 돕기 위해 관련연구와 이전 연구의 해운 물류 위치추적 시스템의 문제점에 대하여 파악한다. 3 장에서는 전반적인 시스템 구조를 나타내고, 4장에서는 이 논문에서 제안하는 실시간 위치추적 알고리즘을 제시한다. 마지막으로 5장에서는 본 논문의 제안하는 바를 요약하고 결론을 맺는다.
RFID를 통하여 적재한 물품의 수량과 제품정보, 배송상태, 분실여부 등 물품을 관리하고, 차량이 이동하면 GPS로부터 위치정보를 수신받아 차량에 적재한 물품의 실시간 위치정보, 유통경로, 생산지 등의 정보를 Google map과 연동하여 물품 유통과정을 웹의 위성지도를 통하여 관리하는 연구가 있었다[2]. 항내 컨테이너 야적장에서 컨테이너의 효율적인 관리를 위하여 GPS 를 이용한 위치추적기법 및 무선데이터 통신기법을 이용하여 차량의 위치를 인터페이스 모듈을 통해 지도로 확인할 수 있는 연구가 있었다[3]. 또한 운송차량에 대하여 GPS를 이용하여 위치를 측정하고 오차의 문제점을 보완하여 위치측정의 정밀도를 향상시킨 방법으로 DGPS를 결합하여 전자지도에 이동체를 표시하는 방법을 제시한 연구가 있었다[4]. GPS가 내장된 RFID 리더기, 위치정보를 서비스하기 위한 네트워크 서비스 시스템으로 구성되며, 개발된 리더기는 태그의 위치정보 획득뿐만 아니라 TCP/IP를 이용한 고속전송 및 웹 서버의 기능을 갖추어 사용자가 웹 브라우저를 통해 리더기의 데이터를 조회할 수 있도록 하는 연구가 있었다[5]. 위의 연구에서는 화물의 이동정보에 대하여 경도, 위도의 한 점으로 표시할 뿐 어느 물류거점을 언제 들어가고, 언제 나오고, 통과하는지에 대한 동적인 위치 정보를 잘 표현해 주지 않았다.
실내 위치측위를 위해 RFID 기반의 RTLS 태그를 부착하여 정보를 파악하고 실외 측위시 GPS를 이용해 사물의 위치를 실시간으로 모니터링하는 시스템을 구축하는 연구가 있었다[6]. 이는 GPS가 실외 환경에서만 사용될 수 있고 실내에서 사용하더라도 그 오차 범위가 너무 크다는 문제점으로 RTLS 기반으로 GPS를 이용 하여 위치를 추적하는 연구이다. 이 또한 위의 연구들처럼 GPS를 이용한 위치를 지도에 한 점으로 표시할 뿐 특정 장소에 대한 동적인 위상 형태를 보여주지 않는다.
해운물류에서의 실시간 위치추적에 관한 연구로는 항만 터미널내에서 항만 물류의 위치파악을 위해 RTLS의 프로토콜, 측위 기법, 보정 기법을 다루고 성능 평가를 제시한 형태가 있었다[7]. GPS가 아닌 RTLS (Real Time Locating Systems)를 이용하여 객체나 사물에 태그를 부착하여 실시간으로 위치를 추적하고, 글로벌 해운물류가 아닌 항만 물류에 국한된 연구였다.
우리가 연구한 위치추적 시스템은 단거리 또는 항만과 같은 제한된 범위를 뛰어넘어 글로벌한 해운물류의 화물 이동정보를 알고자 한다. 해운물류에서 주요 물류 거점 공간인 컨테이너 터미널, 해역, 항만, 도로, ICD 등을 공간데이터로 표시하고 GPS 좌표를 이용하여 위치를 추적하는 시스템이다. 주요 물류거점에 대하여 안에 있고(‘IN’), 바깥에 있고(‘OUT’), 언제 들어오고 (‘INTO’), 언제 나오고(‘OUTOF’), 통과하였는지 (‘THROUGH’)에 대한 위상관계를 표현한다. 특히, 이동체가 어느 물류거점을 언제 들어갔는지(‘INTO’) 또는 나왔는지(‘OUTOF’) 또는 통과하였는지(‘THROUGH’) 의 위치 변화정보를 ‘Spatial Event’로 정의한다.
이전 위치추적 시스템에서는 GPS 데이터를 일정시간 단위로 받아 화물의 물류거점에 대한 Spatial Event 를 체크하여 ‘INTO’, ‘OUTOF’, ‘THROUGH’를 생성하였다. 이러한 상황에서는 위치변화가 특정시점에 발생하더라도 RFID 태그가 일정 시간을 기다려 단위시간 별로 GPS데이터를 송신하기 때문에 발생시점의 Event 감지를 놓치는 경우가 발생한다. 즉, 실시간 Spatial Event를 인지하기 어려운 문제점이 발생한다.
그리고, Spatial Event 생성을 알아내기 위해 수신받은 태그 데이터의 현재 위치에 대하여 제일 가까운 물류거점을 DB의 Table에서 탐색해야 한다. 여기서, 제일 가까운 물류거점을 찾아내는 데에 어려움이 발생한다. 특히 글로벌 환경에서 해당 물류거점을 찾아내기 위해 모든 물류거점을 순차적으로 탐색하는 데에는 시간이 많이 걸린다. 또한 위치변화가 발생할 때마다 데이터베이스로부터 대량의 물류거점 데이터를 읽어서 공간연산을 해야 한다. 이를 해결하기 위한 방법으로 빠른 속도의 위치 검색을 위해 물류거점의 일정지역을 그룹화 시켜서 R-tree 인덱스를 적용한다[8]. 이전 연구에서 R-tree 인덱스 적용에 관한 상세한 위치 탐색 작업이 미비하여 추가적인 연구가 필요하다.
따라서, 이 논문에서는 해운 물류에서의 위치추적에 관한 지금까지 연구를 바탕으로 제시된 문제점인 실시간 위치추적이 가능한 Spatial Event 생성 알고리즘을 제안하고, R-tree 인덱스 기반의 최근접 물류거점 탐색 알고리즘을 제안한다.
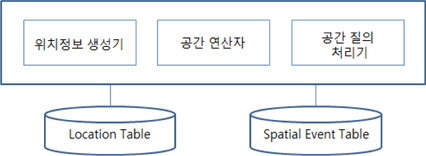
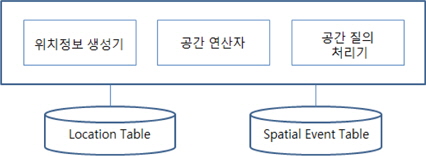
위치추적 시스템은 [그림 1]과 같이 위치정보 생성기, 공간 연산자, 공간질의 처리기, Location Table, Spatial Event Table 등의 구성요소를 포함하고 있다.
화물 이동체와 물류거점 위상관계를 이동체가 공간에 포함되는 관계인 ‘IN’, 이동체가 공간에 포함되지 않는 관계인 ‘OUT’, 이동체가 공간에 포함되지 않은 상태에서 포함되는 관계인 ‘INTO’, 이동체가 공간에 포함된 상태에서 포함되지 않는 관계를 나타내는 ‘OUTOF’, 이동체가 공간에 포함되지 않은 상태에서 포함되었다가 포함되지 않는 관계를 나타내는 ‘THROUGH’ 의 5가지 형태로 구분하여 공간연산자를 설계하였다. 이동체가 어느 물류거점을 언제 들어갔는지(‘INTO’) 또는 나왔는지(‘OUTOF’) 또는 통과하였는지(’THROUGH’)의 위치 변화정보를 ‘Spatial Event’로 정의한다.
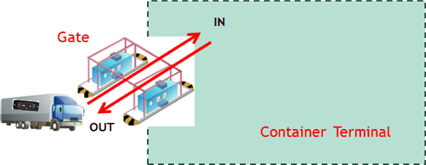
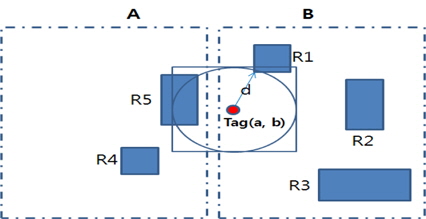
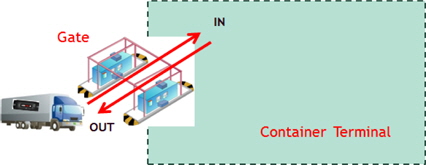
해운물류 환경에서는 일반적인 공간 위상관계와 특수한 공간 위상관계를 해결할 수 있는 두 가지 타입의 공간 연산자가 필요하다. 특수한 위상관계란 해운물류에서 Gate가 있는 공간의 경우 특정 Gate를 통과해야만 ‘IN’의 위상관계를 만족하는 경우(컨테이너 터미널, ICD, 항만)가 있다[그림 2]. 반면 도로, 해역과 같은 공간은 Gate가 없고 단순하게 일반적인 공간관계에 의해 위상관계가 정해진다. 특히, 앞의 위상문제를 잘 해결할 수 있는 공간연산자를 설계하여야 글로벌 해운물류환경의 위치추적을 잘 처리할 수 있다.
‘Spatial Event Table’은 ‘위치정보 생성기’를 통하여 생성된 Spatial Event를 저장함으로써 물류이력 정보를 모아놓게 된다. 릴레이션 스키마는 태그번호, 컨테이너번호, 일시, 위치코드, 위치이벤트와 같은 속성정보를 포함한다.
‘Location Table’은 해운물류상의 주요 물류거점에 관련한 일반 속성정보가 저장된다. Gate를 통과해야 하는 공간영역은 Gate의 네 점 좌표와 Gate의 방향을 나타내는 ‘dir’(Direction)속성을 가진다. 릴레이션 스키마는 위치코드, 위치명, 위치타입, 좌표1, 좌표2, 좌표3, 좌표4, 방향의 속성정보를 포함한다.
위치정보 생성기는 사용자의 위치추적에 관한 질의를 쉽게 처리하기 위하여 화물의 물류거점에 대한 Spatial Event를 감지, 생성하여 DB에 저장한다.
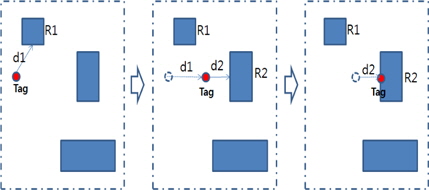
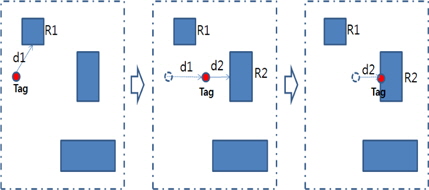
먼저 수신된 RFID 태그의 GPS좌표 데이터를 읽어서 태그와 제일 가까운 거리에 있는 물류거점 R1을 탐 색하고 최단 거리 d1을 구한다[그림 3]. 위치정보 생성기는 태그가 거리 d1만큼 이동하면 태그에게 새로운 GPS 좌표를 보내달라고 요청한다. DB에 물류거점에 대한 각 위치데이터를 저장해 놓고 현재의 태그 좌표에서 가장 가까운 물류거점을 찾아서 진입하는지 (‘INTO’), 통과하는지(‘THROUGH’), 밖으로 나오는지 (‘OUTOF’)의 이벤트를 감지하는 데에 일정 시간 단위로 태그 데이터를 수신하는 것이 아니라, 일정 거리 단위로 이동하면 수신한다. 태그가 일정거리만큼 이동하고 데이터를 보내오면 새로운 태그 좌표를 가지고 공간 연산을 실행한다. Spatial Event 발생여부를 확인했을때 결과가 False가 나오면 최근접 물류거점에 대한 Spatial Event가 발생한 것이 아니기 때문에 현재 GPS 좌표를 기준으로 새로운 최근접 물류거점 R2를 찾아내고 최단거리 d2를 확인한다. 다시 태그에게 최단거리 d2만큼 움직이면 태그의 GPS 데이터를 보내달라고 요청하게 된다. 같은 과정으로 R2 물류거점에 대하여 Spatial Event 확인을 위한 ‘INTO’ 공간연산을 실행해서 True가 나오면 결과를 저장한다.
이와 같이 일정거리만큼 움직여서 이동했을 때 태그가 GPS 데이터를 보내고, 공간연산을 실행하기 때문에 특정시점에서 일어난 Spatial Event를 발생 순간에 감지할 수 있게 된다.
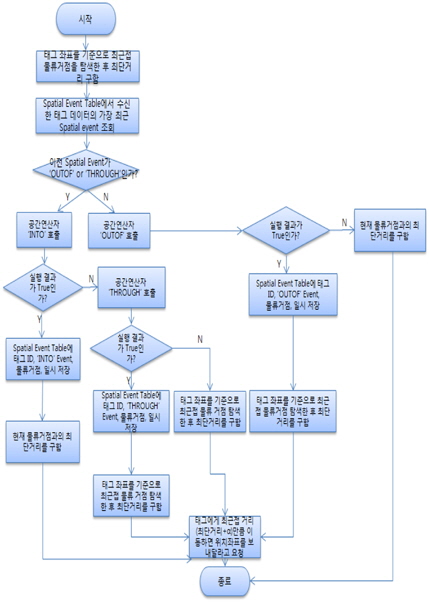
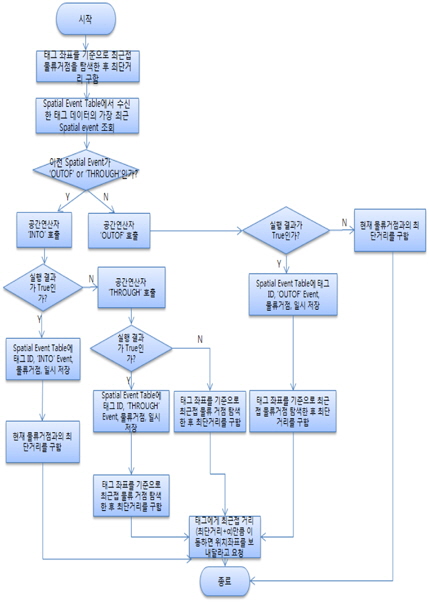
위치정보 생성기의 Spatial Event 추출에 대한 구체적인 내용은 다음과 같다.
먼저 태그가 센싱된 정보를 위치추적 시스템에 전송한다. 위치정보생성기는 화물의 GPS데이터 (경도, 위도)를 읽어오고 태그 위치에서 가장 가까운 물류거점을 미리 저장된 Location Table에서 조회한다. 그리고, 해당 태그의 이전 Spatial Event가 있는지 조회한다. 조회한 결과 Spatial Event로 ‘INTO’가 있는 경우에는 다음 에 생성될 Event는 ‘OUTOF’이고, Spatial Event로 ‘OUTOF’ 또는 ‘THROUGH’가 있는 경우에는 다음에 생성될 Event는 ‘INTO’ 또는 ‘THROUGH’이다. 이를 바탕으로 이전 Event에 ‘OUTOF’가 있으면 최근접 물류거점에서 ‘INTO’가 발생했는지를 조사한다. 이전 Event가 ‘INTO’인 경우에는 공간 연산자 ‘OUTOF’를 호출하고, 연산결과가 True이면 Spatial Event Table에 결과를 저장한 후, 태그 좌표를 기준으로 최근접 물류 거점을 탐색한 후 최단거리를 구한다. 그리고, 태그에게 최단거리만큼 이동하면 태그 좌표 데이터를 보내달라고 요청한다.
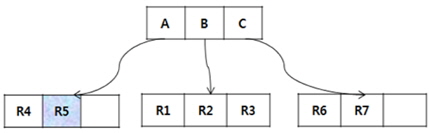
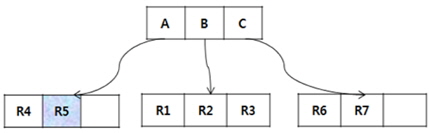
Spatial Event를 생성하기 위해서는 현재 태그 위치에서 가장 가까운 최근접 물류거점을 미리 저장해놓은 물류거점 Location Table에서 빨리 검색할 수 있어야 한다. 먼저 모든 물류거점에 대하여 가까운 지역에 있는 거점들을 그룹화시켜 R-tree 인덱스를 구축한다. 그룹화된 공간 물류거점들을 포함한 가장 작은 사각형을 MBR(Minimum Bounding Rectangle) 이라고 한다. [그림 5]의 A노드의 MBR 은 R4, R5의 공간 객체가, B노드의 MBR은 R1, R2, R3의 공간 객체가 포함되어 있다. 태그 좌표가 포함된 공간 물류거점을 조회할 때에는 루트로부터 단말 노드로 트리를 탐색해 내려가 검색 영역에 들어오면, 단말 노드에 속한 공간 객체 중에서 검색 거점인지를 탐색하게 된다. 즉, GPS 좌표가 포함된 단말 노드의 공간 물류거점 객체들 중에서 조회하려는 공간 객체를 탐색하여야 한다.
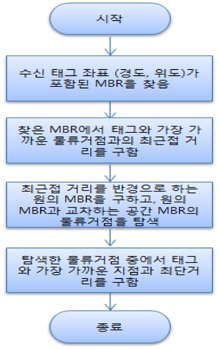
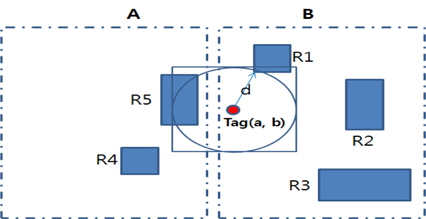
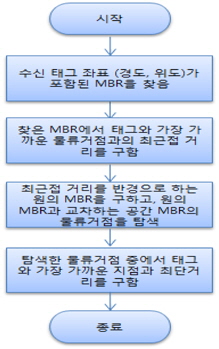
그런데, [그림 6]에서 보는 것처럼 B노드 MBR안에 태그 좌표가 포함되어 있지만 이웃 A노드 MBR의 R5 공간 객체에 대하여 찾고자 하는 최근접 물류거점이 나타나는 경우가 발생할 수 있다. 이러한 문제를 포함하여 최근접 물류거점을 탐색하는 방법은 다음과 같다. 먼저 수신 태그좌표 (경도, 위도)가 포함된 MBR을 찾는다. 찾은 MBR에서 태그와 가장 가까운 물류거점 R1과의 최단거리 d를 구하고, d를 반경으로 하는 원의 MBR을 구한다. 원의 MBR과 겹치는 이웃 노드 MBR 을 검색하고, 그 안에 포함된 모든 물류거점 공간 객체와의 최단거리를 구한다. 그래서, BMBR의 R1과의 최단거리 d와 이웃 노드 A MBR에 포함된 물류거점들 중 태그와 가장 가까운 공간객체 R5와의 최단거리를 비교하여 작은 값을 가진 물류거점을 최근접 물류거점으로 결정한다.
이를 순서도를 통해 단계별로 나타내면 다음과 같다.
이로써 글로벌 물류거점 데이터베이스에 저장되어 있는 모든 공간데이터를 순차적으로 읽어서 탐색하는 것이 아니라 검색하고자 하는 물류거점을 빨리 찾아낼 수 있다. 뿐만 아니라 화물의 공간 이동변화에 따른 Spatial Event 생성을 발생시점 순간에 감지함으로써 실시간적인 위치추적을 처리할 수 있도록 알고리즘을 설계하였다.
기존의 리더기를 통해 위치를 파악하던 RFID 시스템보다 확장성과 이동성이 제고된 GPS 기반 좌표를 이용하여 실시간으로 위치를 추적하는 시스템을 제안하였다. 기존 GPS 기반의 논문에서는 글로벌 해운 물류 화물의 이동정보에 대하여 경도, 위도의 한 점으로 표시할 뿐 특정 물류거점을 들어가고, 나오고, 통과하는지에 대한 동적인 위상관계를 나타내 주는 연구가 없었다.
본 논문에서는 해운물류 분야의 특수한 공간 위상문 제를 해결하는데 적합한 공간연산자, 위치정보 생성기 등을 포함한 글로벌 해운물류 위치추적시스템에 관한 연구를 바탕으로 미비한 문제점을 해결하고자 하였다. 기여점은 물류거점의 진입, 통과, 이탈에 관하여 발생 시점의 실시간 위치추적이 가능하고, 현재 태그의 위치를 기점으로 글로벌 물류거점에 대한 위치추정을 신속하게 파악하는 알고리즘을 제안하였다는 것이다. 이는 물류관리를 위한 물류가시성을 증가시키고, 나아가 위치추적에 대한 질의를 신속하게 처리하는데 기여할 것이다.
향후 연구로는 글로벌 해운 물류거점 DB를 구축하고 본 논문에서 제안한 알고리즘을 기반으로 GPS 기반 위치추적 시스템을 구현하여 성능을 평가하는 것이다. 즉, 위치이벤트 발생에 따른 실시간 위상관계 추적과 글로벌 물류거점 위치 추정의 처리시간을 평가하는 것이다.