In this study, in order to improve and optimize the performance of the turning mechanism for a fish robot in the fluid, we propose the tail joint trajectories using neural networks to mimic the CST(C-shape Sharp Turn) patterns of a real fish which is optimized in the natural environment. In order to mimic the CST patterns of a fish, we convert the sequential recording CST patterns into the coordinate data, and change the numerical coordinate data into a functions. We change the motion functions to the relative joint angles which is adapted to suit robot's shape and data. However, these relative joint trajectories obtained by the sequential recording of the carp have low-precision. It is difficult to apply to the control of a fish robot. Therefore, the relative joint trajectories are interpolated using neural networks with superior generalization ability and applied to the fish robot. we have found that the proposed method using neural networks is superior to ones using high-order polynomial equation through the computer simulations.
유체 내에서 추진체에 관한 연구는 주로 프로펠러에 의한 추진력에 한정되어 연구되었으며, 추진체의 방향 전환은 주로 키(key)를 사용하여 키의 구조적인 메커니즘에 초점을 맞추어 연구가 진행되었다. 그러나, 유체내에서 가장 최적화된 형태를 갖고 효율적인 메커니즘을 사용하는 것은 물 속 생물체 일 것이다. 그들은 자연 환경에 오랜 시간 동안 어려운 문제를 극복하고 진화하여 현재의 형태와 동작 메커니즘이 최적화되어 있다고 할 수 있다. 그러므로 생물체의 구조와 특성, 동작메커니즘을 모방하여 수중 로봇에 적용하면 로봇의 제어 성능을 개선할 수 있을 것이다[1].
물고기의 유영 패턴 중 BCF(BCF : Body and Caudal Fin)형 유영 패턴에는 반복적인 파동으로 전진하는 직진 유영 패턴과 굽힘의 정도에 따라 방향 전환 및 빠른 방향 전환(CST: C-Shape Sharp Turn) 패턴 등이 있다. 직진 유영 패턴에 관한 연구는 생물학자 Lighthill[2]이 정의한 모션 함수를 이용하여 물고기 로봇의 관절 궤적에 적용하는 연구가 많았고[3,4], Spierts[5] 등의 실제 잉어의 CST 모션을 순차적으로 기록한 결과를 모사하여 구한 모션 함수를 일반화하여 물고기 로봇에 적용한 사례가 있다[1,6,7]. 그러나 제안된 CST 모션 궤적 함수들은 단순히 CST 모션의 동작을 직관적인 관찰을 통하여 함수를 선정하거나, 물고기의 굽힘 동작 특성이 물고기 로봇의 중심으로부터 원운동과 유사하다고 간주하여 원운동의 중심 궤적을 사용하여 관절 함수를 결정하였다. 이러한 실험 결과는 실제 잉어의 CST 모션 결과와 매우 다르며, 단지 물고기 로봇이 회전한다는 결과만을 도출하고 있습니다.
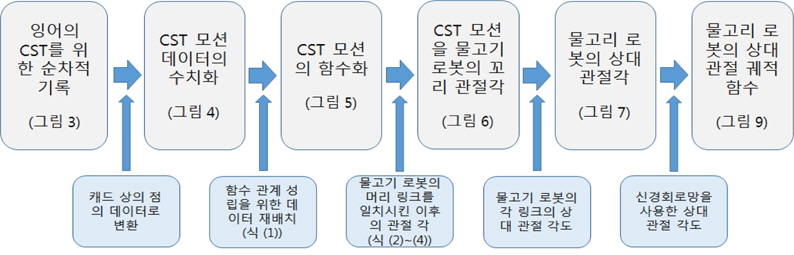
따라서 본 연구에서는 유체 속에서 빠르고 효율이 높은 BCF형 물고기인 잉어의 빠른 방향 전환 모션에 관한 순차적인 기록을 통하여 물고기 로봇의 관절 궤적 설계에 적용하고자 한다. 물고기 로봇의 CST 모션 궤적 설계는 물고기의 순차적 기록을 수치화하고, 수치화된 모션 데이터를 보간법(interpolation)을 사용하여 함수화한다. 또한 함수화된 모션 함수를 물고기 로봇에 적용하기 위해서는 상대 관절각으로 변환하여야 한다.
그러나 이렇게 구해진 상대 관절 궤적은 잉어의 순차적 기록(순차적 시간 간격: 10(
고차 다항식에 의해 보간 방법은 고차 다항식의 차수의 선정이 어려웠으며, 가장 적절하게 선정된 차수를 사용한 궤적 제어 결과 실제 물고기의 방향 전환 모션의 순차적 기록과도 차이가 많음을 알 수 있다. 그러나 신경회로망을 이용하여 보간한 상대 관절 궤적 함수는 실제 물고기의 방향 전환 모션의 순차적 기록과 거의 일치함을 모의실험으로 확인하였다.
자연에 존재하는 물고기 종의 수가 다양한 만큼 유영하는 방법도 다양하다. 그 중에서도 대부분의 물고기가 BCF형 유영이고 그 중 70%는 Carangiform이다[3]. BCF형 유영을 세부적으로 분류하면 직진, 방향 전환, 빠른 방향 전환(CST: C-shape Sharp Turn) 등으로 분류할 수 있다. 이러한 분류를 통해 물고기의 유영 패턴에 대한 물고기 몸체 동작을 독립적 함수로 표현이 가능하다[1]. 본 연구에서는 대표적인 Carangiform형태의 물고기를 모사하여 물고기 로봇을 모델링하고 물고기가 CST의 몸체 동작 함수를 물고기 로봇의 각 관절 궤적 함수에 적용하고자 한다.
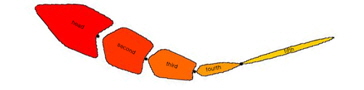
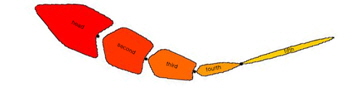
그림 1은 물고기 등뼈를 기준선으로 위에서 아래로 바라보는 방향으로 물고기 로봇을 구현하고, 머리 1개와 꼬리 관절 4개로 구성하여 물고기 로봇의 형상을 모델링하였다.
물고기 로봇이 동작할 때 물고기 로봇의 몸체를 표현하기 위해 물고기 로봇 머리의 무게중심으로 좌표축을 정의한 몸체 좌표계를 설정하여 나타내고, 물고기 로봇의 꼬리 관절각을 표현하기 위하여 꼬리 관절 좌표를(
강체로 구성된 다관절 물고기 로봇이 유체 내에 완전히 잠겨 있는 상태에서 유체와 물고기 로봇에 작용하는 힘의 관계는 정수역학적 힘(hydrodynamic force)과 중력 등의 역학적인 관계를 고려해야 한다.
본 연구에서는 유체 내에서의 물고기 로봇의 회전과 관련한 모의실험, 분석 등을 위한 일련의 작업을 쉽게 가능하도록 BHT(BHT : Biohydrodynamics Toolbox)를 이용하였다. BHT는 고체역학(solid mechanics)과 유체역학(fluid mechanics)의 상호작용에 대해서 해석이 가능하도록 기능 및 환경이 제공되므로 유체 내에서의 물고기 로봇에 대한 추력 및 모션 등의 연구를 보다 쉽게 할 수 있다[8].
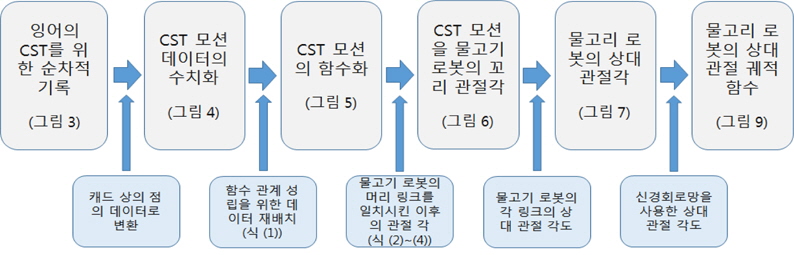
Carangiform형 물고기는 진행하는 방향을 바꾸기 위해 시간에 따른 몸체의 굽힙 정도에 따라 방향 전환과 빠른 방향 전환(CST: C-shape Sharp Turn)의 패턴으로 구분할 수 있다. 그 중에서 CST에 관한 기존의 연구는 잉어의 CST를 순차적으로 기록한 자료를 수학적 해석 방법을 이용해 CST 궤적 함수를 모사하여 제안하였지만 함수가 복잡하고 관련 파라메터들의 설정이 어렵다[6]. 또한 CST를 자세하게 관찰하여 직관적인 해석에 의한 단순한 함수 형태로 일반화한 방법은 함수는 단순하나 정확한 모션을 구현하지는 못했다[7]. 따라서 본장에서는 기존의 연구와는 다른 방법으로 그림 3과 같이 순차적으로 기록된 CST 모션을 캐드 상의 점의 데이터로 수치화하고, 수치화된 모션 데이터를 함수로 유도하기 위하여 데이터를 재배치를 행한 후, 보간법을 사용하여 함수화하였다. 또한 함수화된 모션 함수를 물고기 로봇에 적용하기 위해서는 상대 관절각으로 변환하고, 제어의 정밀도를 높이기 위하여 상대 관절각을 신경회로망 보간법을 사용하여 상대 관절 궤적 함수로 설계하였다.
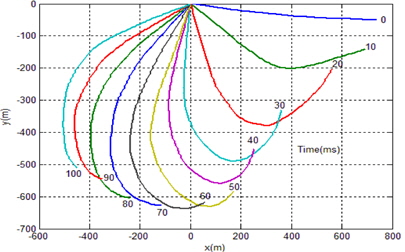
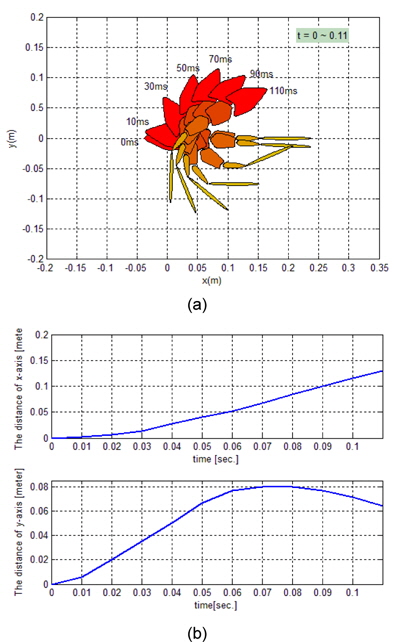
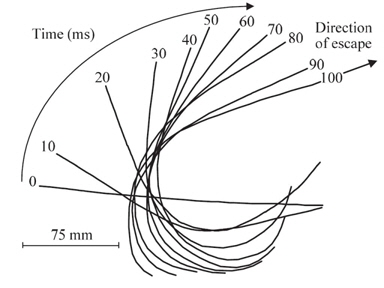
CST는 짧은 시간에 각 관절의 굽히는 동작을 크게하고 이후 서서히 펴는 동작에 따라 추진력에 변화가 생김으로써 몸체의 진행 방향을 변화시킨다. 따라서 시간에 대한 각 관절의 동작은 매우 중요한 요소이다. 그림 4는 잉어의 CST 유영을 잉어의 등뼈를 기준선으로하여 10(
그림 4에서 잉어가 0(
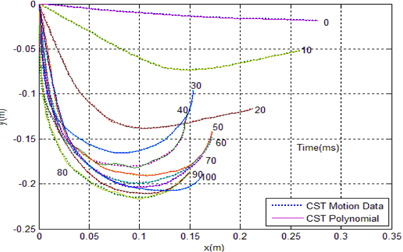
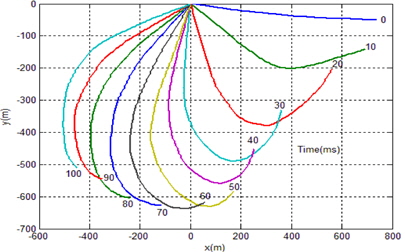
따라서 잉어의 CST를 위한 순차적 기록과 같이 물고기 로봇이 움직이기 위해서는 각 관절의 상대 관절 각을 구해야 한다. 그러기 위해서는 잉어의 CST를 위한 순차적 기록으로부터 데이터로 추출하여야 한다. 그림 5는 이러한 CST 패턴들을 캐드 상의 점의 데이터로 변환하여 이를 좌표 데이터로 수치화하였다. 물고기 로봇의 관절 모션을 만들기 위해서는 좌표 데이터를 기초한 모션 함수를 만들어야 한다. 그러나 그림 5에서 30(

단,
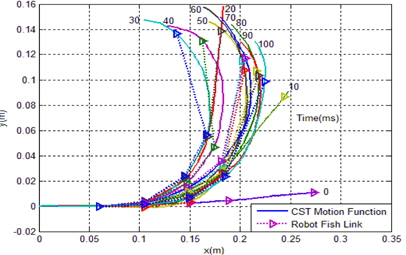
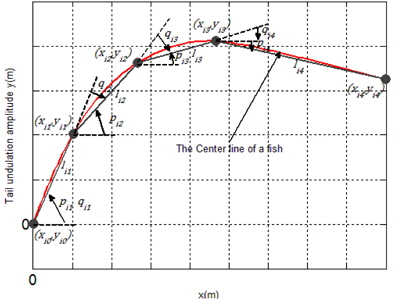
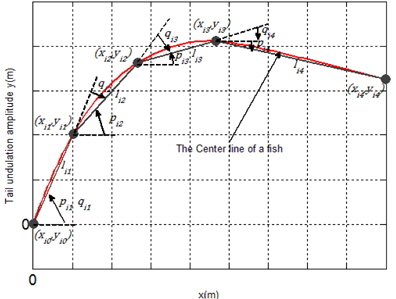
3.1절에서 구한 물고기의 CST 모션 함수를 이용하여 물고기 로봇의 CST 모션을 위한 각 꼬리 관절 상대 각도를 구하고자 한다. 물고기 로봇의 각 링크의 시작점과 끝점은 물고기의 CST 모션 함수 위에 존재하고 다관절로 구성되어 있는 물고기 로봇의 링크들은 강체이므로 시간에 따른 각 링크의 위치를 식 (2)와 같이 표현 할 수 있다[7].

단, , ,
따라서 물고기 로봇의 관절각의 정의에 의하여 식 (3)을 만족해야하며 식 (4)와 같은 제약조건을 갖는다.


CST 모션 함수가 0(
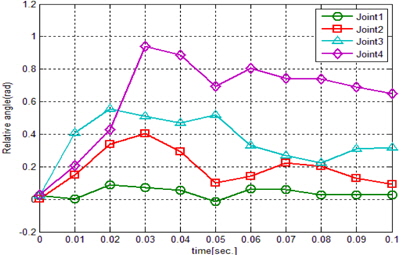
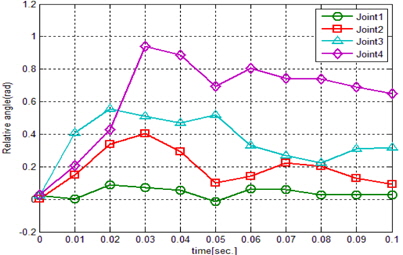
그림 7은 앞서 정의한 그림 2의 관절각의 정의에 의한 물고기 로봇 관절의 상대 관절 각도를 구하여 CST 모션을 위한 물고기 로봇의 상대 관절 각을 나타내었다. 물고기 로봇의 머리 부분인 첫 번째 링크를 제외한 각 관절의 상대 관절 각을 표시하였다.
그림 8에서 잉어의 순차적 기록에 의해 구해진 상대 관절 궤적은 순차적 기록 데이터의 시간 간격이 길어 물고기 로봇의 정밀한 제어에 적용하기 어렵다. 따라서 로봇의 정밀한 제어를 위해서 더 짧은 샘플링 시간의 데이터가 필요하다. 그러므로 위에서 구한 상대 관절 궤적을 함수로 보간하여 적용하고자 한다. 상대 관절 궤적의 보간은 일반적인 고차 다항식에 의한 보간과 일반화 기능이 뛰어난 신경회로망을 사용하여 보간한 방법을 비교하였다. 보간에 앞서 물고기의 CST 모션은 물고기가 멈춰 있다가 빠르게 회전하는 모션으로 간주하여 초기의 각도, 각속도, 각가속도를 모두 0으로 가정하였다. 이는 물고기 로봇의 모의실험 시에도 각 관절 궤적 함수의 초기 값이 매우 중요하다. 따라서 그림 8의 각 관절의 상대 각도만을 가지고 함수를 근사할 경우, 초기 각속도와 각가속도를 짐작할 수 없다. 그러므로 물고기가 잠시 멈취 있다가 CST 모션 운동을 한다고 가정하여 모든 링크에 새로운 위치 초기값 (0,0)을 첨가하여 근사함수를 구하였다.
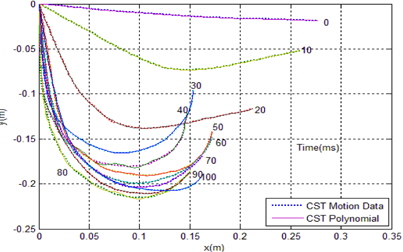
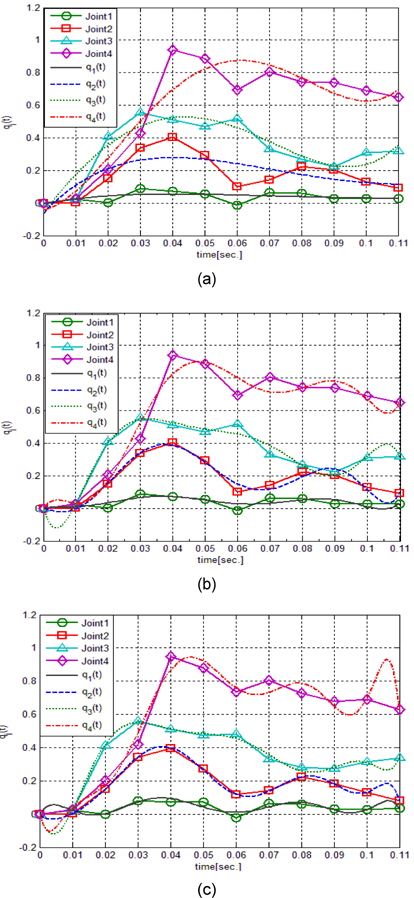
물고기 로봇 꼬리의 상대 관절 궤적 함수를 위하여 고차 다항식을 적용하였다. 고차 다항식의 차수는 데이터의 변곡점 등을 고려하여 낮은 차수에서부터 적용하여 가장 적절한 차수를 선정하였다. 본 연구에서는 3차부터 12차까지의 각각의 차수에 대해서 고차 다항식을 구하였다. 그림 9는 3차부터 12차 고차 근사 함수 중 4, 7, 12차 다항식으로 근사한 물고기 로봇의 상대 관절 궤적을 나타내었다. 차수가 높아짐에 따라 실제 궤적 데이터에 대해 높은 정확도를 보이나, 차수가 너무 높을 경우, 과보간(over-fitting)이 되는 단점이 있다.
신경회로망의 네트워크는 다층 퍼셉트론(multi-layer perceptron)을 사용하고 입력 데이터는 시간, 출력 데이터는 로봇의 상대 관절 각도를 사용하였다. 은닉층은 2층으로 각각 10개의 신경소자를 사용하여 역전파 학습 알고리즘을 이용하였다. 학습반복횟수(epochs)는 311회이며, RMS(Root Mean Square) 오차는 1.278 × 10-4이다.
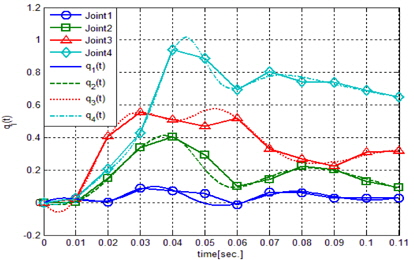
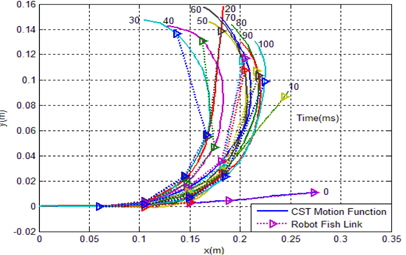
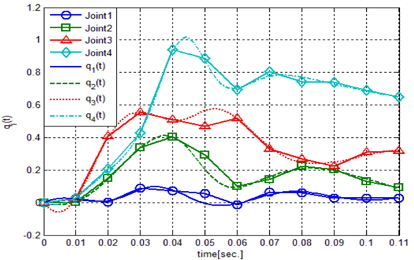
그림 10은 신경회로망을 이용하여 구한 물고기 로봇의 CST 모션을 위한 상대 관절 궤적이다. 그림 9의 고차 다항식으로 근사한 방법에 비하여 상대 관절 궤적이 실제 데이터 궤적을 정확하게 근사하고, 실제 데이터들 사이의 궤적은 부드럽게 근사됨을 확인 할 수있다.
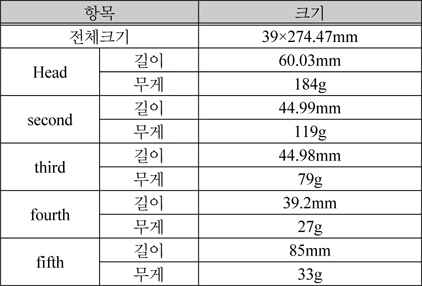
고차 다항식과 신경회로망으로 보간한 상대 관절 궤적을 물고기 로봇의 관절 궤적에 적용하여 모의실험 결과를 확인하고자 한다. 모의실험에 사용될 로봇은 그림 1과 같이 구성하고 물고기 로봇 몸체에 대한 제원은 표 1과 같이 정의하였으며, 샘플링 시간은 1(
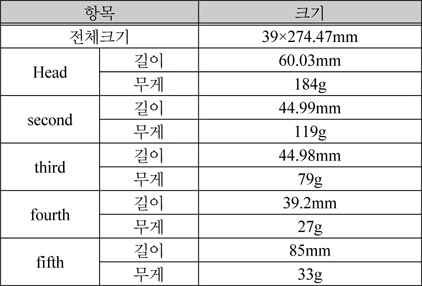
물고기 로봇 제원
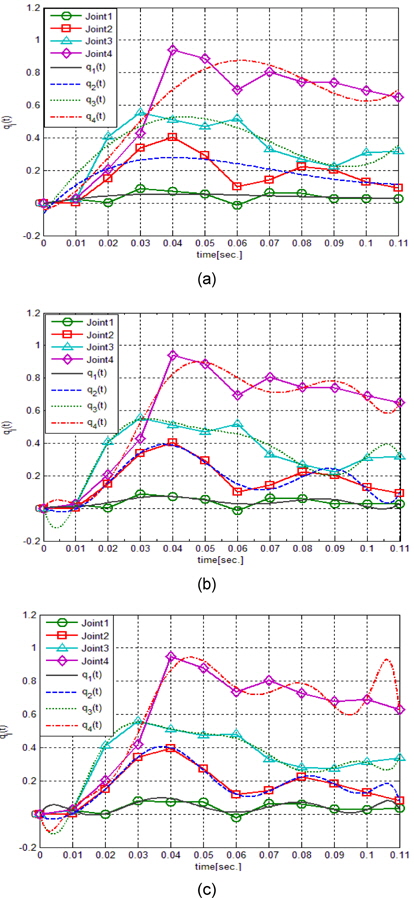
그림 11은 CST 모션을 위한 물고기 로봇의 상대 관절 궤적을 그림 9와 같이 4, 7, 12차 다항식으로 함수화 한 후, 물고기 로봇의 궤적 제어에 적용한 결과이다.
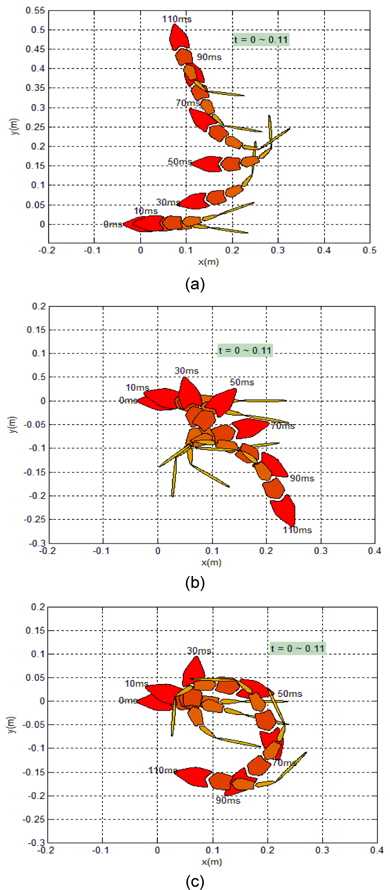
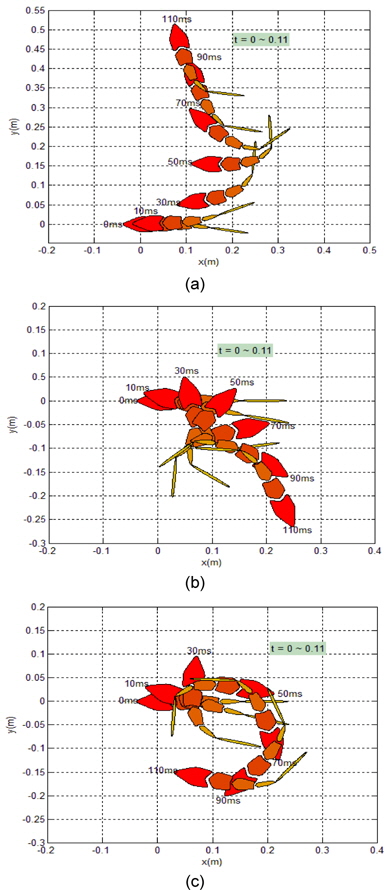
그림 11-(a)는 4차 다항식으로 근사된 궤적 제어 결과로 그림 3의 빠른 방향 전환을 위한 순차적 기록과 비교하여 전혀 다른 제어 성능을 나타내었다. 물고기 로봇의 상대 관절 궤적을 4차 다항식으로 근사하기에는 근사 함수의 파라메터가 많이 부족하여 실제 궤적 데이터들을 정확하게 근사하지 못한 결과이다.
그림 11-(b), (c)는 7차와 12차 다항식에 의한 근사된 궤적 제어 결과로 모두 빠른 회전의 특징을 나타내고 있다. 그러나 그림 3의 잉어의 순차적 기록과 비교하면, 과도하게 빠르게 회전함을 알 수 있다. 7차나 12차 다항식으로 근사된 궤적함수는 4차에 비하여 실제 궤적 데이터를 더 정확히 근사하였으나, 근사된 실제 궤적 데이터들 사이가 과보간에 의해 근사 함수의 일반화 특징이 떨어짐을 보였다. 특히, 초기와 0.01초 사이의 보간 구간이 과보간되어 물고기 로봇의 동역학에 크게 영향을 미친 결과이다. 그러므로 고차 다항식으로 근사한 궤적의 차수는 반복 시행(trial and error)을 통하여 적절한 차수를 구하기 어려웠으며, 구해진 고차 다항식에 의한 제어 결과 역시 그림 5의 잉어의 순차적 기록과 비교하여 유사한 결과를 도출하기 어려웠다.
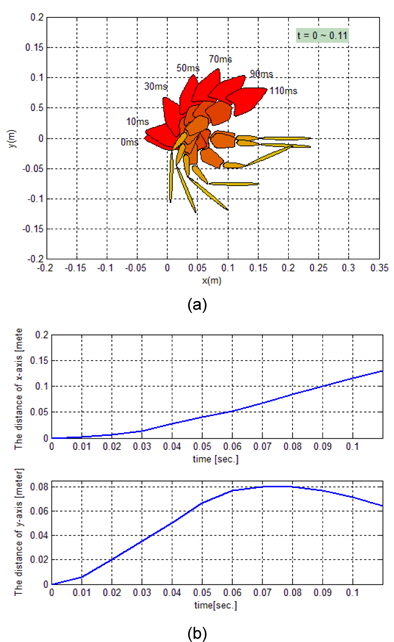
그림 12는 그림 10의 신경회로망 관절 궤적을 사용한 궤적 제어 결과이며, 그림 3의 CST 패턴을 위한 잉어의 순차적 기록과 매우 유사하게 회전함을 확인 할 수 있다. 그림 11의 고차 다항식으로 근사한 궤적 제어 결과에 비하여 매우 뛰어난 성능을 나타내며, 반복 시험을 통하여 더 좋은 성능을 도출할 필요도 없다. 이는 신경회로망의 일반화기능이 뛰어나 불완전한 데이터에 대하여 적절히 보간하여 데이터를 생성할 수 있기 때문이다. 모의실험 결과 신경회로망을 사용한 물고기 로봇의 상대 관절 궤적이 고차 다항식에 의한 궤적 제어 방법에 비하여 뛰어난 성능과 편리함을 알 수 있다. 그림 11-(b)는 물고기 로봇의 x, y축의 궤적을 표시하였다.
본 연구에서는 유체 속에서의 로봇의 방향 전환 메커니즘의 성능을 개선하고 최적화하기 위하여 물 속 자연 환경에 최적화되어 있는 물고기의 CST 패턴을 모방하여 물고기 로봇의 꼬리 관절 궤적을 신경회로망을 사용하여 제안하였다.
물고기의 CST 패턴을 모방하기 위해 CST 패턴을 순차적으로 기록한 정보를 수치적으로 변환하여 좌표 데이터를 생성하고 함수화하였다. 함수화된 모션 궤적 함수를 물고기 로봇의 상대 관절각으로 변환하였으나, 구해진 상대 관절 궤적은 잉어의 순차적 기록에 의해 구해진 각도이므로 분해능이 떨어져 실제 물고기 로봇의 제어에 적용하기 어렵다. 그러므로 상대 관절 궤적을 일반화 기능이 뛰어난 신경회로망을 사용하여 보간하고 물고기 로봇에 적용하였다. 모의실험을 통하여 신경 회로망을 이용한 상대 관절 궤적 함수가 고차의 다항식 궤적 함수에 비하여 물고기 로봇의 CST 모션에 더 좋은 성능을 나타냄을 확인하였다.

![잉어의 CST를 위한 순차적 기록[5]](http://oak.go.kr/repository/journal/13995/HOJBC0_2014_v18n3_510_f004.jpg)