This paper deals with the design method for a small waterproof 4-axis robot arm. An extensive analysis was performed on the torque applied to the robot joint as a result of the payload, as well as the design of the joint actuator capacity. In addition, a study was undertaken on the design of a waterproof joint actuator that works at depths greater than 10 m and the wiring design for a small waterproof connector to avoid obstructing the robot motion. Finally, a finite element method simulation was carried out to analyze the strength of the designed robot arm link, and its stability was verified through a simulation test.
최근 산업용 로봇 외에 생활지원, 위험물처리, 소방방재 등의 다양한 목적의 로봇들이 연구되고 있다. 이러한 로봇들은 고정된 작업을 하는 산업용 로봇들과 달리 실내외 환경에서 이동하며 감시나 정찰을 하는 작업을 하며 대표적인 로봇들로는 Packbot(Murphy, 2004), Remotec-andros robots(Frost et al., 2002; White et al., 1989), AZIMUT(Michaud et al., 2003)등이 있다. 이들은 이동하는 이동부와 작업을 하는 로봇 팔로 크게 나눌 수 있다.
이들 로봇은 이동부에 로봇팔을 부착하여 동작하므로 대체로 경량이며 자유도가 낮은 것이 특징이다. 집기와 놓기를 포함하는 유용한 동작가능한 로봇팔의 설계연구(Srinivasa et al. 2009)가 있다. 이 연구에서는 양팔로봇을 제작하여 감각을 가지며 물체를 다루는 연구를 하였다. 이외에도 로봇팔의 다양한 집기 및 놓기, 이송, 최적 자세에 대한 연구(Nilsson, 1969; Ambler et al, 1973; Lozano-Perez et al, 1987)들이 있다. 또한, 이동에 로봇팔을 사용하는 것에 대한 연구(Ben-Tzvi et al, 2008)와 안정된 카메라뷰를 얻기 위해 로봇팔을 설계한 연구(Kim et al, 2010), 경량화를 위해 탄소섬유강화 플라스틱을 이용하여 로봇팔에 대한 설계연구를 수행하였다(Kim et al, 2012). 또한, 말단에 부착한 카메라를 이용하여 취득한 비젼정보를 처리하는 연구도 수행되었다(Na et al, 2009).
이외에도 국내외에서 이동로봇용 로봇팔에 대한 많은 연구가 있으나 로봇팔의 설계에 대한 구체적인 연구가 없다.
본 논문은 화재나 홍수로 인하여 침수된 건물 내부를 탐사할 수 있는 방수형 소형 4축 로봇팔의 구체적 설계 방법에 대한 것이다. 침수된 좁은 극한 공간에서 다양한 임무와 탐사를 하는 경량의 이동 플랫폼의 탐사에 적합하도록 장착한 카메라를 설치할 수 있도록 4축 관절을 갖는 로봇팔의 구조를 설계하였다. 또한, 소형 경량화 설계를 통해 12kg의 부하를 감당하는 로봇팔의 설계를 위해 각 모터 축에 걸리는 부하토크에 대한 해석을 하였고, 부하에 대한 로봇관절에 대한 동역학적 부하해석과 이에 따른 관절구동기의 용량설계를 하였다. 설계 수심 10m 방수설계를 하였고 작업에 방해 및 걸림을 방지하기 위한 방수형 소형 커넥터를 설계 및 배선 설계를 하였다. 그리고 경량 로봇팔 링크설계를 위해 유한요소해석 시뮬레이션을 행하고 안정된 설계를 확인하고 및 검증하였다.
좁은 공간, 극한 공간에서 다양한 임무와 탐사를 하는 경량의 이동 플랫폼에 설치하기 위한 4축 로봇팔의 설계 조건은 다음과 같다.
(1) 가반하중 2kg, 총 무게 10kg 내외의 소형 경량 4축 구조 (2) 수심 10m에서의 탐사 및 작업을 할 수 있는 방수 설계 (3) 카메라의 동작반경을 극대화할 수 있는 관절 구조 (4) 로봇팔 동작에 방해가 되지 않도록 내부배선 설계 (5) 극한 환경에서 문제가 발생하여도 그 모듈만 교체할 수 있도록 모듈형 부품 설계
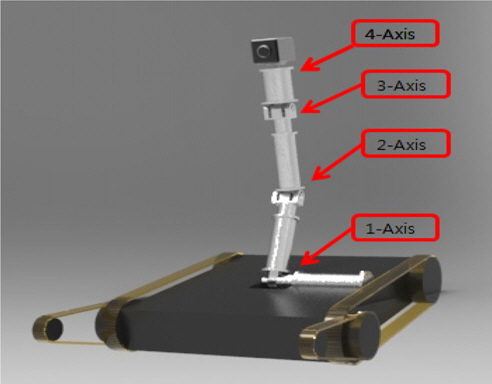
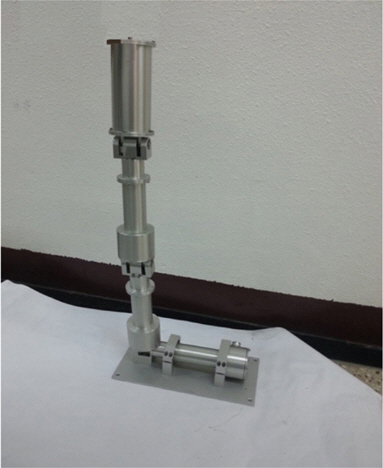
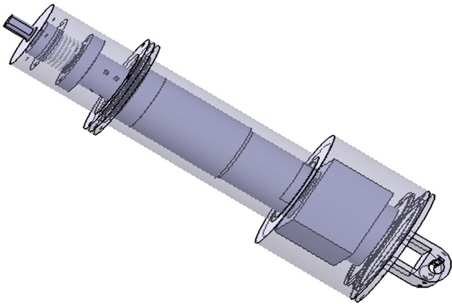
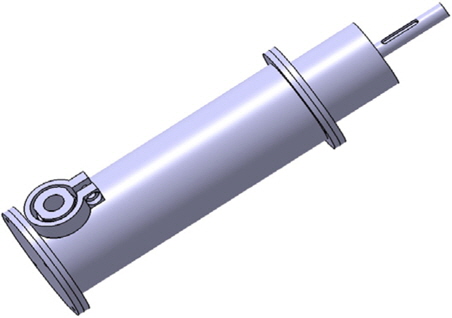
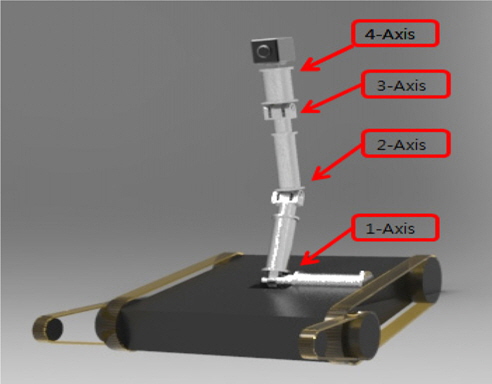
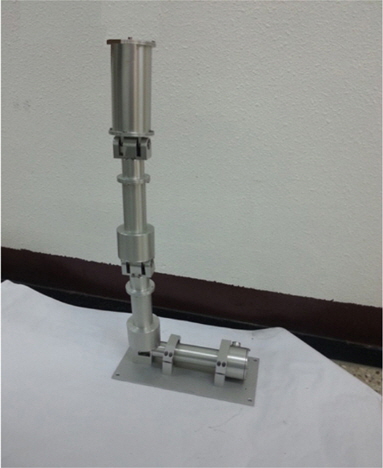
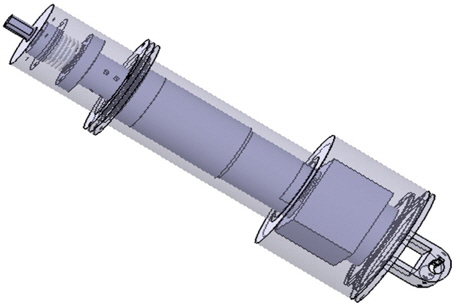
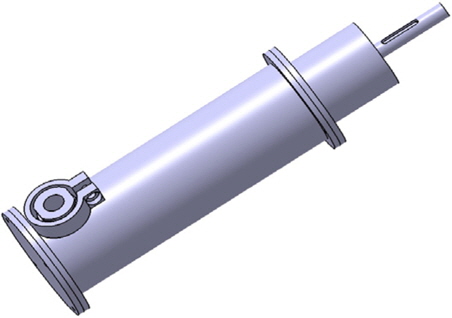
본 연구에서 상기와 같은 설계사양을 만족하기 위한 설계를 하였다. 로봇팔의 구조는 플랫폼과 결합하여 이동 시, 카메라의 탐사 공간을 최대한으로 하기위해 Fig. 1과 같이 Pitch-Pitch-Pitch-Yaw 관절구조를 설계하였다. 관절구동기는 Fig. 1과 같이 1축 Pitch 운동, 2축 Pitch 운동, 3축 Pitch 운동, 4축 Yaw 운동으로 각 4자유도로 구성되며 1, 2 및 3축의 관절구동기는 각각 ±70°동작가능하며, 4축은 카메라의 촬영이 용이하도록 360°동작 가능하도록 설계하였다. Fig. 2는 설계에 따라 제작한 로봇 팔의 사진이다.
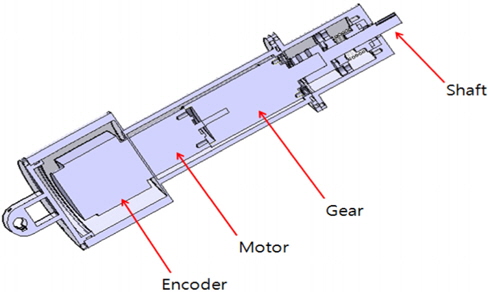
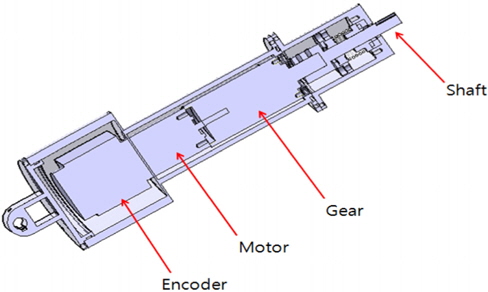
제약조건인 가반하중 2kg와 총 무게 10kg의 설계 사양에 부합하기 위해 모터 하우징 없이 구동모터의 코어를 로봇 링크 내에 직접 설치하도록 설계하고(Fig. 3), 모터를 설치한 링크가 최소의 직경을 갖도록 소형-경량화된 설계를 통해 방수형 4축 소형 로봇팔을 제작하였다. 각 모터 하우징을 포함하는 로봇 링크들의 중량은 각각 2.5kg, 2.5kg, 2.5kg, 2kg로 설계하였다. 이에 따라 드라이버 및 배선을 포함하는 로봇팔의 총 무게는 약 10kg로 설계하고, 수심 10m 방수와 가반하중 2kg의 설계조건을 충족하기 위한 설계연구를 하였다.
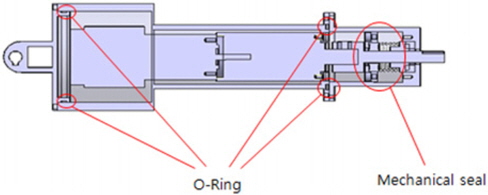
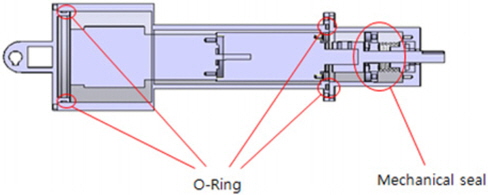
방수형 로봇팔의 설계에 있어서 어려운 문제 중의 하나는 관절축의 방수이다. 현재 모터 회전축의 방수에 사용되는 것 중의 하나로 미케니컬씰이 있다. 미케니컬씰은 조립을 하기 위한 공간과 마찰에 의한 부하 및 그에 따른 짧은 수명의 단점이 있으나 수중 10m 정도의 방수시스템에는 적합하다.
본 연구에서는 방수형 소형-경량화 로봇팔 의 관절구동기는 직결형태로 설계하였다. Fig. 3은 로봇 링크의 3D 모델링이고 Fig. 4는 방수 설계에 대한 구조이다. 소형 및 경량화를 고려하여 로봇 관절부의 링크 내에 설치공간이 상대적으로 작고 조립 및 분해가 용이하며 가벼운 미케니컬씰을 이용한 모터의 회전축 방수구조를 설계하여 관절 구동기에 적용 하였다.
1,2,3 축 모터 하우징은 Fig. 5와 같이 모듈타입으로 설계하여 필요 시, 각 파트만 교체 및 분해가 가능한 구조로 설계 하였다. 로봇 링크 지름을 최소화하기 위해 최소의 직경을 갖는 모터의 선정과 최소 조립공간을 제외한 하우징의 직경 설계를 통하여 소형, 경량화 하였고, 커넥터의 경우, 커넥터의 방해를 받지 않게 배선설계를 하였으며, 기존의 방수 커넥터는 길이가 길고 소형, 경량화에 맞지 않아 가는 나사와 클램핑 체결방식을 이용하여 Fig. 6과 같이 방수커넥터를 설계하였다. 또한, Pitch 운동을 하기 위하여 기어박스를 각 축 하우징과 동일선 상으로 놓고 결합하는 구조로 링크를 설계하였다.
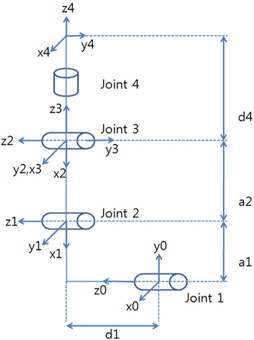
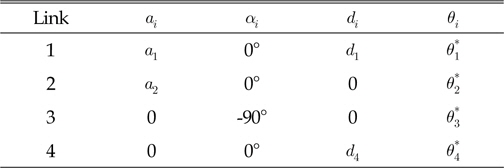
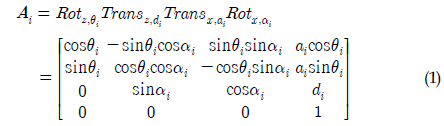
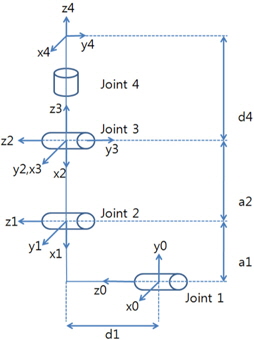
4축 로봇팔을 바탕으로 관절 구동기 링크에 대하여 기구학적 해석을 수행하였다. 로봇이 지면에 고정되는 1축을 기준으로 설정하여 D-H 규약(Denavit-hartenberg 규약)을 이용하여 Fig. 7과 같은 좌표계를 설정하였다. 또한, D-H 규약을 이용하여 좌표를 설정한 후
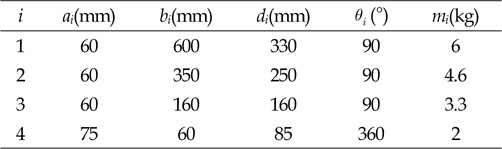
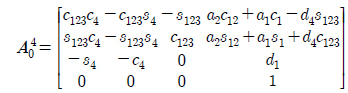
[Table 1] D-H parameter of 4-axis rorot
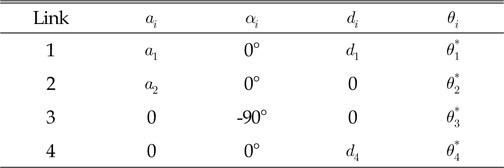
D-H parameter of 4-axis rorot
여기서
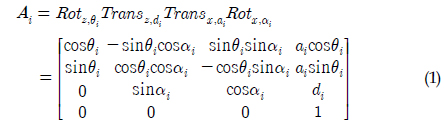

여기서
4축 로봇팔의 관절구동기 설계를 위하여 각 관절축에 가해지는 부하토크를 계산하였고 이를 바탕으로 로봇팔 관절구동기의 용량을 설계하였다.
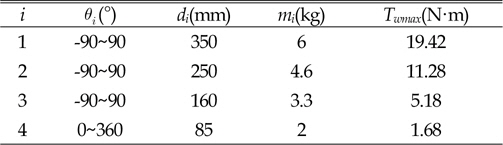
4축 로봇팔의 관절구동기에 걸리는 부하용량을 해석을 하였다. 방수형 4축 소형 로봇팔은 가반하중 10kgf와 4축 끝단에 2kgf의 외부부하가 작용할 때 각 축에 가해지는 부하토크를 계산하였다. Table 2는 각 관절의 링크 해당 파라미터(Parameter) 값을 나타낸 것이다.
[Table 2] Parameters of the driving Joint
Parameters of the driving Joint
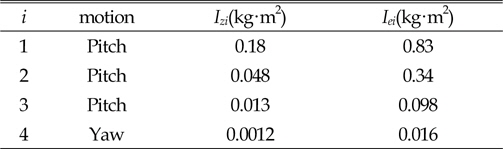
각 링크의 관성모멘트를 구하기 앞서 다음과 같은 가정을 하였다.
(1) 구동축은 회전중심에 위치 함 (2) 최대 변위 𝜃만큼 회전하는데 걸리는 회전시간은 i=1,2,3에서 1.2 s, i=4 에서는 2s (3) 가감속 시간은 0.15s (4) 회전축 마찰저항토크(Tf)는 0.1 N·m
회전축 (

회전축이 질량중심에서 거리가

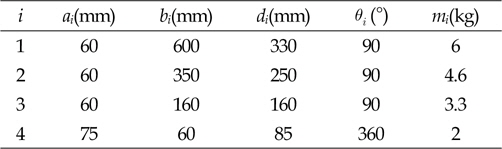
Table 3은 Eq. (4)와 (5)를 통해 얻어진 각 링크의 관성모멘트(
[Table 3] Moment of inertia of the joint
Moment of inertia of the joint
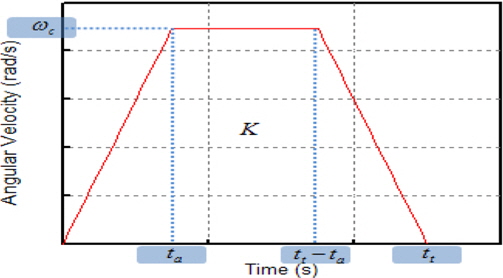
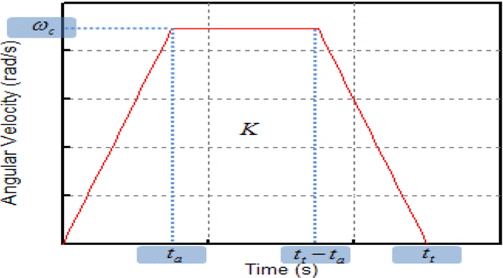
Fig. 8의 그래프 내부 면적은 각 관절의 총 회전각도



Table 4는 식 (7)와 (8)을 통해 얻어진 각 관절의 각속도, 각가속도 값을 나타낸 것이다.
[Table 4] Torque of the driving joints
Torque of the driving joints
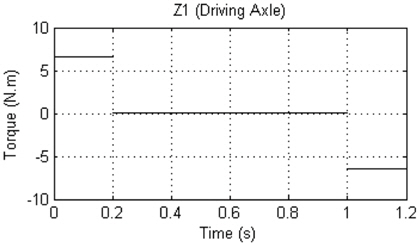
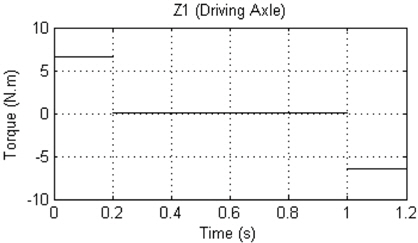
Fig. 9는 각 회전중심
자중에 의해 발생하는 각 관절의 토크 해석을 하였다. 로봇팔의 구조의 무게로 발행하는 각 축에 가해지는 부하 토크


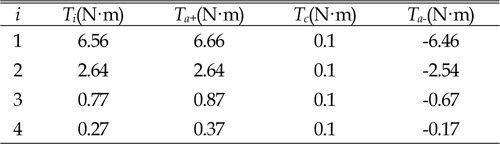
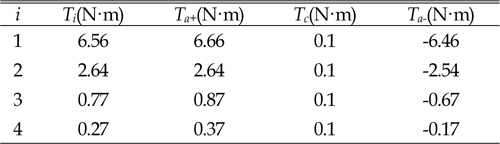
Table 5는 Eq. (9), (10)을 통해 링크중량 및 부하에 따른 각 관절 구동기에 걸리는 부하 토크값을 나타낸 것이다.
[Table 5] Torque of the driving joints
Torque of the driving joints
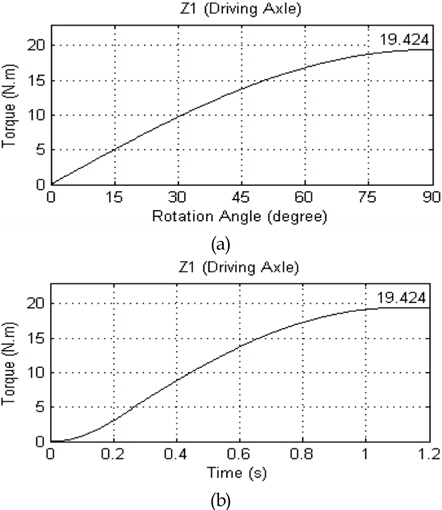
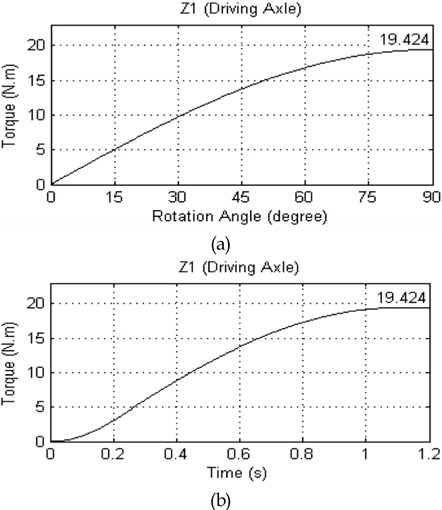
Fig. 10(a)는 회전중심
각 관절 구동기에 요구되는 구동모터의 용량은 다음의 식들에 의해 결정된다.



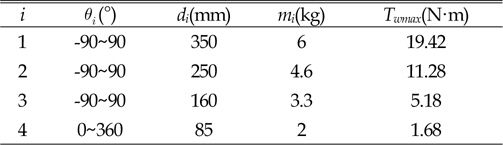
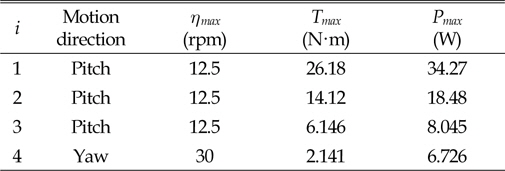
Table 6는 각 축의 최대 토크와 (
[Table 6] Rps and max torque of driving joints
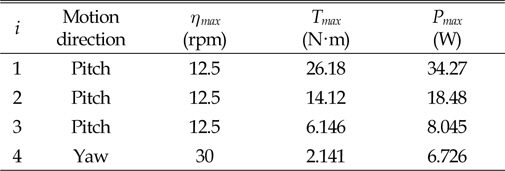
Rps and max torque of driving joints
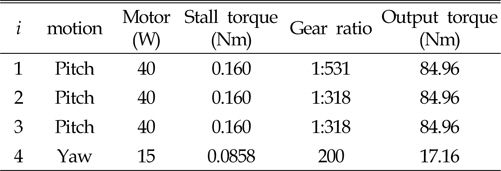
부하해석에 따라 각 구동축에 2배에서 5배의 안전율을 갖는 적합한 모터와 감속비율을 갖는 감속기를 선정하였다. 3축의 경우 구동모터의 용량이 충분히 크나 같은 용량의 모터 및 감속기를 사용함으로써 제자이 용이하도록 하였다. Table 7은 관절 구동기의 설계 사양을 나타낸다.
[Table 7] Specification of the joint actuators
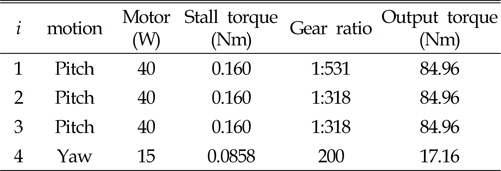
Specification of the joint actuators
소형 경량화의 제약 조건을 맞추기 위해 상대적으로 큰 조립 공간을 필요로 하고 무게가 많이 나가는 하모닉 드라이브보다 소형 평기어와 유성기어를 적용하였다. 관절구동기 1축의 경우 Pitch 운동을 담당하는 관절로 관절구동기 중 가장 많은 부하토크를 받는 관절이다. 따라서 기어비를 1:531의 고기어비로 구성하고 안전율을 두어 설계하였다. 4축의 경우 Yaw 운동을 담당하는 관절로 가장 작은 부하토크를 받는 관절이다. 따라서 기본적인 운동을 하기 위해 모터의 rpm 조절을 위하여 1:200의 기어비를 갖는 평기어를 적용하여 구성하였다.
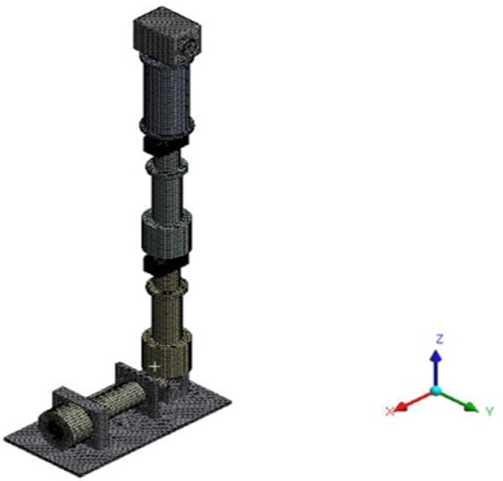
경량링크의 최적설계를 위하여 유한요소해석방법(Finite element method, FEM)을 이용하였다. 이를 위해 유한요소모델에서 로봇팔의 기구부 부분은 부품재질에 따라 각각의 특성을 고려하여 적용하였다. 로봇팔 부품들의 연결은 모든 부품을 조립하여 표현하기는 것은 해석을 너무 어렵게 만들어 결합부품 경계에서 생성된 동일 위치의 노드들은 하나의 노드로 고려하여 단일 부품으로 모델링하였다.
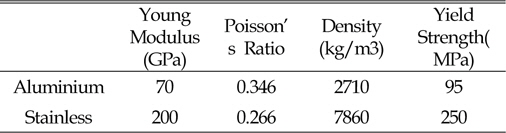
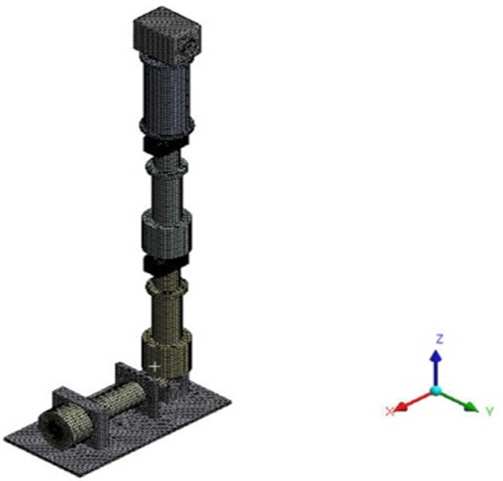
Fig. 11은 로봇팔이 0°로 유지되고 있을 때의 해석을 위한 모델이다. 로봇팔의 기구부 및 구성 부품의 재질은 Aluminum과 Stainless를 사용하였다. 재료에 적용한 물성치는 Table 8과 같다.
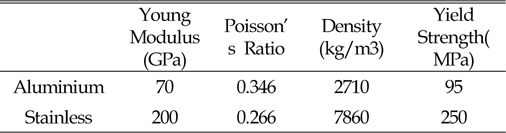
Material property
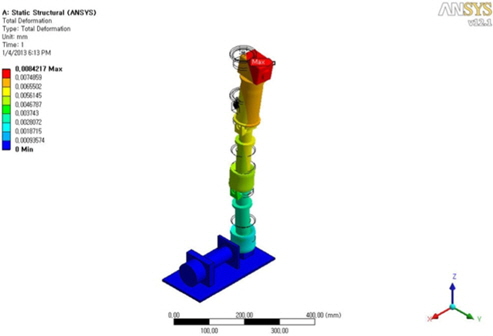
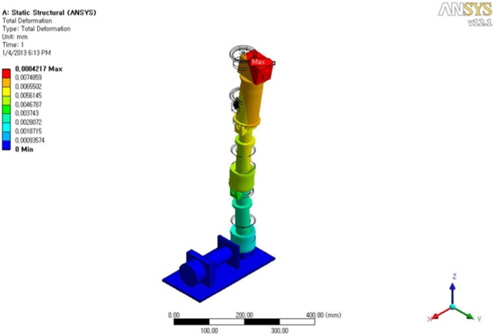
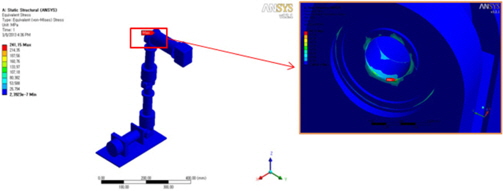
설계된 로봇팔이 0°에서 지탱하고 있을 때의 응력분포에 대한 해석 결과는 Fig. 12이고 변위에 대한 해석 결과는 Fig. 13 이다. 로봇팔의 해석은 로봇팔의 4축에 걸리는 가반하중 2kg과 중력가속도, 각 관절구동기 무게에 상응하는 외부하중을 고려하여 각 축에 걸리는 응력분포를 해석하였다. 설계 재질은 알루미늄(AL60)과 스테인레스(Stainless steel)로 선정하여 설계하였다.
해석 결과 0.008mm의 변위가 생기는 것으로 나왔다.
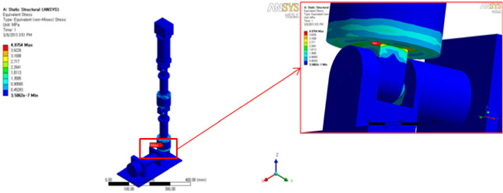
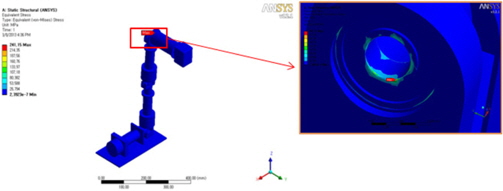
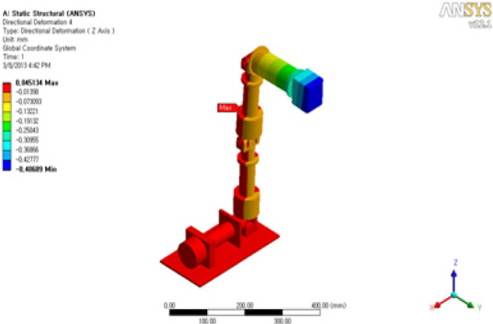
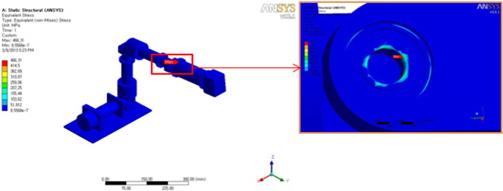
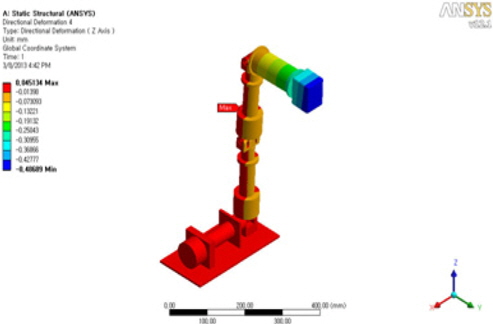
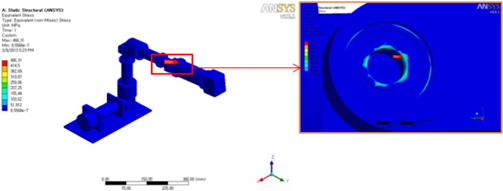
설계된 로봇팔이 3축 구동 시(90°)에서의 응력분포 해석 결과는 Fig. 14이고, 변위에 대한 해석 결과는 Fig. 15이다. 해석 결과 0.48mm의 변위가 생기는 것으로 나왔다.
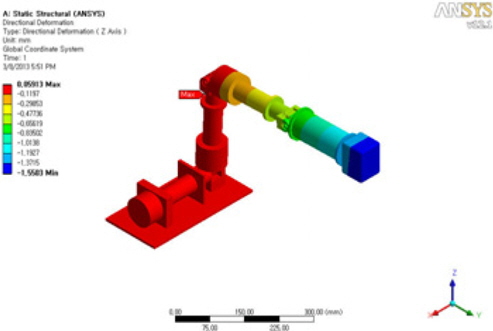
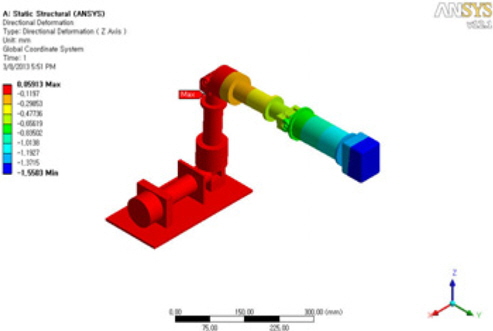
설계된 로봇팔이 2축 구동 시(90°)에서의 응력분포 해석 결과는 Fig. 16이고, 변위에 대한 해석 결과는 Fig. 17이다. 해석 결과 1.55mm의 변위가 생기는 것으로 나왔다.
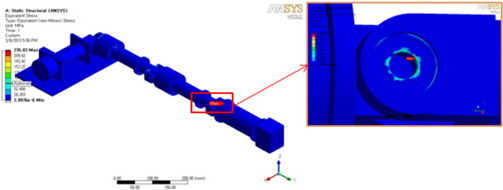
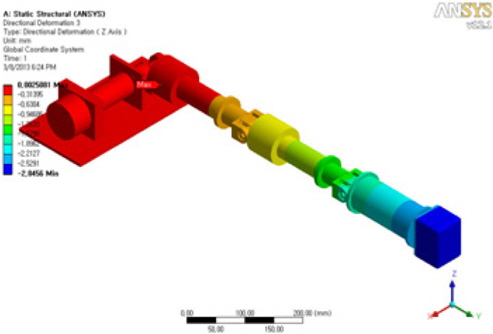
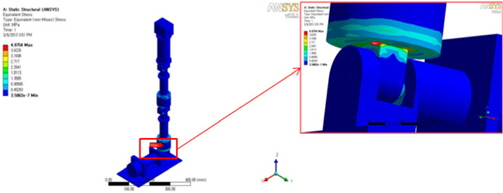
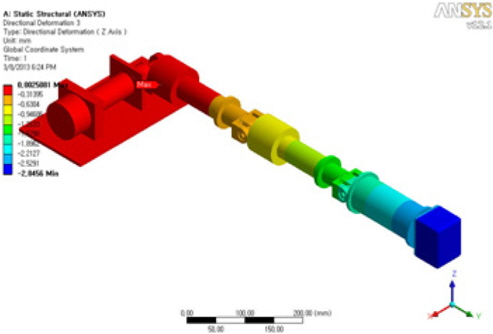
설계된 로봇팔이 1축 구동 시(90°)에서의 응력분포 해석 결과는 Fig. 18이고, 변위에 대한 해석 결과는 Fig. 19이다. 해석 결과 2.85mm의 변위가 생기는 것으로 나왔다.
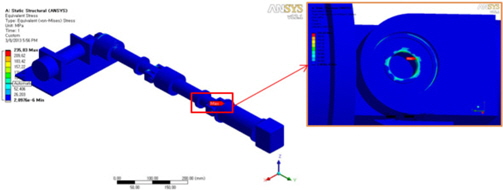
구조해석 결과 관절구동기와 관절구동기를 연결부의 축과 접하는 베어링에서 응력 집중이 발생하였으나 그 크기가 선정된 베어링의 허용하중의 여유 있는 허용 강도 범위에 있고 강도와 강성 및 목표 백래쉬 3mm에 맞추어 안정된 설계가 되었음을 시뮬레이션으로 확인 및 검증을 하였다.
본 논문에서는 화재나 홍수로 인하여 침수된 건물 내부를 탐사할 수 있는 방수형 소형 4축 로봇팔의 설계방법에 대한 연구를 하였다. 각 모터 축에 걸리는 부하토크에 대한 해석을 하였고, 2kg의 가반 하중 및 자체중량 10kg에 대한 로봇관절에 대한 동역학적 부하해석과 이에 따른 관절구동기의 용량설계를 하였다. 설계수심 10m 방수설계를 하였고 구동 시 작업에 방해 및 걸림을 방지하기 위해 방수형 소형 커넥터를 설계 및 배선 설계를 하였다. 그리고 경량 로봇팔 링크설계를 위해 FEM해석하였고 이를 통해 12kg의 부하에 적합한 강도와 강성을 갖는 안정된 설계를 확인하고 및 검증하였다.