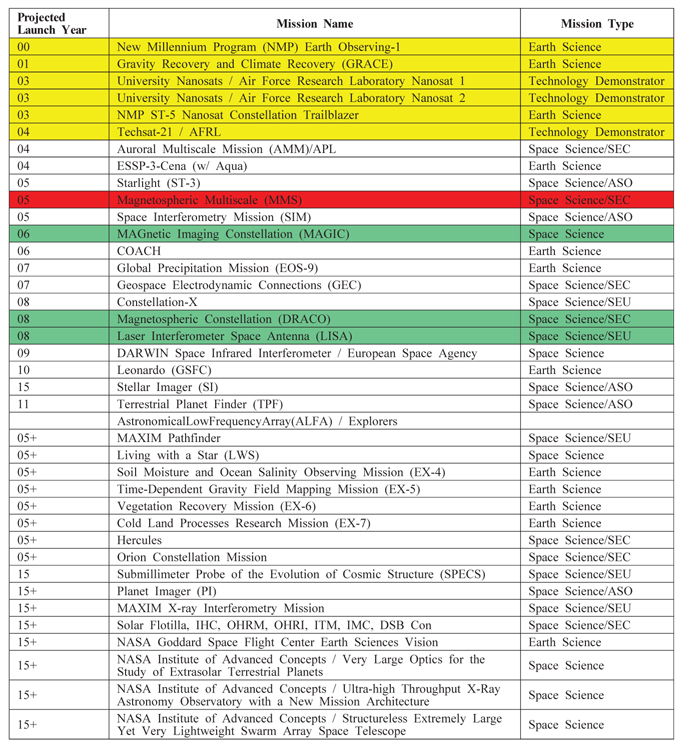
Satellite formation flying mission is main topic of study from 90’s and means that it cooperates mutually within close distance in more than two satellite with each duty. Above satellite formation flight is relatively cost-saving compare to the launching cost to set on the big satellite orbit and there is advantage of execution of mission with mobility as new equipment is implied in formation. Also, just in case that part of formation satellite is broken or impossible of execution of mission, it can execute mission longer with changing new part and through the mission like Interferometric SAR Mission, it provides outstanding information. Until now, executed satellite formation flying mission is earth observation, space environment study and space technology investigation and as Fig. 1 shows, it is planned to have several missions using satellite formation flying.
As above, there are advantages from formation flight of satellite but there are technical issues to solve exist also and one of these issues is the study about avoidance maneuver efficiently according to approaching of space debris. Currently Two Line Element sets (TLE) from North American Aerospace Defense Command (NORAD) has orbit information of approximately 17,000 objects around the earth. It only includes objects over 10cm able to track, and there are approximately 0.75 million objects of over 1cm and hundreds of millions objects of over 0.1mm in estimation. Especially, in low earth orbit (LEO), there is about 70% of space debris and there is high possibility of failing mission execution, in case that the objects are crushed with another object with over 10cm because the speed of the objects is kilometers per second. Therefore optimized avoidance strategies needs to be set for approaching space debris because the resources of satellite are limited.
From existing study, through repetitive calculation, there was study about calculating scope of avoidance maneuver (Alfano 2005) but it only provided scope of Del-V only to avoid collision, so it didn’t considered optimization of minimizing fuel. For another, there was study of optimizing avoidance maneuver for one satellite with generic algorithm (Kim et al. 2012). It proved that heuristic algorithm is compatible performance on issues on avoidance maneuver as avoidance maneuver plan performs; however, there was limitation of performing in single satellite.
There was study minority of controlling relative motion of satellite about formation flight operation for satellite. The Hill’s Frame was indicated relative motion with linearization in leader satellite and follower satellite and there was case of using eccentricity vector and inclination vector to keep continued formation maneuver (D'Amico et al. 2006). Besides this, there was maintained formation with atmospheric resistance (Blake 2007) and controlling notation to prevent collision within satellite to forming (Mueller & Larsson 2008), but there was no study about considering space debris and formation satellite at the same time. In collision avoidance maneuver within satellites forming formation, there is the point, ‘controlling’ set scope of relative position, but avoidance maneuver about space debris is for objects approaching with temporarily quick speed; there is clear difference in avoidance strategies and methods with previous one.
From this study, most considered point is setting maneuver plan to avoid space debris towards formation flight; however, not only it just decreasing dangerousness of space debris through avoidance maneuver, but also to get maneuver plan to save the Del-V consumption or to maximize maneuver cycle for formation within formation satellites.
Therefore from this study, it suggest heuristic algorithm for strategies of avoiding space debris from formation flight. Also, it used common software of Satellite Tool Kit (STK) from AGI in order to consider various perturbations those effects on the satellite through combing heuristic algorithm and STK. It avoids space debris towards to formation flight, minimizing fuel usage, considered optimization of maximizing formation holding time between two formation satellites. From these, it is considered possibility of adaption of heuristic algorithm in complicated situation.
2. COLLISION AVOIDANCE OPTIMIZATION FOR FORMATION FLYING SATELLITE
2.1 Optimization algorithm: PSOGSA
Heuristic Algorithm is on that searching best solution in given circumstances based on the experience; it has good performance for discontinuity or hard to formulate problem type compare to classical optimized algorithm. Like this heuristic algorithm, there are several based on type of searching method and representatively, there is generic algorithm inspired by Darwin’s evolution theory. Whereas, there are disadvantages of heuristic algorithm; calculation time is increasing proportionally to calculating time of fitness function, number of population, number of generation. To overcome, hybrid heuristic algorithm is developed with combining characteristics from other heuristic algorithm (Lai & Zhang 2009, Esmin et al. 2007, Li et al. 2008, Holden & Freitas 2008).
This study was used heuristic algorithm, PSOGSA, is combined from Particle Swarm Optimization (PSO) and Gravitational Search Algorithm (GSA) and it is algorithm that applies outstanding of informedness from PSO and quick convergence speed (Mirjalili & Hashim 2010).
PSO is the algorithm with motive of social behavior of animals and it leads to the final best solution with potential solution group with defined several particle. This means searching ability in broad space is superb compare to other algorithm because it based on each particle’s location, speed, distance between best solution particle in current generation and whole generation
GSA is the algorithm inspired from the law of universal gravity from Newton and potential solution has proportioned mass in goodness of fit of each solution. Therefore other solutions follows best performed solution in fitness function and follow quickly depends on the gap of performance. These kind of principle has characteristics of one solution searches near whole area, it converge to quickly on whole area compare to other algorithm.
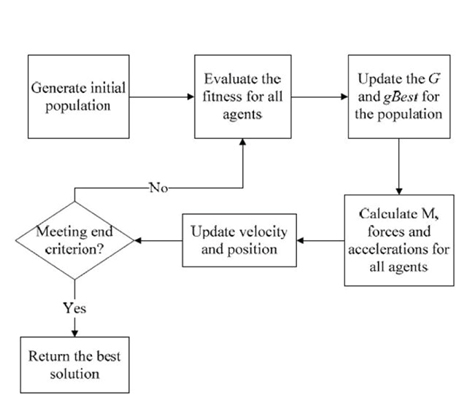
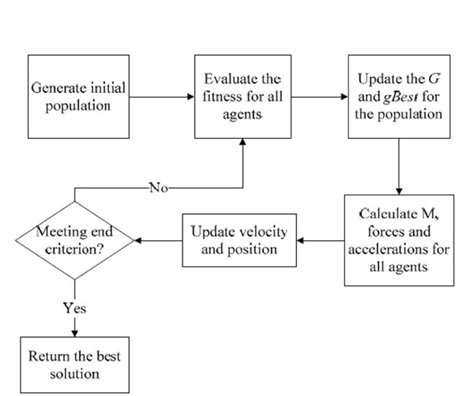
PSOGSA is combined algorithm with low-level hybrid of searching ability from PSO and convergence ability from GSA. In Fig. 2, it creates objects in random position at the beginning and comparing best superb object in current generation and whole generation in calculating goodness of fit, then update the information. After that, according to the principle of GSA, calculates each object’s mass and power adapting to objects. Process of other objects goes to best superb object calculates in the speed and location according to the principle of PSO and it repeats until the stopping criteria. From this study, single algorithm, PSO, had quick convergence speed and safe convergence compare to GSA (Mirjalili & Hashim 2010).
2.2 Relative orbit design for formation flying satellites
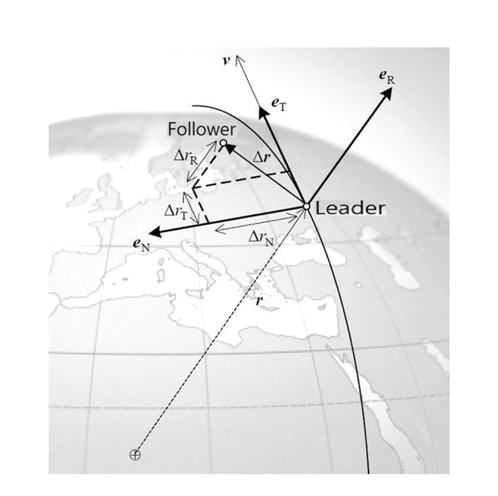
In this study, in order to set two satellite’s orbit, it indicated as relative motion in Hill Frame with leader-follower formation from one of the formation flight with follower satellite follows leader satellite in an elliptical orbit.
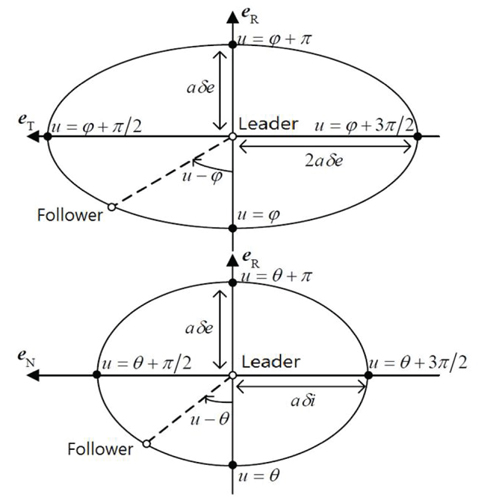
Fig. 3 shows relative motion of leader satellite and follower satellite. As leader satellite’s position is the starting point in the coordinate system with vector unit is as Eqs. (1-3).





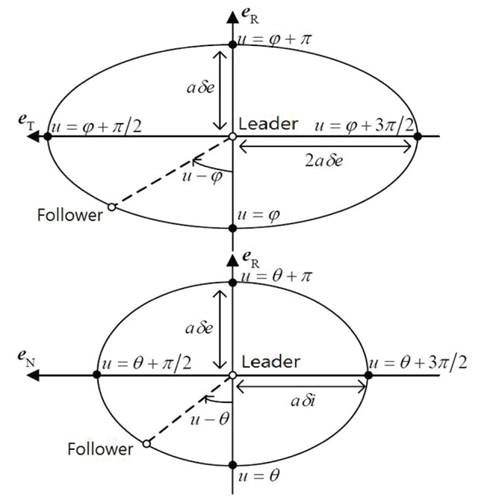
Eqs. (4) and (5) can indicates as Eqs. (6-8) like classical orbit elements to ease in orbit design (D'Amico et al. 2006).



Fig, 4 indicates relative position of leader satellite and follower satellite. Therefore, orbits of two satellite can be set with above process.
In this paper, Interferometric SAR Mission was composed based on the orbit of Kompsat-5 in assumption. In assumption, formatting two satellites’ size or weight is same and distance between satellites set as
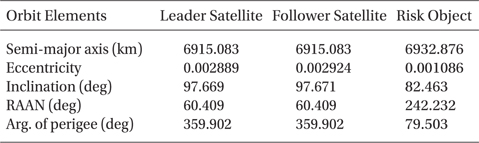
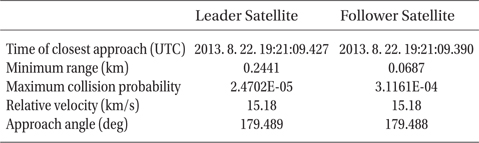
In general, criteria of avoidance maneuver sets as minimum distance or collision probability (Alarcón-Rodrı́guez et al. 2004). In this case, it is affected by the uncertainty of orbit, and approaching objects need to get close to set the avoidance maneuver condition because highly precise orbit accuracy is needed for satellite formation flying mission. Therefore, in this paper, it creates the imaginary objects that are approaching very close to formation satellite using TLE data. In Table 1, it shows orbit of imaginary object approaching two formation satellites, and Table 2 shows the information of approaching event like minimum distance, collision probability, relative speed and approaching angle.
[Table 1.] Orbit elements of formation flying satellites and approaching risk object.
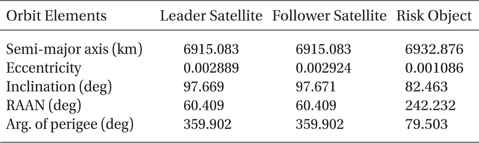
Orbit elements of formation flying satellites and approaching risk object.
[Table 2.] Conjunction event between formation flying satellites and approaching risk object.
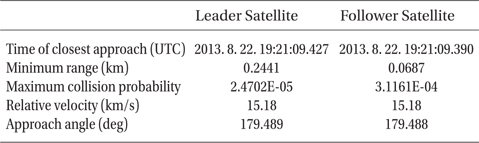
Conjunction event between formation flying satellites and approaching risk object.
To set the avoidance maneuver like this approaching event, we performed the optimized equation considered Del-V consumption and maneuver cycle for maintenance the formation. Minimizing Del-V consumption for efficient avoidance maneuver is the best intuitive way considering efficient maneuver and it also helpful to managing time and resources efficiently to maximizing maneuver cycle for formation maintenance.
According to the relative simulation results (D'Amico et al. 2006), several cm/s of maintenance maneuver is needed in two days in similar altitude and this is because altitude of formation satellites is relatively low and disturbing force is increased.
Therefore, two optimized goals mentioned above, it set as single optimization with Weight Sum Method like Eq. (9).

The maneuver cycle means the staying time within regular error from reference orbit and it sets error in Intrack-Radial Plane and Crosstrack-Radial Plane and as long as it stays longer within above error from reference orbit, its maneuver cycle is longer.
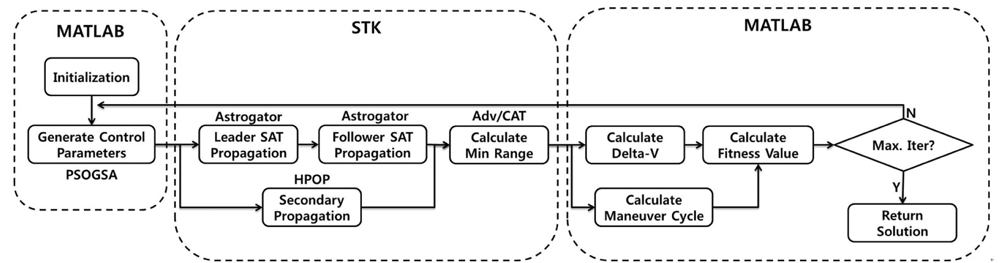
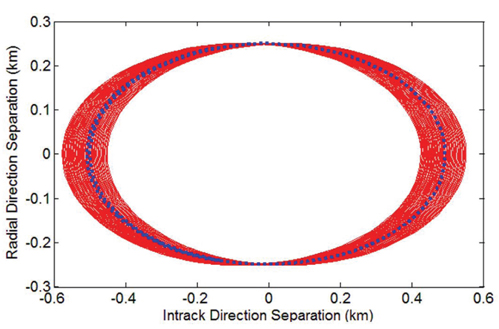
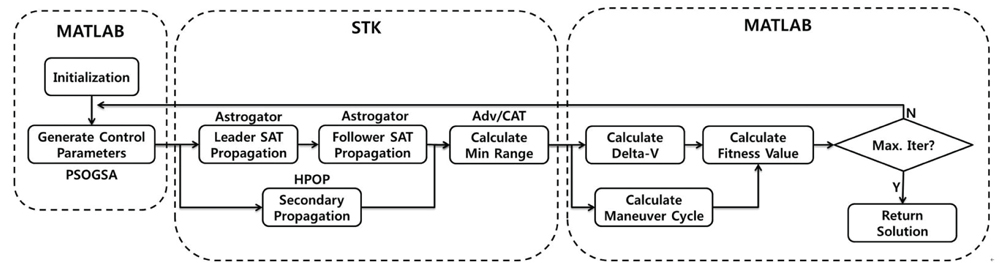
Like Fig. 5, simulation performs connecting STK and MATLAB. Initializing was performed, and it created control variable mentioned ‘entity’ on page 2.1 through PSOGSA algorithm. Created control variable from this sent to the scenario STK, and using this information, performed orbit propagate that is adapted maneuver in STK/Astrogator. After it performed orbit propagate in two satellites, it got the data of relative position of leader satellite and follower satellite in Radial-Intrack-Crosstrack (RIC) in coordinate system. At the same time, collision analysis data like minimizing distance and maximum collision probability were calculated from Adv/CAT, analyzing collision risk as a sub module of STK, is sent to MATLAB again. Based on the data from STK, maneuver cycle of formation maintenance and used Del-V are calculated in MATLAB. After adapts to the fitness formation on Eq. (9), it evaluated performing in each entity and gets final solution until the stopping criteria satisfies or finds best solution.
From above process, perturbation model, WGS84EGM96 gravity model (21 × 21), Jacchia–Robers atmosphere model, spherical solar radiation model, solar gravity, and lunar gravity were adapted.
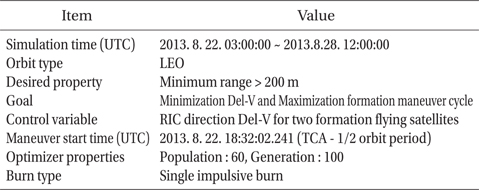
In Table 3, it shows simulation condition. Analysis time was from 3 a.m. on Aug. 22nd to 12 p.m. on Aug. 28th, 2013 for about 6 days, a success criterion was set as getting at least more than 200 m between two satellites forming formation satellites and approaching objects. There was 3 directions to Del-V quantity of two satellites and total 6 control variables, and limited to maximum 0.05 m/s to each direction on Del-V quantity. It set as performing single impulsive burn at the same time half-orbit before time of closest approach (TCA) and it is for normal mission operation. At last, acceptable error range from formation maintenance maneuver to reference orbit was 150 m for Intrack-Radial Plane and 100 m for Crosstrack-Radial Plane, and generation number for 50 and population for 100 of PSOGSA.
[Table 3.] Conjunction event between formation flying satellites and approaching risk object.
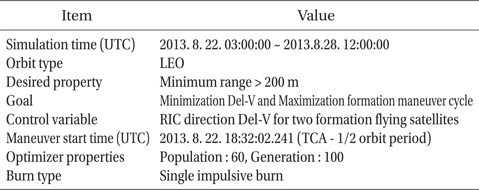
Conjunction event between formation flying satellites and approaching risk object.
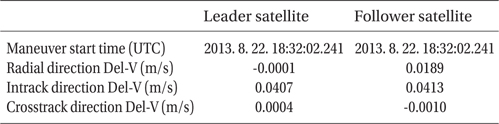
In Table 4, it shows the result from the simulation. Del-V of Intrack direction shows the biggest value than other directions and this means that increasing altitude to avoid the approaching object. Also it extended the staying time within setting error compare to Crosstrack Radial Plane as two directions to Del-V was maneuver opposite direction.
[Table 4.] Optimization solution for formation flying satellites avoidance maneuver planning.
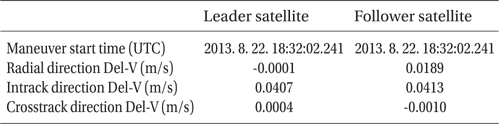
Optimization solution for formation flying satellites avoidance maneuver planning.
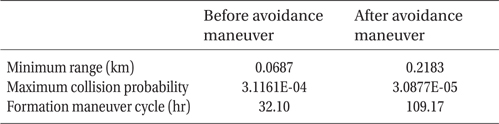
In Table 5, it shows the adapted results from the solution in PSOGSA and as approaching objects’ distance is about 218 m after avoidance maneuver, it was succeed in avoidance maneuver in two satellites from approaching objects. Total sum of used Del-V in avoidance maneuver in two satellites are 4cm/s and practicality, it’s similar in Del-V with appropriate orbit maneuver in regular satellite. Also distance from approaching object after avoidance maneuver, it shows closed to 200 m in setting simulation and it concludes to the result of decreasing setting fuel usage in fitness functions. At least, in the maneuver cycle, its 32 hours in not using avoidance maneuver, but as performs avoidance maneuver, it increases to 109 hours and means that as performing avoidance maneuver, it includes role of formation maintenance maneuver as well.
[Table 5.] Optimization result for formation flying satellites avoidance maneuver planning.
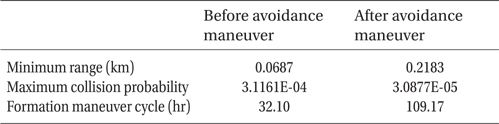
Optimization result for formation flying satellites avoidance maneuver planning.
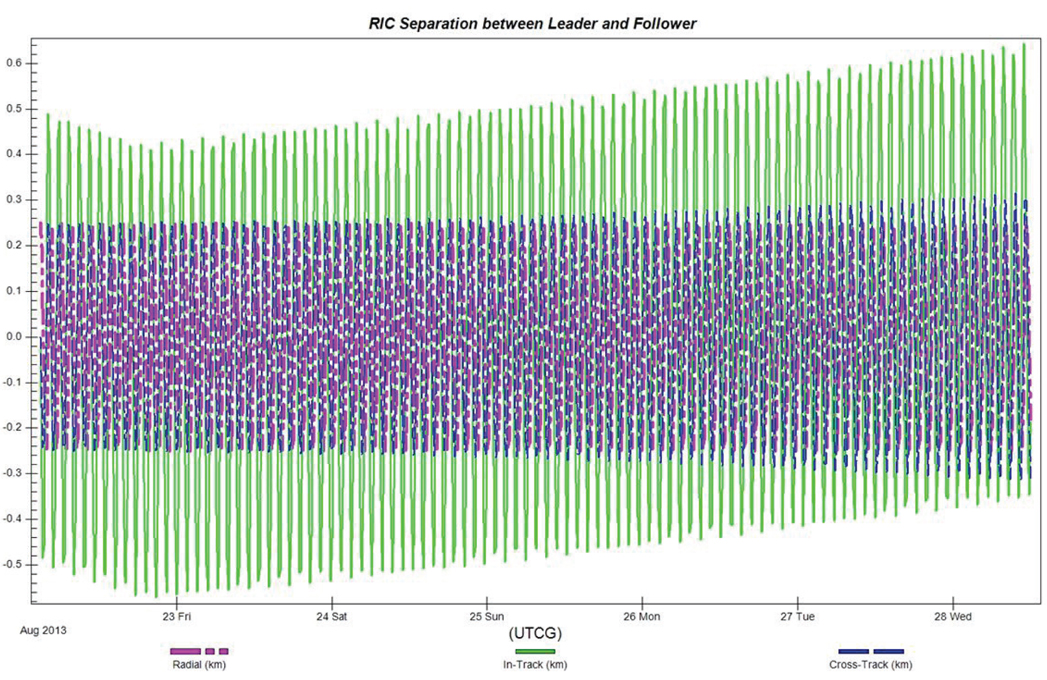
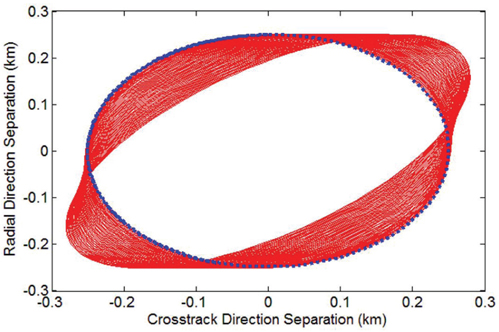
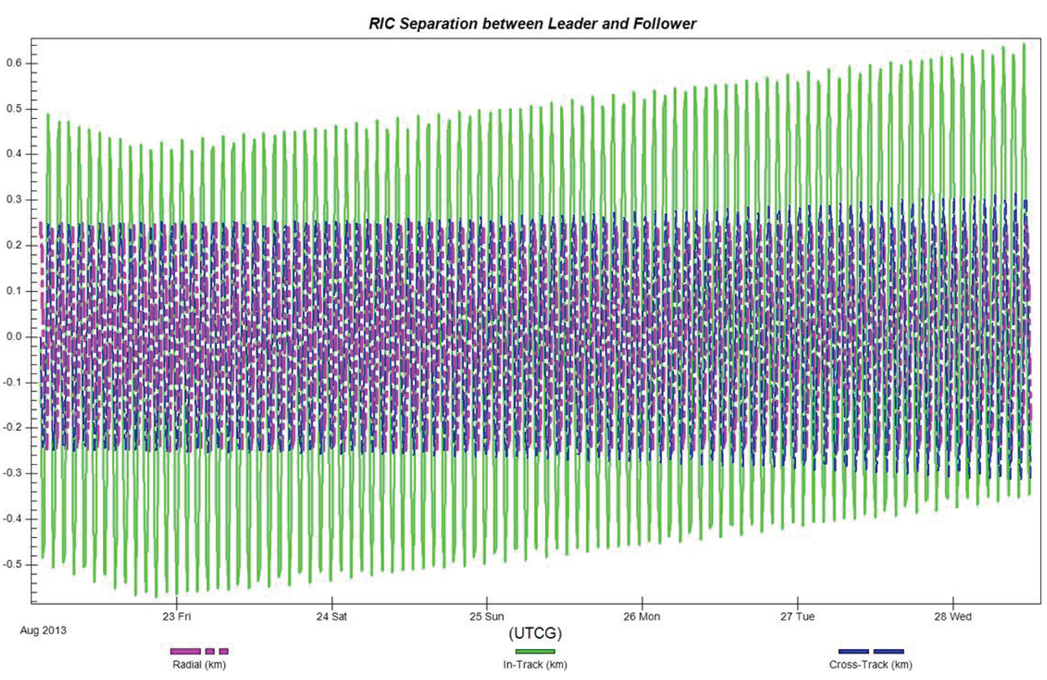
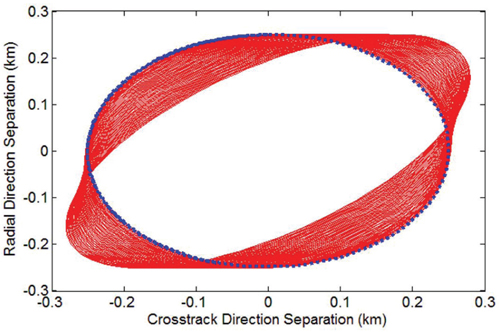
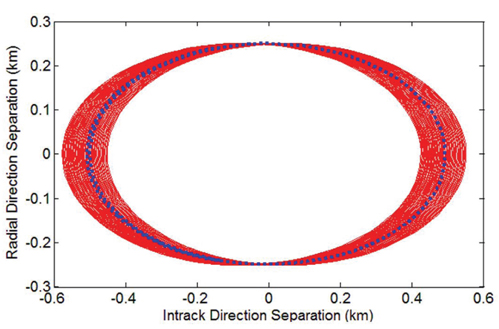
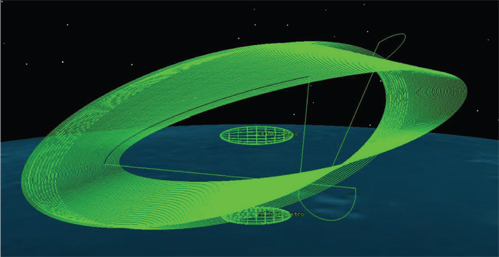
It also shows in Fig. 6, obvious change in RIC graph before avoidance maneuver is Intrack direction, and it shows that center point in Intrack-Radial Plane goes towards leader satellite. However, after avoidance formation, center of Intrack-Radial Plane is moved so as a result, maneuver cycle of formation maintain is increased. Figs. 7 and 8 show orbits on Intrack-Radial Plane and Crosstrack-Radial Plane, and it maintains distance from error range that is set from reference orbit at the beginning. Fig. 9 shows relative orbit of follower satellite to leader satellite on the three dimensions.
From this paper, it suggested heuristic algorithm to avoid approaching space debris in operating formation satellite. Heuristic Algorithm has robustness in complexity metric and problem attribute and, within provided resources, it is the best solution in avoidance maneuver of formation satellite in broad searching scope. However there is the problem in convergence time taking longer, this thesis used hybrid heuristic algorithm, PSOGSA from combining attributes from two heuristic algorithms to supplement. Additionally, it used commercial software, STK, to have precise orbit propagation in orbits of formation satellite considering maneuver.
To set satellite formation flying, relative motion of follower satellite to leader satellite was indicated in Hill frame and from this; it was established satellite formation flying with orbiting elliptical orbit centrally in leader satellite and follower satellite. Imaginary risk object passing closed to two satellites was generated by using TLE data and we defined the optimization problem, which is minimizing the Del-V consumption and maximizing maneuver cycle with basically getting 200 m from risk object at least.
Through simulation results, it satisfied success criteria of avoidance maneuver from getting 218 m of distance from dangerous objects and used Del-V of two satellites are each 4cm/s, it is considerable results practicality compare to other satellite’s cases. Also it showed close result of set minimum range criteria; it also tells tried to minimize Del-V and showed effect on more than 3 times of formation maintain compare to not using avoidance maneuver on the side of maneuver cycle of formation satellite.
From this, heuristic algorithm shows good performance in avoidance maneuver plan setting of formation satellite, and in future, it can be set avoidance maneuver plan with adapting heuristic algorithm in complicated formation maneuver with more than 3 satellites. Also heuristic algorithm also provides several solutions to operator with various solutions from multi-objective optimization