DGPS 기준국은 Differential GPS를 위한 GPS 보정정보를 생성하고 방송하는 역할을 하는 국가 인프라이다. 현재 한국에서는 과거 하드웨어 기반의 DGPS 기준국 시스템을 개선하고 고도화하기 위해 USCG에서 제안한 차세대 표준인 소프트웨어 기반 DGPS 기준국을 도입하여 운영하고 있다. 그러나 USCG에서 제안한 소프트웨어 기반의 DGPS 기준국은 그 형태만 소프트웨어 방식으로 변경되었을 뿐 본질적인 아키텍처는 상당부분 개선되지 않아 소프트웨어 기반으로 변경한 장점을 크게 살리지 못하고 있다. 본 논문에서는 보다 간결화된 구조가 요구되는 DGPS 기준국에서 사용될 수 있는, 기준국 소프트웨어와 감시국 소프트웨어가 통합된 새로운 소프트웨어 기반 해양 DGPS 기준국의 아키텍처를 설계하였다.
The DGPS reference station is a national infrastructure generating GPS correctional information and transmitting the signal for Differential GPS. Currently, Korea has applied and operated the software-based DGPS reference station as a standard of the next generation proposed by the USCG in order to improve the hardware-based DGPS reference system. However, software-based DGPS reference station proposed by USCG was changed in software method, only for form. There is no advantage to changing software-based because the most critical part of architecture has not been improved. In this paper, we have designed a new software-based marine DGPS station architecture that a reference station software and a monitor station were integrated. The new marine DGPS station architecture based on software is a more simplified structure than it used to be and can be utilized in the DGPS reference station.
GPS의 보정정보를 생성하고 방송해 주는 DGPS 기준국에서 사용하는 시스템은 크게 DGPS 기준국과 감시국으로 나뉜다.[1] DGPS 기준국은 Reference Station (RS), 감시국은 Integrity Monitor(IM)로 불리우며 두 시스템은 그 기능이 최근까지 GPS 수신기에 탑재되어 있었다. 다시 말해, RS와 IM은 하드웨어 내부에서 펌웨어 형태로 동작하는 하드웨어 기반 시스템으로 구성되어 있었다.
하드웨어 기반 RS와 IM은 그러나 높은 구축 비용과 신기술 적용의 어려움과 같은 문제를 갖고 있어 미국의 USCG(US Coast Guard, 미 해안경비대)에서는 하드웨어 기반 RSIM 구조를 탈피하고 보다 개선된 차세대 DGPS RSIM 아키텍처를 제안하였다.[2] USCG에서 제안한 차세대 DGPS 아키텍처의 핵심은 하드웨어 기반으로 동작하는 DGPS RSIM 시스템을 소프트웨어로 구성하여 운영하는 것으로, 이렇게 함으로써 새로운 기술이 대두될 때 빠르게 적용할 수 있도록 하고 구축 비용 역시 감소시킬 수 있도록 하였다. 그러나 차세대 DGPS RSIM 아키텍처에 따라 실제 개발된 소프트웨어 기반 DGPS RSIM 시스템은 몇가지 문제점을 드러내고 있는데, 본 논문에서는 이렇게 드러난 문제점을 분석하고 이를 해결하기 위한 새로운 소프트웨어기반 DGPS RSIM 시스템의 아키텍처를 제안한다.
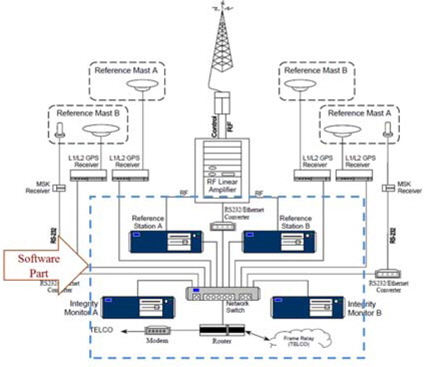
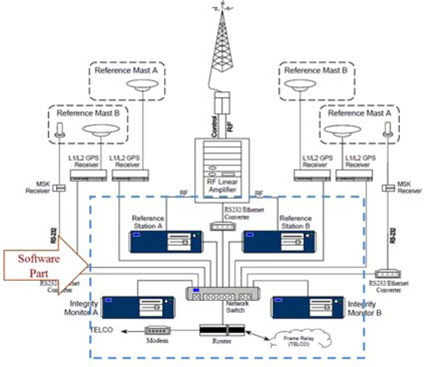
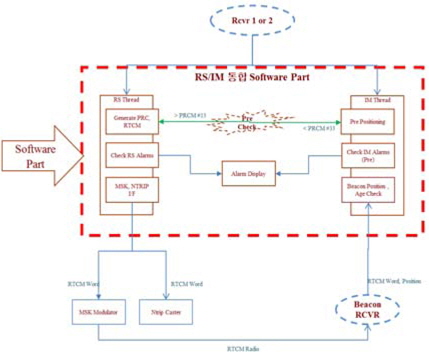
이 장에서는 USCG에서 제안한 차세대 DGPS 기준국의 아키텍처에 따라 개발된 기존의 소프트웨어 DGPS RSIM 시스템을 소개하고 이 시스템이 가진 문제점을 분석한다. 기존의 소프트웨어 기반 DGPS RSIM 시스템은 그림 1과 같이 구성되어 있다. 이 아키텍처는 USCG에서 제안한 것으로 네 개의 GPS 수신기와 하나의 MSK 변조기, 하나의 MSK 복조기 그리고 소프트웨어 RSIM 시스템이 설치되어 있는 네 대의 컴퓨터로 구성되어 있는 것을 볼 수 있다.
그림 1에서 보는 것처럼 이 장비들은 모두 네트워크 허브를 통해 서로 연결되어 있으며, 상호간 통신은 이더넷을 이용하고 있다.
이 아키텍처에 따라 DGPS RSIM 시스템을 구성하게 되면 GPS 수신기는 복잡한 RS와 IM 기능을 수행할 필요 없이 단지 GPS 신호를 수신하여 Raw Measurement 데이터만을 생성하면 되므로 기존의 DGPS 기준국용 수신기의 가격에 비해 현저히 저렴한 가격의 제품을 사용할 수 있다.[3]
또한 RS와 IM을 GPS 수신기에서 분리하여 별도의 소프트웨어로 구성함으로써 소프트웨어로서의 장점을 활용할 수 있게 하였다. RS와 IM이 소프트웨어의 형태이므로 신기술의 적용이 필요해 졌을 때 값비싼 하드웨어를 교체하여 적용할 필요 없이 RS와 IM 소프트웨어의 수정만으로 간단히 신기술을 적용할 수 있도록 하였다. 이 외에도 RS와 IM 시스템이 소프트웨어로 구성되어 얻게 된 장점이 다수 존재하지만 이러한 장점을 상쇄시키는 단점이 실제 운영상 발견되었다. 가장 큰 단점은 비용의 증가이다.
설치 및 운영상의 비용을 감소시키기 위해 대두된 소프트웨어기반 DGPS RSIM 아키텍처가 오히려 설치 및 운영비용을 증가시키고 있다. 하드웨어 기반의 DGPS RSIM 아키텍처에 비해 소프트웨어 기반 DGPS RSIM 아키텍처는 구성요소가 오히려 늘어나 있다. GPS 수신기의 가격은 저렴해 졌으나 RS와 IM이라는 구성요소가 더해짐으로써 그 장점이 상쇄된 것이다. 또한 소프트웨어 구성요소가 늘어난 이유로 운영자가 관리해야 할 장비가 늘어난 결과를 가져오게 되어 운영의 복잡도 역시 증가하였다. 기존의 하드웨어 기반 DGPS RSIM 시스템은 Control Station이라는 RS와 IM을 제어하고 모니터링할 수 있는 소프트웨어 하나만을 이용하면 운영에 무리가 없었으나, RS와 IM이 소프트웨어로 변경되면서 운영자가 지켜봐야할 UI가 세 개로 늘어나게 되었다.
따라서, 이러한 단점을 제거하여 소프트웨어 기반의 DGPS RSIM의 시스템이 가지는 신기술과 새로운 요구 사항의 빠른 적용, 기능의 쉬운 변경과 관리 효율 향상이라는 장점을 극대화할 수 있도록 새로운 아키텍처를 제작하였다.
이 장에서는 2장에서 언급한 소프트웨어기반 DGPS RSIM 시스템에서 발견된 단점을 보완하기 위해 본 논문에서 제안하는 새로운 아키텍처를 보인다.
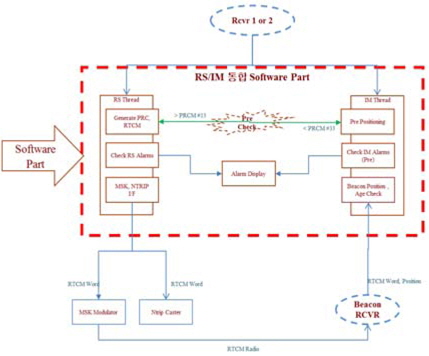
그림 2는 소프트웨어기반 DGPS RSIM시스템을 통합한 아키텍처를 보이고 있다. RS와 IM 두 개로 나뉘어져 동작하도록 구성되어 있는 기존의 아키텍처에서 벗어나 RS와 IM의 기능이 하나의 소프트웨어 내에서 동작하도록 아키텍처를 설계하였다. 통합 소프트웨어 RSIM에서 사용하는 데이터는 GPS 수신기의 Raw measurement와 RTCM 메시지 표준(RTCM 2.3), 그리고 RSIM 메시지 표준(RSIM 1.2)으로, 이들 RSIM 및 RTCM 메시지는 국제표준으로 정해져있다. 통합 소프트웨어 RSIM은 이들 메시지 표준을 정확히 따르도록 설계되며, 같은 데이터 및 메시지 표준을 사용하여 기존 DGPS RSIM과의 호환성을 유지할 수 있다.
RS의 핵심기능은 GPS의 보정정보를 생성하는 것이고, IM은 RS에서 생성한 GPS 보정정보의 품질을 검사하고 문제가 발생할 경우 RS로 피드백을 하는 것이다. GPS 보정정보를 생성하고 이 품질을 검사, 피드백하는 일련의 과정을 구현하기 위해 통합 DGPS RSIM 아키텍처에서는 RS의 역할과 IM의 역할을 하는 두 개의 쓰레드를 포함한다.
GPS 수신기에서 수신한 GPS의 Raw measurement 데이터를 통합 DGPS RSIM 시스템이 수신하면 RS와 IM 스레드에 동시에 이 데이터를 전달한다.
RS 스레드는 이 Raw measurement를 이용하여 GPS 보정정보를 계산하고 이를 즉시 IM 스레드로 전달한다. RS와 IM이 분리되어 동작하는 기존의 아키텍처 하에서는 이 순간 GPS 보정정보는 네트워크를 통해 IM으로 전달되어 지며 이에 대한 피드백을 받을 때 까지 동작을 멈추게 된다. 네트워크에 문제가 생길 경우 시간지연이 발생하게 되는데, 이는 종종 소프트웨어 RSIM 시스템의 문제가 되고 있다.
그러나 통합 DGPS RSIM 시스템에서는 스레드간 데이터 전달이 이루어 지므로 GPS 보정정보에 대한 피드백이 시간 지연 없이 즉시 이루어 지게 되어 RS의 피드백 대기시 발생할 수 있는 오류가 없어지게 된다.
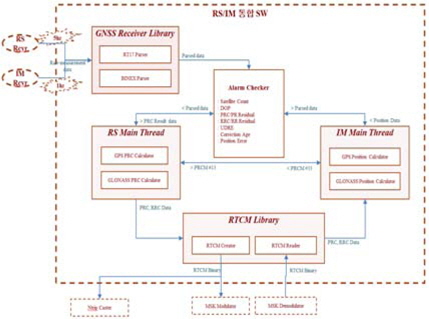
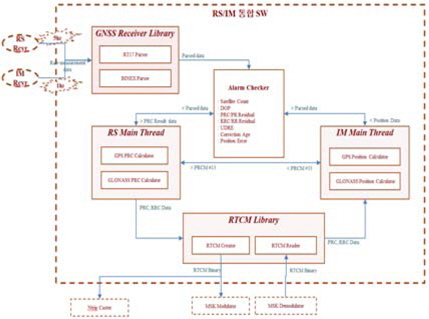
그림 3은 본 논문에서 제안하는 통합 소프트웨어 DGPS RSIM의 모듈 구성을 나타낸다. GNSS Receiver Libarary에서 수신기의 Raw measurement 데이터를 파싱하여 필요한 데이터를 추출하고 이 데이터의 문제점 여부를 즉시 판별한다. 이후 RS와 IM의 스레드에서 보정정보 생성 및 검사의 과정을 거친 후 RTCM Library를 이용하여 RTCM 메시지를 생성하고 방송하게 된다.
통합 소프트웨어 RSIM에서는 RS와 IM이 분리된 아키텍처와 달리 하나의 소프트웨어에서 RTCM 메시지의 변조, 복조가 모두 이루어 지며 방송 및 수신 역시 통합 소프트웨어 RSIM에서 이루어 진다.
RTCM메시지를 통해 전달되는 GPS보정정보 전송 방법을 Post Broadcast라 하며, Post Broadcast를 수행하기 전 네트워크를 통해 미리 IM 으로 보정정보를 전달해 오류 여부를 검사하는 것을 Pre Broadcast라고 한다.[4] 통합 소프트웨어 DGPS RSIM 시스템에서는 RS와 IM이 분리되어 있지 않아 네트워크를 사용하지 않으므로 Pre Broadcast는 소프트웨어 내에서 즉시 이루어 지며 Post Broadcast는 다소간의 시간차를 두고 이루어지게 된다.[5]
DGPS 기준국에서는 Post Broadcast를 통하여 DGPS 보정정보를 사용자에게 전달한다. 이때 사용되는 메시지인 RTCM 2.3은 RTCM SC-104에서 정의한 국제표준으로, 전 세계에서 공통으로 사용되고 있는 메시지 표준이다. 통합 DGPS RSIM 시스템에서 생성, 방송하는 보정정보는 이 RTCM 2.3 메시지 표준을 이용하여 방송되므로 기존 시스템에서 통합 DGPS RSIM 시스템으로 교체하여도 데이터의 이용에는 문제가 발생하지 않는다.
즉, 기존 DGPS 시스템과 통합 소프트웨어 RSIM 시스템은 국제 표준인 RTCM 2.3 메시지 표준을 사용하므로 국내에서 독자적으로 통합 소프트웨어 DGPS RSIM 시스템을 사용하여도 국가간 데이터 이용에는 문제가 발생치 않는다.
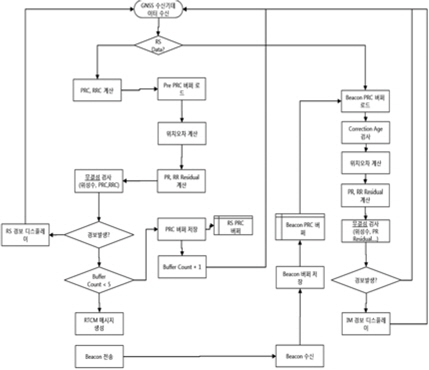
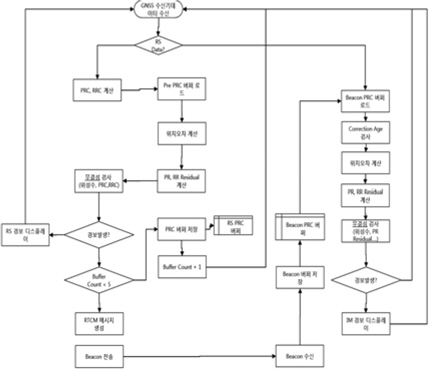
이 장에서는 통합 소프트웨어 DGPS RSIM 시스템의 데이터 처리 순서를 보인다. 그림 4는 통합 소프트웨어 DGPS RSIM 시스템의 동작 순서이다. GPS 수신기로부터 Raw measurement 데이터를 수신하면 가장 먼저 RS에서 사용되는 데이터인지 IM에서 사용되는 데이터인지를 검사한다. 그 후 GPS 보정정보(PRC, RRC)를 계산하고 이를 이용해 즉시 측위를 해본 후 오류의 정도를 검사하게 된다. 이 단계에서 GPS 보정정보의 품질이 미리 결정되며 이를 미리 정의된 품질기준을 만족하지 못할 경우 경보를 발생한다.
이 즉시 검사 단계를 초당 5회 거친 후 경보가 발생하지 않을 경우 RTCM 메시지를 생성하여 GPS 보정정보를 방송하게 된다. Beacon을 통해 RTCM 메시지가 수신되면 Post broadcast 모드로 간주하여 이에 대한 검사 과정(위치,PRC,RRC등)을 거친 후 검사결과를 경보를 통해 표출한다. 실제 DGPS 사용자는 이 Beacon을 통해 방송되고 있는 RTCM 메시지를 이용해 GPS 측위 오차시 보정정보를 사용하게 된다.
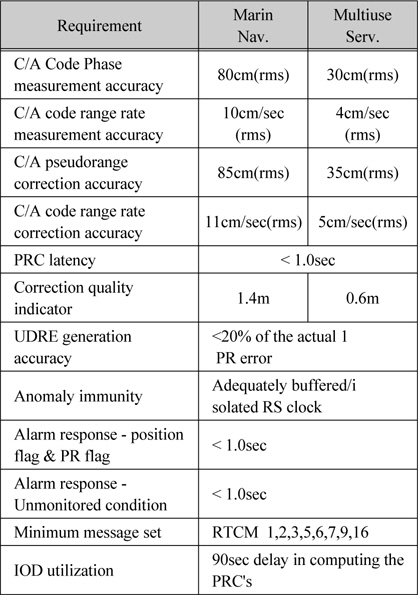
DGPS RSIM 시스템은 표 1과 같은 성능조건을 만족해야 한다고 표준으로 정해져 있다. 따라서 성능을 테스트 할 때 이 조건이 충족되는지를 우선 테스트해 야한다.
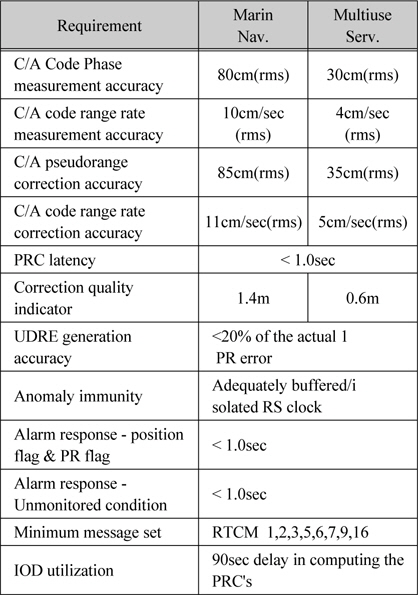
RS의 성능요구조건
표 1은 Reference Station 시스템이 만족해야 하는 성능요구조건을 보이고 있다. RS 시스템은 PRC latency가 1초 이내여야 하며 경보 발생까지의 시간도 1초 이내에 이루어져야 한다.[6]
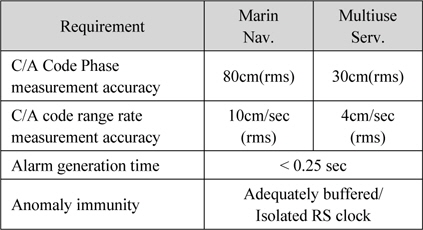
표 2는 Integrity Monitor 시스템이 만족해야 하는 성능요구조건을 보인다. IM이 모든 조건을 검사하고 경보를 발생하기 까지 0.25초를 넘기지 말아야 함을 나타내고 있다. 본 논문에서 제안하는 아키텍처에 따라 구현되는 통합 소프트웨어 RSIM 시스템은 위의 성능 요구조건을 모두 충족해야 한다.
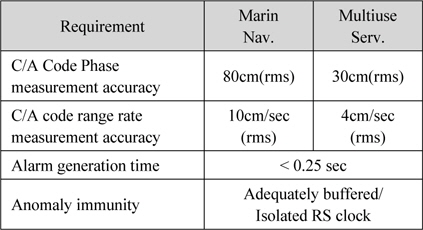
IM의 성능요구조건
따라서, 구현 단계에서 부터 테스트 단계까지 위의 요구조건을 충족하는지 지속적으로 테스트 하며 시스템을 구현하였다.
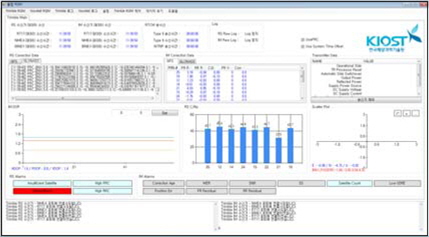
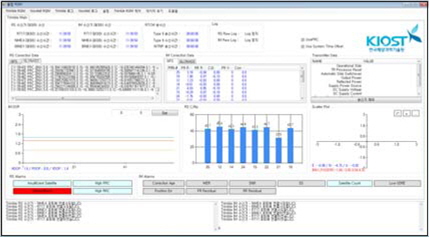
그림 5는 테스트용으로 구현된 통합 소프트웨어 DGPS RSIM 시스템의 GUI이다. 아키텍처에서 보인 것처럼 하나의 소프트웨어에서 RS와 IM의 기능을 모두 수행하며 무리없이 동작함을 확인하였다. 테스트용 프로그램의 구현목적은 RS 와 IM 시스템이 하나의 소프트웨어서 동작되어도 무리없이 DGPS 기준국으로서의 기능을 수행할 수 있는지의 여부를 테스트하기 위한 것으로, PRC latency는 raw measurement를 전송받는 즉시 생성되었으며 생성후 방송까지의 시간도 시간 측정의 의미가 없을 만큼 극히 짧았다.
IM 기능 역시 IM이 수행해야 하는 모든 검사를 수행할 수 있음을 확인하였으며, 특정 검사의 경우 기존의 분리된 IM 시스템보다 우수한 성능을 보였다.
본 논문에서는 몇가지 단점을 보이는 소프트웨어 RSIM 시스템 아키텍처를 개선한 새로운 아키텍처를 제안하였다. 제안한 아키텍처를 사용하여 시스템을 구성하였을 경우 다음과 같은 이점을 취할 수 있다.
- 구성요소의 감소 : RS와 IM을 통합함으로써 4개였던 모듈을 2개로 감소시켜 구조를 간단히 하고 비용을 절감 - Control Station의 제거 : RS와 IM의 동작을 모니터하고 제어하기 위해 존재하는 CS는 이와 같은 아키텍처에서는 더 이상 필요하지 않음. 따라서 비용이 감소하고 아키텍처를 보다 간단히 할 수 있음. - Redundancy의 유지 : 이와 같은 아키텍처를 가지는 통합 SW RSIM 소프트웨어를 두 세트 설치하면 기존과 마찬가지로 가외성을 확보하면서 구성요소를 줄이는 효과 역시 가질 수 있음.- 기준국용 GPS 수신기 수의 감소 : 이 아키텍처 하에서는 큰 비용을 차지하는 기준국용 GPS 수신기의 수를 1/2로 줄일 수 있어 비용을 크게 줄일 수 있음- 운영의 편리성 증가 : RS와 IM을 하나의 소프트웨어에서 관리함으로 복잡한 연결설정을 줄이고 운영을 보다 용이하게 함.
향후, 이 아키텍처를 도입한 소프트웨어 RSIM 시스템을 보다 높은 완성도로 구현하고 실제 DGPS 기준에 설치, 테스트하여 발견되는 단점을 보완한다면 차세대 DGPS 기준국에서 갖고자 하는 장점을 모두 가지고 RTCM에서 요구하는 사항[2] 역시 만족하는 시스템으로써 한국의 DGPS 기준국을 더욱 발전시킬 수 있을 것이라 본다.