Buoy has different motion characteristics depends on the sea weather situations. The motion characteristics has an impact on antenna, solar power generation system and etc. installed within a buoy. Therefore, it is important to analyse motion characteristics for management and analyse the buoy conditions. This paper’s Buoy motion monitoring system uses gyro sensor to detect motions of a light buoy, and the measured data transfers to the PC on the shore using signal processing algorithm. The aim of this research is to develop monitoring and management mechanism of a buoy by applying motion monitoring system. In this paper, the operation characteristic of movement monitoring system is verified through experiment. Further, in this paper, it can apply such as real-time visibility into the status of the buoy or many ocean facility‘s motion estimation of the future.
선박의 안전 운항을 위하여 브이, 등대 등의 다양한 항로 표지가 설치되어 운영되고 있다. 이러한 항로표지는 소형 선박 및 시설물들과의 충돌로 인한 빈번한 안전사고가 발생하고 있다. 그러므로 브이의 유지 관리 및 파손을 감시하기 위한 모니터링 시스템이 필요하다[1].
선박의 안전항로를 확보하기 위해 설치되는 브이와 같은 항로 표지시설이 연안을 항해하는 선박 등의 충돌로 인해서 생기는 금전적 손해 뿐 아니라 그로 인해 생기는 선박의 안전 운행에 지대한 영향을 미치게 된다. 특히 해상에 설치되는 브이는 소형 선박 간의 충돌이 가장 빈번하다. 이러한 브이의 충돌 여부를 감시하기 위한 시스템이 필요하다.
본 논문에서는 브이의 움직임(전후, 좌우 각도)을 관측하여, 정상적인 경우와 비정상적인 경우의 브이상태를 파악하고, 이를 기반으로 안정적으로 브이를 관리하고자 한다. 브이에 설치한 RF(Radio Frequency) RF 통신 시스템을 활용하여 신호를 육상으로 전송하고, 전송된 신호(데이터)는 LabVIEW를 이용하여 데이터를 저장 및 처리하여 브이상태를 파악할 수 있도록 한다[2-3].
브이는 파도에 따라 상하, 좌우 및 회전 운동을 한다. 이러한 브이의 움직임은 불규칙적이다. 그렇지만, 브이의 복원성 및 안정성을 위하여 브이는 과도한 움직임을 억제하기 위하여 계류한다. 하지만 충돌 등이 발생하게 되면 브이는 순간적으로 많은 각도를 움직이게 된다. 심한 경우에는 넘어져서 침몰하는 경우도 있다.
이러한 브이의 상태를 움직임 각도를 측정하여 일정 각도 이상으로 넘어간 상태 및 지속 시간 등을 파악하여 브이의 상태를 파악할 수 있도록 구성하였다. 움직임 각도 측정을 위하여 자이로 센서를 이용하고자 한다.
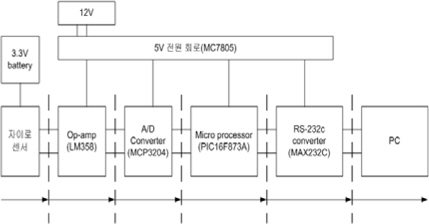
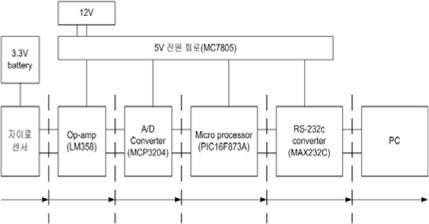
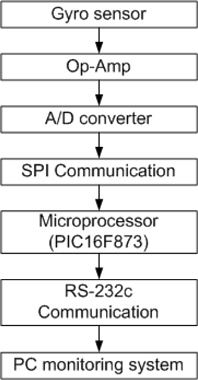
그림 1은 브이 관측 시스템을 나타낸 것이다. 관측시스템은 자이로 센서를 이용하여 각도를 측정한다. 자이로 센서는 단위시간당 속도의 변화를 검출하기 위한 소자로서, 과거에는 기계식의 센서가 이용되었으나 현재에는 반도체식을 이용한 제품이 주류를 이루고 있다. 반도체식의 장점은 소형으로 정밀한 검출이 가능하다.
자이로 센서는 x, y축을 측정 할 수 있도록 구성하였다.
자이로 센서는 미세한 전압, 전류 신호를 출력으로 갖는다. 이러한 신호를 A/D Converter에서 측정하게 되면 A/D Converter의 싱크(Sink) 전류로 인하여 자이로 센서의 출력 전압이 떨어진다. 이를 막기 위하여 Op-Amp의 높은 입력 임피던스 특성을 이용한다[4].
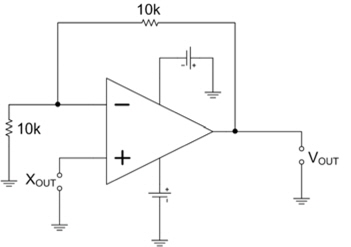
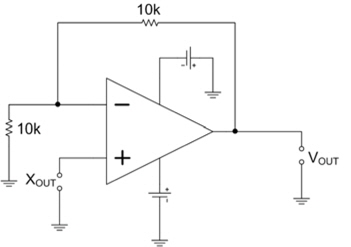
실제 실험에 쓰인 Op-Amp의 회로를 간략하게 그려보면 그림 2와 같다. 증폭도는 식(1)과 같다.
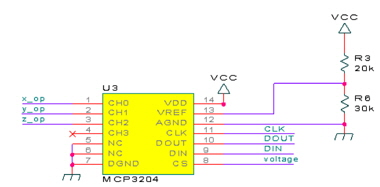
식(1)에서 알 수 있듯이 Op-Amp로 비반전 증폭을 하면 증폭도 값을 2로 가지는 안정된 신호를 얻을 수 있다. 증폭되어진 신호를 A/D Converter에 전송하여 SPI(Serial Peripheral Interface) 통신으로 마이크로프로세서에 신호를 전송하도록 구성하였다.
자이로 센서는 수평으로 있을 때 2.5 V의 출력을 내며, 0~180도로 앞뒤, 좌우의 기울기 값을 관측할 수 있다. 즉 왼쪽으로 기울어지면 0에 가까운 값을 갖고 오른쪽으로 기울어지면 5 V에 가까운 값을 갖도록 되어 있다. 앞뒤 또한 좌우로 움직이는 것도 마찬가지이다.
마이크로프로세서는 SPI 통신으로 A/D Converter로부터 온 신호를 통신 프로토콜로 변환하여 PC로 전송한다.
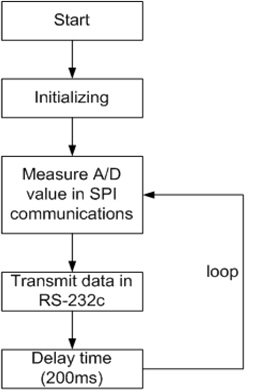
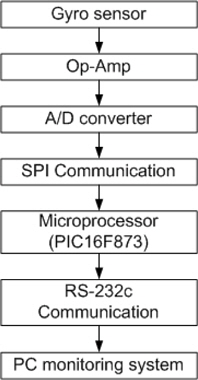
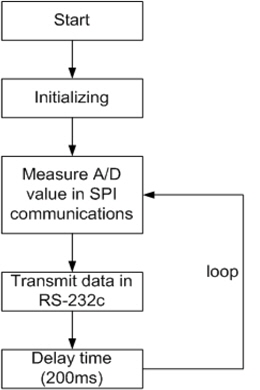
브이 움직임 감시 모듈은 자이로 센서에서 나오는 전압 값을 0.1초 간격으로 취득하여 이를 평균화하여 1초간격으로 PC로 데이터를 전송하도록 구성하였다. 위에서 사용한 자이로 센서는 X, Y, Z 축의 움직임을 감지하여 그것을 전압신호로 변환시켜 송신해 준다. 위에서 송신한 신호는 A/D Converter를 거쳐서 2진수에서 디지털 신호로 변환된 후 SPI통신을 이용해 송신되어진다. 그림 3은 등부표 움직임 감시 모듈의 알고리즘을 나타낸 것이다.
위에서 언급한 바와 같이 자이로 센서에서 나온 신호는 MCP3204(12 bit)를 거쳐서 디지털 신호로 변환되어 SPI 통신으로 데이터가 마이크로프로세서에 전송되어 진다. 이렇게 전송된 데이터를 신호 처리하여 통신 프로토콜로 PC에 송신해 준다. 이때 RS-232c 통신을 이용해 마이크로프로세서에서 나온 신호를 PC에 전송한다.
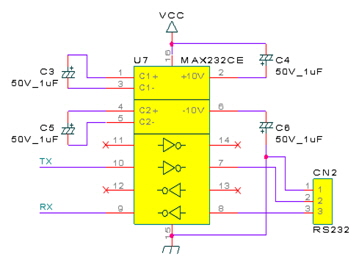
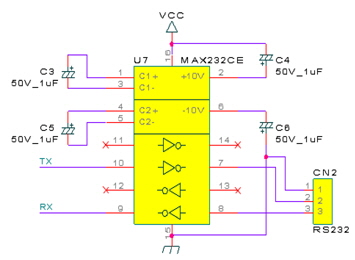
RS-232c 통신은 TTL레벨과는 차이가 있으며, 송수신 신호의 전압레벨 정의 및 시스템과 연결되는 커넥터의 각 핀에 대한 신호로 정의된다. 본 논문에서는 0 V ~ +5 V 단일전원으로 TTL 전압레벨과 RS-232c 전압레벨을 변화시키는 MAX232 소자를 사용하고 있다. MAX232는 입력된 0 V ~ +5 V 단일전원을 내부에서 −10 V ~ +10 V 변화시켜 RS-232c통신을 가능하게 한다. 다음 그림 4는 통신 프로토콜을 나타낸 것이다.
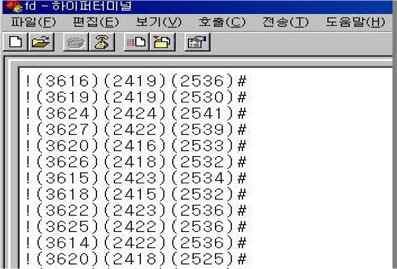
통신 프로토콜은 시작 문자와 종료 문자 데이터들로 이루어지고 데이터를 구분하는 구분 문자로 이루어진다. 12 bit 형태로 데이터를 받기 때문에 데이터 값은 0~4095까지의 값을 갖는다. 움직임이 없을 때의 이 신호의 값은 약 2000 정도가 되며, 자이로의 움직임에 따라 값은 변화하게 된다. 마이크로프로세서에서는 SPI 통신으로 A/D Converter에서 변환된 데이터만을 통신 프로토콜에 맞도록 구성한다. 등부표의 기울기가 변하면 감시 모듈의 자이로 센서에서 기울어진 정도를 측정할 수 있다.
브이 움직임 감시 모듈의 통신 시스템은 그림 5와 같이 구성된다. 먼저 해상의 브이에 모니터링 시스템을 설치한 다음 움직임을 관측한다. 브이의 움직임을 측정하여 얻은 데이터를 RS-232c 통신을 이용하여 무선 모뎀으로 전송한다. 그 후 무선 모뎀에서 받은 신호는 RF 신호로 변환되어 육상으로 전송되어지고 육상에서는 모뎀으로 이 신호를 받아서 분석한다.
본 연구과정에서 통신은 프로토콜에서 데이터를 단순히 수치 값으로 변환하여 전송하였다. 그렇기 때문에이 단순한 수치 값을 다시 각도로 변환하는 과정이 필요하다. 그래서 통신 모뎀 데이터를 RS-232c 형태로 변환하여 PC로 전송시켜 LabVIEW를 이용하여 데이터를 분석하였다. 등부표 움직임 감시 모듈이 설치될 때 바로 초기 각을 가질 수 있으므로 이를 고려하여 모니터링 될 수 있도록 하였다. 또한 모니터링 시스템에서 움직임 각도를 설정하여 일정 각도 이상으로 각도가 변화하게 되면 경보를 발생하도록 하였다.
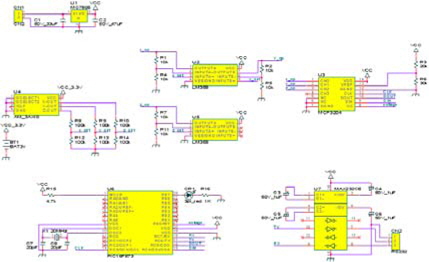
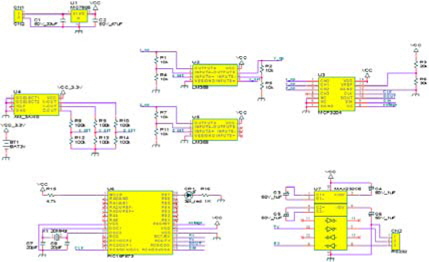
앞서 설명한 브이 관측 시스템을 다음과 같은 형태로 설계하였다. 실제 설계에서 부표에 사용되는 12 V전원을 사용할 수 있도록 12 V의 축전지 전원을 사용하였다. 자이로 모듈의 경우 저 전력을 사용하기 때문에 소형 축전지를 사용하였고 향후 상용화를 대비하여 3 V용 레귤레이터를 사용하여 12 V의 축전지 전원을 그대로 사용 할 수 있는 회로를 구성하고자 한다. 그림 6은 전체 회로도를 나타낸 것이다.
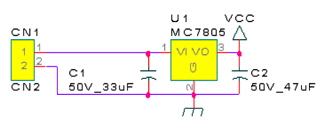
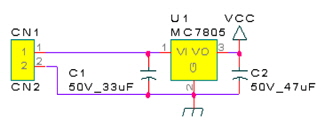
그림 7은 정전압 IC의 회로도이다. CN1, CN2에서 전원을 공급받아서 정전압 IC인 MC7805로 5 V의 일정한 전압을 가진 전류를 가속도 센서에 공급 하였다.
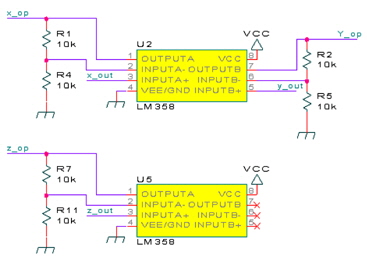
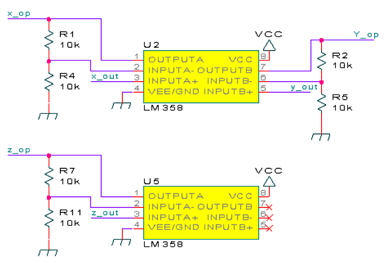
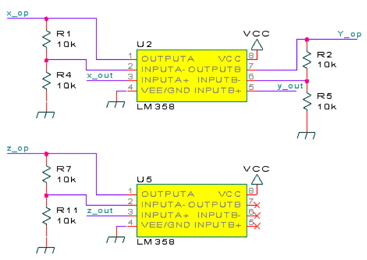
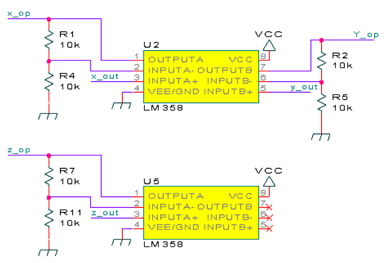
그림 8은 자이로 센서의 회로도이다. 자이로센서 AM_3AXIS는 저전력을 사용하기 때문에 BT1측에 3 V 배터리를 장착시켜서 자이로 센서에 전원을 공급하였다. 자이로 센서에서 나온 출력 값은 분압회로를 통하여 1/2로 줄어든 다음 Op-Amp인 LM358로 간다.
증폭도가 2배가 되어 자이로 센서에서 나왔던 원래의 신호 값인 XOUT이 출력되어 MCP3204로 들어가게 된다. 실제로 회로를 설계했을 때 LM358 없이 자이로 센서에서 바로 A/D Converter로 신호 값을 보냈을 때 낮은 임피던스로 인해 A/D Converter로 들어가는 Source 전류가 Sink 전류로 빠져버려서 제대로 작동하지 않았다. 이를 해결하기 위하여 자이로 센서와 A/D Converter 사이에 Op-Amp를 설치했다. Op-Amp는 입력 임피던스가 무한대이기 때문에 Op-Amp 내부로 전류가 흐르지 않고 자이로센서 출력 측에 있는 분압 회로에 의해 절반으로 줄어든 전압이 다시 증폭되어 A/D Converter로 들어가게 된다. 이 때 들어가는 전류신호는 Op-Amp 내부에 있는 전압원에서 나가게 된다.
이러한 원리로 자이로 센서에서 출력되는 신호 전압을 그대로 사용할 수 있게 하였다.
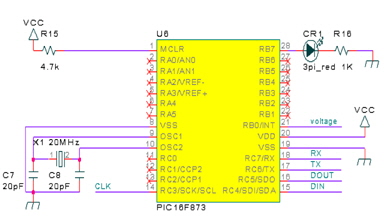
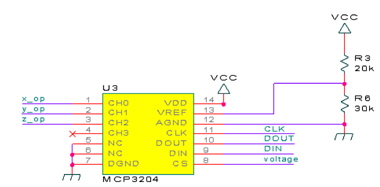
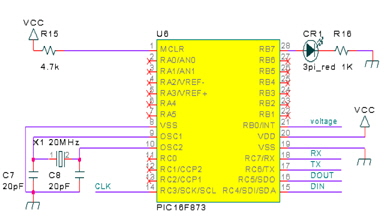
자이로 센서에서 측정한 값은 A/D Converter MCP 3204를 통해서 디지털신호로 변환되어 마이크로프로세서 PIC18F873으로 보내진다.
이 때 실험에서 사용한 통신 방법은 RS-232c 통신 방식을 사용 하였고 Main Computer로는 일반 PC를 사용했다. 그림 12는 실제 통신을 위한 회로도이다.
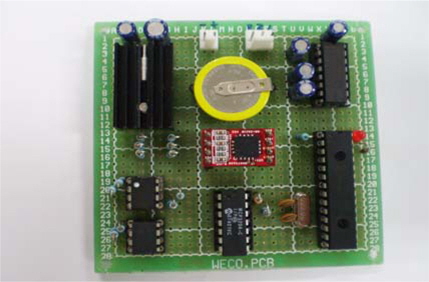
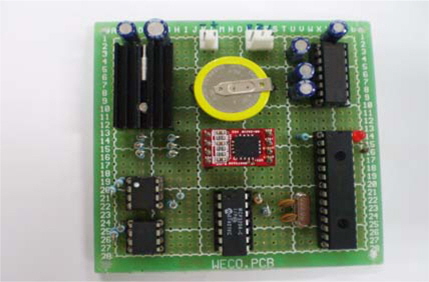
그림 13은 실제 실험에 사용했던 자이로 센서 회로이다. 자이로 센서를 회로에 중앙에 설치하여 회로판이 움직일 때마다 신호 값을 측정할 수 있도록 구성하였다.
브이 움직임 모니터링 시스템은 등부표 움직임 감시 모듈 회로에서 데이터를 무선 통신을 통해 취득하여 PC로 전송시켜 LabVIEW를 이용하여 데이터를 분석한다. 모니터링 시스템의 내부 프로그램 구조는 크게 데이터 취득, 분석, 표시 등의 3개의 단계로 구성되어 있다.
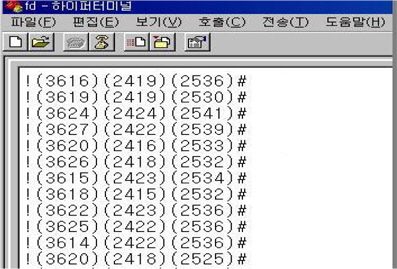
그림 14는 하이퍼터미널이라는 무선 통신 프로그램을 이용하여 등부표 움직임 감시 모듈회로로부터 나온 데이터 값을 PC로 전송하는 모습을 보여주고 있다.
모니터링 시스템의 화면 인터페이스는 LabVIEW를 이용한 GUI(Graphical User Interface)기반의 화면 인터페이스로 구성하였다.
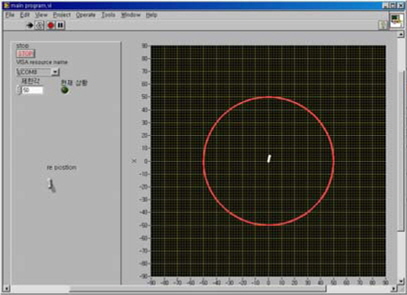
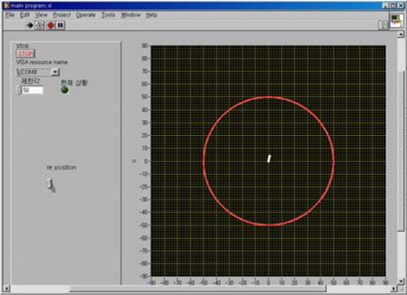
그림 15는 모니터링 시스템의 사용자 제어 화면을 나타낸 것이다. 화면에는 x, y 축으로 중심축이 얼마나 움직였는지를 알 수 있도록 화면에 구성하였다.
모니터링 화면에서 사용자는 일정 각도 범위를 주어 모듈이 기울어질 경우 이를 알 수 있도록 구성하였다. 또한 사용자가 일정 각도를 지정 할 수 있도록 하여 사용자가 지정한 각도 이상으로 각도가 변화하면 경보가 발생하도록 시스템을 구성하였으며, 각도가 변하는 정도를 실시간으로 알 수 있도록 구성하였다.
본 논문에서는 브이를 가정한 모형 기관을 제작하여 실험을 통하여 기관의 전후, 좌우측의 기울기에 따라 출력되는 전압의 크기를 모형 기관을 통해 측정 할수 있었다. 실제 브이가 자연의 영향이 아닌 인위적인 힘, 즉 충돌 등의 영향으로 기준 이상의 기울기로 기울어 졌을 때 기준 값 이상의 전압이 출력되어지고 이 전압신호는 통신체계를 통하여 육상으로 전달된다. 이러한 과정을 효과적으로 구현하기 위해 구성한 하드웨어 및 알고리즘 등이 연구목적에 적합하게 구현되었다.
향후, 육상에서는 등부표에 관한 사고 정보를 모니터링 시스템을 통하여 데이터를 신속하게 전달 받고, 곧바로 적절한 조치를 취할 수 있도록 하였다. 항로표지의 파손은 금전적인 피해를 발생시키고 나아가서는 선박의 안전운항을 방해하기 때문에 파손되어 졌을 때 신속한 조치가 필요하다. 본 연구를 통하여 확보된 연구 결과 활용하면 브이의 상태를 실시간으로 파악할 수 있을 것으로 생각한다.