When ships or underwater objects move through water, whose impedance is much higher than that of air, small vibrating motions of the inner ship body can cause remarkable noises in wide frequency ranges. No single analysis method of the noise phenomenon can be effectively applied to all ranges of noise problems. At low frequency ranges, the analysis of vibration problems is analyzed by the conventional methods such as the Finite Element Method (FEM) and Boundary Element Method (BEM). But, at high frequency ranges, those methods require more computation time and costs, and thus alternative methods are needed.
Among many alternative methods, EFA has received much attention. This method was introduced by Belov et al. (1997) in 1997. Nefske and Sung (1989) implemented Energy Flow Finite Element Method (EFFEM) to solve the transverse vibration of a beam. Wholever and Bernhard (1992) derived the energy governing equation for diverse vibrating waves of a beam. Bouthier and Bernhard (1992) derived the energy governing equation of a flexural wave, considering only the far-field component of the transverse vibration of a membrane and thin plate. They expanded the research of EFA to vibration problems of twodimensional structures. Cho (1993) researched the energy boundary condition in the connection point between elements of a beam by applying the wave transmission approach to a complex structure. Park (1999) and Park et al. (2001) derived the energy governing equation for an in-plane wave of a thin plate and studied the spatial distribution and transmission path of vibration energy for a plate structure, which is connected at a non-determined angle. Seo et al. (2003) expanded the application of EFA to beam-plate coupled structures. Lee et al. (2008) applied EFBEM to the vibration analysis of beam and plate problems. Also Wang et al. (2004) applied energy boundary element formulation to the sound radiation problems.
In this paper, the energy governing equation having spherical wave property is developed in open field. And the directivity effect which is represented in high frequency range problems but can’t express in EFA is studied. And the fundamental solution and energy governing equation for underwater problems are developed. The developed equation and directivity effect are applied to the simple case and the results are compared with commercial noise analysis program, SYSNOISE and reliable results are obtained.
ENERGY GOVERNING EQUATION FOR RADIATING NOISE ANALYSIS
In a linearly elastic medium, the energy balance equation is derived from the following Eq. (1). The amount of incoming and out coming power through the surface of an object and the rate of change of the total energy in the object are same. From this fact, energy balance equation is represented as follows:

where,

is the displacement vector at the boundary of an object, CS.

is a small area vector perpendicular to the surface of the boundary.

where,

is the intensity, the power per unit area. In Eq. (1), the first integral on the right hand side is rewritten with the application of Gauss’s theorem as follows:

Therefore, the energy balance equation in the volume of an object is obtained by

From Eq. (4), the energy balance equation for a small volume is expressed by

Eq. (5) is the energy balance equation for all elastic mediums, steady state and transient state. For a steady state elastic medium, the rate of energy density with respect to the time is zero; the left term in Eq. (5) is zero. Therefore, the steady-state energy balance equation is represented as follows:

From Eq. (6), the input power due to the exterior exciting force is expressed as the sum of the power lost in the object and the power flowing out the adjacent medium.
The loss of vibration energy can be represented by a damping structure model. Cremer et al. (2004) showed that energy density loss,

If the inner damping coefficient

where, < > means the time average. The time average of power loss during one period, <

Eq. (9) is the energy loss equation, which is derived from the application of structural damping to any point on an elastic medium vibrating at frequency
ENERGY GOVERNING IN UNDERWATER RADIATING NOISE ANALYSIS
>
Energy transmission equation in underwater radiating noise analysis
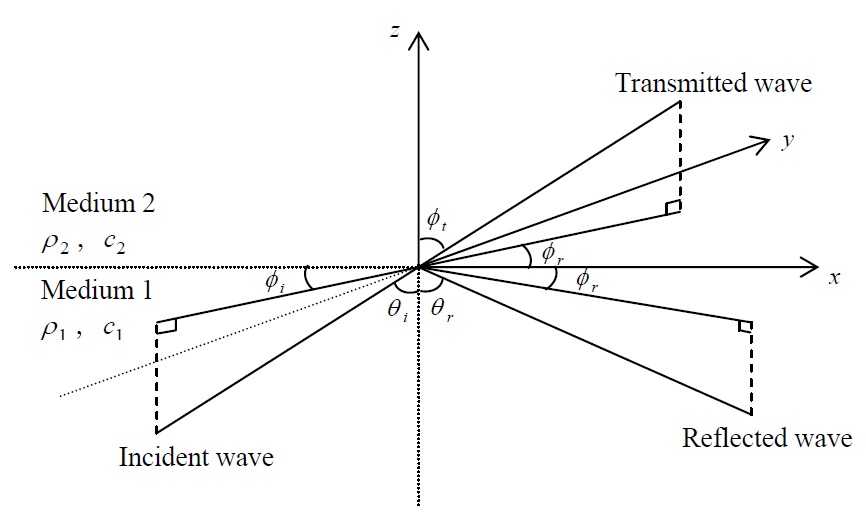
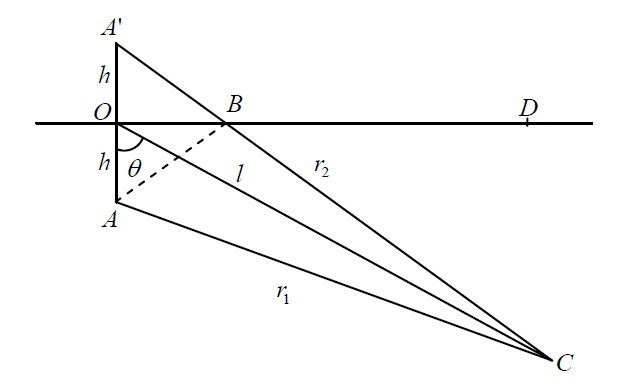
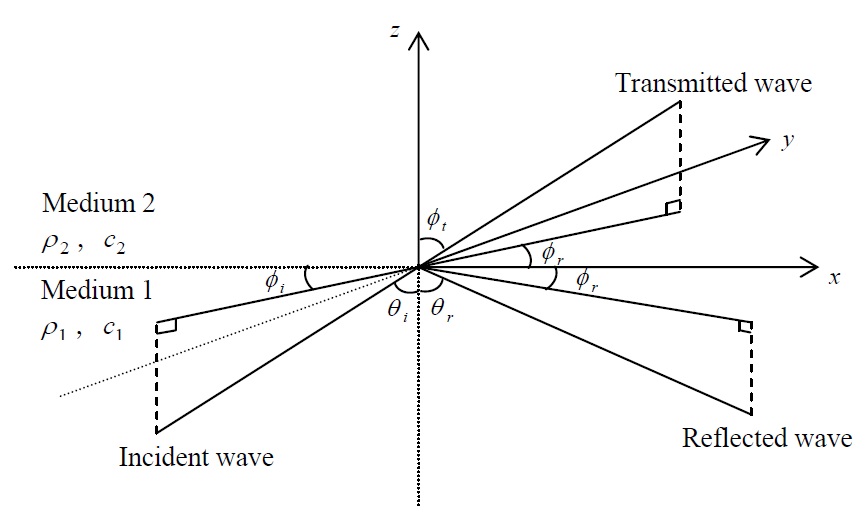
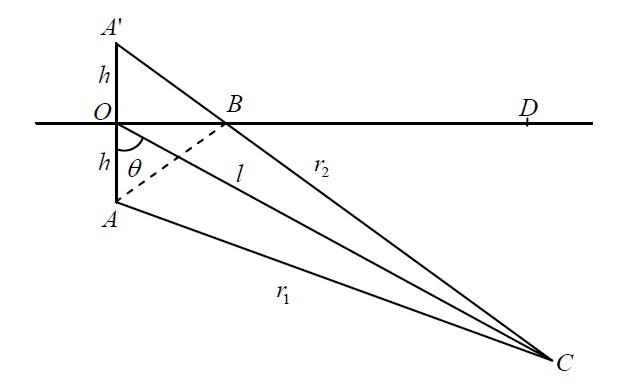
For analyzing the radiating noise problems underwater, we must consider the effect of free surface. According to Fig. 1 and reflection coefficient of surface, spherical wave in underwater is represented as follows:

where,
is the wave number considering the damping effect.
Therefore, energy density and intensity can be expressed as follows for a far-field with low damping:


From Eqs. (11) and (12), the following energy transmission equation can be obtained as follows:

where,
>
Energy governing equation in underwater radiating noise analysis
From the energy balance equation, Eq. (6), the energy loss equation, Eq. (9), and the energy transmission equation, Eq. (13), the energy governing equation can be obtained as follows:

Eq. (14) is the energy governing equation representing the property of a spherical wave and including the effect of the water surface.
DERIVATION OF THE FUNDAMENTAL SOLUTION IN UNDERWATER RADIATING NOISE ANALYSIS
The fundamental solution

Fundamental solution

When intensity boundary condition is applied to Eq. (16), the value of

In the left term of Eq. (17), the integral of

is equal to one, because of the property of the Dirac delta function,

In the right term of Eq. (18),

From Eq. (19), we know that the non-determined constant
Therefore, the fundamental solution representing the relation between the virtual source and energy density or intensity is as follows:

Eq. (20) is the fundamental solutions having the property of a spherical wave and incorporating the effect of the water surface.
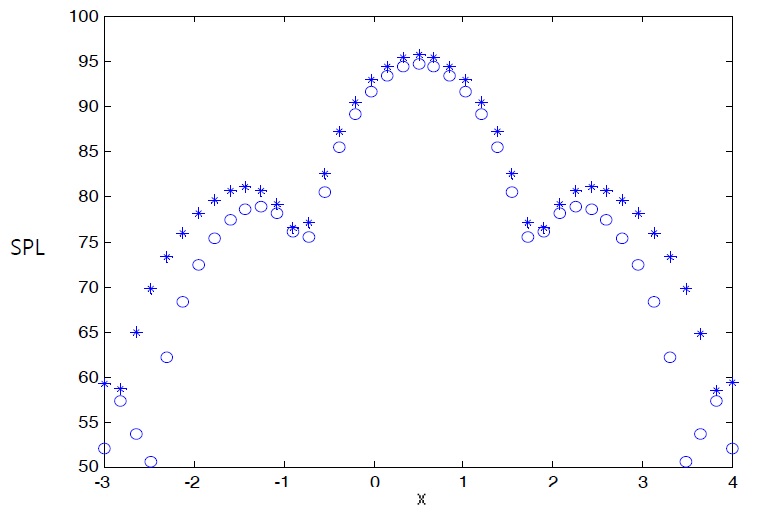
BEM which is one of traditional noise analysis methods shows the noise’s directivity pattern at high frequency ranges. This is caused by the difference of wave’s phase. But EFA doesn’t show the noise’s directivity pattern, because EFA doesn’t have the phase information. So representing the noise’s directivity, the directivity factor is developed.
When n sources are existed, the energy is as follows:
Here
is newly added. This equation can be divided to two terms as follows:

From Eqs. (21) and (22), the following equation can be obtained as follows:

where
is directivity factor.
ESTABLISHMENT OF BOUNDARY INTEGRAL
>
Establishment of boundary integral for indirect method
In the indirect method of the boundary element, the real system of finite size is extended to the infinite field and the virtual source is assumed to exist on the boundary of the real system. And energy and intensity in the concerned field are obtained by using fundamental solution as the sum of the effects due to virtual sources. Based on this concept, in three-dimensional problems, equations of energy density and intensity are obtained in the concerned field as follows:


where,

indicates a field point of the concerned field.
means the position of the virtual source on the boundary.

is the location of input power.

means the virtual source on the boundary surface. The virtual source on the boundary surface,

can be obtained by using Eqs. (24) and (25) according to the property of the boundary condition. If
approaches the boundary surface, the boundary integral of the right term in Eqs. (24) and (25) has a singular integral whose point is centered on the boundary surface. This point is the identity of

Therefore, the integral term of the Eq. (24) is divided into the following terms as follows:

where, if the boundary of the concerned field is a smooth curve surface, the boundary surface

where, if the radius

And if radius

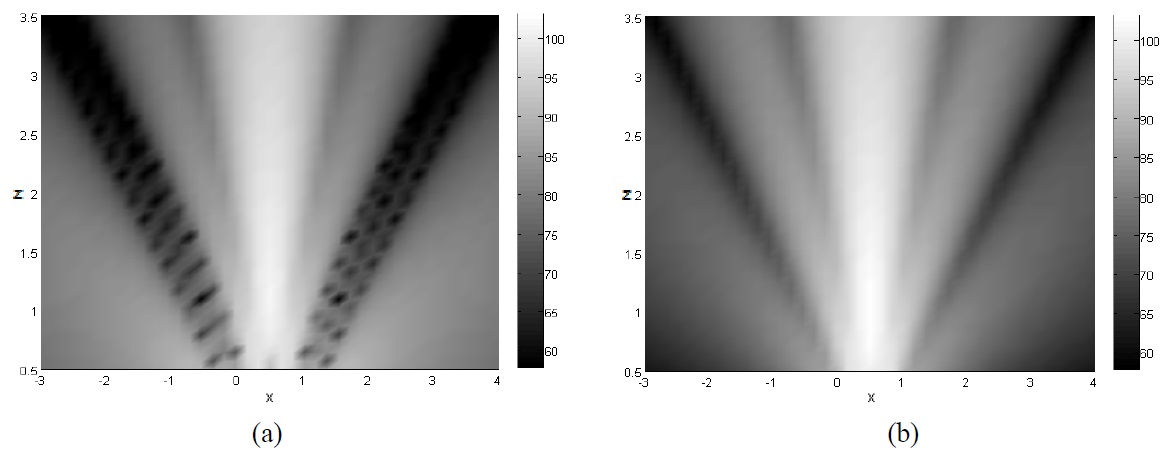
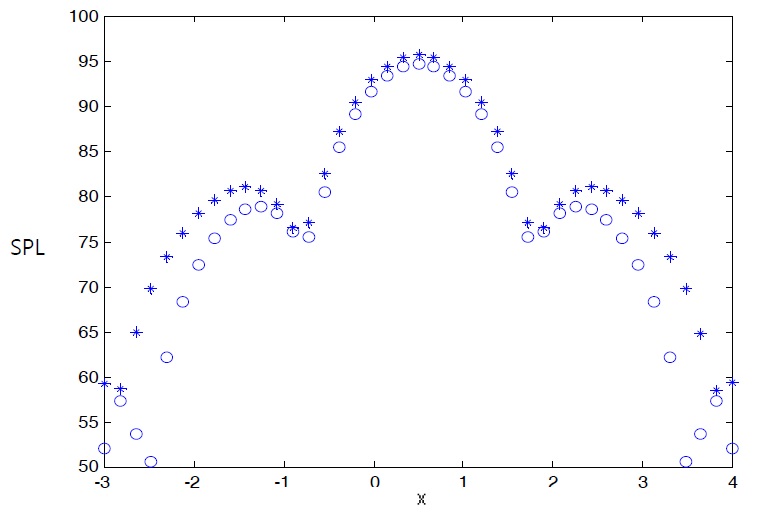
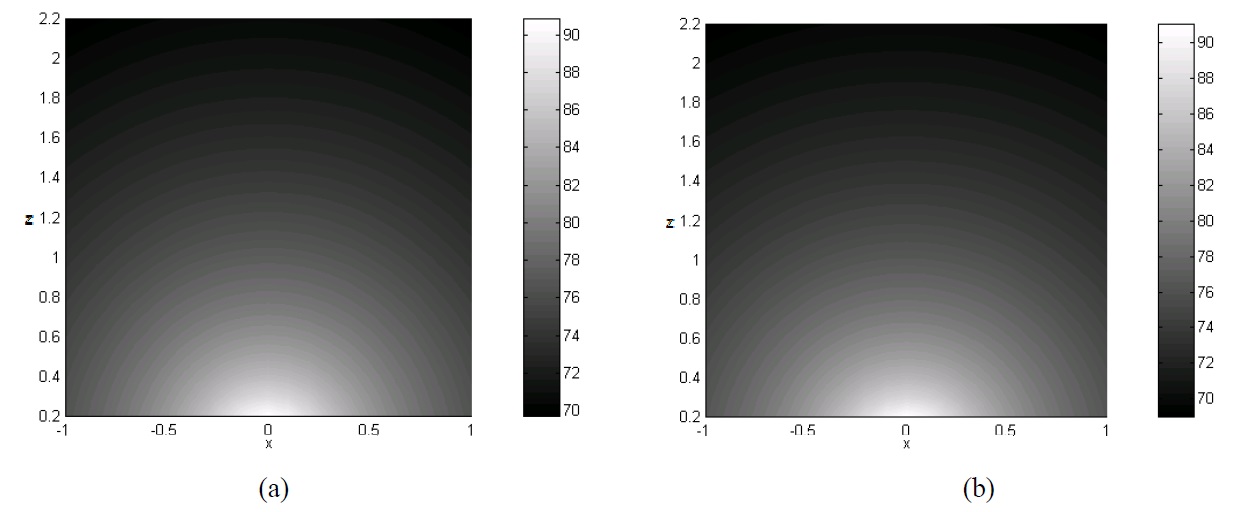
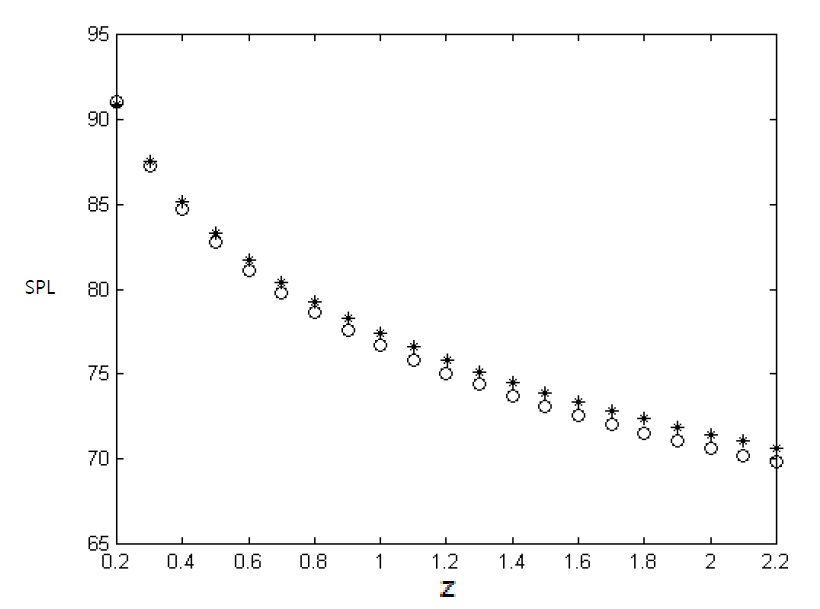
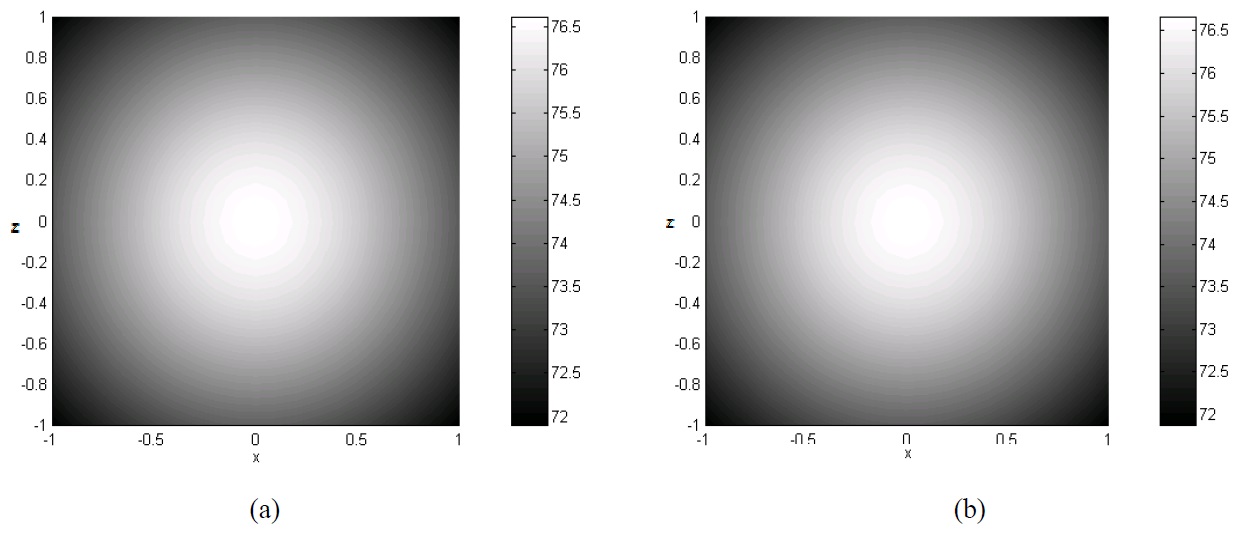
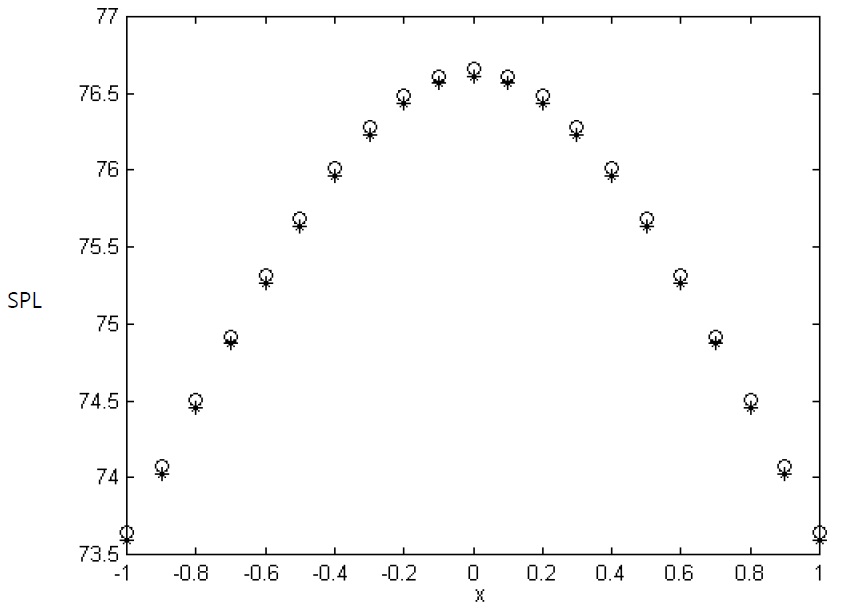
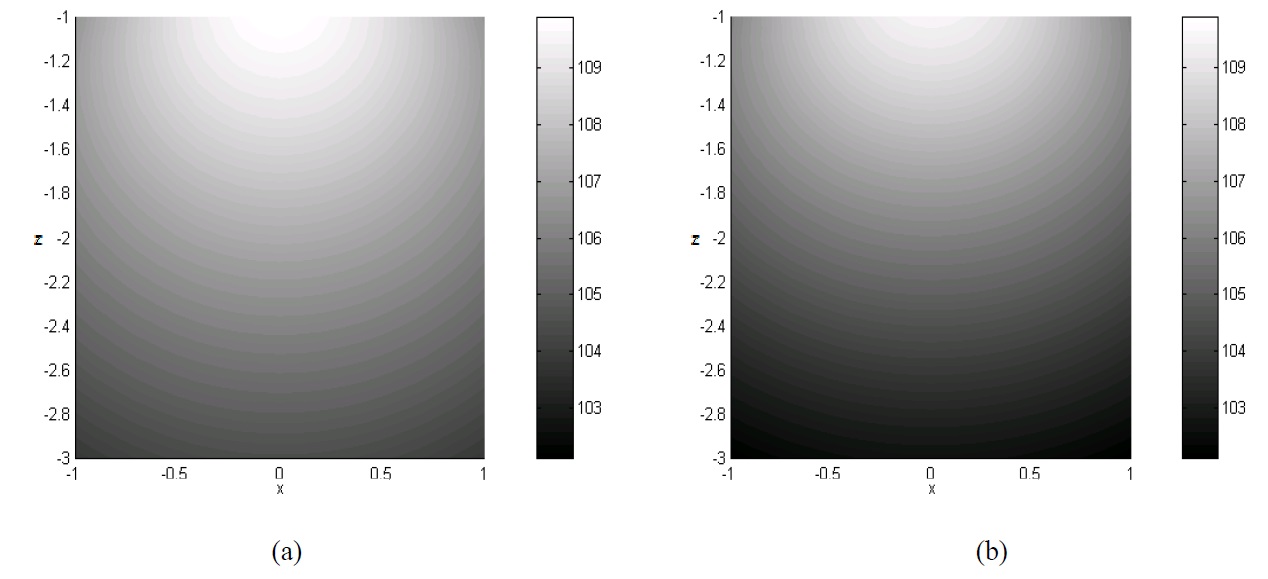
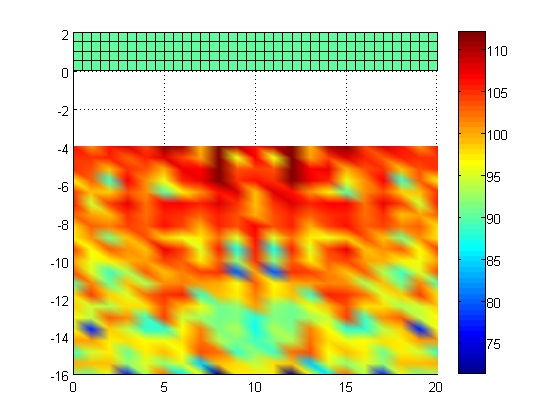
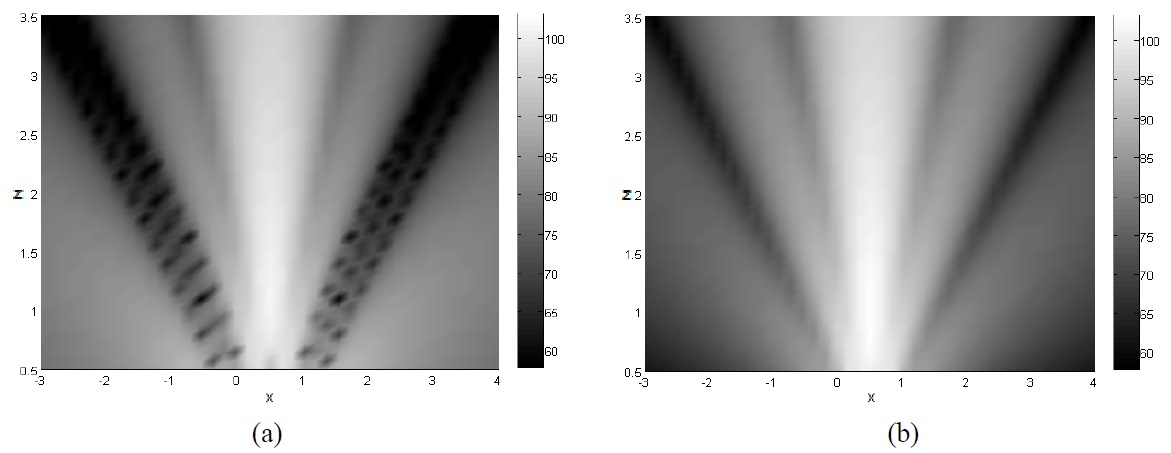
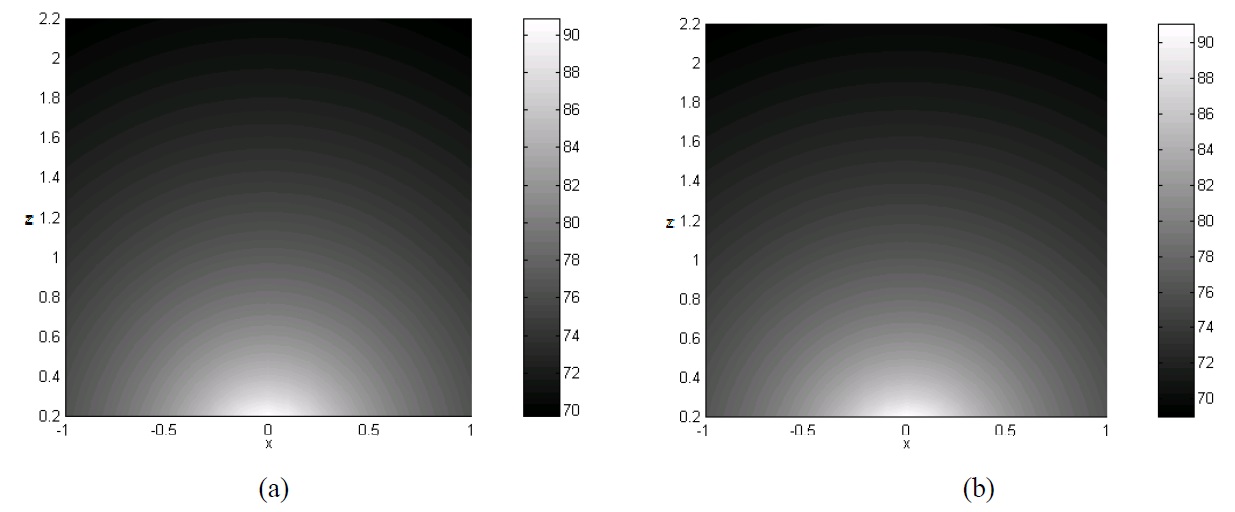
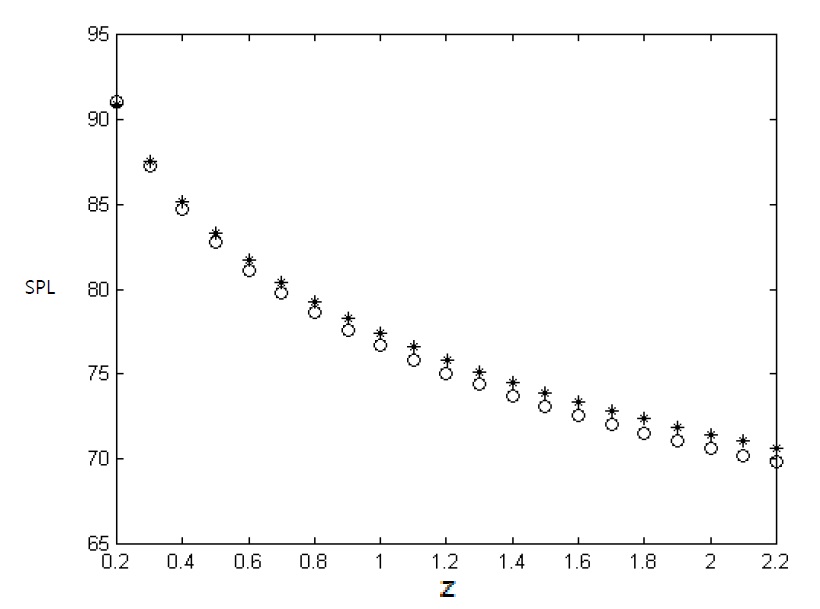
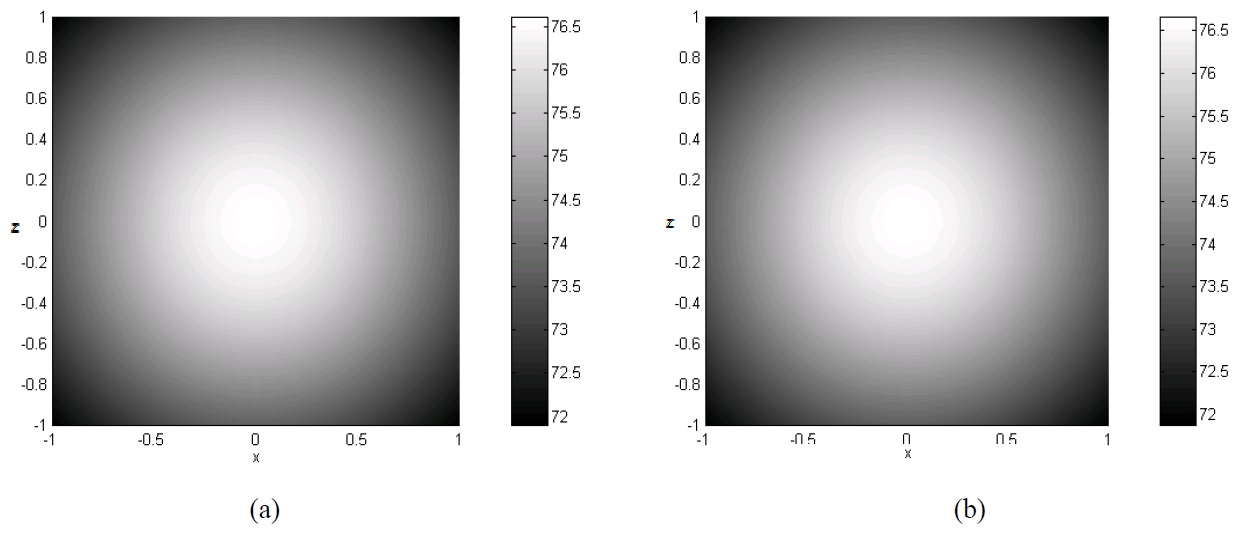
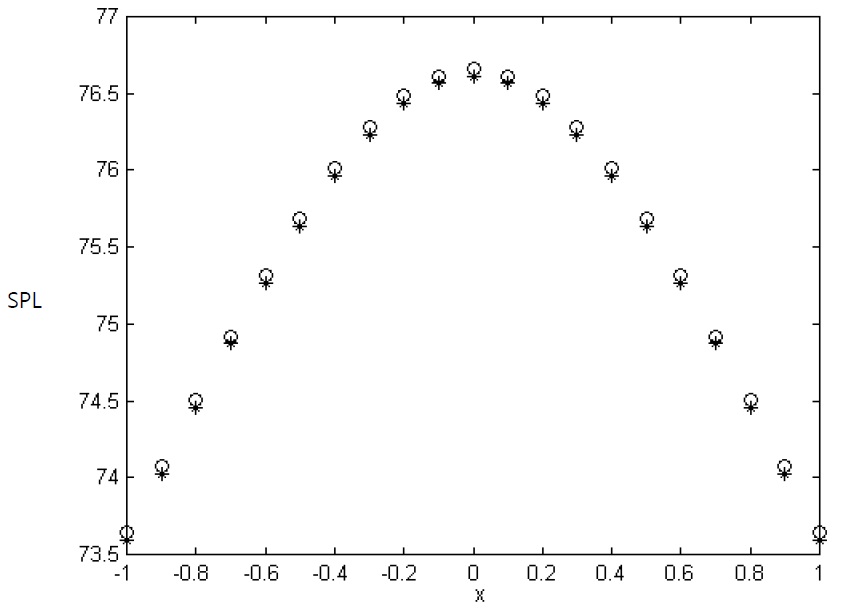
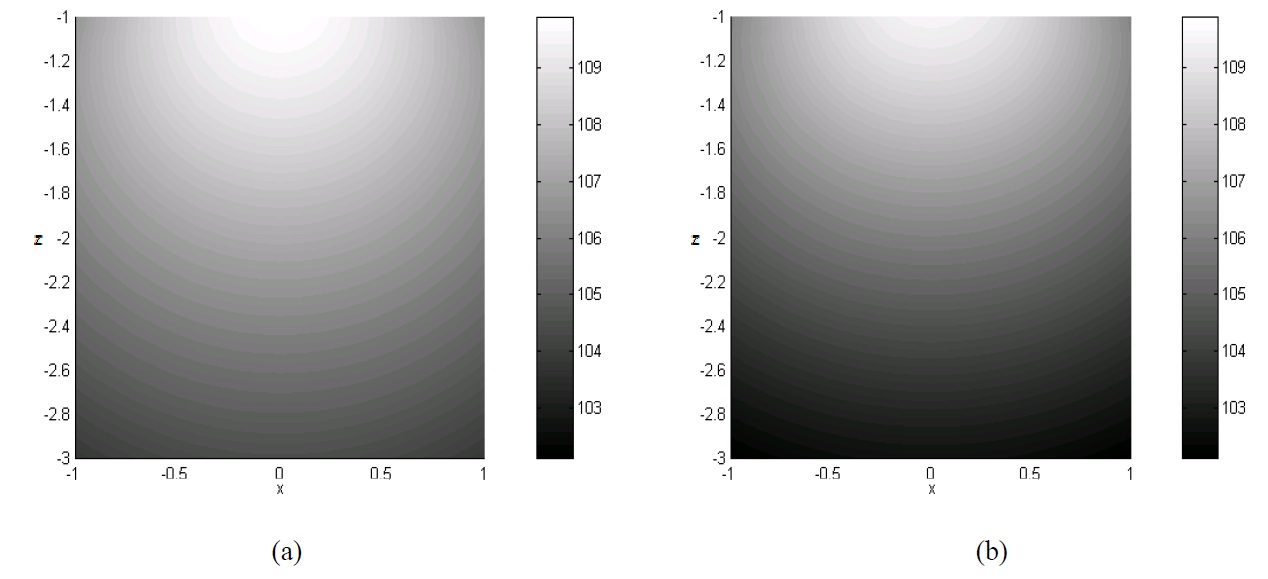
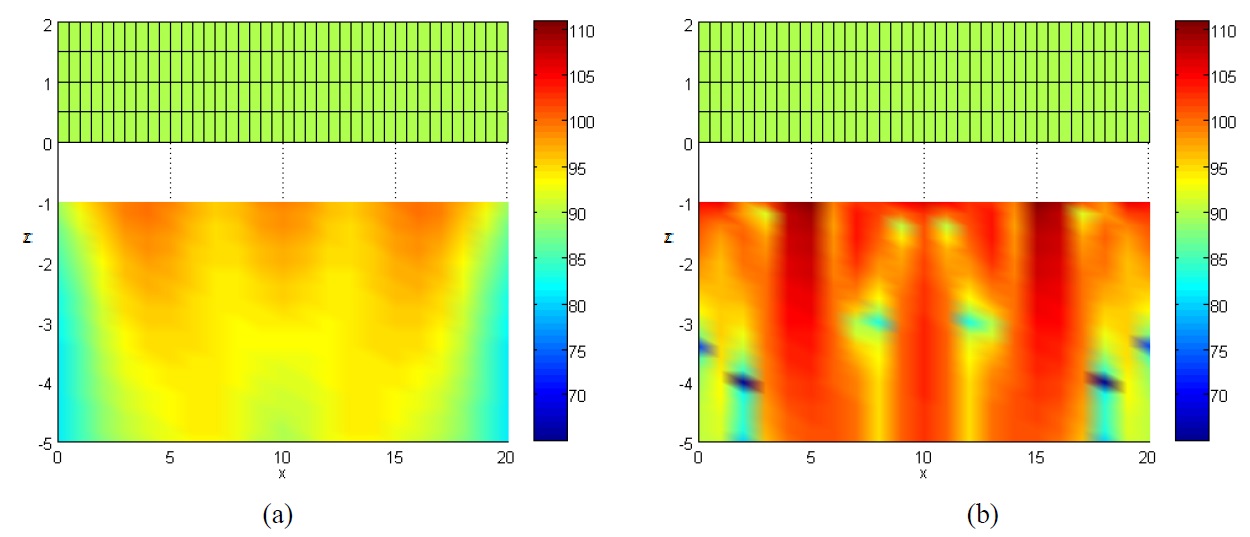
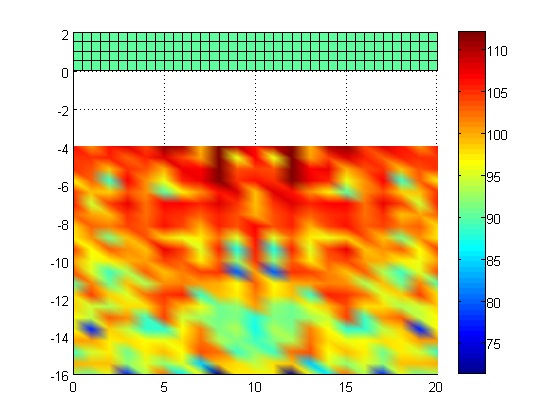
EFA is developed by assumptions which are high damping value and medium-to-high frequencies. According to these assumptions, the nearfield evanescent waves can be neglected. So EFA’ s result is not good agreement with a classical solution at low damping values, because the effect of nearfield waves will be affected on the vibration phenomena in low damping system. Therefore EFBEM will be applied to the high damping systems. To verify the accuracy of the developed works, the boundary integral of indirect EFBEM was applied to the radiating noise problems of structures with the vibration of a simple plate model and a simple sphere model in open field and underwater. And the result of the indirect EFBEM was compared with that of SYSNOISE. Figs. 3 and 4 show energy density distribution, respectively, in the z-direction by SYSNOISE and indirect EFBEM when the plate which size is 1
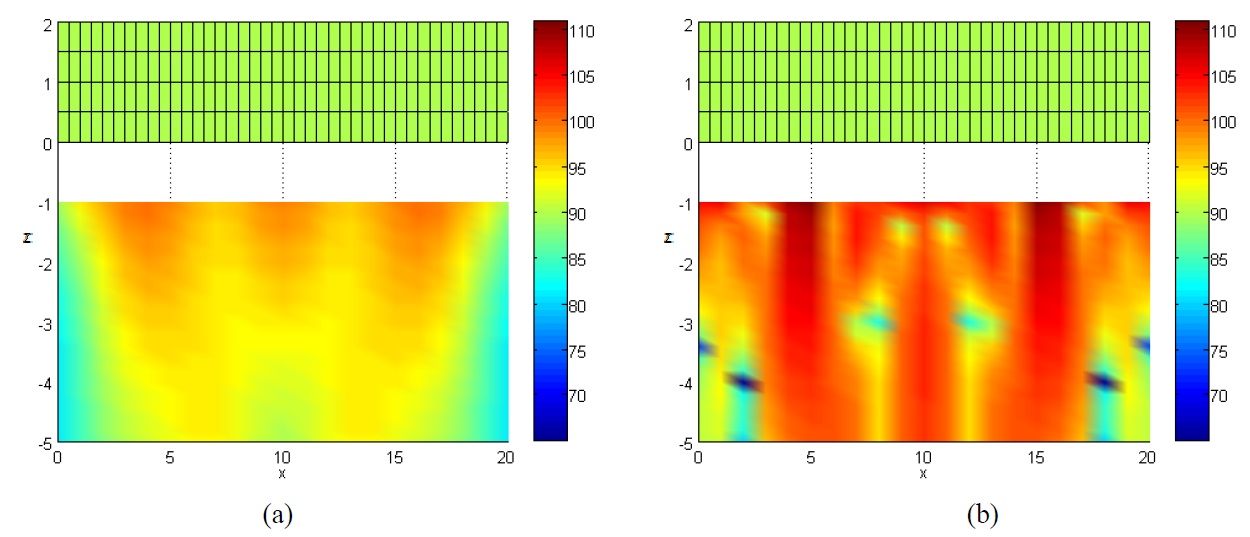
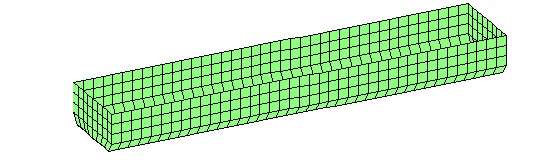
This paper analyzed radiating noise problems in the medium-to-high frequency range. The energy governing equation and fundamental solutions having the spherical wave property were developed. And the directivity which was the property of high frequency analysis but couldn’t represent in existing EFA, was developed. Also, the fundamental solutions representing the effect of the water surface were developed for the underwater radiating noise problems. Last indirect EFBEM applying BEM to EFA was developed for this analysis. To verify the developed works, the results of the indirect EFBEM were compared with those of commercial code, SYSNOISE in open field. For plate, the directivity was represented similar shapes in SYSNOISE and developed indirect EFBEM. And the directivity was vanished for sphere model. Also the effect of the water surface was examined by the comparison of the results between indirect EFBEM and SYSNOISE for an underwater case. These comparisons showed satisfactory results and developed indirect EFBEM is applied to barge type structure at high frequency.