The flight control of re-entry vehicles poses a challenge to conventional gain-scheduled flight controllers due to the widely spread aerodynamic coefficients. In addition, a wide range of uncertainties in disturbances must be accommodated by the control system. This paper presents the design of a roll channel controller for a non-axisymmetric reentry vehicle model using the trajectory linearization control (TLC) method. The dynamic equations of a moving mass system and roll control model are established using the Lagrange method. Nonlinear tracking and decoupling control by trajectory linearization can be viewed as the ideal gain-scheduling controller designed at every point along the flight trajectory. It provides robust stability and performance at all stages of the flight without adjusting controller gains. It is this “plug-and-play” feature that is highly preferred for developing, testing and routine operating of the re-entry vehicles. Although the controller is designed only for nominal aerodynamic coefficients, excellent performance is verified by simulation for wind disturbances and variations from -30% to +30% of the aerodynamic coefficients.
A(t), B(t), Az(t) = state-space system matrices
x(t) = state vector
u(t) = input vector
y(t) = output vector

= nominal state
?(t) = nominal output trajectories
?(t) = nominal control

= state error
ulc=u-? = tracking error control input
M = mass of maneuvering re-entry vehicle (MaRV) exclusive of moving mass
m = mass of moving-mass element
V= velocity of MaRV
pb = relative position of mass with respect to body coordinate system
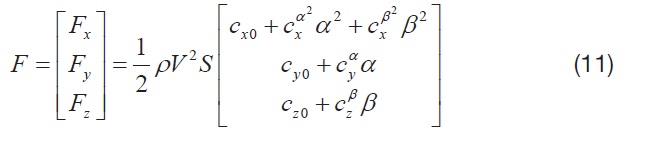
F = net aerodynamic force on twobody system
G = gravitational force on two-body system
ρ = air density
S = characteristic area
α = angle of attack
β = sideslip angle
Cx0, Cxα2, Cxβ2 = resistance coefficients
Cy0, Cyα = lift coefficients
Czo, Czβ = lateral force coefficients
ω = angular velocity
? = pitch angle
ψ = yaw angle
γ = roll angle

= the direction-cosine matrix from body coordinate system to ground coordinate systemg
J = moment of inertia of MaRV with respect to body coordinate system
Jm = moment of inertia of moving mass with respect to body coordinate system
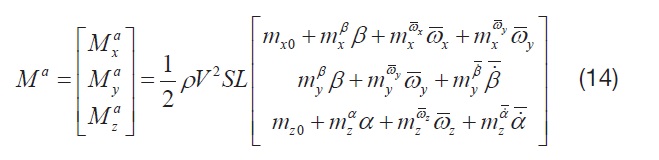
Ma = net aerodtnamic moment about MaRV's center of mass
L = characteristic length

= roll moment coefficients
= yaw moment coefficients

= pitch moment coefficients
μ = reduced mass parameter
ρi,k(t)(k=1, 2) = PD spectrum
ζi, ζ = constant damping
ωni(t), ω(t) = time-varting bandwidth
λ1, λ2 = time-varying paramenters
Superscripts:
g = ground coordinate system
b = body coordinate system
Increasing emphasis has been placed on the need for maneuvering re-entry vehicle (MaRV) designs, since future missions for atmospheric re-entry vehicles are facing the problem of a complex environment, short action time, severe weight and volume constraints on actuation and instrumentation. The simplicity of a moving-mass roll control system (MMRCS), combined with its unique ability to provide roll control from within the MaRV's protective shell, make it an attractive alternative to more traditional aerodynamic or thruster-based roll control systems [1]. The purpose of this paper is to present the roll controller using trajectory linearization control (TLC) method that can handle the uncertainties in disturbances and modeling of many modern control problems as exemplified by the controller for a MaRV.
The governing equations of motion of a coupled MaRVmoving mass two-body system are derived using the Lagrange method [2,4,5]. The mathematical model has a clear physical meaning and is free from force analysis. Classical control theories, such as PID, can barely meet the needs of MMRCS due to the nonlinearity, coupling and time-varying characteristics of the mathematical model. So modern control methods, such as optimum control [1], quadratic programming [5], and
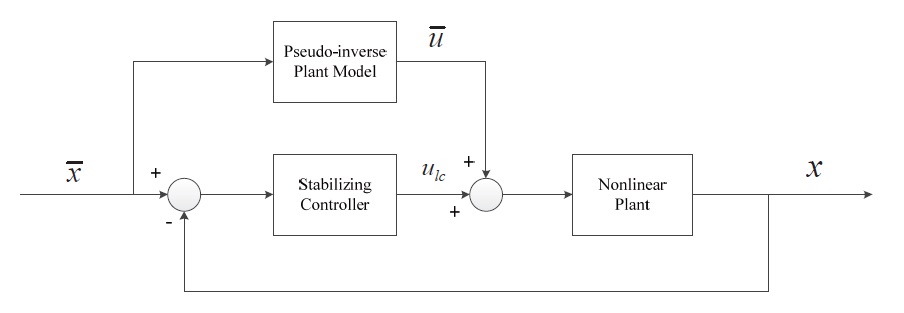
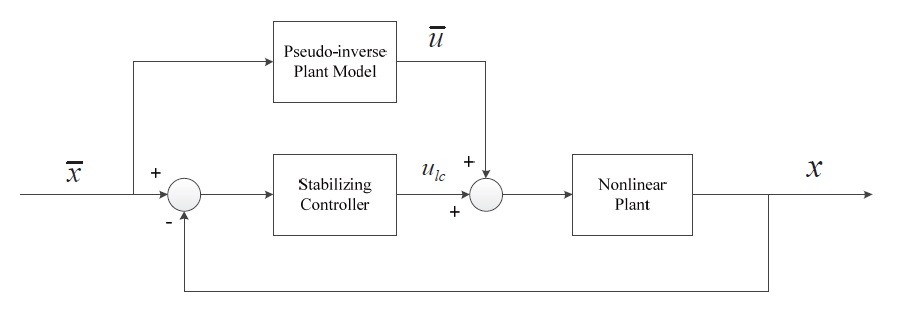
TLC is an effective nonlinear control method and it has been successfully applied in the control systems of missiles [7,8,10], robots [12] and X33 vehicle[13]. The design procedure of TLC consists of the design of two controller subsections. The first one is designed to put the vehicle on the desired trajectory by inverting the nonlinear plant. The second one is a PD-spectrum assignment controller that exponentially stabilizes the linearized tracking error dynamics. This method provides closed-loop global exponential stability without disturbances and gains the maximum robustness against disturbances. The original mathematical model of the nonlinear system is not suitable for analysis, because TLC is based on affine nonlinear systems. So the simplified roll channel dynamic equation derived from the original mathematical model is used to design the controller. Although the controller is designed only for nominal aerodynamic coefficients, excellent performance is verified by simulation for wind disturbances and variations from -30% to +30% of the aerodynamic coefficients.
Suppose the nonlinear system is described by

where


Define the state errors and the tracking error control input by

Asymptotic tracking can then be achieved by a 2 Degree-of-Freedom (DOF) controller consisting of: (i) a dynamic inverse I/O mapping of the plant to compute the nominal control function
Since nominal state
and nominal input

where

Assumption 1 Let
With the assumption that the tracking errors e are small by performance requirement, the tracking error dynamics can be linearized along the nominal trajectory as

where


Assumption 2 The system (5), (
Suppose the linearized error dynamics (5) satisfy Assumption 1 and Assumption 2. Then, there exists a LTV state feedback

that can exponentially stabilize the system (5) at the origin by assigning to the close-loop system the desired PD spectrum[11], where

According to Theorem 3.11 in Ref [15], nonlinear error dynamic along the nominal trajectory is also exponentially stable at the origin. Thus, the system can be exponentially stabilized along the nominal trajectory.
The detailed design procedure and theory for PD-spectrum assignment is presented in Ref [11], along with guidelines on the selection of the closed-loop PD-spectrum. According to Theorem 3.1-5.2 in Ref [11].
where
If the subsystem

is a second-order system, the PD spectrum
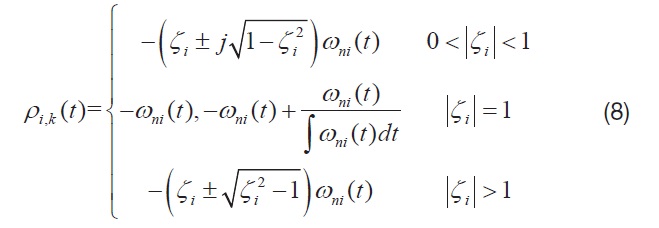
where

3. Governing Equations of Motion
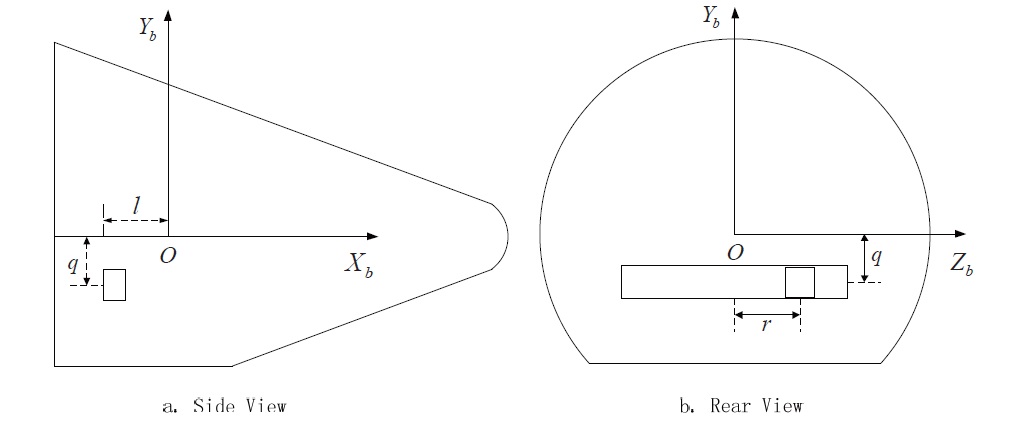
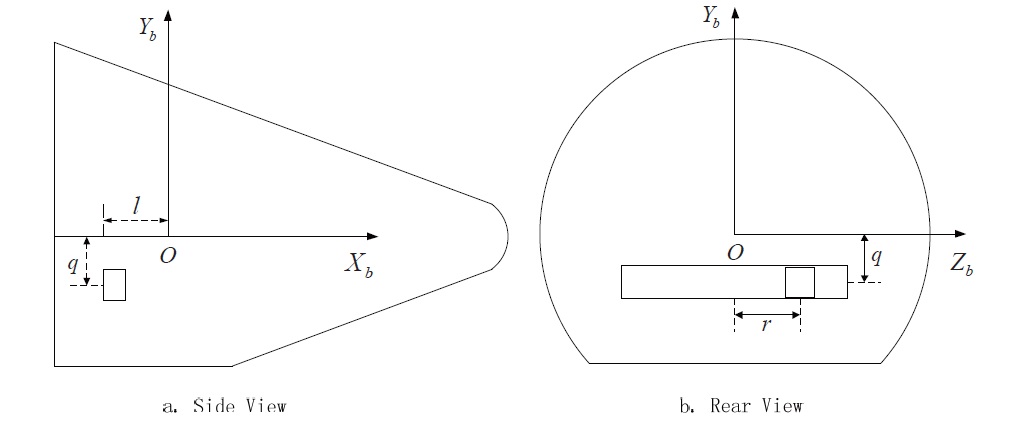
The realization of the MaRV-moving mass two-body system is shown in Fig. 2, and it consists of a cone-shaped body. The moving mass is allowed to translate with respect to the MaRV, but is not allowed to rotate with respect to the MaRV.
The system translational dynamics are given by Equation (10).

The aerodynamic force model is given by Equation (11).
The kinematic equations of attitude when the system is rolling against the centroid of the shell are given by Equation (12).

The system rotational dynamics are given by Equation (13).

where
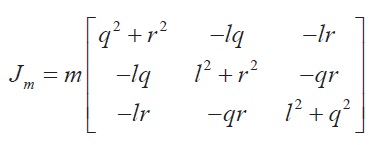
and the reduced-mass parameter is given by
μ=mM/(M+m)
The aerodynamic moment model is given by Equation (14).
where

Equation (10) and Equation (13) describe the mathematical model of the MaRV-moving mass two-body system. See Ref [4] and [5] for the detailed derivation for the governing equations of motion.
The roll channel dynamic equation is derived according to Ref [4].
Let

Where

From Equation (12) we can get

Derivate both sides of Equation (16) and substitute it into Equation (15). Then Equation (15) can be rewritten as

With further consolidation, Equation (17) is rewritten as

where
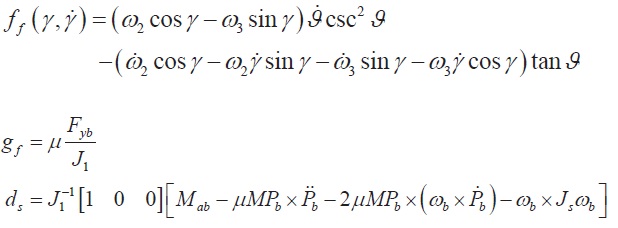
Analysis shows that the system rotational dynamic equation is non-linear, coupled and time-varying. There are also numbers of disturbling moments during the re-entry. However, the sidely used classical PD comtrol theory cannot meet the needs of MMRCS. This paper presents the attitude controller for for the roll channel using TLC.
The controller is based on the roll channel dynamic equation (18) and the desired equation ignoring the disturbance term is rewritten as

According to the design philosophy of TLC, it is essential to get the nominal control instruction of the system. The nominal control instruction of the system is the control instruction of the vehicle’s roll angle and roll angular velocity, namely

The nominal position of the moving-mass is

At the same time, to ensure causality causality,
are obtained by the following pseudo differentiator

where
Define the state error of system as

According to the design philosophy of TLC, the linearized matrix of tracking error dynamics

is
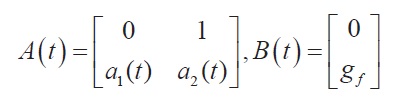
where

a2(t)=(ω2sinγ+ω3cosγ)tan?
If the desired closed-loop dynamic behavior is
Then according to

The expression of
where
k11(t)=0
k12(t)=0
k21(t)=(-λ1-a1(t))/gf
k22(t)=(-λ2-a2(t))/gf
The control input of the system is

According to the pre-established PD-spectrum theory, the time-varying parameters are
λ1=ω2(t)
A numerical simulation of the full, nonlinear 6-DOF equations of motion is used to examine the time response of the TLC for the given roll command.
The initial conditions for the simulation are: initial speed
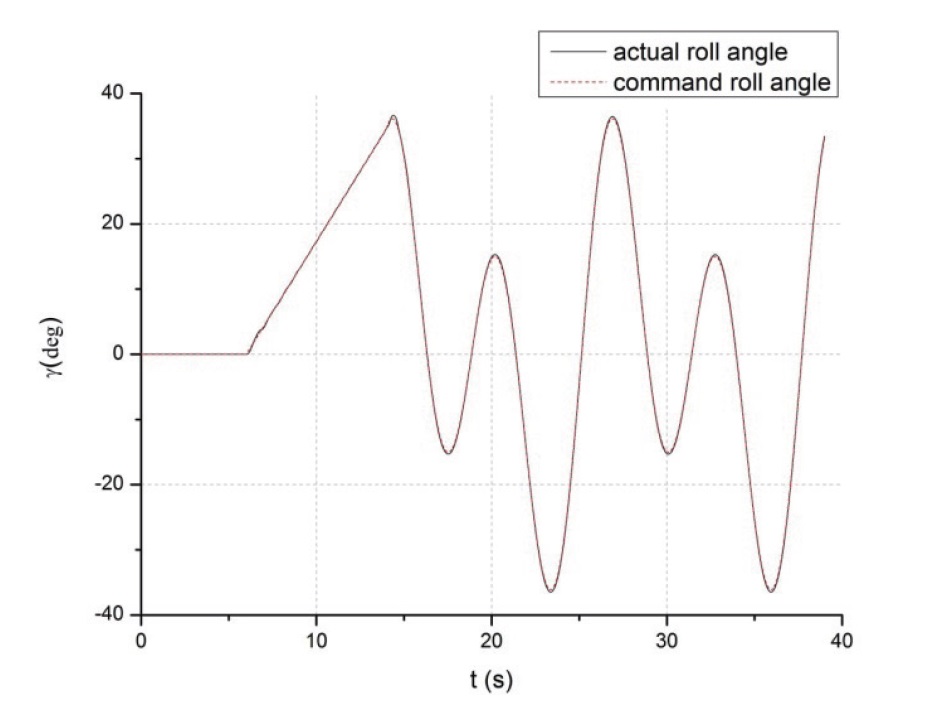
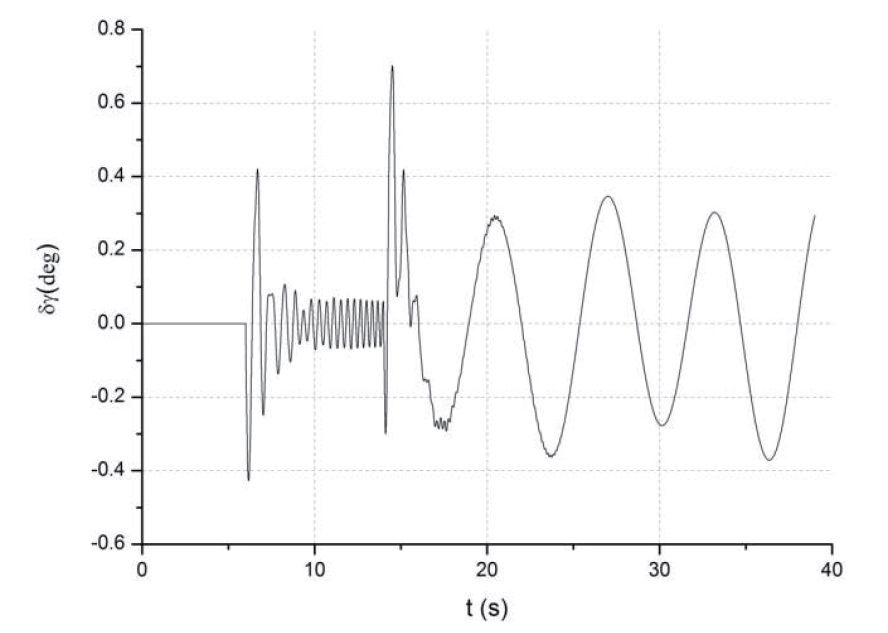
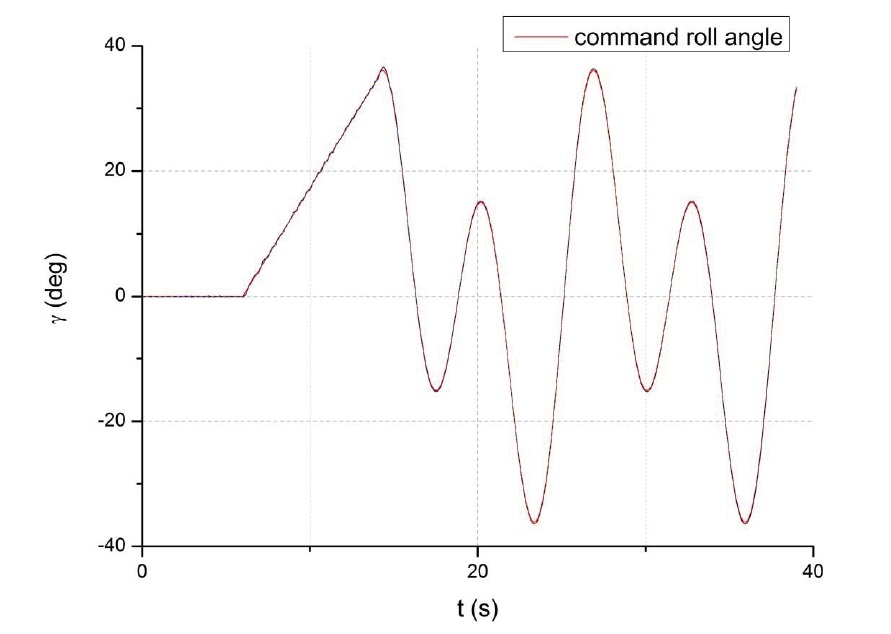
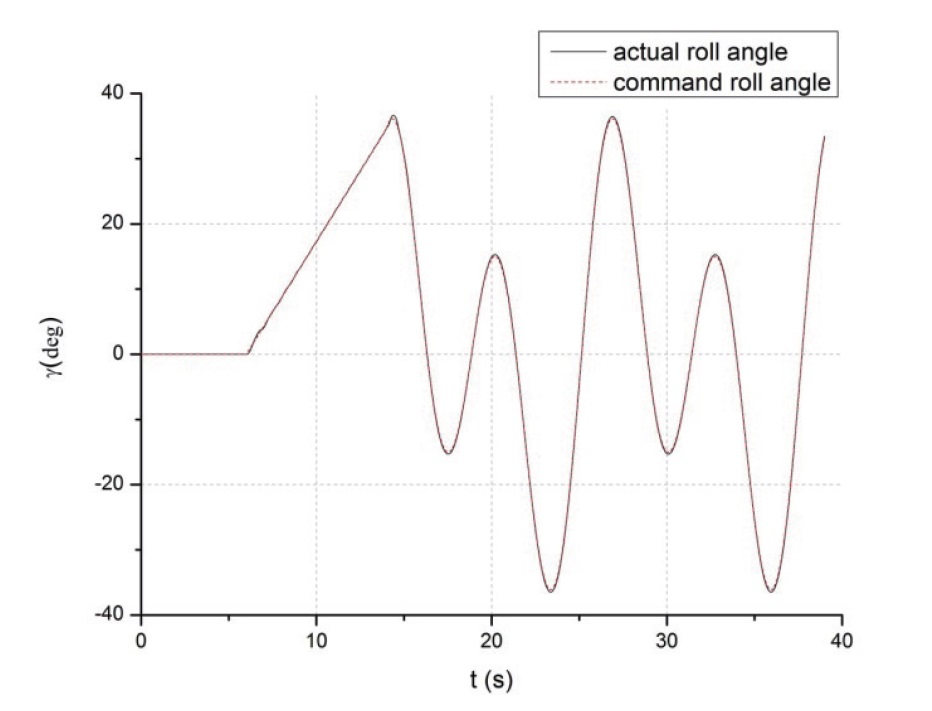
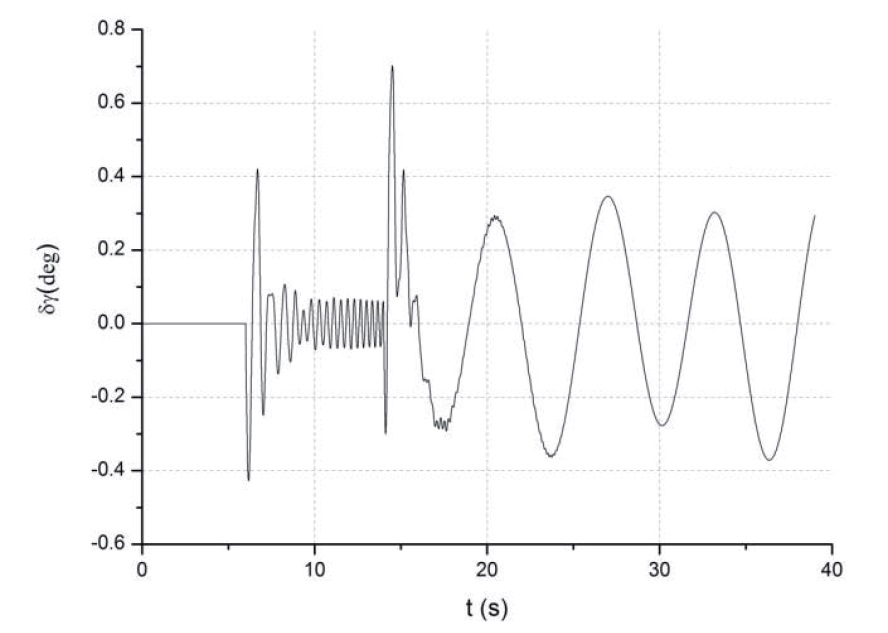
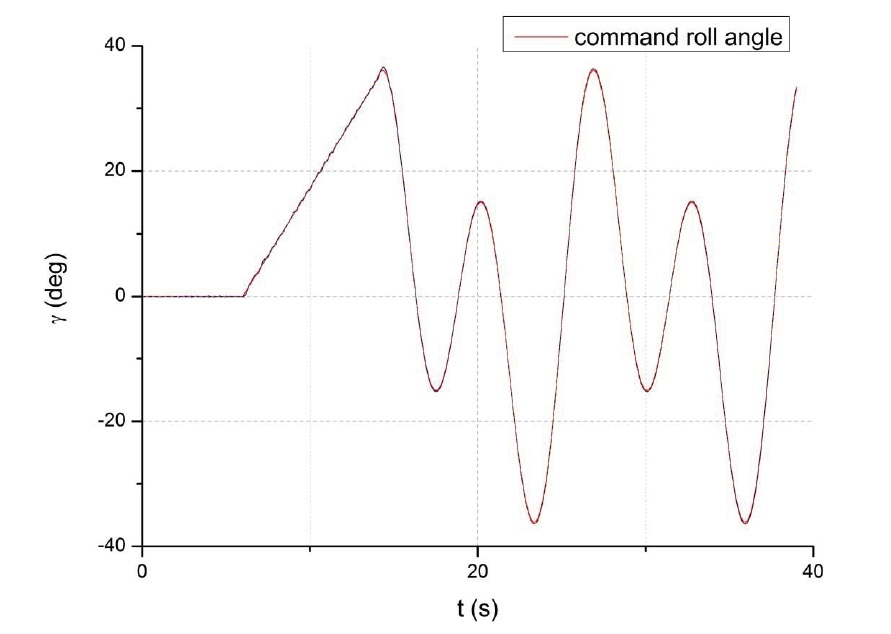
The time histories of the roll angle and tracking error are shown Fig. 3 and Fig. 4. As can be seen from the plot. the roll response is very quick with little overshoot. The maximum peak overshoot is about 0.7 degree, or 1.75% of the 40-degree commanded roll angle. Also, the tracking error is exponentially stabilized as time goes on.
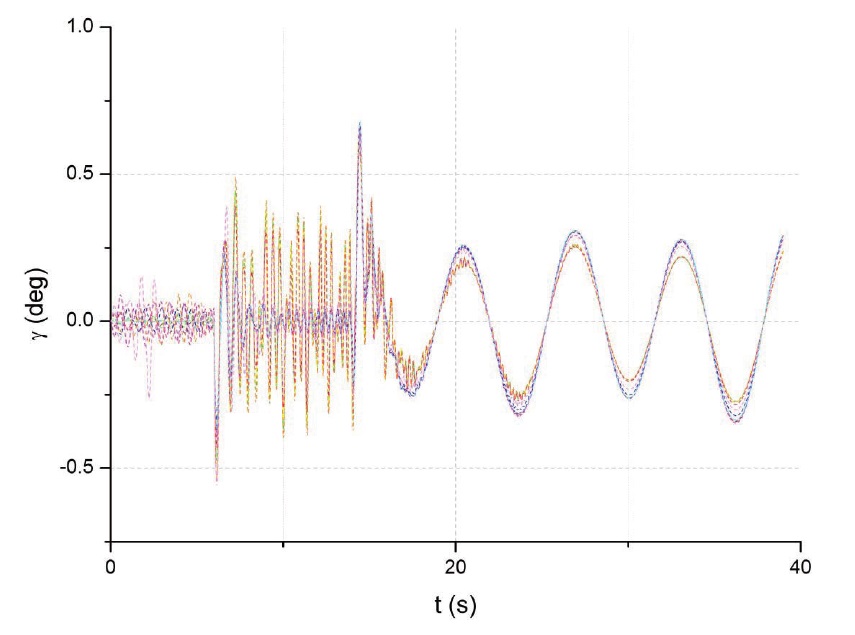
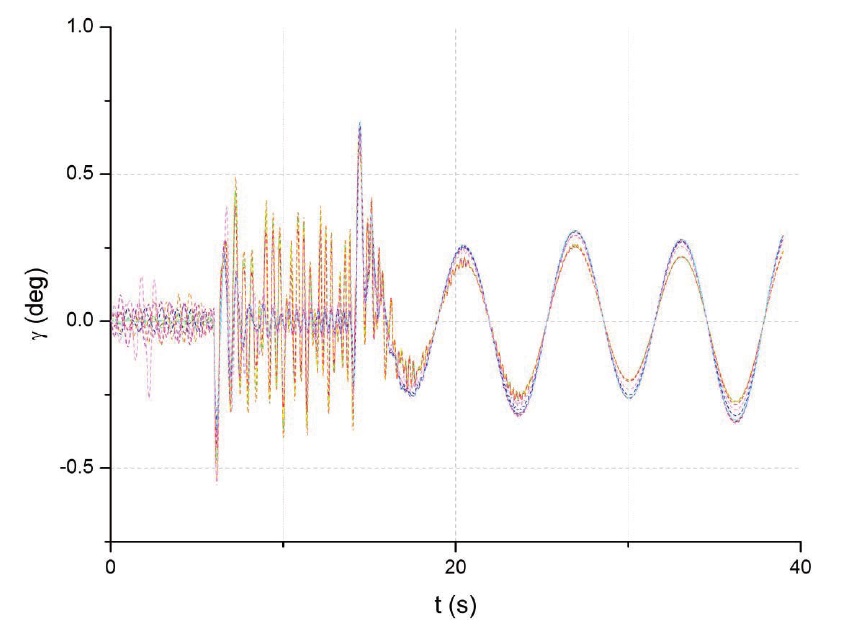
The envelope values of wind speed with a 99% probability are shown in Table 1 according to Ref[16]. Simulations are performed at the same given roll command. Fig. 5 and Fig. 6 show the responses and tracking errors of roll angle with wind disturbances.
The controller is stable when there are wind disturbances.
[Table 1.] Envelope values of wind speed with a 99% probability

Envelope values of wind speed with a 99% probability
The maximum peak overshoot of all curves is about 0.7 degree, or 1.75% of the 40-degree commanded roll angle. Also, the tracking errors all follow the same trend when exponentially stabilized.
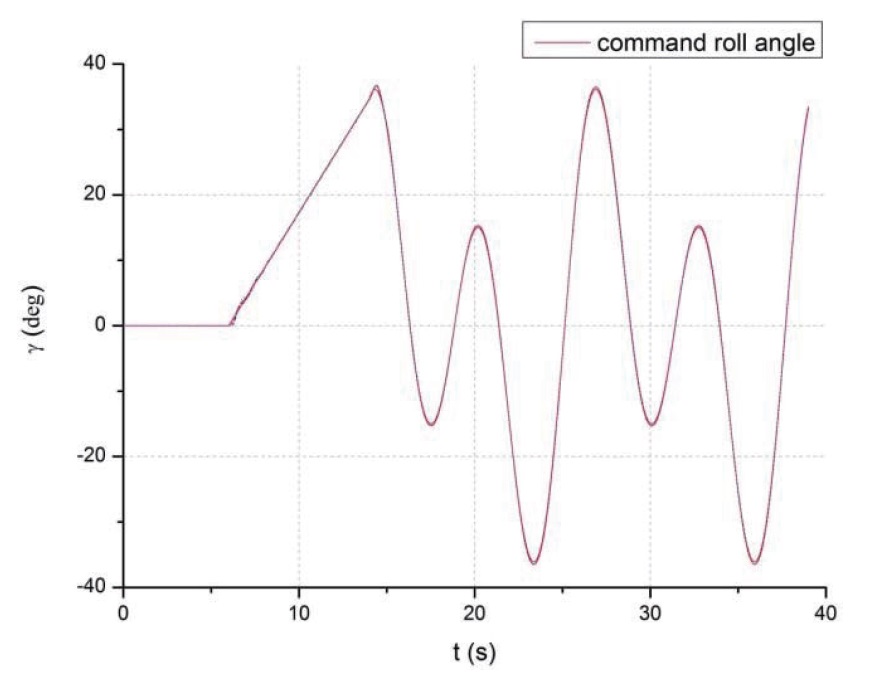
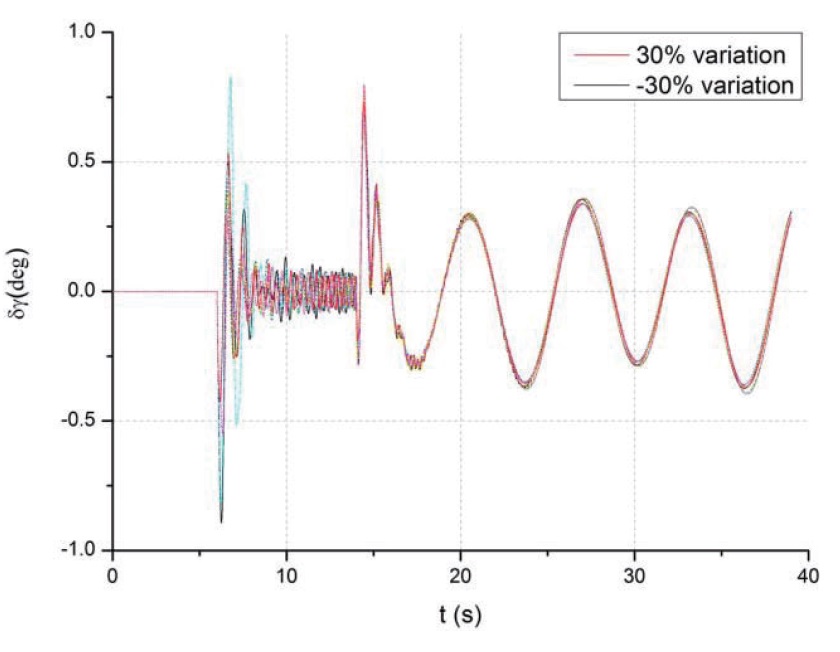
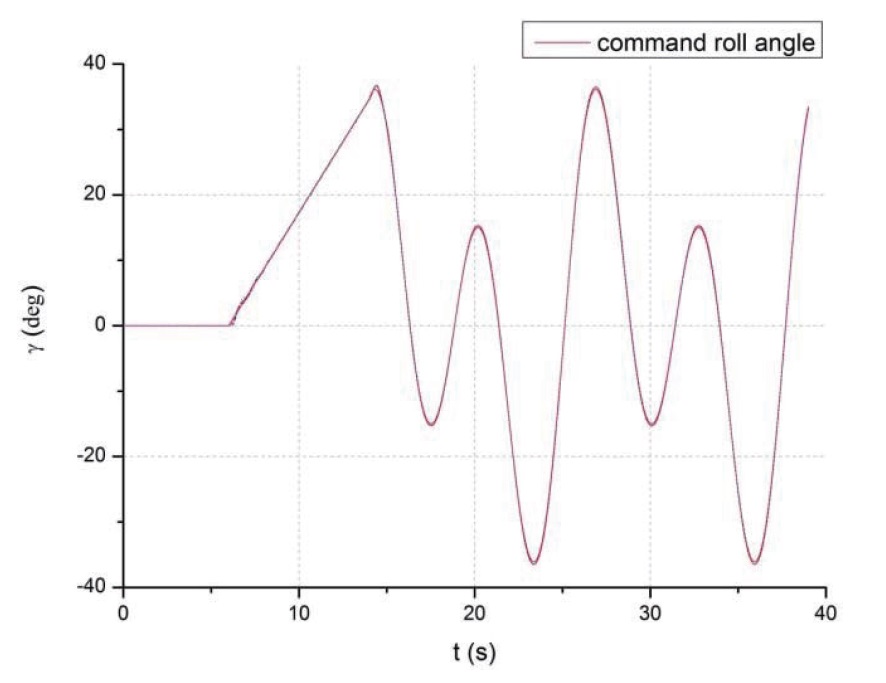
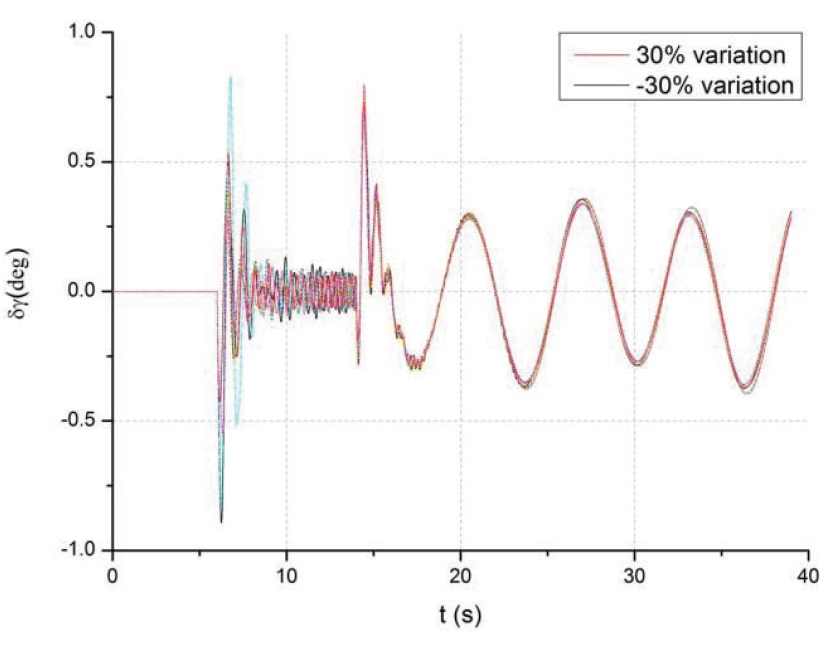
Considering ±30% variations in aerodynamic coefficients and ±10% variations in atmospheric density, the simulations are performed at the same given roll command. Fig. 7 and Fig. 8 show the responses and tracking errors of roll angle in various aerodynamic coefficients.
Obviously, the controller is still stable when there are variations in aerodynamic coefficients. The maximum peak overshoot of all curves is about 0.9 degree, or 2.25% of the 40-degree commanded roll angle. Also, the tracking errors
all follow the same trend when exponentially stabilized.
This paper presented a nonlinear, time-varying controller design for an MaRV using the trajectory linearization method. The nonlinearity, coupling and time-varying characteristics of the MaRV pose great challenges to the controller and TLC provides a satisfactory solution for the MMRCS. The controller structure exhibits considerable inherent robustness and decoupling capability without high actuator activity, providing a useful framework to deal with MaRV problems. Simulation shows that the controller is capable of dealing with different instructions. Although the controller is designed only for nominal aerodynamic coefficients, excellent performance is verified for wind disturbances and ±30% variations of the aerodynamic coefficients. It is this “plug-and-play” feature that is highly preferential for developing, testing and routine operating of the re-entry vehicles.
Future research plans include improving controller performance by: (i) using a nonlinear observer to take advantage of the ignored disturbance term