Since the launch created the risk of collision between the debris and the operational satellites. According to NASA Orbital Debris Quarterly News, these two breakups created approximately 5000 objects larger than 10 cm in diameter and increased the debris cataloged by 50%[1,2,3].
The Korea Aerospace Research Institute (KARI) operates KOMPSAT 2 and KOMPSAT 3 as low Earth orbit (LEO) satellites and COMS in geostationary Earth orbit (GEO). KARI also has plans to launch KOMPSAT 5 and KOMPSAT 3A in LEO and GEOKOMPSAT 2A and GEOKOMPSAT 2B in GEO in the future. Collision risks have been increasing not only in LEO but also in GEO. For example, KOMPSAT 2 received 16 Conjunction Summery Messages (CSM) from JSpOC in 2011, but because of the non-acquisition of precise tracking data for the approaching objects and the lack of a collision avoidance maneuver planning system, no action was taken. However, the COMS (Chollian) completed a maneuver to avoid collision and maintain a safe distance from the approaching Russian satellite RADUGA 1-7 when the latter operated abnormally in February 2011, although this maneuver was done without considering collision probability, position uncertainty, and precise tracking data for RADUGA 1-7.
As the amount of space debris increases, collision avoidance maneuvers are required for operational satellites. The lower the probability threshold, the more maneuvers shall be performed. However, no matter how many maneuvers are performed, risk can never be completely eliminated. Therefore, we can acquire avoidance maneuvers by considering the multi-objective function to decrease collision probability and decrease maneuver magnitude.
Several studies have been undertaken in Korea. For example, an optimal collision avoidance maneuver was investigated that considered multi-threatening objects within short periods while satisfying fuel constraints which provided an acceptable collision probability for LEO satellites[4,5,6]. Analysis has also been performed on the collision probability of the COMS-1 satellite according to position uncertainty, and analysis has been performed on the collision avoidance maneuver frequency for KOMPSAT-2 and KOMPSAT-5[7,8]. Meanwhile, owing to the growing risk of space collision, analysis tools to mitigate the risk of space conjunction for our satellites have been developed by KARI. The conceptual design of space debris collision risk management software has been presented[9].
The solution method for the collision avoidance maneuver can be done with various optimization algorithms. It has been performed using derivative-based methods. The disadvantage of the above optimization techniques is that they are based on an initial guess and may be trapped in the local minimum. Recently, the research community has diverted their attention towards soft computing techniques, such as evolutionary algorithms and genetic algorithms. Genetic algorithms are search algorithms based on the mechanism of natural selection and natural genetics. GA modeling is gaining importance because of its robust random search capability and near global optimal values. For example, in a recent study by M. Duncan and J. Wysackin regards to finding an optimal avoidance maneuver that mitigates the risk of collision events, a derivative-free optimization (DFO) technique was utilized[10]. DFO is an unconstrained multi-variable optimization technique. It iteratively forms a quadratic model that produces a local approximation of the cost function. The constraints are simply added to the cost function to apply an additional cost or “penalty” as required. However, a genetic algorithm is a constrained multi-variable optimization technique. Genetic algorithms are used to acquire both the maneuver start time and the delta-V to decrease the collision probability from an approaching uncontrolled object with consideration of orbit determination accuracy or position uncertainty. Characteristics of genetic algorithms include stochastic iteration, parallel processing, basis on population, absence of gradients, integer constraints, and an automatic or usersupplied start population[11].
The rest of this paper is organized as follows. Section 2 details stationkeeping for GEO satellites and ground track maintenance for LEO satellites, the use of genetic algorithms, and planning for collision avoidance maneuvers. Section 3 presents the results of a numerical simulation based on the maneuver strategy employed. Finally, conclusions are described.
2. Avoidance Maneuvers Planning for LEO/ GEO Satellites
2.1 GEOStationkeeping and LEO Ground Track Maintenance
The ground track of a LEO satellite will drift by longitude at our desired crossing point over time owing to external perturbation. Due to the gravitational force, solar wind, and atmospheric drag, deviation from the reference orbit leads to ground track drift. Ground track error is the amount of drift of the current orbit from the reference orbit crossing the equator westward or eastward. Therefore, a ground track maintenance maneuver should be undertaken to maintain the ground track within a predefined control band around the reference ground track. For example, in-plane maneuvers are used for altitude adjustment to compensate for the effect of air-drag. However, this decrease in altitude affects ground track repeatability or ground track error.
The design objective was to choose the semi-major axis so that the desired

ratio for a repeating ground track is achieved. Rather than solving for one value of the semimajor axis, a range of possible values is considered around the nominal semi-major axis[12]. The mean semi-major axis, mean eccentricity, mean orbital inclination and mean argument of perigee which satisfies the user's repeating ground track criteria can be solved by Equations (1) -(4).

Here, ωs denotes the mean orbital rate of the satellite, and
indicates the rotation rate of Earth with respect to the orbital plane;
are expressed as



where a, e, i, n, Re, μ, and J2 are the semi-major axis, eccentricity, inclination, mean orbital rate, Earth’s radius, gravitational constant, and the perturbation from Earth’s gravity, respectively;

denote the mean rotation rate of Earth, the time derivative of the argument of perigee, the time derivative of the mean anomaly, and the time derivative of right ascension of an ascending node, respectively.
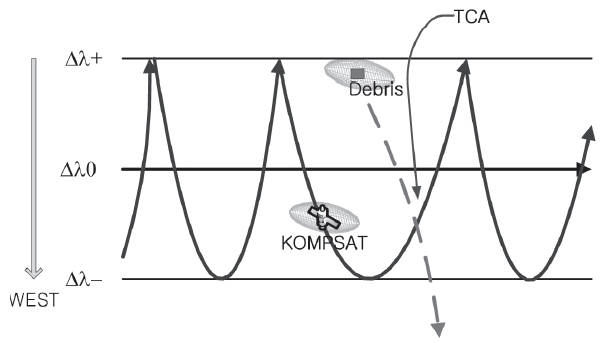
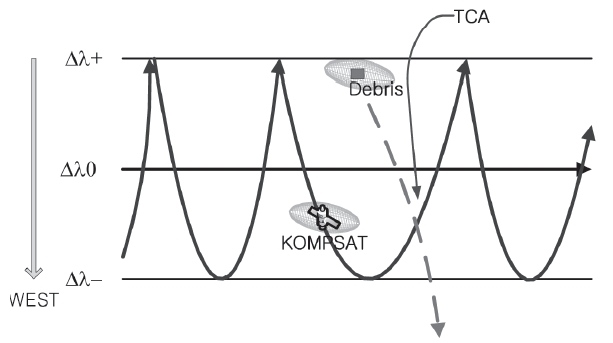
The repeating ground track error is the difference between the current longitude and the nearest longitude grid point computed as a point of an orbit with a specified repeat count and reference longitude. The repeat count gives the number of orbits before the ground track repeats over the same longitude. Therefore, the amount of delta-V required is considered to maintain the repeating ground track when a satellite needs to avoid other objects while remaining within the ground track boundary as shown in Fig. 1. Moreover, a sun-synchronous LEO satellite should be maintained within the designated ground track boundary.
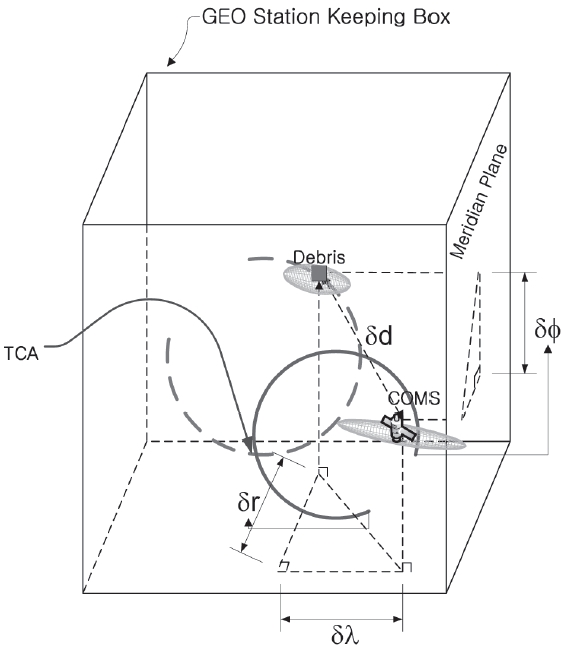
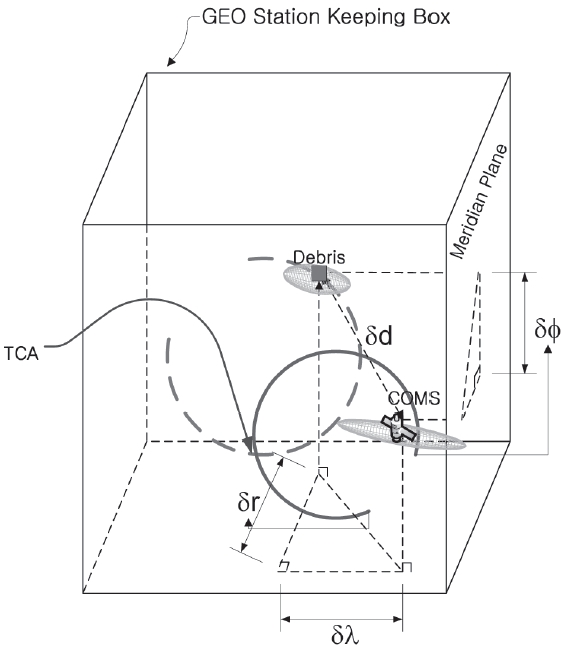
In the case of a GEO satellite, the maneuver is performed as a consequence of thruster burns orthogonal to the orbital plane that must be executed to compensate for the effect of the lunar/solar gravitation that perturbs the orbit pole by typically 0.85° per year. This part of GEO stationkeeping is called North?South stationkeeping. On the other hand, East? West stationkeeping is the management of the orbital period and eccentricity vector, and is performed by making thruster burning tangential to the orbit. Calculation of delta-V should also be considered, in order to simultaneously keep the orbital period synchronous with Earth’s rotation and maintain the desired eccentricity. The eccentricity (i.e., the eccentricity vector) is perturbed by solar radiation pressure. A GEO satellite is stationed at 128.2 °E within a ±0.05° stationkeeping box as shown in Fig. 2. However, because of the nonspherical nature of the geopotential field, the GEO satellite is attracted to a stable point that is located at approximately 75.2 °E. Therefore, East?West stationkeeping should be taken into account to control eccentricity due to solar radiation pressure and longitudinal drift as a result of the nonspherical nature of the geopotential field. The linearized equations can be obtained in terms of the eccentricity vector, inclination vector, and longitude variation with each velocity component. The required velocity increment fluctuates between 40 and 51 m/s per year for inclination stationkeeping and up to 2 m/s per year for longitude stationkeeping[13,14,15]. The maneuver time and delta-V can be acquired to keep their position maintained in stationkeeping box by solving the system of nonlinear equations defined by Equations (5) -(7).



Here, ΔVR, ΔVT, and ΔVN are the velocity increment in radial, tangential, and normal directions in orbit, respectively; α, Vsyn, and Δλ, are are the right ascension, the nominal velocity in GEO, and the longitude difference, respectively; Δex, Δey, Δix, and Δiy and are the eccentricity and inclination vectors in the Earth Centered Inertial (ECI) coordinate system Δex, Δey, Δix, Δiy and Δλ can be calculated with linearization.
Genetic algorithms are a global search method for solving optimization problems and were introduced in 1975 by John Holland. Genetic algorithms work for continuous, discrete, and combinatorial problems. Also, they are less susceptible to convergence at a local minimum or maximum than gradient search methods. However, they have a disadvantage in terms of their large computation time. Nevertheless, genetic algorithms offer the benefit of finding a global solution in a constrained nonlinear system. A genetic algorithm creates a population of solutions and applies genetic operators such as mutation and crossover to evolve solutions in order to find the best one. The three most important aspects of using genetic algorithms are the definition of an objective function, definition and implementation of a genetic representation, and definition and implementation of genetic operators. Genetic algorithms are iterative schemes where the population is modified using the best features
of the elements from previous generations in eachof the iterations. They are subjected to five basic operations to produce better results. Creation is the procedure of randomlygenerating a population. Reproduction is the process where each string is copied by considering the values of the adaptive penalty function. Crossover is the process where the combination of two chromosomes generates a new descendant. Mutation is the process where there is an occasional random modification for the value of one element of a chain. Epidemic is the process where a part of the population is exterminated with the consequent entrance of new individuals in the population[16].
Reproduction is assigned to those elements that have the highest value of the quantity chosen to be the measurement of fitness for an individual, and thus has a higher probability of contributing to the next generation, creating at least one descendant. The higher the values of this objective function, the higher are the chances that an individual will survive in the environment and reproduce its genetic material to the next generation. The procedure starts with a random population of up to several individuals. The initial population is generated randomly, taking into account distance, time, angle, acceleration, velocity, etc., according to the constraints of each variable[17].
2.3 Collision Avoidance Maneuver Planning
Usually, sun-synchronous satellites in LEO should be maintained within a ground track boundary for imaging missions, and GEO satellites for imaging and communication missions should be maintained in their own stationkeeping box. Therefore, planning for an avoidance maneuver should take into account the stationkeeping box or ground track boundary to obtain the maneuver start time and delta-V. Once a collision risk event is estimated, various avoidance maneuver plans should be generated. An acceptable avoidance maneuver plan must produce an orbit change that reduces the collision risk while still meeting positioning constraints to retain the stationkeeping box.
If a potential collision risk is greater than the maximum threshold, the possible collision events are listed and the operator is warned of the possible collision objects, time of closest approach, collision probability, range distance, etc. Then, a precise orbit is determined by using all antennas tracking data or the global position systemnavigation solution from our site as well as ephemeris from worldwide collaborating observation sites. An analytic collision prediction processor is used to determine which objects or debris might collide with the satellite by numerically integrating the equations of motion for each object. Then, the position of each object can be compared to that of every other object at each time step over the time span of interest. In this study, a minimum distance or collision probability for collision risk was evaluated. The collision probability was obtained from STK/AdvCAT which adopts the Alfano formula. The next step was to determine the maneuver start time and delta-V generated by a genetic algorithm with a boundary.
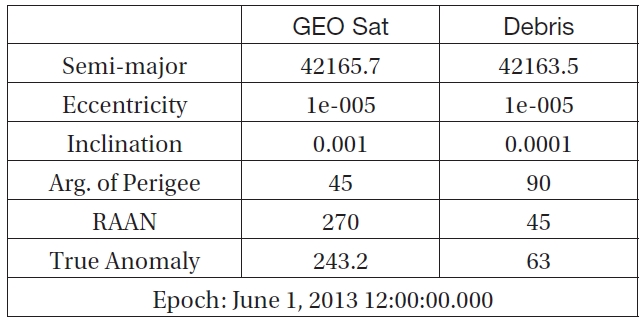
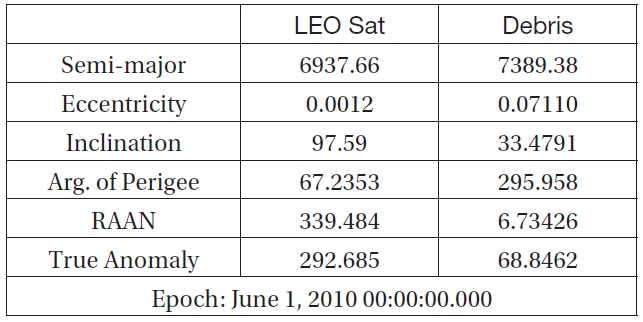
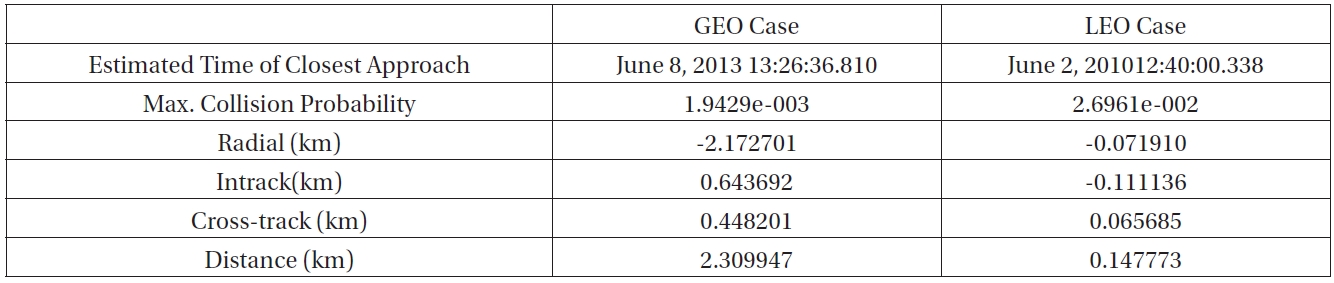
The variables are delta-V and maneuver start time for one impulsive maneuver, where the boundary should be less than ±1 m/s for delta-V. The maneuver starting time before the time of closest approach should be less than 24 h in the case of the GEO satellite and 12 h for the LEO satellite. Table 1 and Table 2 list the initial state and epoch time of the GEO and the LEO satellite and debris for the avoidance maneuver simulation. Table 3 presents collision data at the time of closest approach.
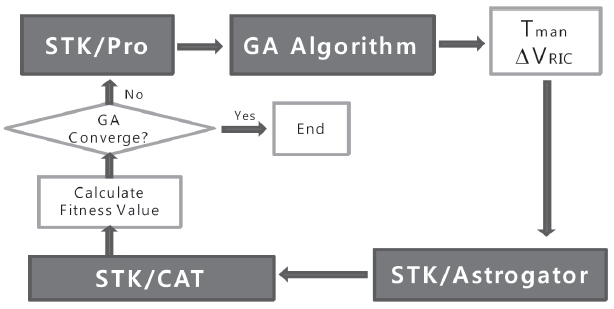
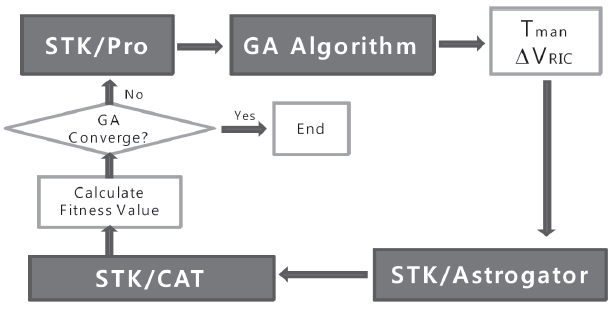
Fig. 3 shows a maneuver planning flowchart. The STK/ Astrogator propagates with delta-V at the maneuver start time generated in the genetic algorithm and is integrated with an accurate perturbation model because the linearized perturbed model is not adequate for obtaining an accurate delta-V and time to ensure object avoidance. STK advCAT reports the range distance or collision probability between
[Table 1.] Initial State of the GEO satellite
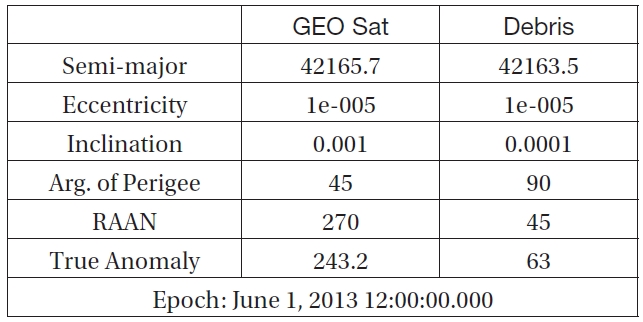
Initial State of the GEO satellite
[Table 2.] Initial State of the LEO satellite
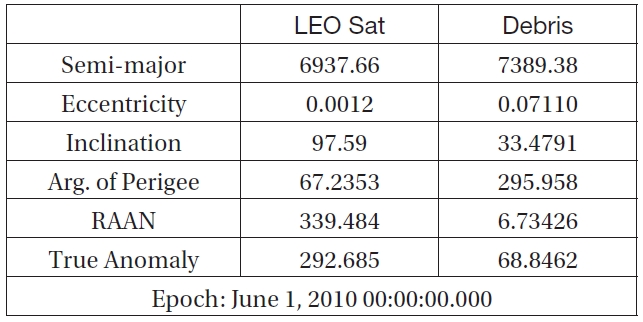
Initial State of the LEO satellite
[Table 3.] Collision Data at Time of Closest Approach
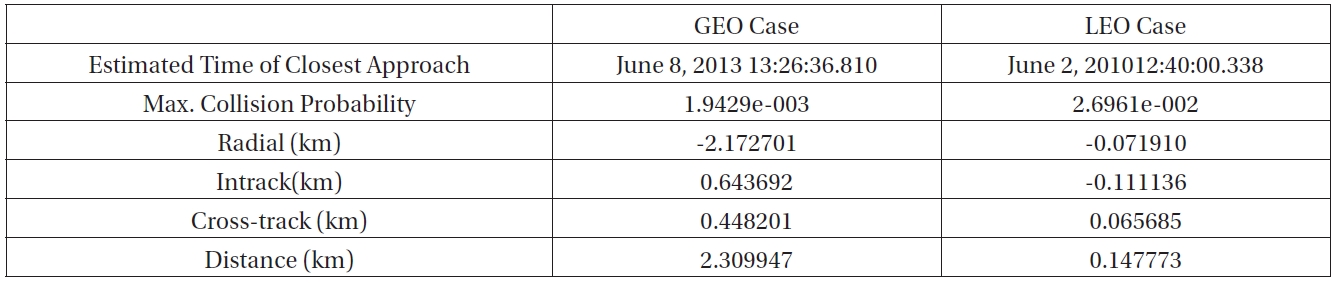
Collision Data at Time of Closest Approach
two conjugated objects or debris.
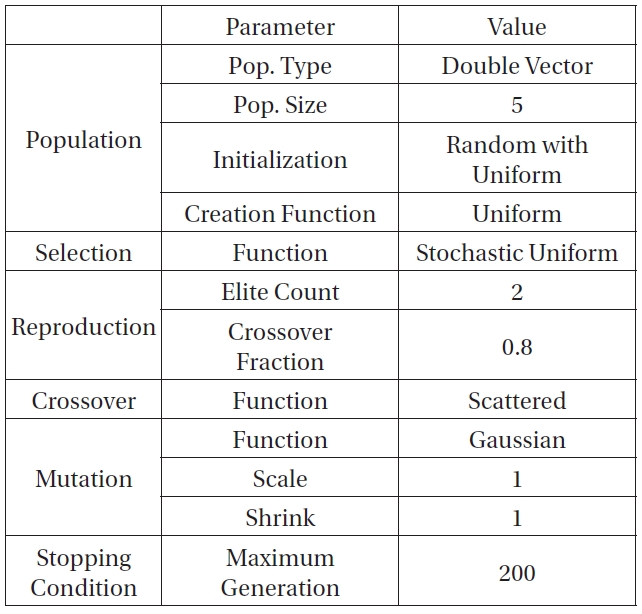
Table 4 lists the parameter values for setting the genetic algorithm. The fitness of each individual is represented by the total impulse velocity required to perform the orbital transfer. The population size is five [18,19]. The fitness function can be written as

Inequality constraints for a LEO satellite are



Inequality constraints for a GEO satellite are




where Δf denotes consumed fuel mass and fnef is allowable fuel mass after the maneuver; ΔL denotes the amount of deviation from a stationkeeping box for the GEO satellite
or the deviation of a ground track boundary for the LEO satellite; Pc is the logarithm value for the deviation of collision probability from the desired collision probability (10-5) between our satellite and objects; C1, C2 and C3 are weighting factors, which are set to 100, 10, and 300 for the GEO satellite case and 100, 500, and 500 for the LEO satellite. However, if consumed fuel mass is less than the allowable fuel mass,
Increasing the population size enables the genetic algorithm to search for more points and thereby obtain a better result. However, the larger the population size, the longer the computation time for each generation. The elite count is the number of individuals with the best fitness values
[Table 4.] Parameter Setup for the Genetic Algorithm
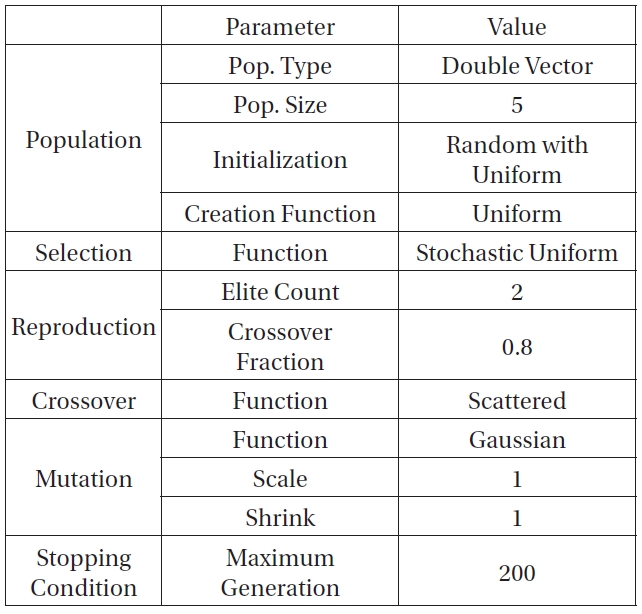
Parameter Setup for the Genetic Algorithm
in the current generation that are guaranteed to survive in the next generation. These individuals are called elite children. The elite count is set to two. The crossover fraction is the fraction of individuals in the next generation, other than elite children, that are created by crossover. The rest are generated by mutation. The crossover fraction is set to 0.8. Individuals with the lowest values reproduce too rapidly, taking over the population pool too quickly and preventing the genetic algorithm from searching other areas of the solution space. On the other hand, if the values vary only a little, all individuals have approximately the same chance of reproduction and the search will progress very slowly. The mutation scale parameter determines the variance in the first generation. The mutation shrink parameter controls how the variance shrinks as generations pass. If the shrink parameter is 0, the variance is constant. If the shrink parameter is 1, the variance shrinks linearly to 0 until the last generation is reached.
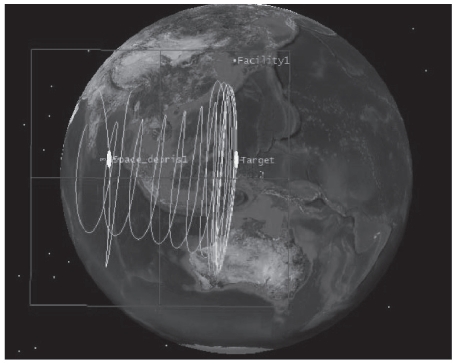
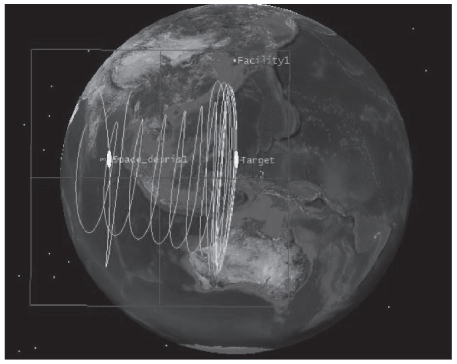
3.2 Simulation Result of Avoidance Maneuver for GEO Satellite
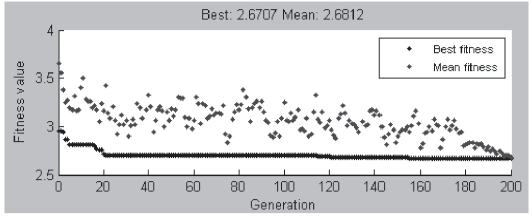
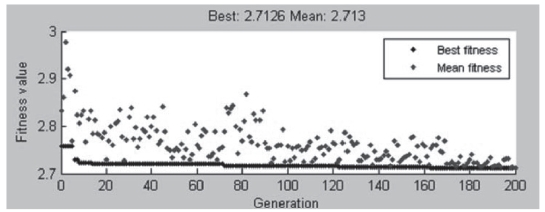
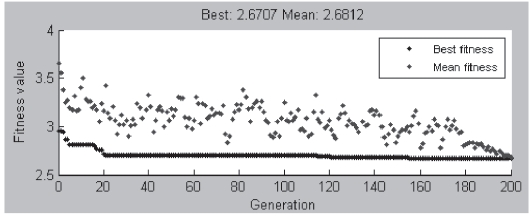
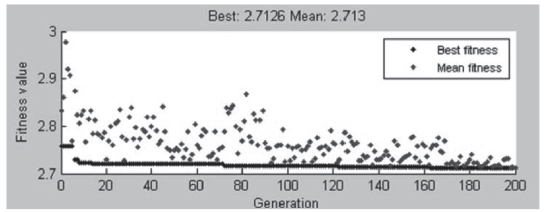
As shown in Fig. 4, space debris approaches from the West toward the GEO satellite operating normally in its stationkeeping box. If the satellite announces a possible collision by conjunction analysis software, the genetic algorithm attempts to find an optimal solution with constraints. The Genetic Algorithm Tool displays a plot of the best and mean values of the fitness function in each generation. When the algorithm stops, the plot appears as shown in Figs. 5 and 6. Points at the bottom of the plot denote the best fitness values, while points above them denote the averages of the fitness values in each generation. The plot also displays the best and mean values in the current generation at the top. Figs. 5 and 6 respectively display simulation results for East.West and North.South thrust used for the avoidance maneuver. Fig. 5 is converged with the best fit value of 2.6707 and the mean fit value of 2.6812. Fig. 6 is converged with the best fit value of 2.7126 and the mean fit value of 2.713. Before the avoidance maneuver, the predicted range distance reached approximately 2.3 km and the collision probability was 1.94e-3. It performed an orbital maneuver to steer its target satellite to prohibit any possible collision and interference from an uncontrolled object. After an avoidance maneuver was executed, the range distance increased to 4.72 km and subsequently drove the collision probability to 2.37e-5 by using the NS thruster on June 7, 2013, 21:08:12 UTC before 15 h 43 min from the time of closest approach and a 6.58 km range distance. In the case
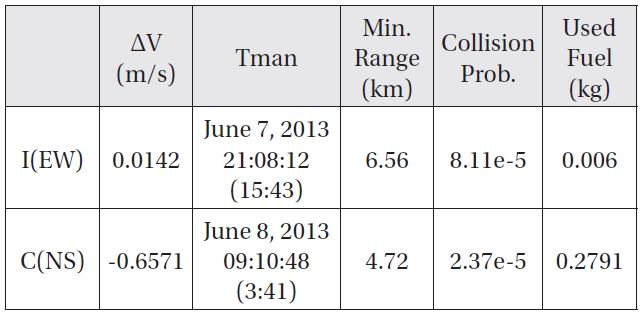
[Table 5.] Avoidance Maneuver Case Study with Genetic Algorithm (GEO Satellite)
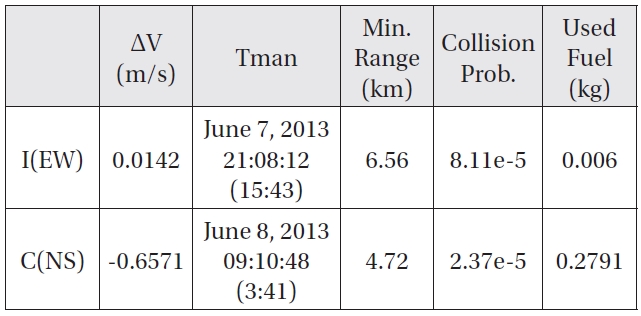
Avoidance Maneuver Case Study with Genetic Algorithm (GEO Satellite)
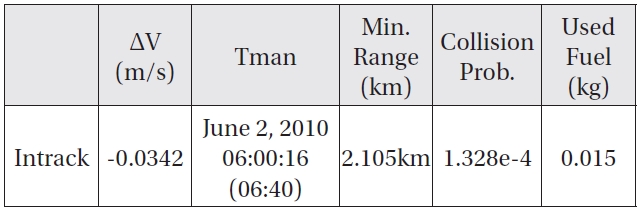
[Table 6.] Avoidance Maneuver with Genetic Algorithm (Intrack Maneuver)
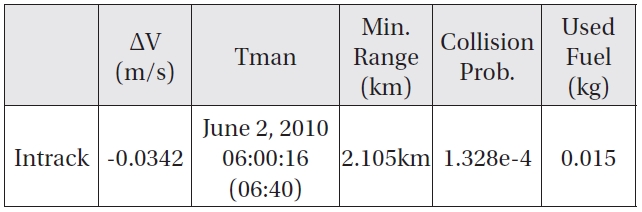
Avoidance Maneuver with Genetic Algorithm (Intrack Maneuver)
of East?West maneuver, the result was 8.11e-5 of collision probability on June 8, 2013, 09:10:48 before 3 h 41 min from the time of closest approach.
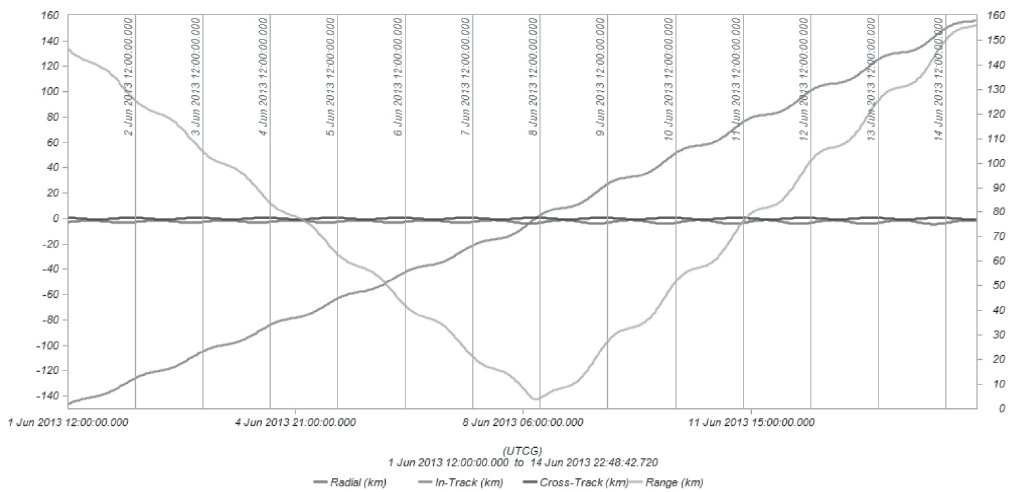
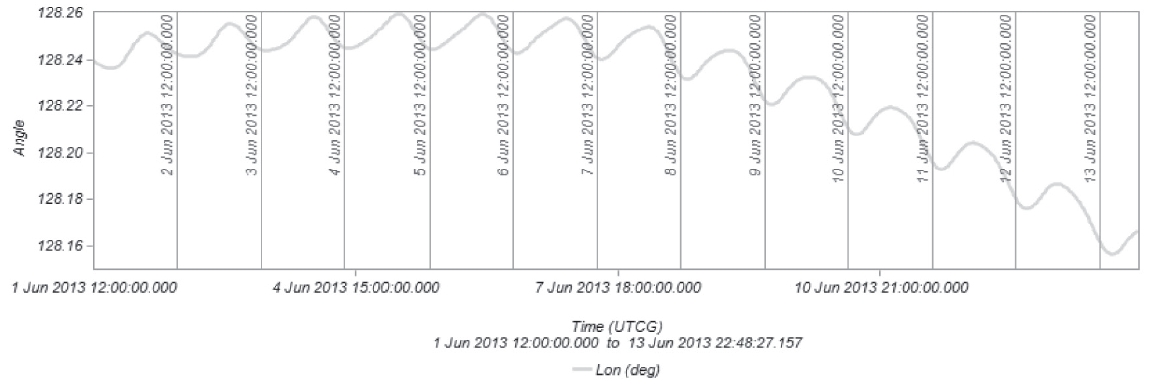
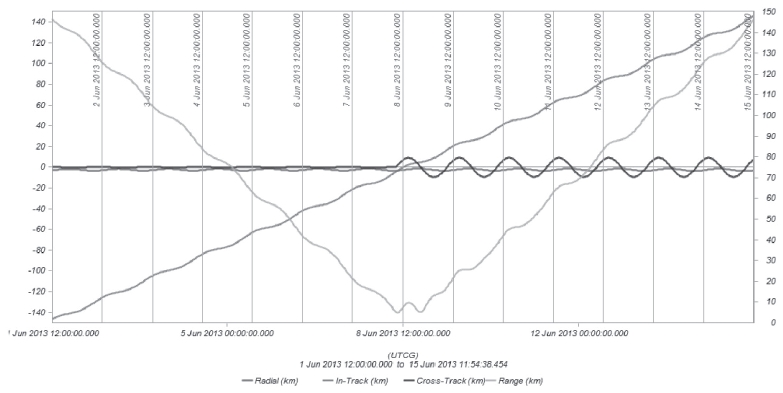
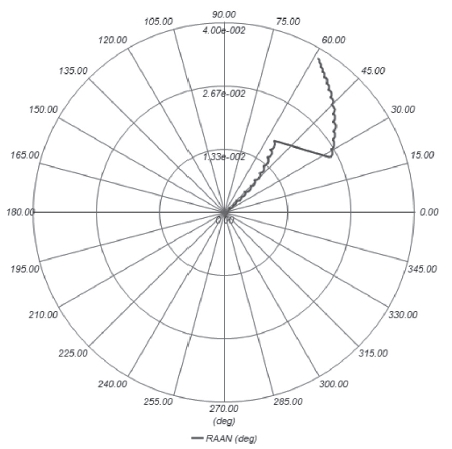
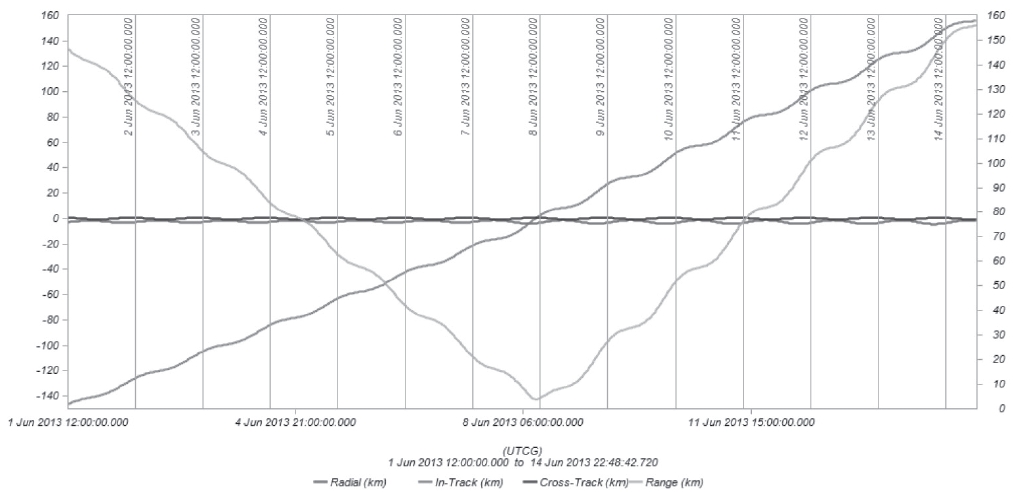
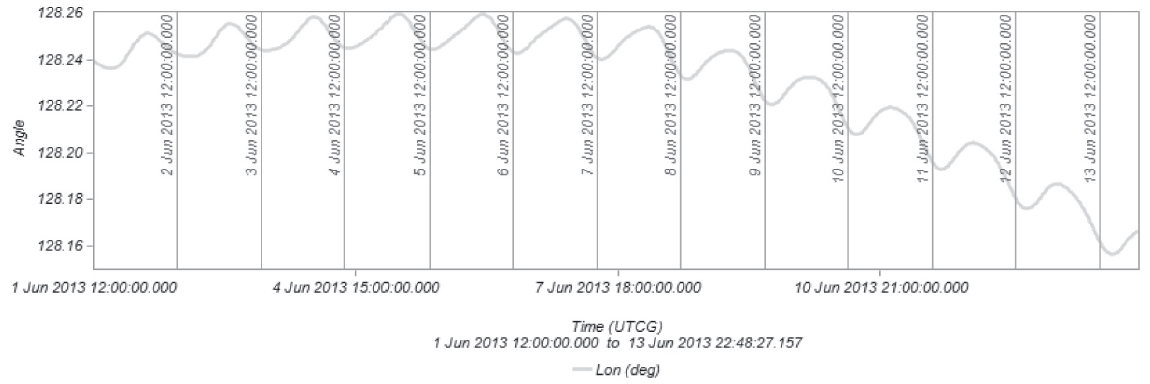
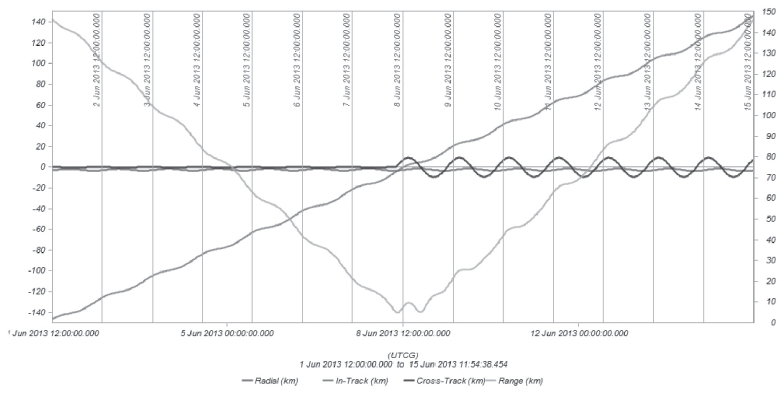
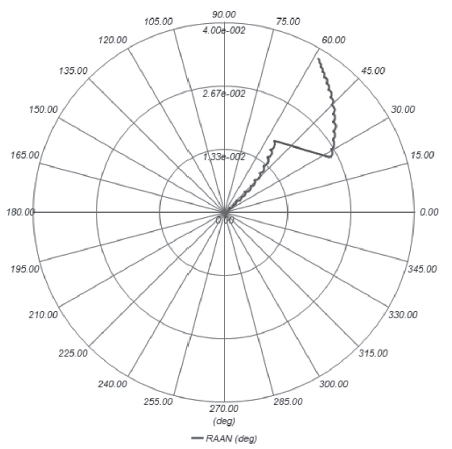
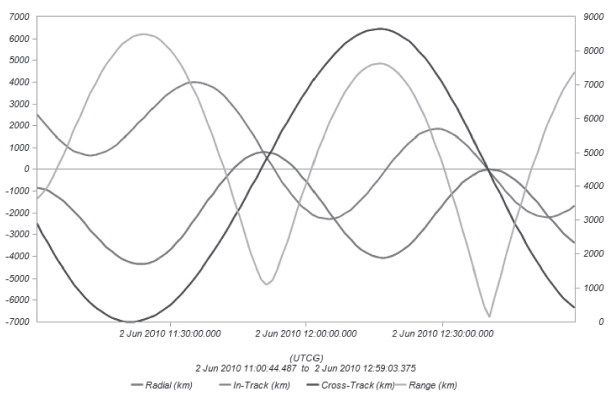
Figs. 7 and 8 illustrate plots of a simulation result after the collision maneuver using the East?West maneuver for the GEO satellite. Fig. 8 shows the radial, intrack, cross-track, and range distances after the collision maneuver. The left side of the Y axis radial, intrack, and cross-track distances between two objects, and the right side of the Y axis shows the range or miss distance between two objects. Fig. 8 presents longitude change after the collision maneuver. It shows that the longitude is kept at 128.2 °E within the ±0.05° E/W stationkeeping box. Figs. 9 and 10 show the results of the collision maneuver using the North?South maneuver for the GEO satellite. Fig. 9 shows the radial, intrack, cross-track, and range distances after the collision maneuver. The left side of
the Y axis shows the radial, intrack, and cross-track distances between two objects and the right side of the Y axis shows the miss distance between two objects. Fig. 10 shows the change in the inclination vector after the collision maneuver. It reveals that satellite longitude is retained within the ±0.05° N/S stationkeeping box.After an avoidance maneuver, the range distance increased to 6.56 km for the EW maneuver and 4.72 km for the NS maneuver and subsequently drove the collision probability to 8.11e-5for the EW maneuver and 2.37e-5for the NS maneuver as shown in Table 5.
3.3 Simulation Result of Avoidance Maneuver for LEO satellite

perturbation model includes the point mass effect as well as the dominant effect of asymmetry in the gravitational field. Therefore, this

model is not sufficient, as shown in equations (1)?(4), to represent real perturbation, and a highprecision orbit propagator (HPOP) model is used in the STK to propagate and evaluate the ground track maintenance. The HPOP uses numerical integration of the differential equations of motion to generate an ephemeris. Several force
modeling effects can be included in the analysis, including a full gravitational field model (based on spherical harmonics), third-body gravity, atmospheric drag, and solar radiation pressure.In this study, the reference longitude is assumed to be 90.22 °E for equator crossing points based on the camera’s field of view, and the revisiting time from the initial ground track is set to 421 repeat counts.
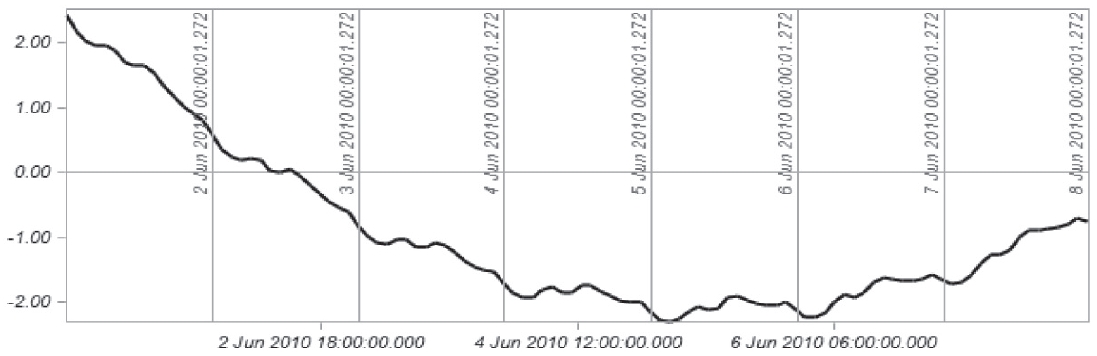
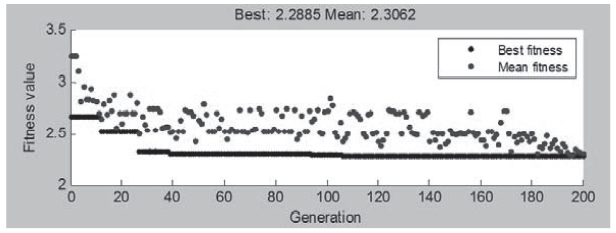
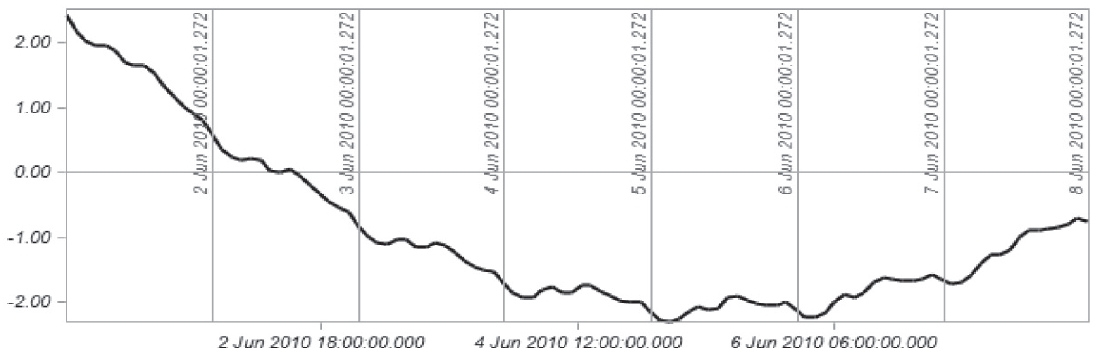
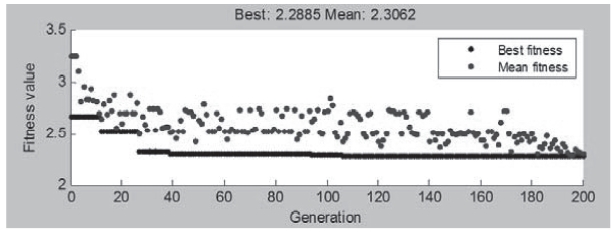
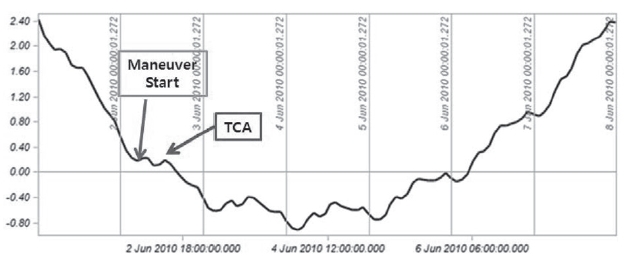
Fig. 11 shows ground track error before the collision maneuver. It indicates that the satellite’s ground track is retained within the ±2 km ground track boundary. If the satellite announces a possible collision by conjunction analysis software, the genetic algorithm attempts to find an optimal solution with constraints. Figs. 12-14 are plots of the simulation result after the collision maneuver using the intrack maneuver for the LEO satellite. Fig. 12 shows the best and mean values of the fitness function at the end of a generation. The plot is generated when the algorithm finds a solution, with the points at the bottom of the plot indicating the best fitness values and points above them indicating the averages of the fitness values in each generation. The plot also displays the best and mean values in the current generation at the top. This figure shows that after 200 generations, a best fit of 2.2479 and mean fit of 2.248 are obtained.
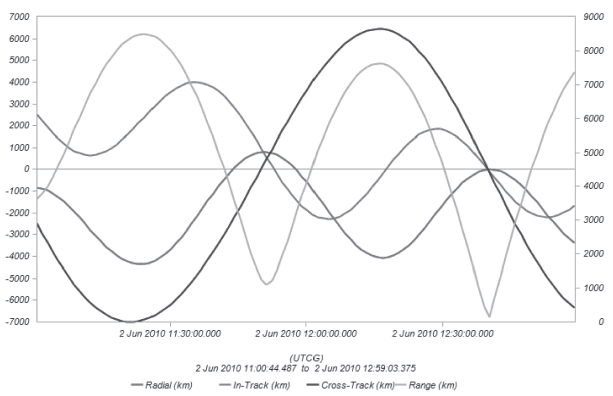
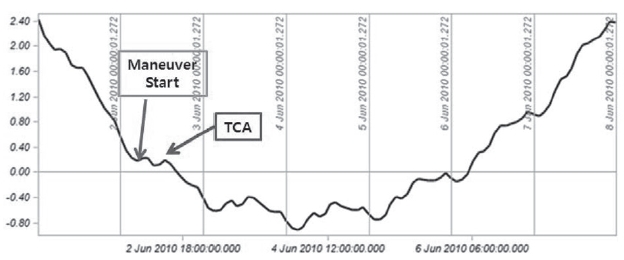
On June 2, the predicted range distance reached approximately 0.128 km and the collision probability was 0.0358. After an avoidance maneuver, the range distance increased to 2.105 km and subsequently drove the collision probability to 1.328e-4by using the intrack direction thruster at 06:40 from the time of closest approach, as shown in Table 6. Fig. 13 provides the radial, intrack, cross-track, and range distances after the collision maneuver. The left side of the Y axis shows the radial, intrack, and cross-track distances between two objects and the right side of the Y axis shows the miss distance between two objects. Fig. 14 shows ground track error after the collision maneuver. Furthermore, it shows that the ground track is retained within the ±2 km ground track boundary.
In this study, a genetic algorithm was used to obtain maneuver start time and delta-V so as to reduce the probability of collision between approaching uncontrolled objects or debris and a LEO satellite and GEO satellite maintained in a stationkeeping box, while considering position uncertainty. The GEO satellite was stationed at 128.2 °E within a ±0.05° E/W and N/S stationkeeping box, and the LEO satellite was maintained within ±2.0 km ground track boundary having 312.4 °E for equator crossing and 409 revolutions for repeat counts. An optimal maneuver solution was found to minimize fuel consumption and collision probability while considering position uncertainty. In the case of the GEO satellite, the predicted range distance reached approximately 2.3 km and the collision probability was 1.94e-3. After the avoidance maneuver, the range distance increased to 4.72 km and subsequently drove the collision probability down to 2.37e-5. In the case of the LEO satellite, the predicted range distance reached approximately 0.23 km and the collision probability was 0.01. After the avoidance maneuver, the range distance increased to 2.91 km and subsequently drove the collision probability down to 6.93e-5. The genetic algorithm showed good performance for avoidance maneuvers regarding LEO and GEO satellites. Grid computing technology and a graphics-processing unit will be adopted in the near future to improve computational efficiency. In addition, the structure of the genetic algorithm will be optimized to reduce computation time.