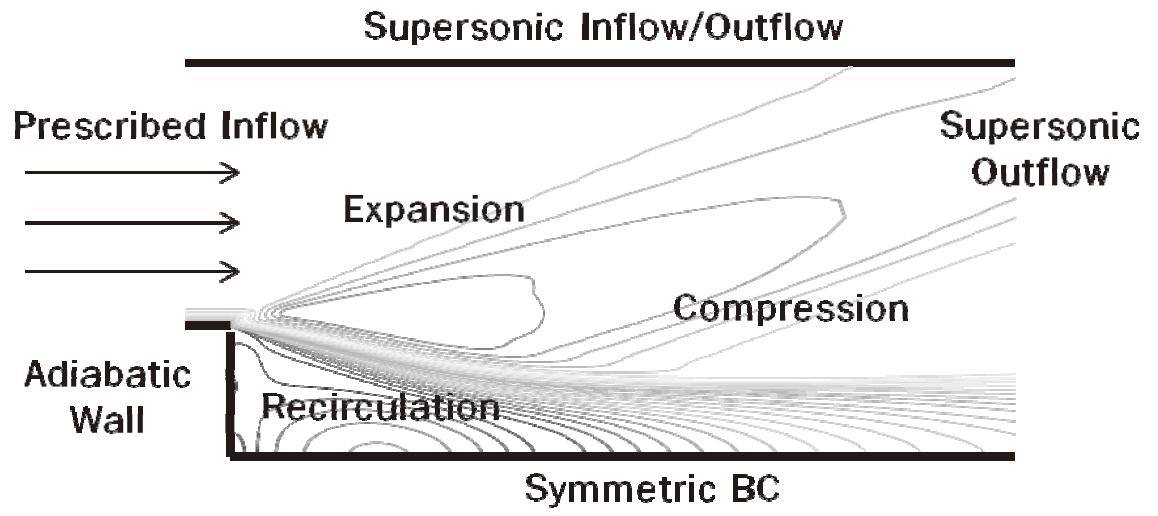
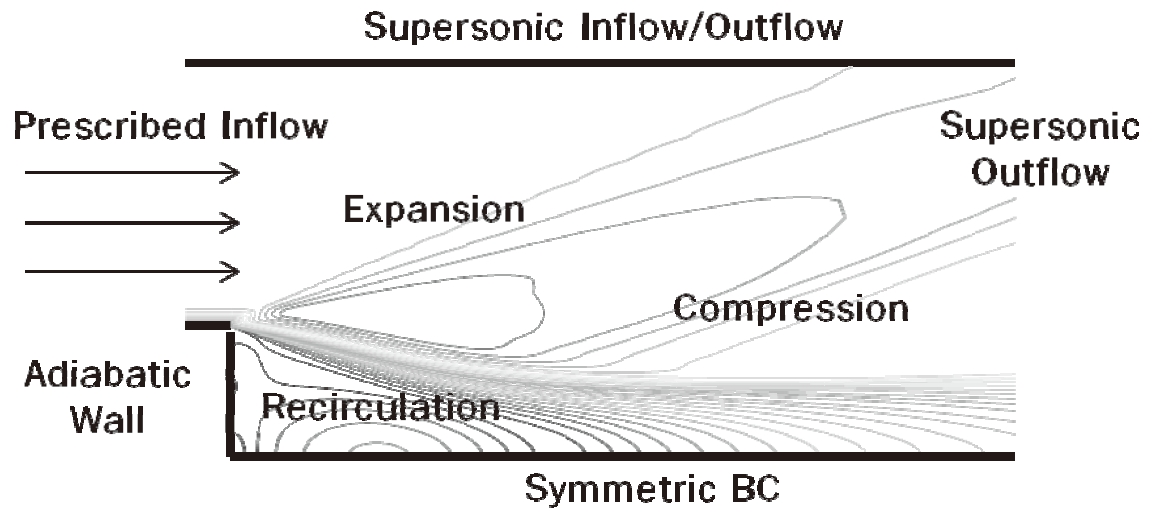
Supersonic base flows are characterized by several complex turbulent flow features as benchmark test problems in the aerodynamic drag prediction [1,2]. These flows are characterized by separating boundary layers that interact with the recirculating flow leading to a recompression region and a wake region [3]. Accurate prediction of such flow features requires advanced turbulence models, which include both the compressibility effects [4-5] and the non-equilibrium effects of turbulence [6]. For two-equation turbulence models, improvements in predictions have been achieved by reducing the production of the turbulent kinetic energy, or by increasing the dissipation rate of kinetic energy.
One of the important requirements for good turbulence models is the realizability condition that is not usually satisfied directly in any linear eddy-viscosity formulation [7]. Several researchers [8-12] have found that the realizability constraints could be fulfilled by decreasing the eddy viscosity, and that nonlinear eddy viscosity models or weakly nonlinear eddy viscosity formulations improve the performance of the turbulence models for flows in the presence of adverse pressure gradients, particularly involving shock wave/boundary-layer interactions. The realizability condition has been considered in several ways. For the k-ω SST model [11,12], the eddy viscosity formulation was derived based on the results of Bradshaw et al.[7] in the adverse pressure gradient regions. Coakley [8] and Durbin [9] proposed fundamentally identical corrections. The essential points regarding these corrections are to reduce the magnitude of the eddy viscosity and to produce an asymptotic behavior of the eddy viscosity coefficient when the mean strain rate leans toward infinity.
Several successful implementations of k-ε turbulence models [13-16] have also been made by reducing the eddy viscosity. A nonlinear eddy viscosity model of Craft et al.[15] used an eddy viscosity coefficient that is a function of the strain rate or the magnitude of vorticity and turbulent Reynolds number. Though the eddy viscosity function results in a reduction of the magnitude for the eddy viscosity when the mean strain rate is large, the function is essentially chosen to model the near-wall effects and to optimize the coefficients based on experimental data or Direct Numerical Simulations (DNS). Barakos and Drikakis [16] argued that the success of the cubic non-linear eddy viscosity is based on the functional coefficient used, not on the non-linear cubic expansion of the shear stresses. Therefore, an improved formulation for the k-ε turbulence model is likely to be achieved with the proper implementation of the realizability condition, rather than in the development of complex higher order constitutive relations.
In addition to turbulence modeling, spatial discretization schemes play an important role for the accurate prediction of base flows, since regions of high pressure and density gradients over a wide range of Mach numbers exist. The previous work [11] for the transonic flow past airfoils showed that the velocity profiles obtained from the second-order accurate spatial discretization of the turbulence variables are more accurate than the results obtained from the first-order accurate discretization of the turbulence equations. From the numerical experiments, the difference in the results obtained with schemes of different spatial accuracy was observed to be comparable to the differences in the results obtained with variants of the k-ε turbulence models.
In the present paper, several turbulence models have been examined. They include the variants of the Launder-Sharma k-ε model [13,14] adopting the eddy viscosity formulation of Craft et al.[15]. The performance of these various models was examined for supersonic base flows. The compressibility modifications [3-6] for the k-ε turbulence models were also investigated. Based on the results obtained, a simple modification based on the realizability principle is proposed to the Launder-Sharma model, and the prediction capability of the improved model was demonstrated.
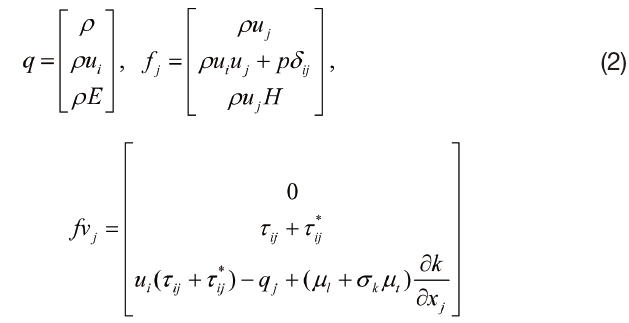
In the present work, the compressible Navier-Stokes equations and the k-ε turbulence equations were considered. The Navier-Stokes equations are

where q is the flow variable vector, and fj and fvj are the inviscid and viscous fluxes in each direction,
Here


where

2.1.1. The Launder-Sharma k-ε model
In the

where
and the convection and diffusion terms of the turbulence equations are expressed as
where S is the mean strain rate and the eddy viscosity is written in terms of

as

In the Launder-Sharma model, the eddy viscosity function is written as

where
In the above equations, ReT is the turbulence Reynolds number and the term D and E model the near-wall effects. The pressure-dilatation term

will be described later. The term D models the ‘anisotropic part’ of the dissipation rate where
is the ‘isotropic’ dissipation rate:

The low-Reynolds term E is expressed as

The closure constants of the Launder-Sharma model are

In this paper, the term
In order to stabilize the computation and prevent excessive turbulent kinetic energy, we impose a direct limiter on the Launder-Sharma model as

This realizability-like limiter is applied at every iteration step as in [11] and has an effect similar to the realizability condition.
2.1.2 A linear version of the k-ε Craft model
Craft

The function cμ was optimized so that the predicted variation of the Reynolds stresses with strain rate is in good agreement with both experimental and direct numerical simulation data from a homogeneous shear flow. In the present linear version, Eq. (15) is used in the eddy viscosity expression but with a linear stress-strain relationship in Eq. (16). Craft
2.1.3 A modified Launder-Sharma (LS) model
The

Equation (17) dramatically improves the robustness of the Launder-Sharma model without the need for applying direct limiters, such as Eq. (14), to turbulence quantities. Equation (17) can be viewed as another form of the realizability constraint: it accepts the Launder-Sharma eddy viscosity so long as it is well-behaved, but limits it with a realizability model once the eddy viscosity exceeds some bounds. This will be referred to as the modified LS (MLS1) model.
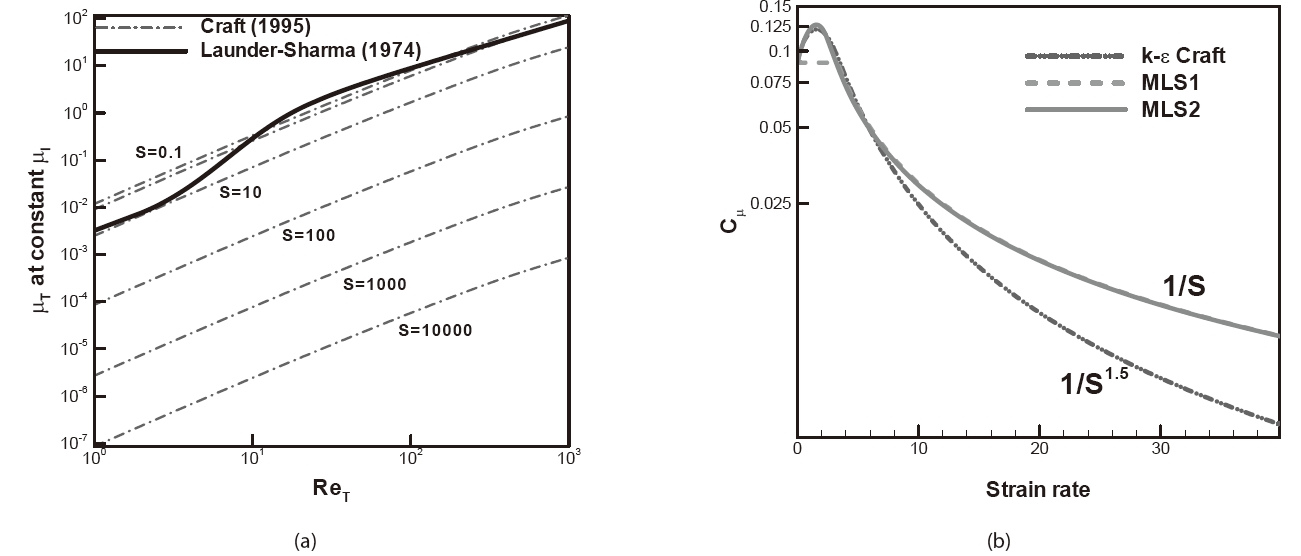
Barakos and Drikakis [16] examined the performance of the cubic non-linear eddy viscosity models and found them to be superior to the linear models based on the linear stress-strain relations. They argued that the success of the Craft et al. model [15] comes from the functional cμ expression utilized, and not from the non-linear cubic expansion of the shear stresses. Based on their arguments, it would be worthwhile to use a functional
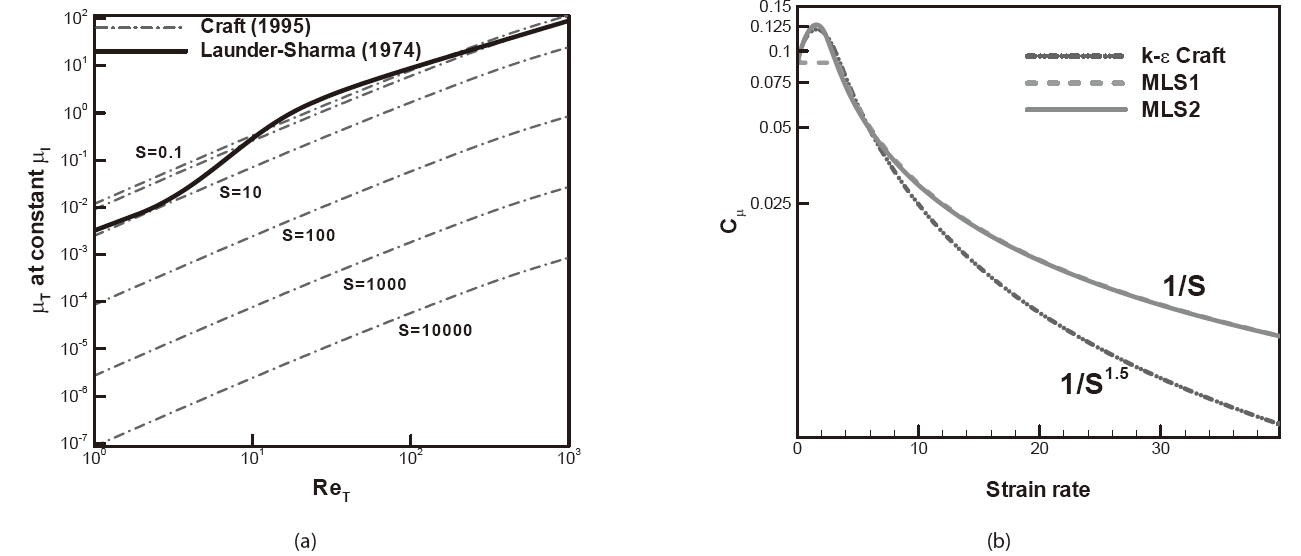
which was optimized from the DNS and numerical data, exceeded 0.09 at the region of small strain rates. The present numerical experiments show that this aspect provides good velocity distributions in the recirculating region.
The obvious difference between the expression proposed here and that proposed by Craft et al. is that Eq. (15) is inversely proportional to the
and Eq. (17) is inversely proportional to
respectively. This difference might cause a different behavior in the TKE production term in each model. We follow the analysis noted by Thivet et al.[18] in order to explore potential improvements in regards to the realizability constraint. When crossing a shock wave normal to the x direction, the strain rate behaves like:

The production Pk, which, summed up over the cell volumes, can be written as:
We can easily find the production term of the


The results show that the production rate of the linear Craft model is proportional to √Δ
As shown in Fig. 1(b), the resulting formulation, Eq. (22), follows the variation of the Craft model at low non-dimensional strain rates and the realizability bound at high strain rates.
2.2 Compressibility Modifications
In order to account for the compressibility effects, the models of Sarkar [4], Wilcox [5] and Ristorcelli [6] are considered; they account for the dilatational dissipation, which represents the added rate of dissipation regarding turbulent kinetic energy. The dissipation rate ε in the k equation can be split into a solenoidal part and a dilatational part, c, which is defined by the compressibility modification used:
2.2.1 Sarkar model

where

2.2.2 Wilcox model
Here, the compressibility term is modeled as:

where H is the heaviside step function.
2.2.3 Ristorcelli model
Ristorcelli [6] proposed a compressibility modification for dilatational dissipation and pressure dilatation through statistical data and theory. Though his model has a number of heuristic constants and complex terms (not shown in this paper), it is shown to distinguish the characteristics of the compressible free shear layer from that of the boundary layer. Here, a simplified model is used, which has the leading terms of the original Ristorcelli model:


where
and
As shown in Eq. (26) and Eq. (27), the dilatational dissipation is very small
compared to the other compressibility modifications and the pressure-dilatation term is dominant when the flow is in a non-equilibrium state.
The governing equations in the physical coordinate system were transformed into computational body-fitted coordinates and were discretized by a cell-centered finite volume method. The HLLE+ [19] and the third-order MUSCL schemes [20] were used with the minmod limiter to obtain second-order spatial accuracy. Central differencing was applied to obtain variable gradients of the viscous flux. As discussed in [11], a second-order scheme for the turbulence variables produces more accurate flow predictions compared to those from a first-order scheme for separated flows. To enhance the robustness for supersonic flows, the same MUSCL second-order scheme, which was used for the Navier-Stokes solver, was also employed for the turbulence variables.
The diagonalized alternating-direction implicit (DADI) method was used as the solver to determine the steady-state solutions [11]. It should be noted that the contribution of the viscous terms cannot be simultaneously diagonalized, in contrast to the inviscid terms, and it was added in the implicit part only through an approximation of spectral radius scaling. An algorithm was used to integrate the Navier-Stokes and the turbulence equations sequentially. In the present implicit algorithm, the turbulence equations were iterated only once per time step because more iterations do not reduce the total computing time for the implicit method. The source vectors for each turbulence model were treated implicitly, because otherwise, it would have resulted in a stiffness problem in the time-marching methods. The contributions of the turbulent dissipation terms were added in the implicit parts to increase the diagonal dominance, whereas the production contributions were treated explicitly. Additional details regarding the numerical scheme used to solve the Navier-Stokes and the turbulence equations can be found in [11] and the source term linearization method is well documented in [21].
Boundary conditions affect the accuracy as well as the
convergence of the numerical scheme. At the solid walls, no-slip conditions for velocities were applied and the density and energy were extrapolated from the interior cells. The value of k and
was set to zero at the wall for the present
4. Numerical Results and Discussion
To examine the performance of the turbulence models, a turbulent supersonic flow[1-3] past an axisymmetric base was studied. The freestream conditions were
Results were obtained with the four 2-equation turbulence models discussed earlier: (1) the Launder-Sharma
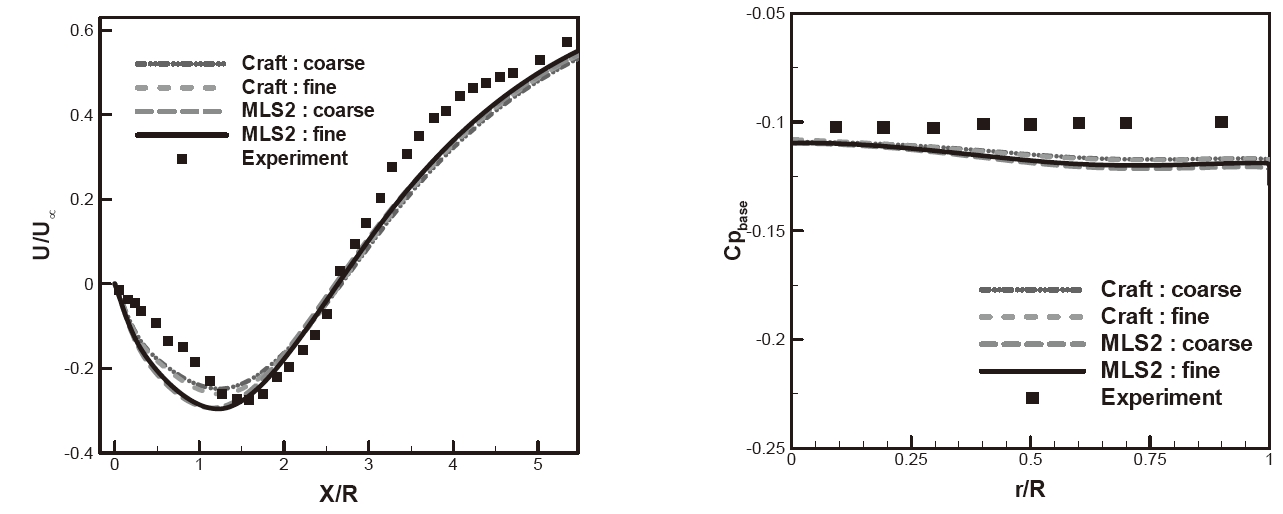
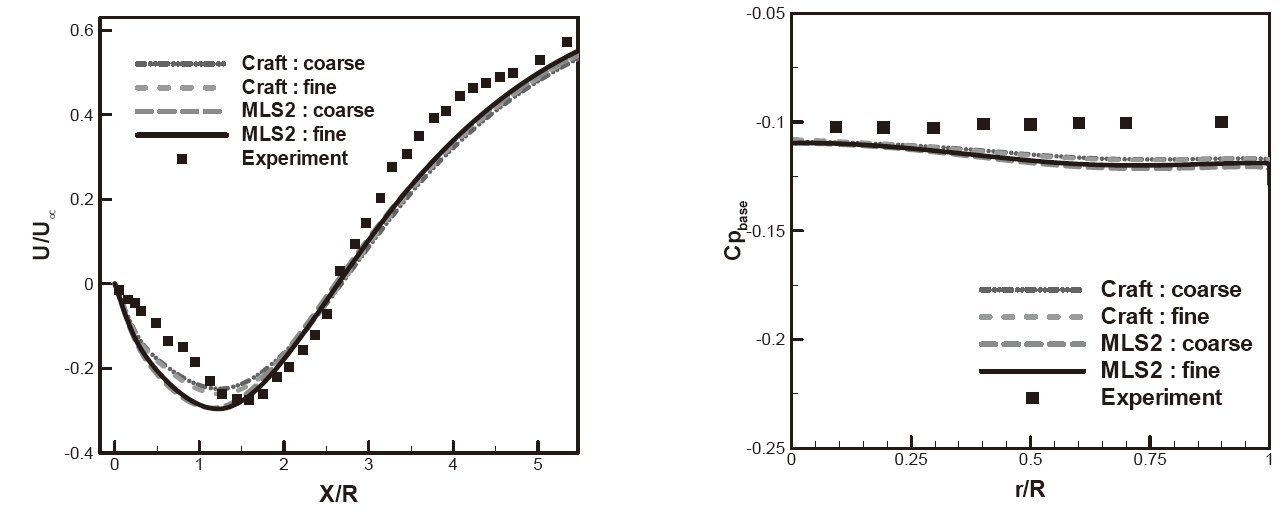
The computational grid consists of two blocks with 33×65 and 321×213 node points in each block. The smaller block was upstream of the step while the larger block was downstream. For grid independence, a coarse grid that was made of 21×51 and 201×150 node points was also used. The grids were stretched toward the wall in order to resolve the laminar viscous sub-layer. Centerline velocity and radial pressure profiles at the wall for the coarse and fine grids are shown in Fig. 3, respectively. Results were shown for two turbulence models (the Craft model and MLS2). The centerline velocity and radial wall pressure results on the two grids were nearly identical. The fine grid results were therefore expected to be grid independent. Unless otherwise stated, results were presented from the fine grid.
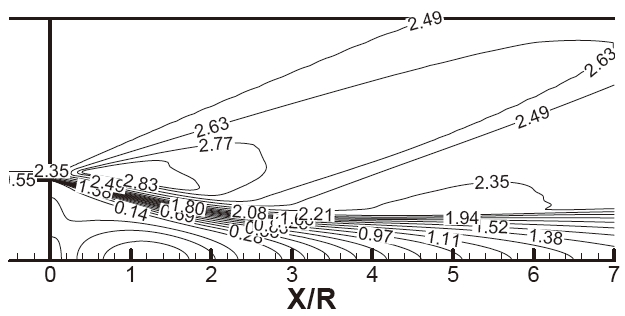
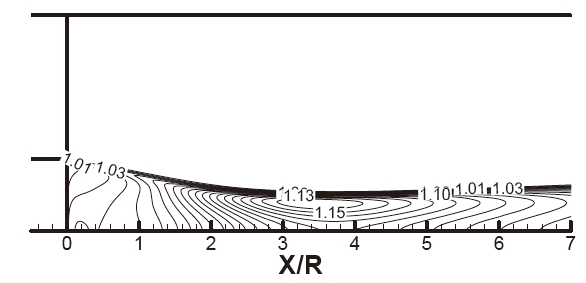
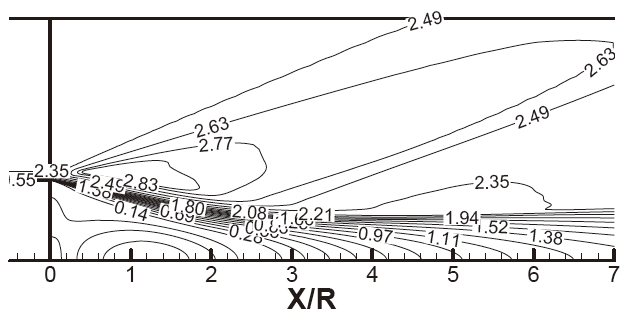
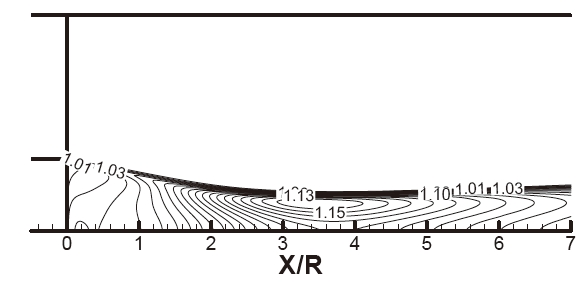
Figures 4 and 5 display field contours of Mach number and compressibility factor, (1+M2
the recirculating region. The Mach number contour shows an expansion at the corner and recompression of the main stream. Sharp velocity gradients of the free shear layer cause the production of turbulent kinetic energy (TKE). The maximum value of the turbulent Mach number (Mt) is approximately 0.4 at the
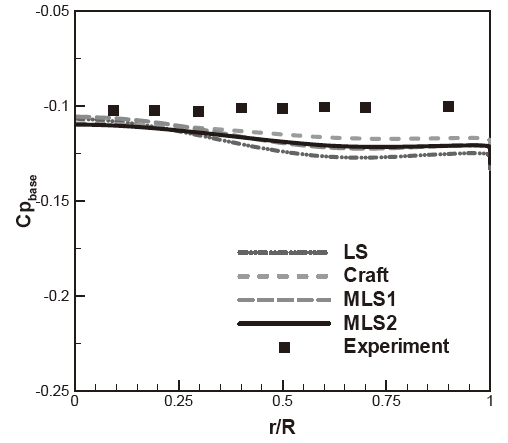
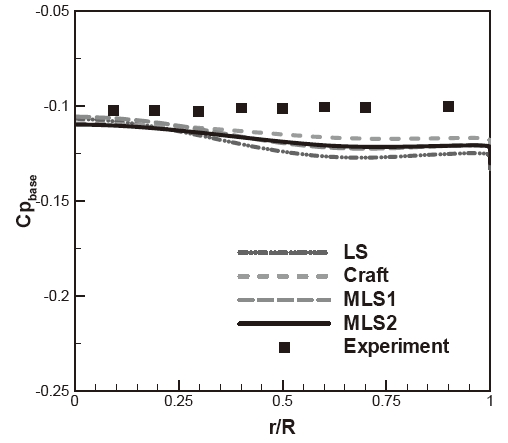
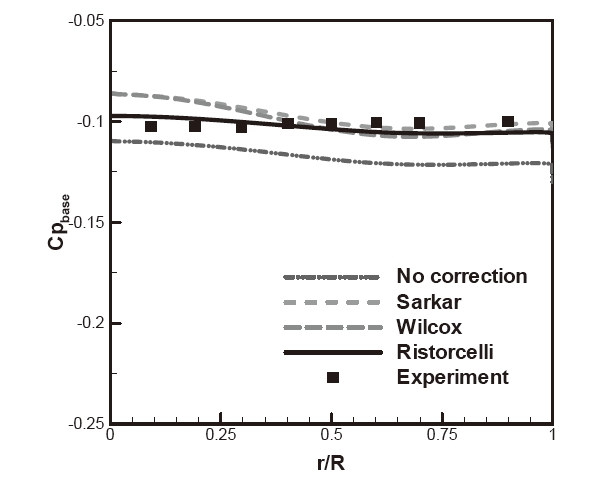
Figure 6 shows the pressure distributions along the base for different turbulence models. The base pressures predicted by the
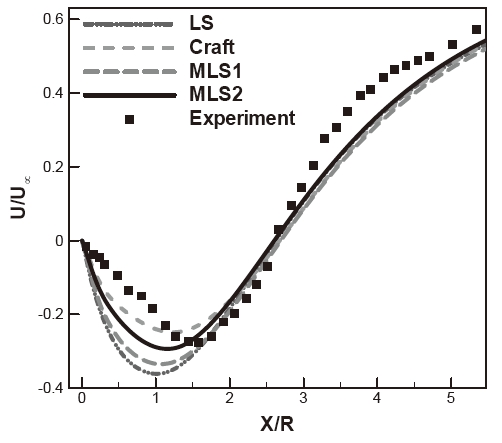
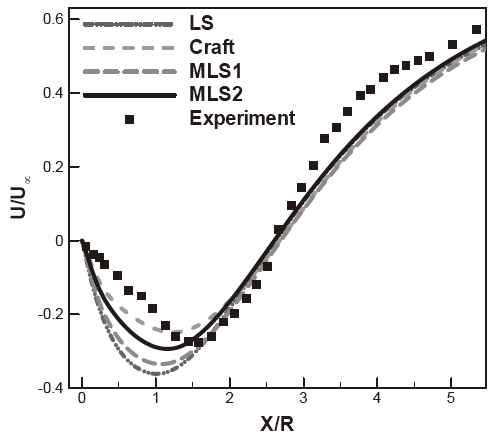
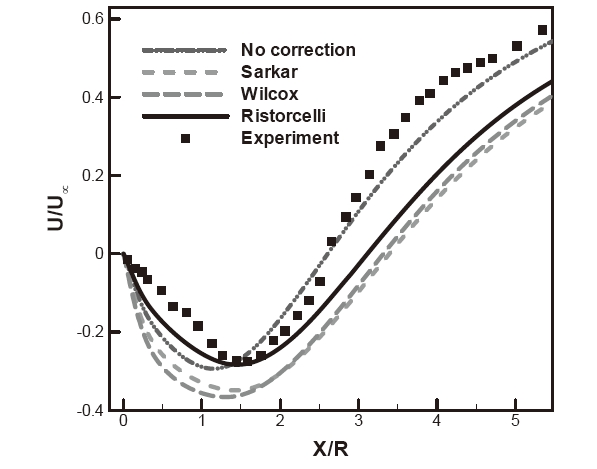
The streamwise velocity distributions along the centerline
are shown in Fig. 7 for the various turbulence models, and demonstrate the advantages of the present formulation. The Craft model gives better agreement with the experimental data compared to the other
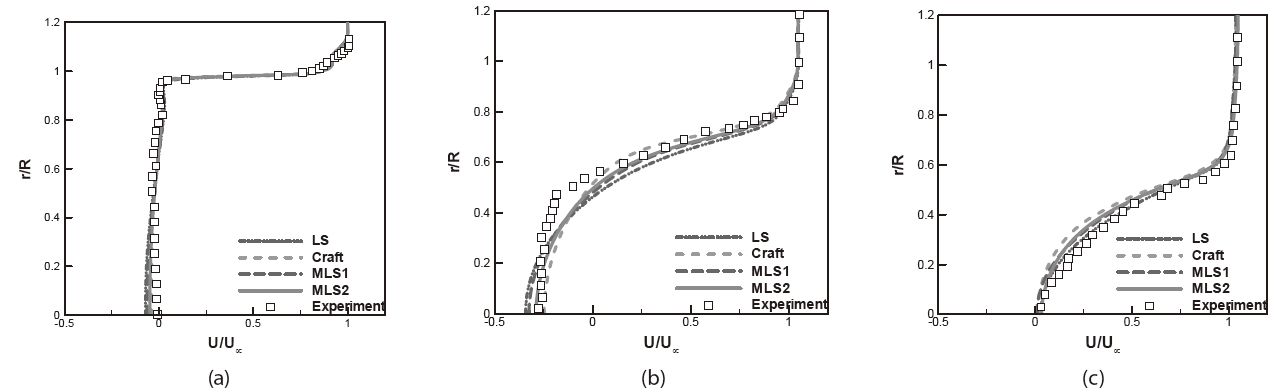
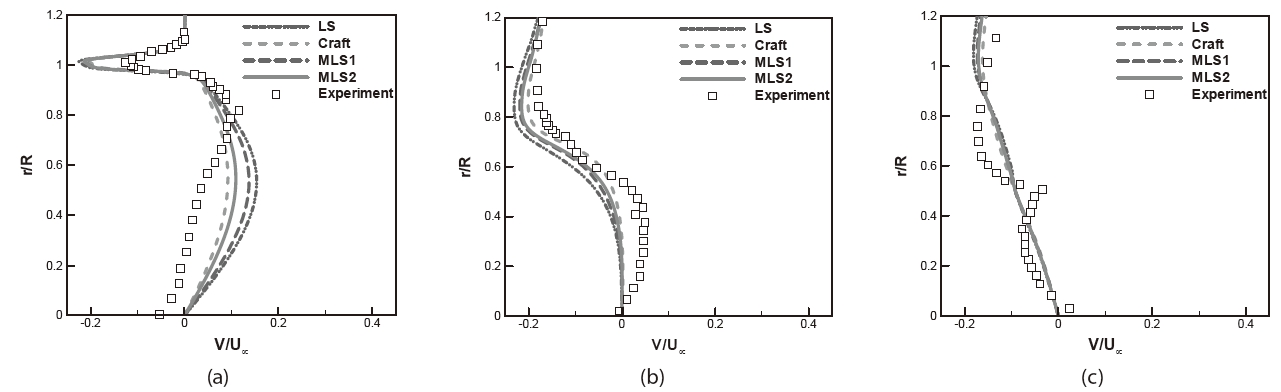
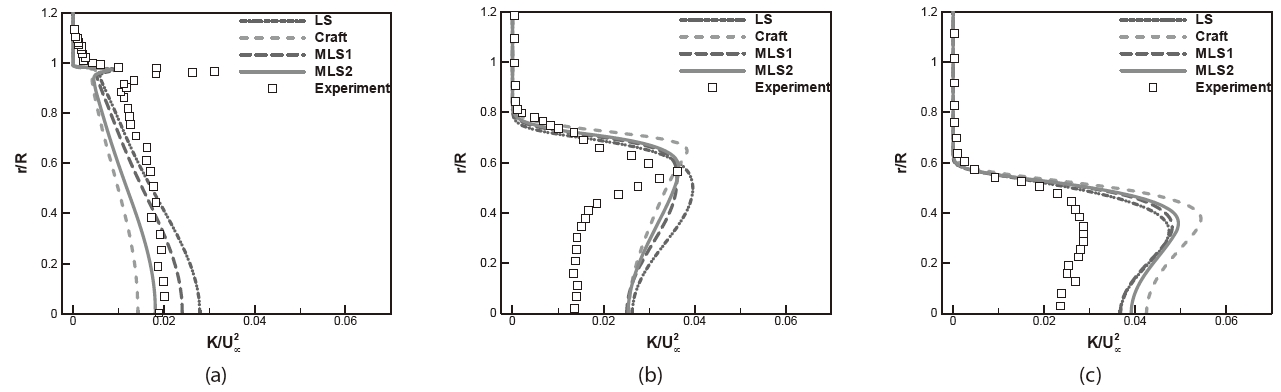
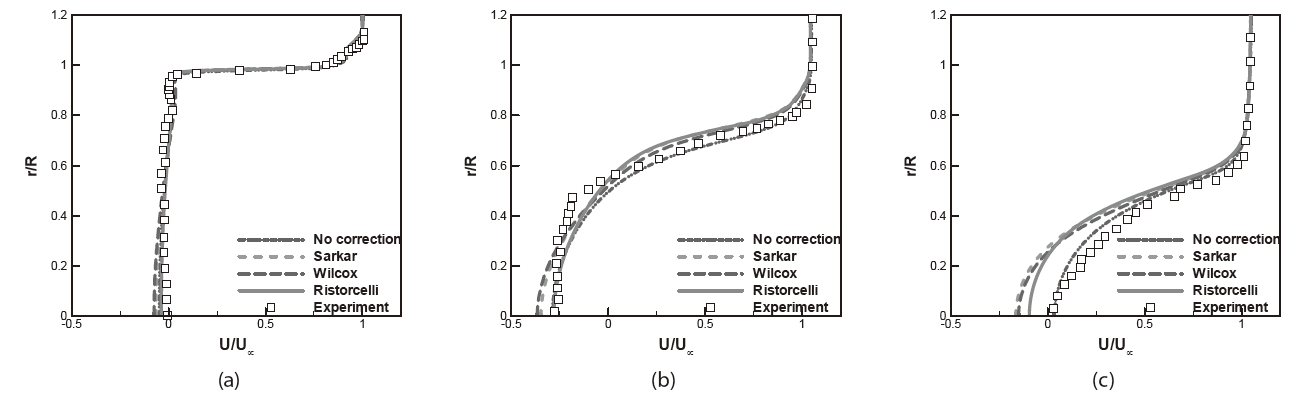
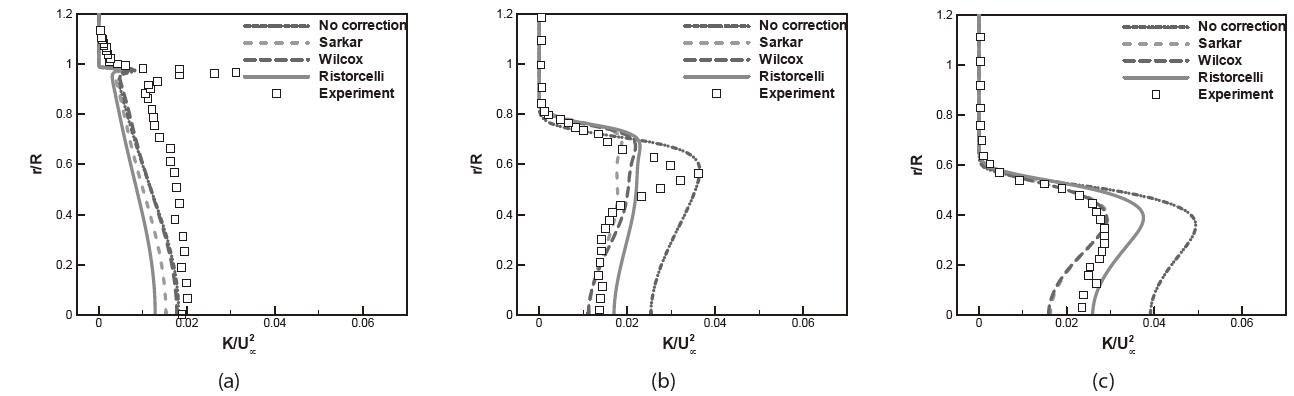
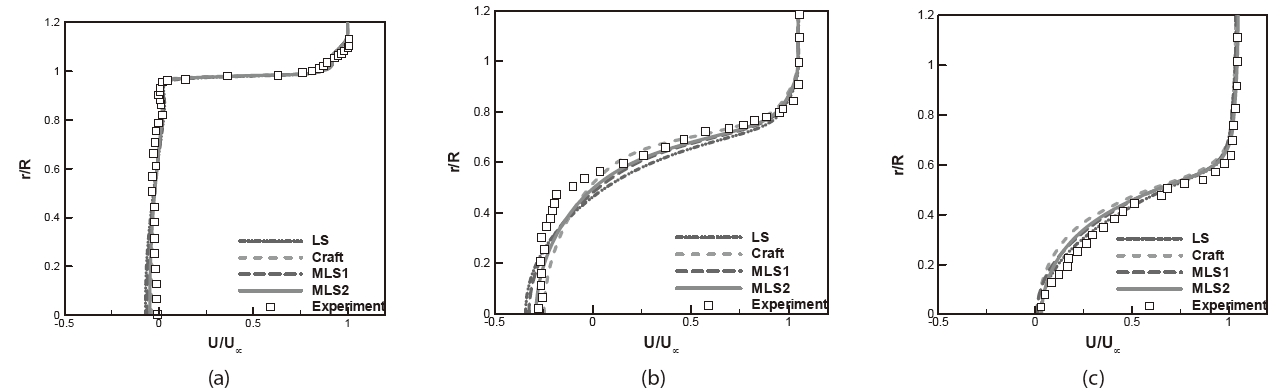
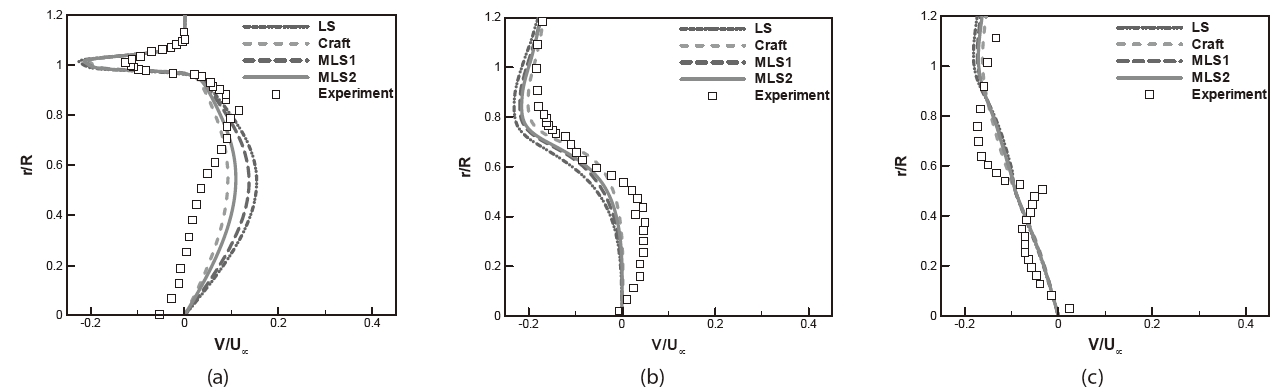
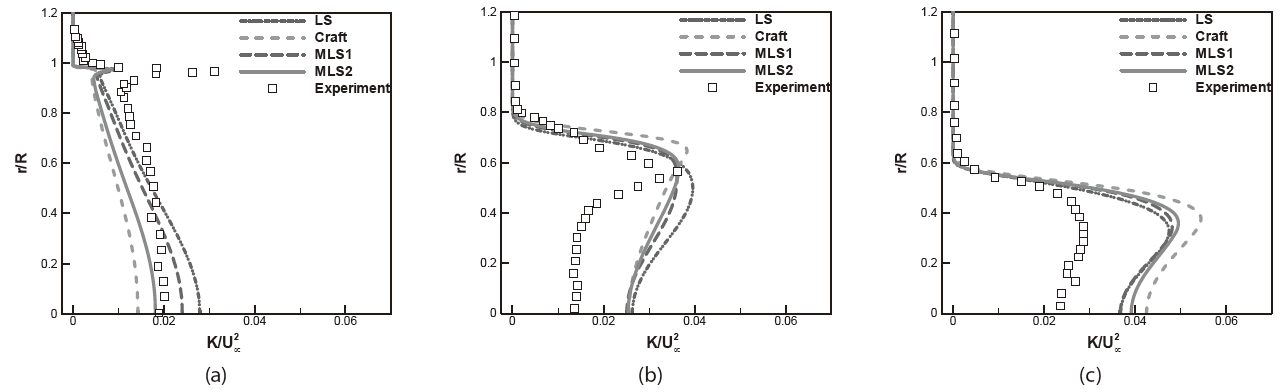
Figures 8 and 9 display U and V velocity profiles at specified streamwise locations. The turbulent kinetic energy profiles are compared in Fig. 10. The
in best agreement with the data. As shown in Fig. 10, the Craft model produced smaller TKE than the other models at
The only difference between the
coefficients in
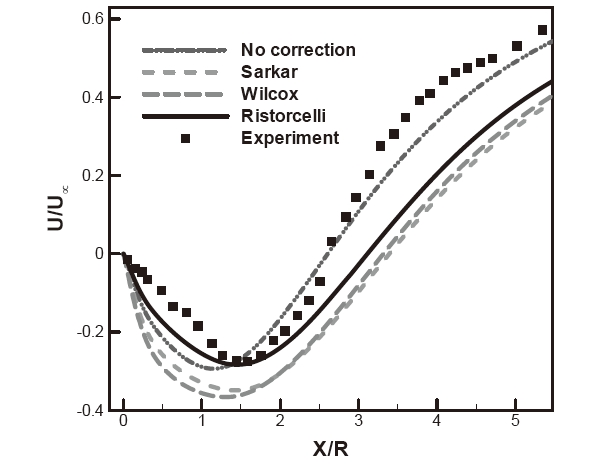
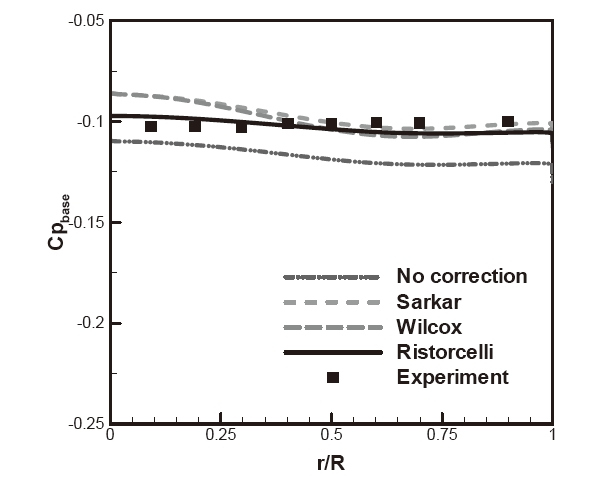
Streamwise velocity distribution along the centerline is displayed in Fig. 11 for the MLS2 model with compressibility modification. The Sarkar and the Wilcox compressibility modifications produce longer reattachment length and larger peak reverse velocity. These models introduce additional amounts of the TKE dissipation in the k equations, which is proportional to the square of the turbulent Mach number. The addition of the dissipation results in the reduction of the turbulent mixing and the increase in the reverse velocity. The simplified Ristorcelli model gives more accurate velocity distribution in the recirculating region and shows that the Ristorcelli model is superior to the other models with regards to the present non-equilibrium flow. The advantage of the Ristorcelli model is also shown in Fig. 12 for the wall pressure distribution. All modifications increase the pressure coefficient. The Sarkar and Wilcox models produce somewhat larger variations of the pressure distribution than the Ristorcelli model. The mean magnitude of the wall pressure of the Ristorcelli is in excellent agreement with the experimental data.
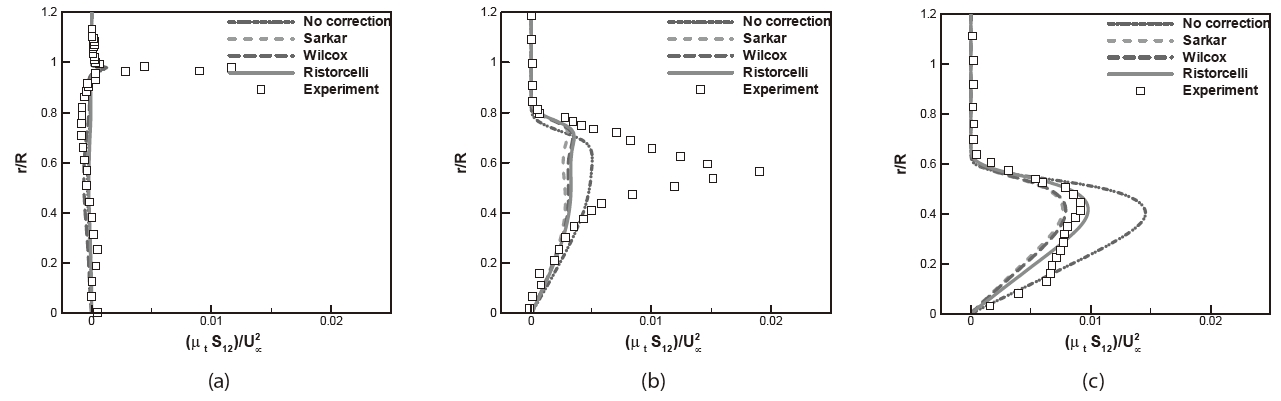
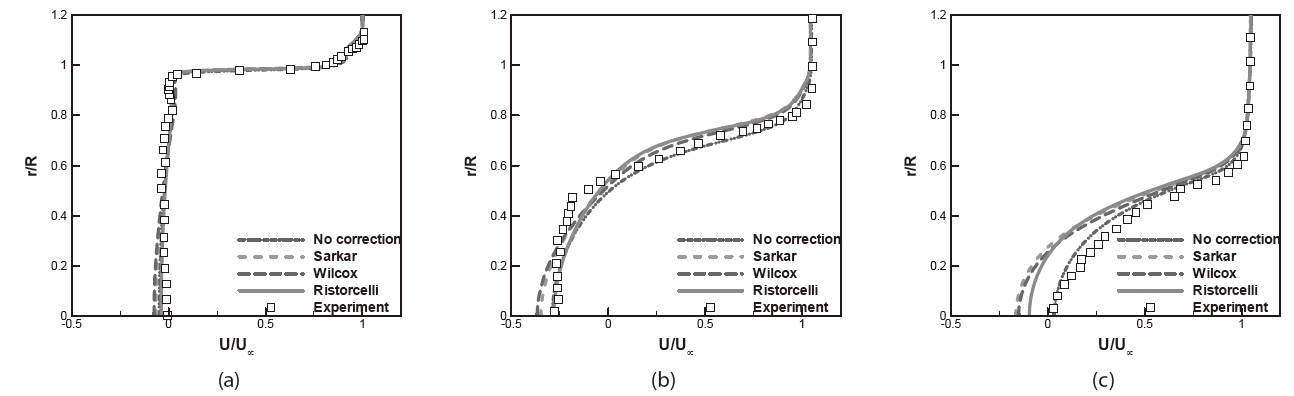
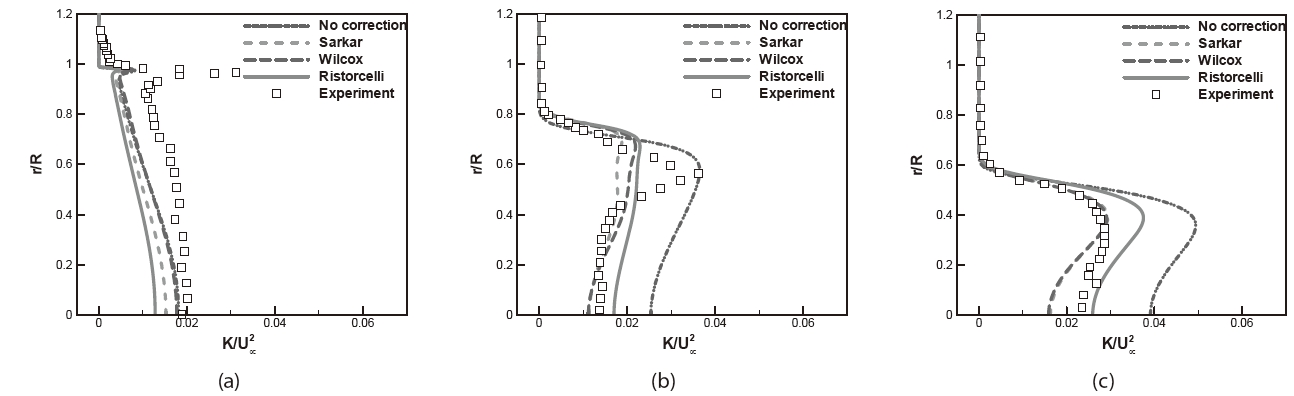
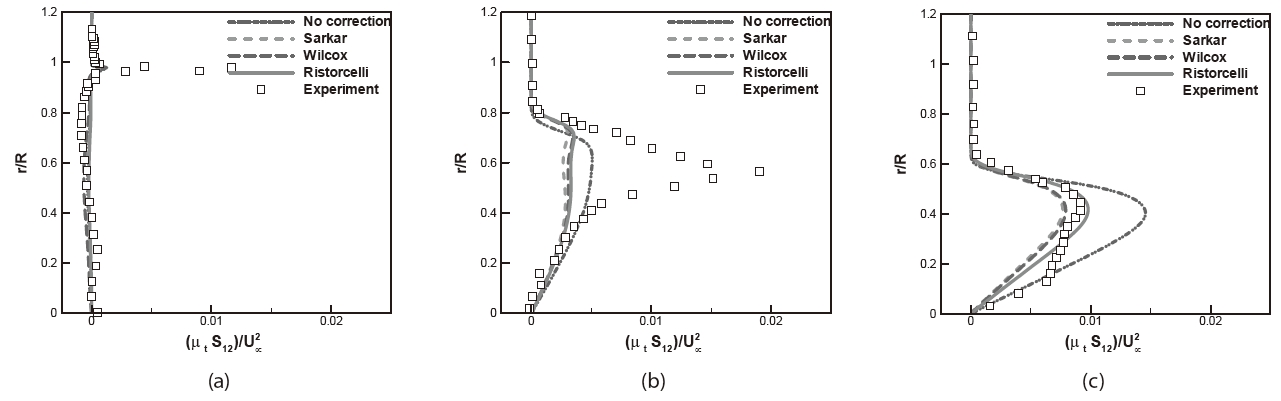
Velocity profiles, TKE, and primary Reynolds stress profiles with compressibility modification are examined in Figs. 13-15 for the MLS2 model. A more noticeable effect of these corrections can be observed in the TKE and the primary Reynolds stress profiles. As discussed earlier, the compressibility modification decreases the production of TKE and the Reynolds stress, particularly at
The performance of the
supersonic base flow and two types of modification to the