Satellite devices for fine attitude control of the Science & Technology Satellite-2 (STSAT-2). Based on the mission requirements of STSAT-2, the conventional analog-type sun sensors were found to be inadequate, motivating the development of a compact, fast and fine digital sun sensor (FDSS). The FDSS uses a CMOS image sensor and has an accuracy of less than 0.03degrees, an update rate of 5Hz and a weight of less than 800g. A pinhole-type aperture is substituted for the optical lens to minimize its weight. The target process speed is obtained by utilizing the Field Programmable Gate Array (FPGA), which acquires images from the CMOS sensor, and stores and processes the image data. The sensor accuracy is maintained by a rigorous centroid algorithm. This paper describes the FDSS designs, realizations, tests and calibration results.
An attitude determination system for satellites is developed by using the data measured by attitude sensors, such as the sun sensor (SS), earth horizon sensor (EHS), magnetometer (MAG), fiber optic gyro (FOG) and star tracker (ST). Among these sensors, the sun sensors especially have been used widely to determine coarse and fine attitudes. Analog-type sun sensors have been developed for Korea Institute Technology Satellite (KITSAT)-1, 2, 3 and Science & Technology Satellite-1 (STSAT-1) over the past decade. These analog sun sensors have an accuracy of less than 1 degree.
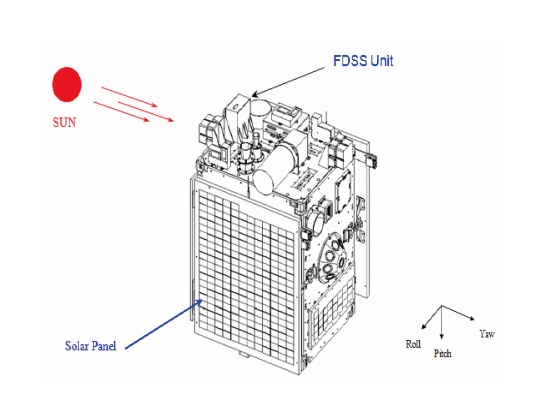
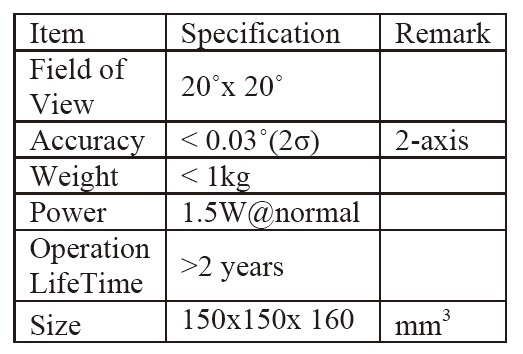
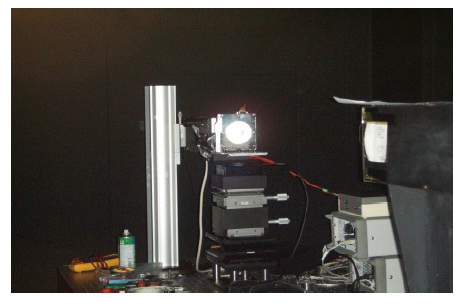
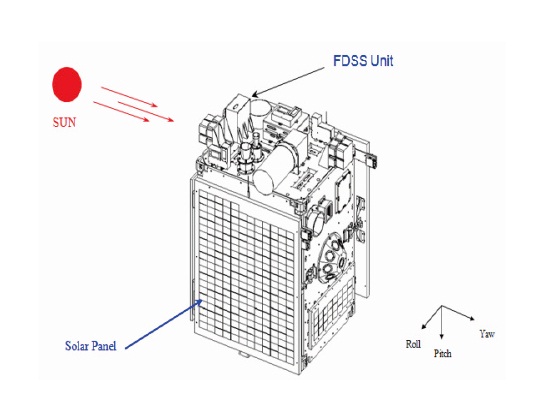
Based on the mission requirements of STSAT-2, the conventional analog- type sun sensors were found to be inadequate, motivating the development of a compact, fast and fine digital sun sensor (FDSS) [1,2]. The main objective of the FDSS is precise attitude determination of STSAT-2 for precision sun pointing missions and new major technology development projects. The target process speed is obtained by utilizing the Field Programmable Gate Array (FPGA), which acquires images from the CMOS sensor, and stores and processes the image data. The Field Of View (FOV) is 20×20 degrees for each axis. The sensor accuracy is maintained by a rigorous centroid algorithm. FDSS mounted on STSAT-2 is shown in Fig.1. Table 1. shows the specifications of FDSS
[Table 1.] Specifications of FDSS
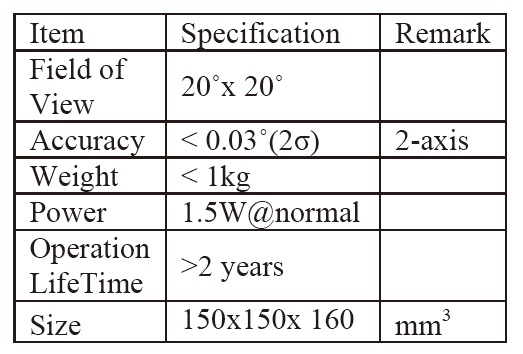
Specifications of FDSS
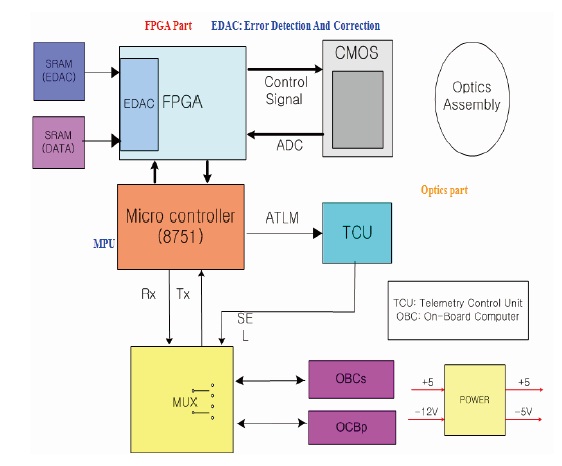
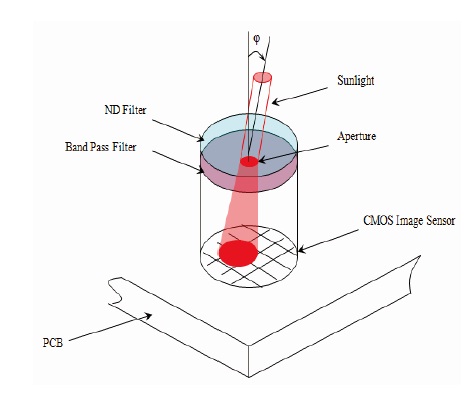
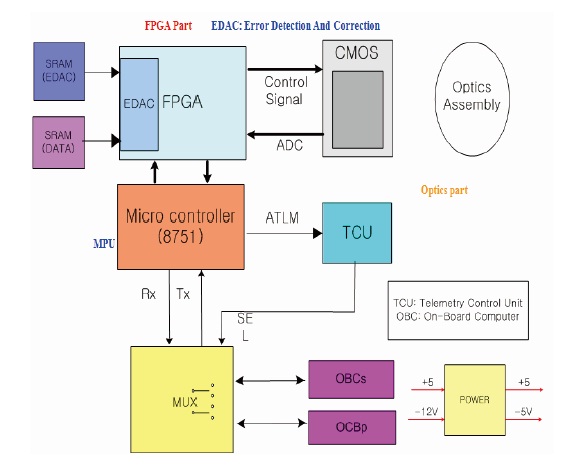
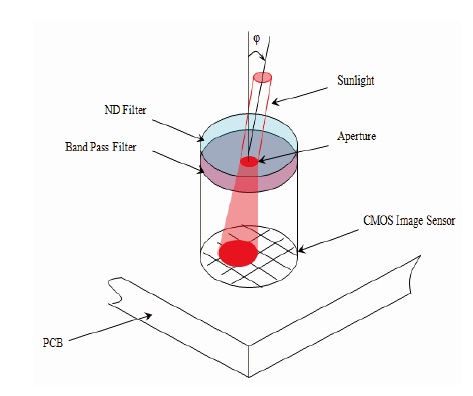
The basic principles of the FDSS are as follows. Sunlight passes though the aperture of the FDSS and is projected onto the surface of the CMOS image sensor. Each pixel of the CMOS image sensor converts the projected sunlight into 10-bit digital signals. These signals are stored by the FPGA, which generates and controls the 10-bit digital signals. The Micro Processor Unit (MPU) reads the stored data from the FPGA, calculates the entrance degree of the sunlight ray, and provides the calculated entrance degrees to the On- Board Computer (OBC),which determines the attitude and processes the control program. The FDSS is divided into three parts, as shown in Fig. 2. The first part is the optical part: sunlight passes though aperture, is attenuated by the Neutral Density Filter (NDF) and filtered by the Band Pass Filter (BPF). The optical part projects the sunlight onto the surface of the CMOS image sensor. The second part is the FPGA part: this part generates the control signals and sends these signals to the CMOS image sensor. The
second part stores the data acquired from the CMOS image sensor and communicates with the the micro process unit (MPU) by using data packets. The third part is the MPU: it communicates with the OBC and calculates the incident angle of the sunlight using the centroid algorithm.
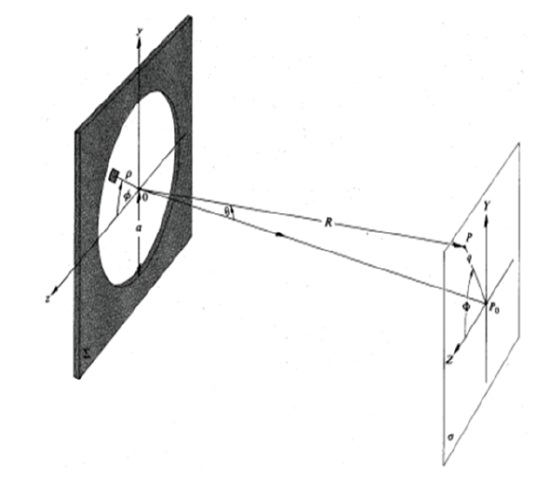
Fig. 3 describes the schematic of the optical part on the FDSS. The sunlight enters the aperture with the radius of
2.3 Diffraction characteristics of the aperture
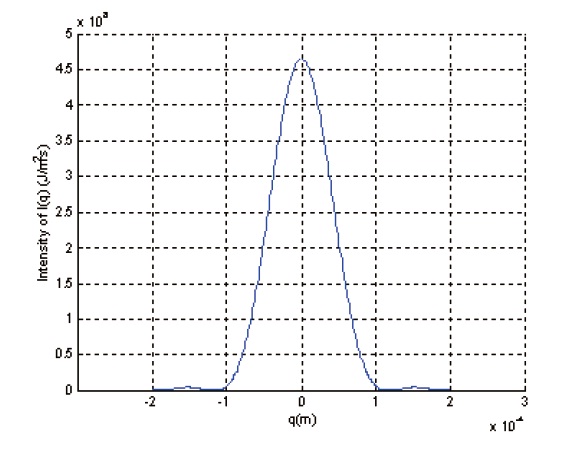
The characteristics of the sunlight on the surface of the COMS image sensor need to be analyzed in the optical system. Particularly, the intensity of the sunlight must be decreased to prevent it from exceeding the allowable electrical threshold of the CMOS image sensor. After considering the diffraction effect, a stable wavelength is chosen for the BPF.
The optical characteristics of the FDSS and the distribution of the sunlight energy need to be considered for the detection of the incident angle.



where
the
That I(q) is twice as long as the diameter of the aperture in length.
Because of

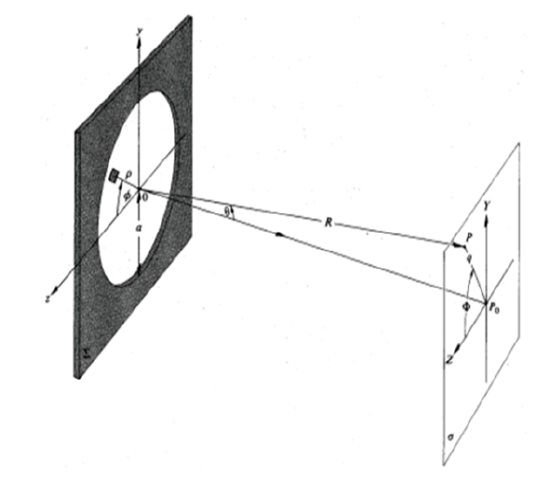
where a is the radius of the aperture; b is the maximum symmetric distance of the aperture through which the sunlight passes ; Φ is the rotation angle on the y-z plane about the z axis; and q is the distance between the center and the diffraction pattern.

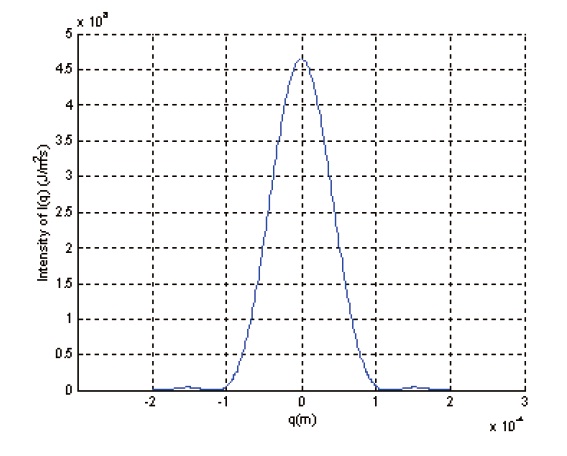
Eq. (5) shows that I(q) becomes zero when q =116μm. This illustrates the fact that I(q) is twice as long as the diameter of the aperture in length.
Fig. 5 displays the diffraction distance of the aperture. The ratio of the first diffraction pattern and the total diffraction energy is calculated as follows

Eq. (6) shows that most energies concentrate within the first circular diffraction (
The pixel efficiency is approximately 7%. When the pixels are at a right angle to the sunlight, the energy distribution of the sunlight by the diffraction effect and the allocation of the sunlight energy are calculated as follows.
Eq. (4) uses the Cartesian coordinate system. Therefore, Eq. (4) needs to be changed as follows

where
Based on Eq. (7), the energy radiated into the central pixel for 0.1 second is

Using Eq. (8), the locations of the other pixels close to the center pixels can be calculated. The first airy disk is plotted by the pixels, as shown in Fig. 5.
Electrons are generated by the photo effect. The energy of an electron is

Eqs. (10) and (11) can be used to calculate the number of electrons generated.


We designed a filter for the attenuation of the sunlight. The sunlight’s intensity needed to be decreased by using the NDF because the intensity was too strong. Using the above results, Eq. (12) shows the percentage of attenuation that a filter would need to achieve.

A 5.44% filter has to be used. If the transmittance of
the NDF is low, the S/N characteristics of the CIS tend to decrease. Therefore, there needs to be a trade-off between the NDF and BPF to obtain the optimal performance [4]. An appropriate exposure time and sampling time are also chosen by the designer. Also the developer should consider the stability of the MPU and the FPGA
3. Calculation algorithm for the incident angle
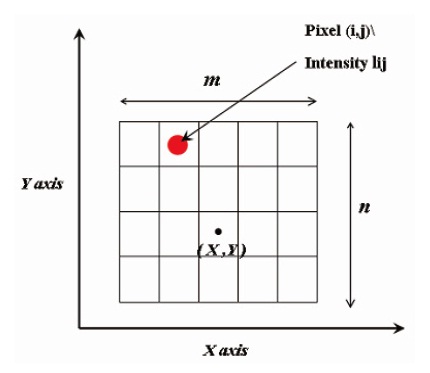
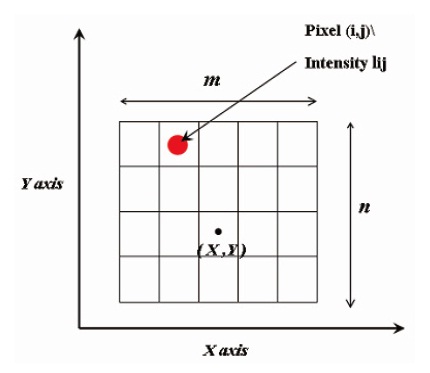
The center of the aperture, through which the sunlight passes at an incident angle, must be found. For this purpose, a sunlight image was projected onto the pixels of the CMOS image sensor. Among the several algorithms that can be used to find the center, the centroid algorithm is well-known and popular, given as Eq. (13).
Fig. 6 shows the size of the CMOS sensor. X and Y are the center coordinates calculated by the centroid algorithm. The incident angle error of the sunlight was simulated, and the maximum error was less than 2.0E-4degrees.
i, j : Number of pixels.
l : Intensity of each pixel.
The incident angles of the sunlight to the x-axis and y-axis are


h : the height between the CMOS image sensor and the aperture.
X : distance of the pixel on x axis.
Y : distance of the pixel on y axis.
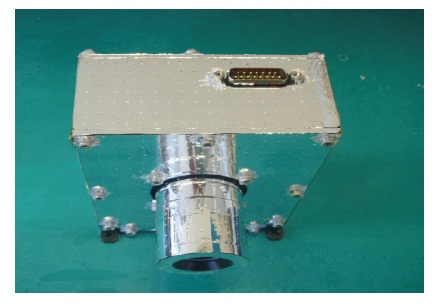
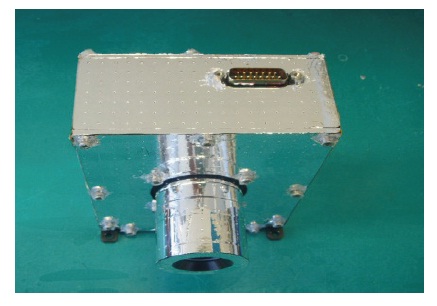
Fig. 7 is a photo of the developed FDSS for FM. It has been prepared for use in space. It is coated for thermal control.
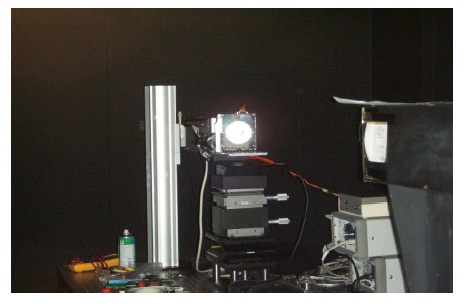
The test facility for calibration consists of the solar simulator, a 2-axis rotary stage, and a collimator in the Satreci optical room. The solar simulator has AM1.5 precision, and the 2 axis rotary stage has 1/1000mm resolution accuracy [7].
Fig. 8 shows the calibration facility of SI (SaTReC Initiative) for the FDSS.
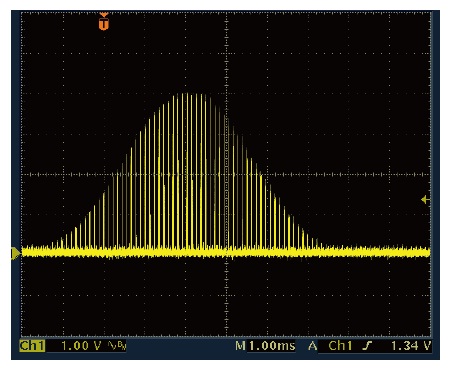
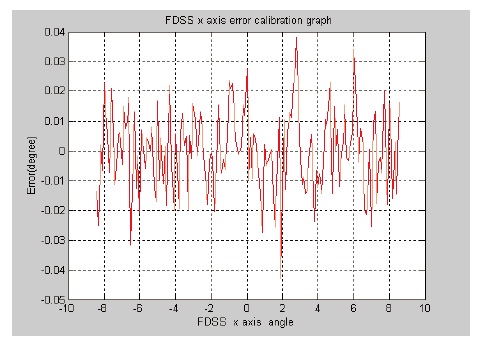
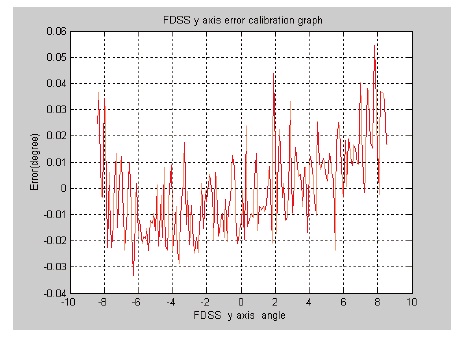
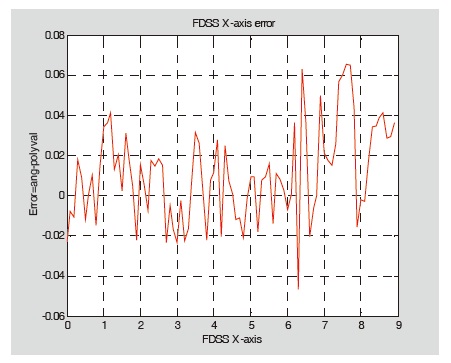
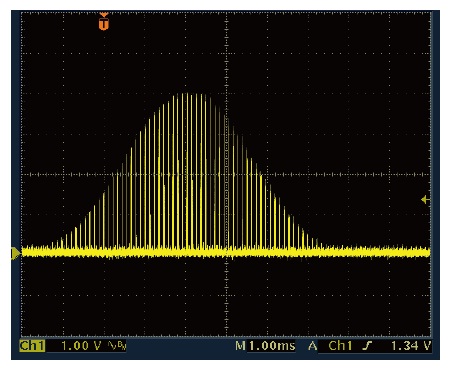
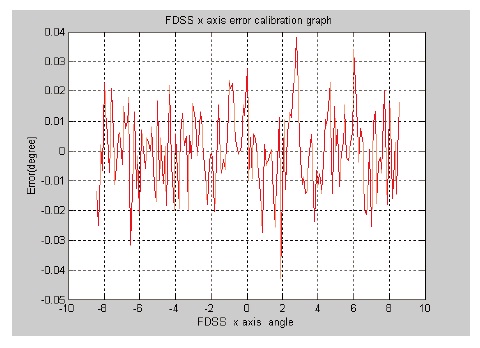
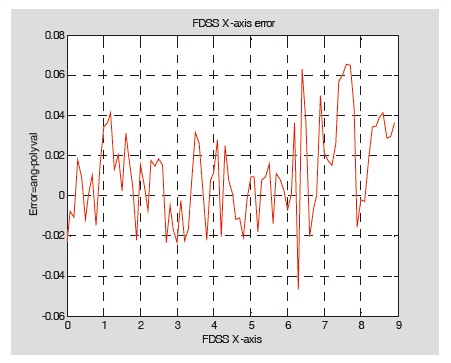
Fig. 9 shows the signal of CIS when the sunlight enters to the pin hole. This wave is similar to the analyzed waveform. This waveform is suitable for the application of the algorithm. Fig. 10 shows the graph of the errors versus the x-axis when the horizon axis degree is zero. The error range is within the accuracy of the 0.03 degrees [7].
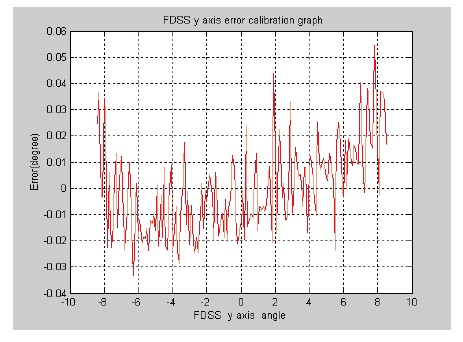
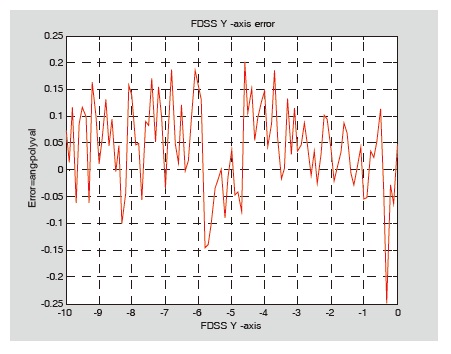
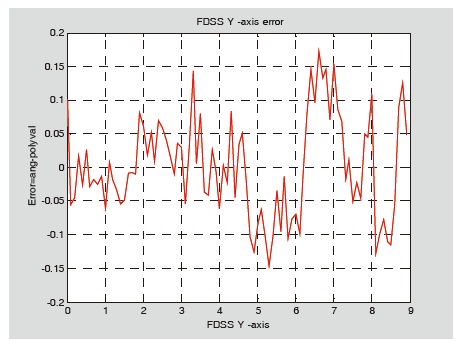
Based on the results, the target accuracy can be obtained. Also Fig. 10 shows the graph of the errors versus the y-axis when the horizon axis degree is zero. The algorithm is very important for obtaining accurate and best performance.
Therefore, better algorithms need to be studied for highlevel, fine digital sensors.
Table 2 provides the measurement errors of the two axes. We measured the real error of the FDSS; it was less than a 0.032 degrees, which FDSS requires.
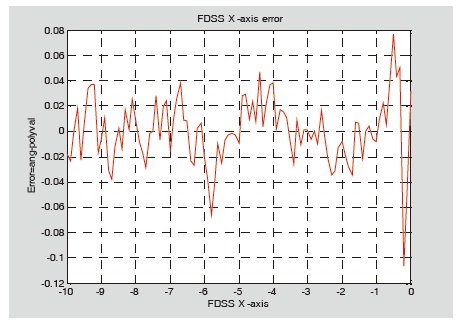
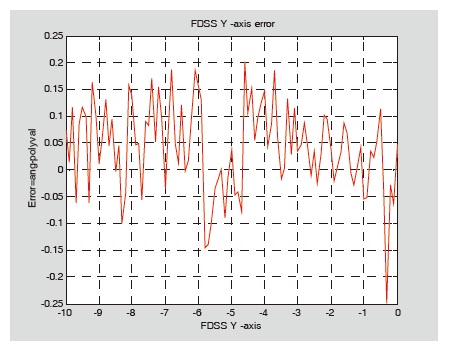
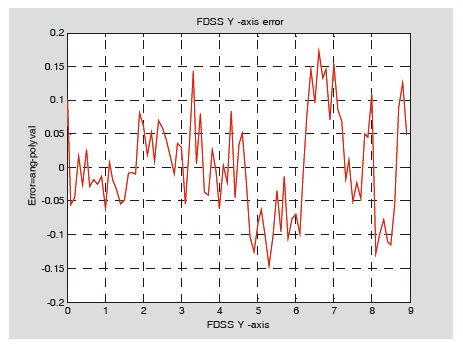
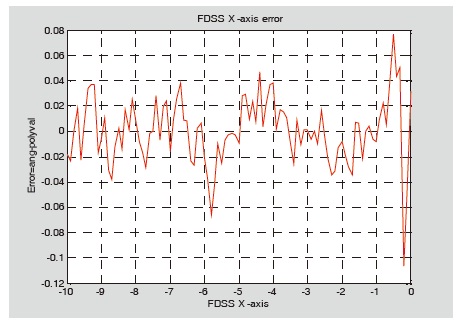
Fig. 12, 13, 14, and 15 show the x -axis and y-axis error graphs with + 45 degree rotation. The error value around zero degree in the Fig. 11 is increased because of the effect of the sunlight reflection in the optical system and CIS alignment. Because present anti- reflection techniques are imperfect, it is very difficult to align the CIS to the horizontal and vertical axes. Also the plane of the CIS surface is not uniform. But we did not compensate the errors by using the measurement algorithm.
The incident characteristics of sunlight for the FDSS have been analyzed. After considering the results of the analysis and simulation, we designed, manufactured, tested, and calibrated the FDSS successfully.
The feasibility of the developed FDSS was verified by now. But the errors, which are affected by factors such as temperature, power characteristics and the Fixed Pattern Noise (FPN) of the CIS, and real measurement algorithm, were considered.
Especially, error compensations according to a certain range of angles were considered. Also the performance test of FDSS needs to be verified by an orbit test of the STSAT-2. On orbit the test can be tested by the star sensor which has with the accuracy less than 0.016degree.
Unfortunately, the performance mission of this FDSS could not be tested in orbit because of the two times launch failures of KSLV-1 (Korea Space Launch Vehicle-I).