To manufacture a real time digital holographic display system capable of being applied to next-generation television, it is important to rapidly generate a digital hologram. In this paper, we analyze digital hologram rendering based on a computer computation scheme. We analyze previous recursive methods to identify regularity between the depth-map image and the digital hologram.
Active studies on holography, which is the ideal and final goal of 3-dimensional (3D) image display, have been undertaken mainly in the US, Europe, and Japan. In particular, real-time holographic video is the core technology for the next-generation 3D television (TV).
The computer-generated hologram (CGH) was proposed by Brown and Lohmann [1] in 1966. It obtains an interference pattern through an arithmetic operation on a personal computer (PC) by approximating optical signals. Thus, it is easy to obtain a digital hologram (DH) with this CGH method for real and virtual objects. The problem with this method is that it exhausts much calculation time. For example, to calculate a DH using the CGH method, approximately 900 seconds are required if a general PC is used to display a significant quantity of computation (3D object measuring approximately 1 × 1 × 1 cm in space). To resolve this problem, Yoshikawa [2] tried to increase the calculation speed by recursively adding only the distance difference between a source point on the 3D object and the digital hologram to be generated. In [3], another recursive technique was proposed where only the leftmost pixel of a row in a digital hologram is fully calculated and the remaining pixels of the row are recursively calculated such as by adding the pre-calculated values and the previously calculated results to the results for the first column pixel of the row.
The purpose of this paper is to analyze a CGH method for calculation speed to generate a digital hologram. We analyze previous recursive methods [3] to identify the regularity between the depth-map image and the digital hologram.
In section II, previous CGH methods are described. Section III contains analysis of the CGH method and then optimization of the CGH method. Our conclusions are given in section IV.
II. COMPUTER-GENERATED HOLOGRAM
>
A. Basic Theory of the DH and CGH
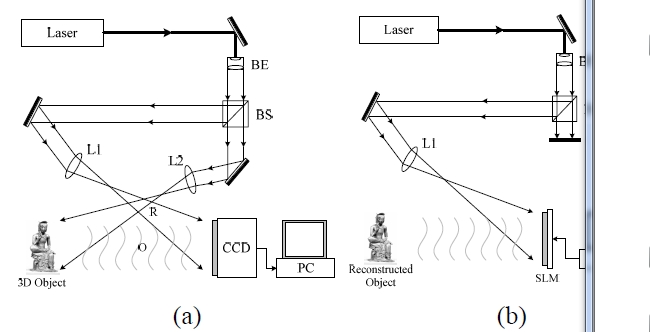
A system for digital holograms uses electronic equipment such as charge coupled device (CCD) cameras instead of optical ones to record the interference pattern of the holography and transmit it as a video signal. The image is reconstructed on the receiver side by illuminating a laser beam onto the received interference pattern uploaded on a spatial light modulator (SLM). Fig. 1 shows configurations of this system at the transmitter side (a) and the receiver side (b), which are the same configurations as the optical ones other than the CCD camera. That is, the recording system sends laser beams into the collimated wave using the condensing lens, and divides the wave into a reference wave and an object wave using a beam splitter. The object wave is illuminated onto the object while the reference wave is directly illuminated to the CCD camera. Then the two waves form an interference pattern and the CCD camera seizes this pattern. To reconstruct the hologram image, the interference pattern information is uploaded in the SLM to which a collimated wave is illuminated. Then the first diffraction beam is generated and the real image is reconstructed at the same position [4].
This section describes the previous CGH calculation method and the one using the recursive addition system.
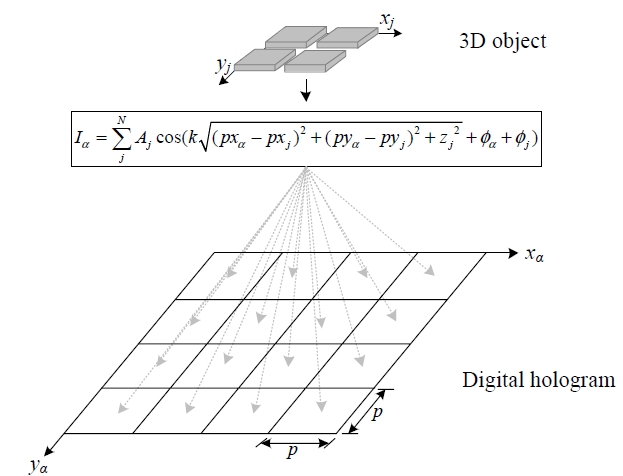
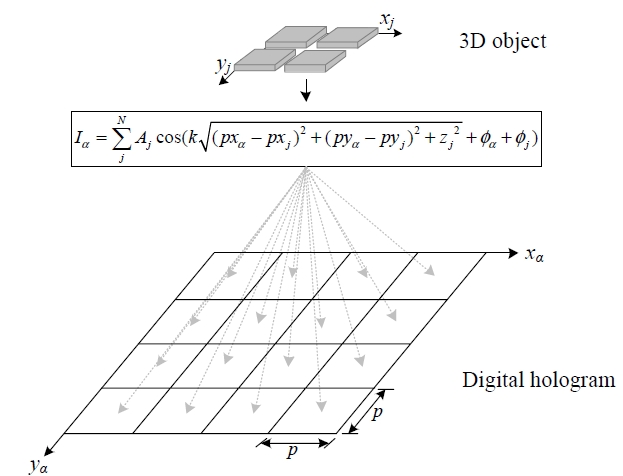
The CGH generating equation is defined as Eq. (1),

where
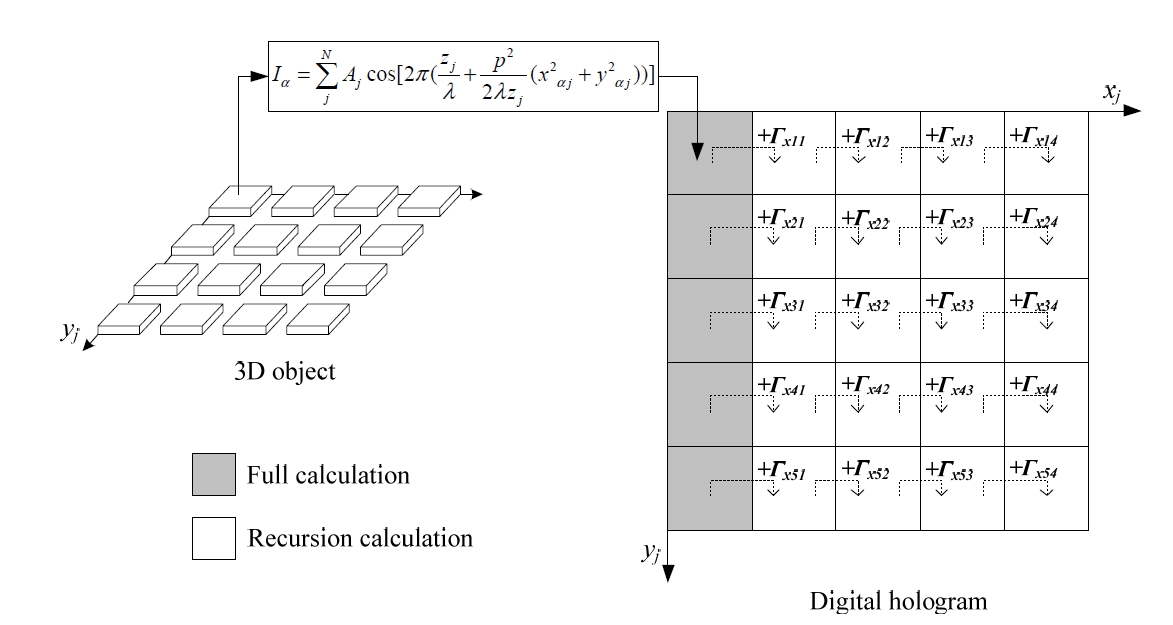
Fig. 2 shows a sample coordinate array system for the 3D object and the digital hologram to apply the CGH method, where the 3D object in 2 × 2, and the DH is captured as 4×4 in size. To generate a DH with this set-up, the calculation of Eq. (1) must be carried out 64 (= 2 × 2 × 4 × 4) times.
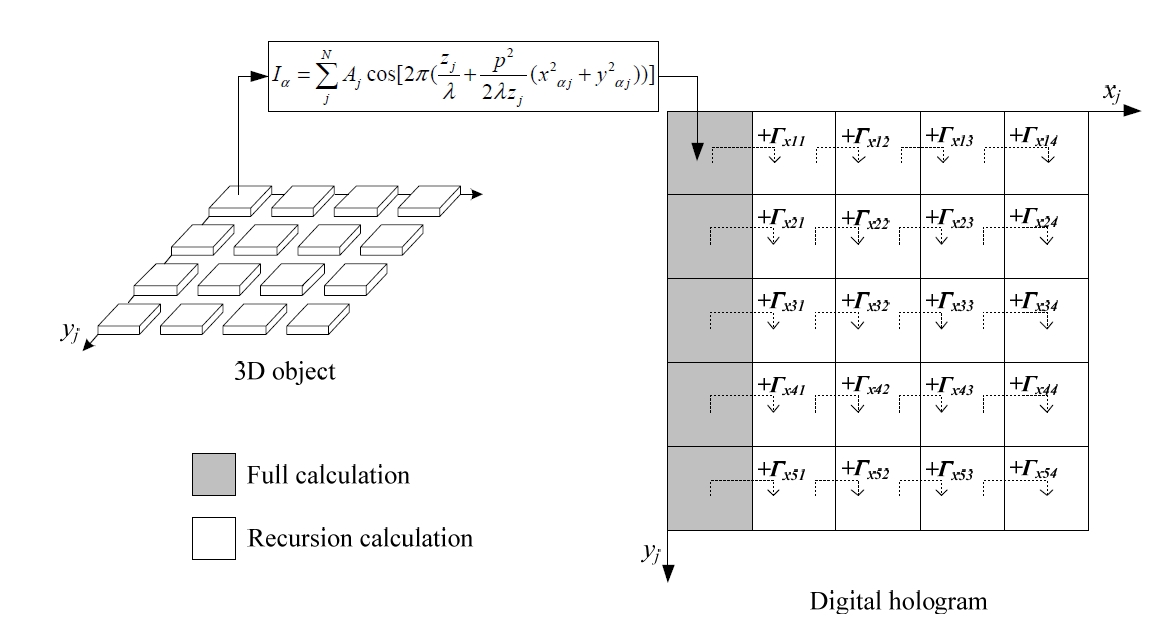
If Eq. (1) is approximated to the first term after the Taylor expansion, it would be as Eq. (2).
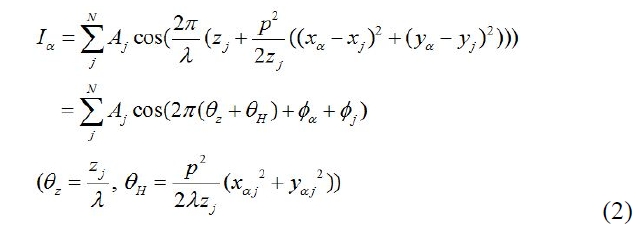
Here,
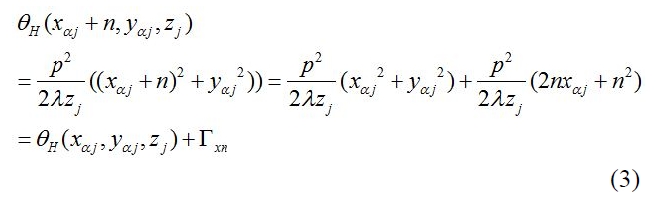
Here,

In the case of n = 1, that is

Meanwhile, in the case of n = 2,
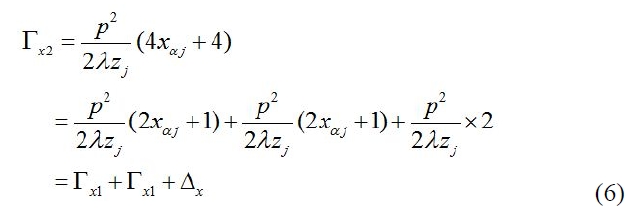
where

Again, when
When n = N,

From Eq. (9) it is clear that, once the first column (the leftmost pixel) of a row of a digital hologram (
At this time, we name the CGH calculation in Eq. (2)
III. ANALYSIS OF CGH ALGORITHM
As discussed in section II-A, the previous CGH method is a more advanced calculation method compared with the conventional method that carries out the full calculation to a level on a par with the quantity of all points of the 3D object, and the quantity of the coordinates of the hologram.
If the original equation is substituted for

Eq. (11) implies that when one point of the 3D object is calculated from the first x-axis (x-axis beginning with the (0,0) coordinate) of the hologram, the variable that changes the value after
The application of the previous method can be expanded to a case where the CGH calculation is carried out on the points that exist on the same column of the 3D object as shown in Fig 4. However, the pre-calculated
In the case of N = 1,

In the case of N = 2,
In the case of N = 3,
And

As shown in Eqs. (9) and (14), the
Applying the x-axis recursive operation method of the previous method explained in section II-B to the y-axis direction of the DH can be summarized as follows.
The phase
Here,

In the case of n = 1,

and, in the case of n = 2,
Here,
Again, when

When Eqs. (9) and (21) are compared, they are apparently identical. That is, the recursive CGH calculation method in the direction of the x-axis proposed in [3] can be expanded and applied to the y-axis direction.
To find regularities between the points located on the same column of the 3D object, the actual values were applied to Eq. (21) to calculate

Eq. (22) indicates that when the recursive CGH calculation in the direction of the y-axis is carried out on the points located in the same column of the 3D object, the values calculated based on Eq. (22) are recursively added to the value calculated from the first coordinate ((0,0)) of the hologram. That is, the
In this paper, we analyzed a CGH method for calculation speed to generate a digital hologram. We analyzed the previous recursive method [3] to identify the regularity between the depth-map image and the digital hologram.
It is expected that the analyzed CGH algorithm covering the whole coordinate array of the hologram proposed in this paper will be a core fundamental technology of the holographic 3DTV system for next-generation TV.