Satellite formation is the technology to perform the mission that cannot be performed by a single satellite or can be performed only by an extra-large satellite by forming a group of satellites, maintaining or altering the formation flying on the earth’s orbit or in space. Operation of a satellite formation allows to carry out various space missions such as mapping of the earth and constituting of an interferometer in space or other scientific missions that require more detailed and vast observation data. Additionally, selective operation of the satellites improves the mission performance and increases the extensibility and flexibility, and also the cost of development is saved as a number of small satellites are produced.
Gravity Recovery and Climate Experiment (GRACE) A and B satellites that are currently in satellite formation action were launched on March 17, 2002, to perform the mission of measuring the variation of the earth’s gravitational field precisely. The relative distance between the satellites in formation is measured in the resolution of 10 ㎛ using K/Ka-band ranging system (KBR) that is a dual one-way ranging instrument (Kim 2006, Yang et al.2006, Delong et al. 2009). Additionally, TerraSAR-X satellite launched on June 15, 2007 for the all-weather radar imaging using synthetic aperture radar (SAR) is in the satellite formation with the following twin satellite TerraSAR-X add-on for digital elevation measurements(TanDEM-X) launched on June 21, 2010. The two satellites in formation require 2-4 mm of baseline accuracy to produce a commercial high-resolution digital elevation model (DEM) (Moreira et al. 2004, Krieger et al. 2009). carMoreover, Prototype Research Instruments and Space Mission Technology Advancement (PRISMA) satellite was launched on June 15, 2010 to verify the induction/ navigation/ control/ sensor technology of formation flying in actual space for the future satellite projects planned for the missions that need formation flying. The focus of satellite navigation system design is to meet the resolution requirements of 2 m and 0.1 m for the real-time determination of the absolute orbit and the relative orbit, respectively (D'Amico et al. 2006, Persson et al. 2006, Gill et al. 2007).
Since the relative position information among the satellites in their formation is necessary for the satellite formation flying, many studies have been performed on the post-processing and real-time precise baseline determination (PBD) using global positioning system (GPS) (D'Amico & Montenbruck 2009). GRACE KBR biased ranging values are frequently used in validating precision in the PBD for formation flying. The relative distance obtained with the GPS measurements by the PBD of GRACE A and B is used to estimate the KBR biased range in order to validate the PBD results of the GRACE satellite in a batch processing (Kroes et al. 2005, Montenbruck et al. 2008, Delong et al. 2009). However, real-time validation of the PBD is impossible by the method because of the KBR bias estimation step, and the validating data (KBR biased range) and the data validated (GPS-baseline) are not independent upon each other because the PBD result is used in estimating the KBR bias. In this study, therefore, we suggest the validation method based on sequential processing in which the KBR bias is eliminated through the epoch difference method, not estimated, in order to enable real-time estimation of PBD by the independent validation factor.
In this study, we used the actual KBR biased ranging measurement, the raw GPS measurements, and the post-processed precise orbits among the Level 1B data provided by Jet Propulsion Laboratory (JPL) Physical Oceangraphy Distributed Active Archive Center (PODAAC) as the GRACE satellite data (Case et al. 2010). We explained the generation principle and modeling of the KBR biased ranging measurements used for the precision validation, and analyzed the KBR biased ranging measurements during one month of May, 2009. Additionally, the space-based precision baseline determination was performed using actual GPS measurements. The results were validated individually by the conventional batch processing and the newly proposed sequential processing validation method based on the KBR bias ranging measurements, and the precisions of the two methods were validated and compared.
The GRACE satellite is the joint product of National Aeronautics and Space Administration (NASA) and German Aerospace Center (DLR). The GRACE satellite A and B are operated around the circular orbit at the initial elevation of 500 km, separated by 220 ± 50 km from each other, based on the fact that distance between satellites is varied by the difference of the earth’s gravitational field and thus the temporal variation of the earth’s gravitational field can be estimated by measuring the distance. KBR is loaded on the GRACE satellites to measure the variation of the distance between the satellites in high precision. The Blackjack precise dual frequency GPS receiver developed by JPL is installed on the satellites for the measurement time and position of the observation data.
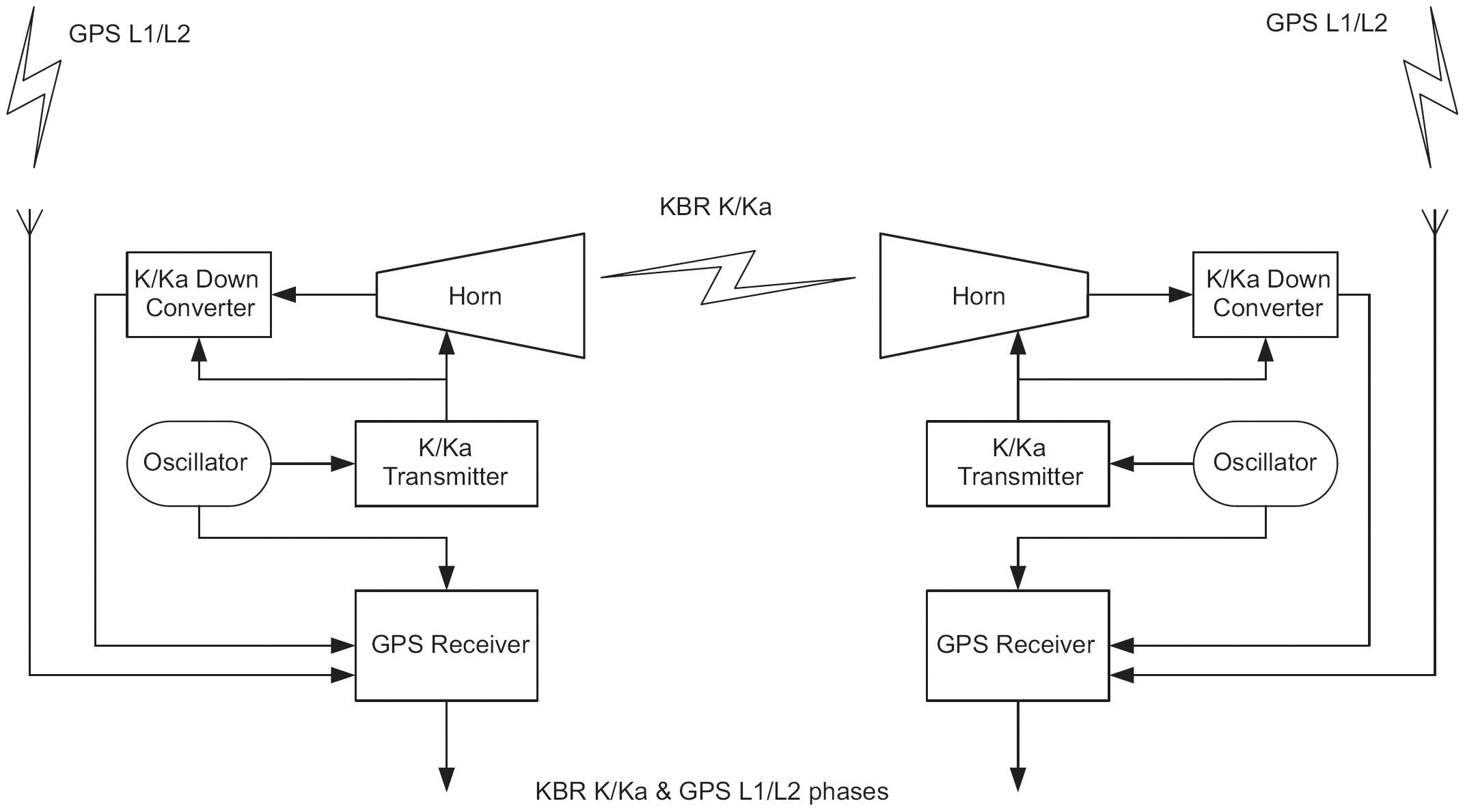
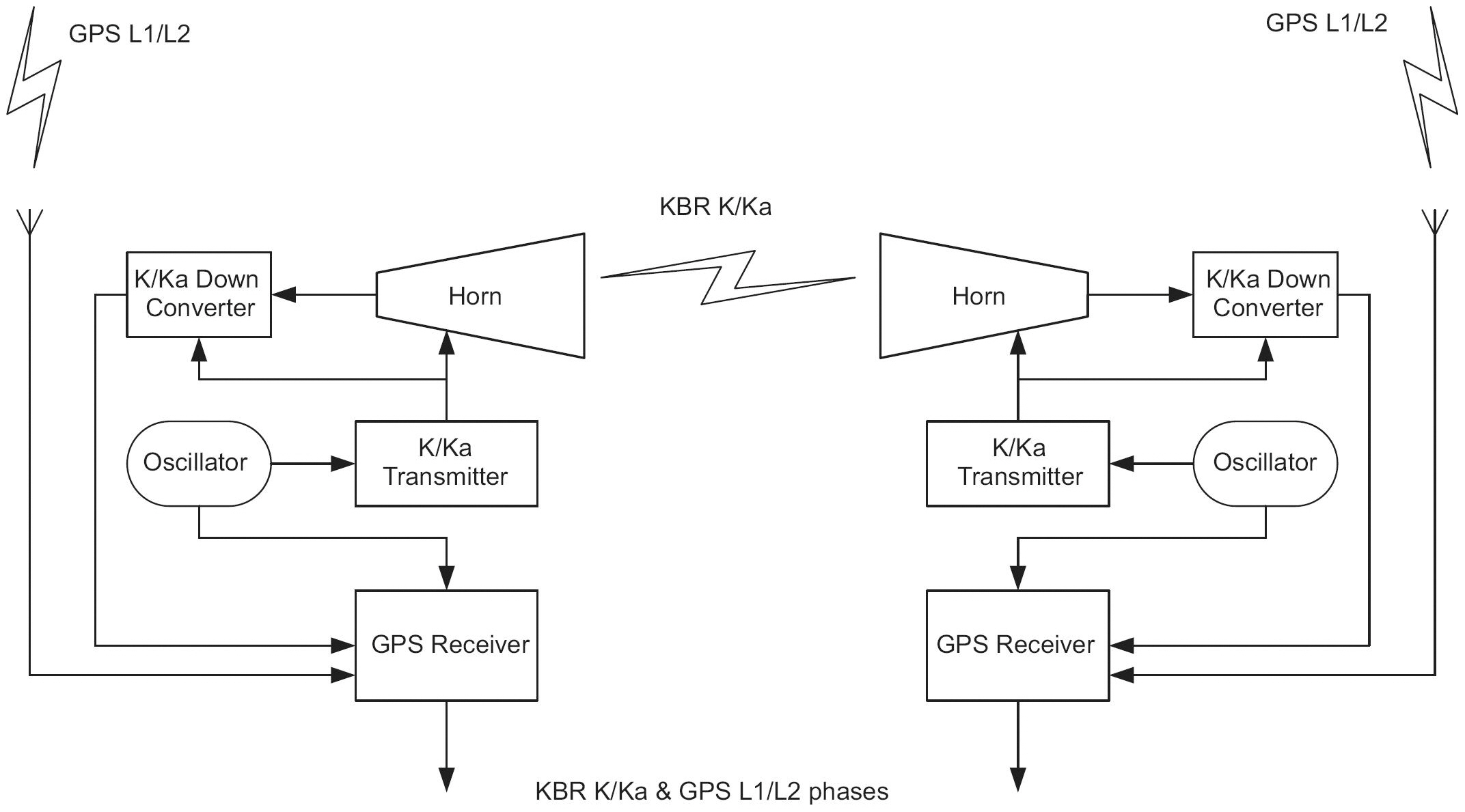
The GRACE KBR in Fig. 1 is the dual one-way microwave ranging system (DOWR) that transmits a carrier wave and receives the signal from the other satellite simultaneously using the dual frequency composed of K band (24 GHz) and Ka band (32 GHz). The KBR deals with both the carrier wave transmission and reception signals of K band and Ka band with one antenna, and these signals are generated by the ultra stable oscillator (USO) that is identical to the GPS receiver, although they pass through another multiplier.
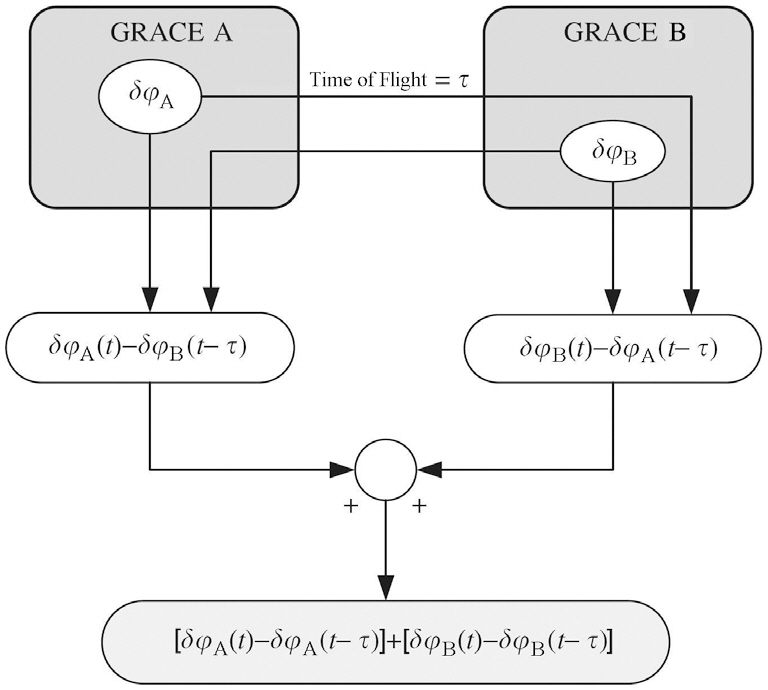
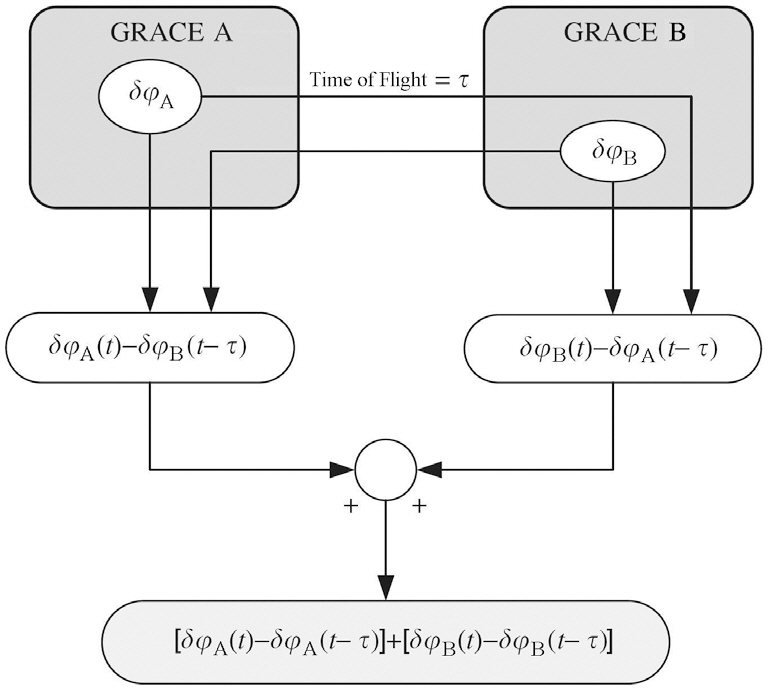
The precision of the microwave ranging method is directly related with the stability of the oscillator that generates the microwave signals, but DOWR is the system that can minimize the effect of the oscillator by combining the one-way ranging data from the two microwave ranging instruments. Fig. 2 is the basic concept of DOWR showing how the effect of the oscillator can be called out. The carrier wave phase signals received from the two ranging instruments can be modeled as in Eq. (1):

where
rier wave.
Addition of the one-way phase measurements of the two ranging instruments gives the dual one-way phase measurement,

The biased ranging values between the satellites measured by the KBR,

where
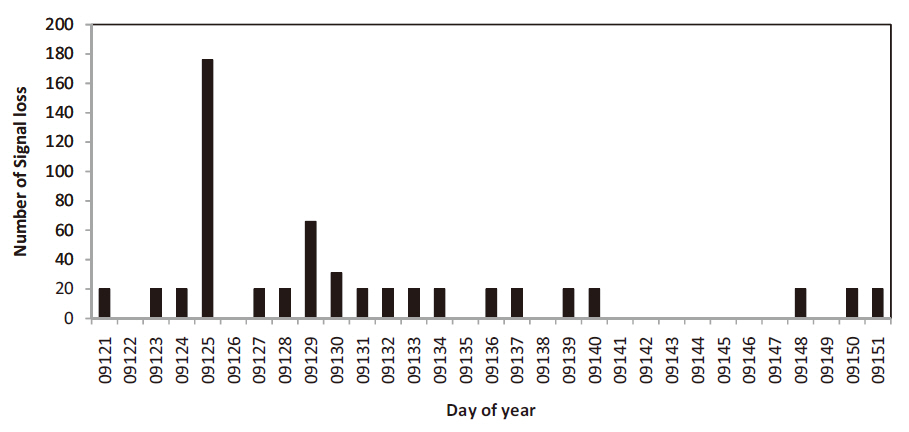
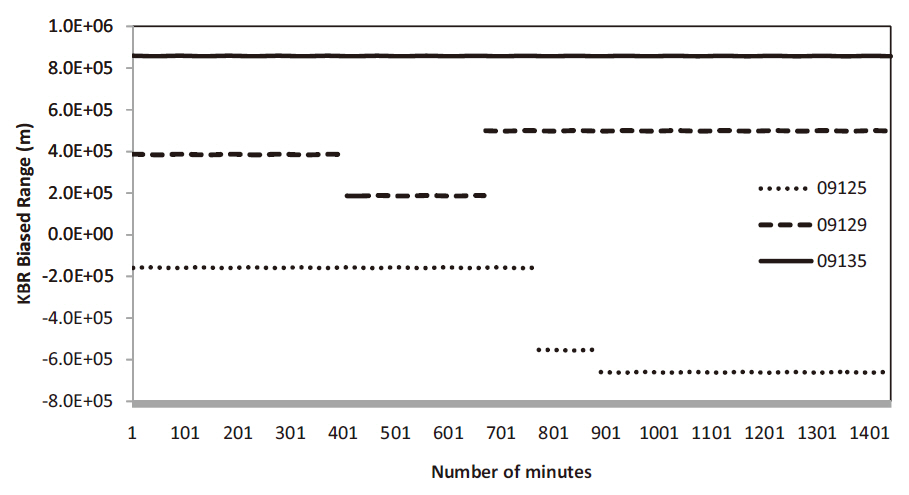
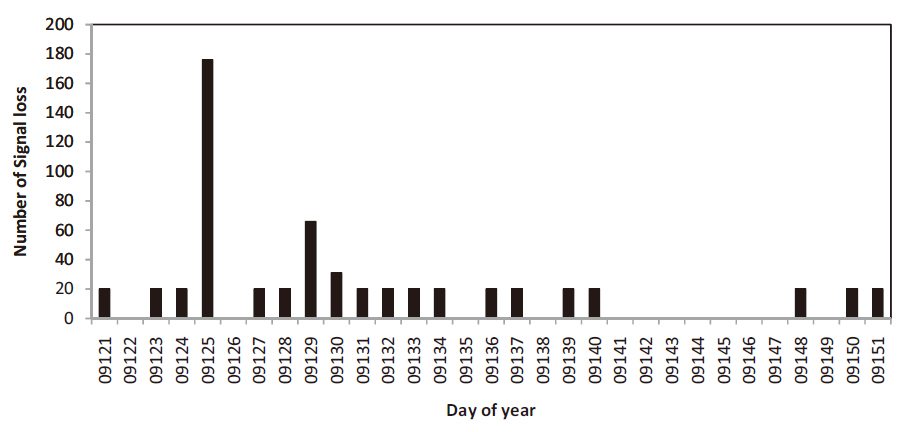
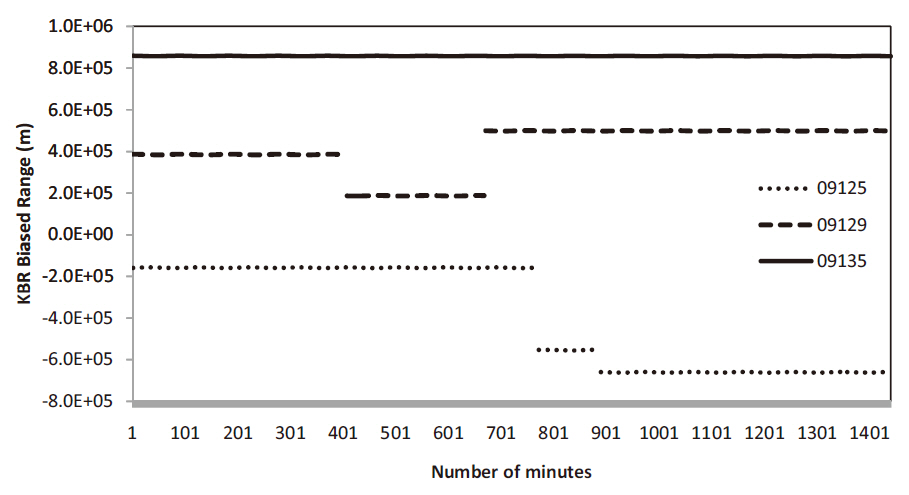
Fig. 3 shows the analytical results of the cycle slip and signal loss in the KBR biased ranging data measured everyday during one month in May, 2009. There was no signal loss for a total of 12 days because no cycle slip took place. In the case when cycle slip took place, about 20 data were lost per one time of cycle slip. However, three times of cycle slip took place in the two days, the day of year (DOY) 09125 and 09129, and a lot of data were lost. This may be because of the noise included in the carrier wave, low signal strength of the carrier wave, or low signal incidence angle, not because of the signal cutoff due to the surrounding terrain features that are the main causes on the ground. Fig. 4 shows the variation of the biased ranging data depending on the three times of cycle slip occurrences on the DOY 09125 and 09129. Although the number of arcs recognized in Fig. 4 is three on the both days, there are actually a total of four arcs on the both days including one arc in each day that is not recognized due to the several millimeters of little variation in the
biased ranging data. Hence, the maximum four biases should be estimated, while only one bias should be estimated when there was no data loss as in DOY 09135.
3. PRECISE BASELINE DETERMINATION
PBD is performed with the double difference of the GPS observation data, and it is divided into the ground-based method and the space-based method. In the ground-based method, the low earth orbit satellites require the GPS observation data from many ground stations distributed worldwide and their tracking to obtain the double difference observation data enough to rotate the earth’s orbit at a high speed. On the contrary, the precise baseline is determined in the space-based method by estimating the relative position between the satellites only with the double difference of the observation data from low earth orbit satellite. In our study, we performed the space-based PBD using only the GPS observation variadata from GRACE A and B.
For the GPS data processing in the PBD, we employed Bernese GPS Software 5.0 developed in Bern University (Dach et al. 2007). Bernese GPS Software was firstly developed by the Center for Orbit Determination in Europe (CODE), one of the International GNSS Service (IGS) analysis centers, for the GPS satellite data processing in double difference method, and it is still in operation. It is widely utilized because high accuracy can be achieved as it has been upgraded to be applicable to the orbit determination of low earth orbit satellites. Studies have been conducted on the baseline determination of GRACE satellites with Bernese GPS Software for the PBD between the satellites using the actual GRACE GPS measurements (Kroes 2006, Jaggi et al. 2007, Roh et al. 2009).
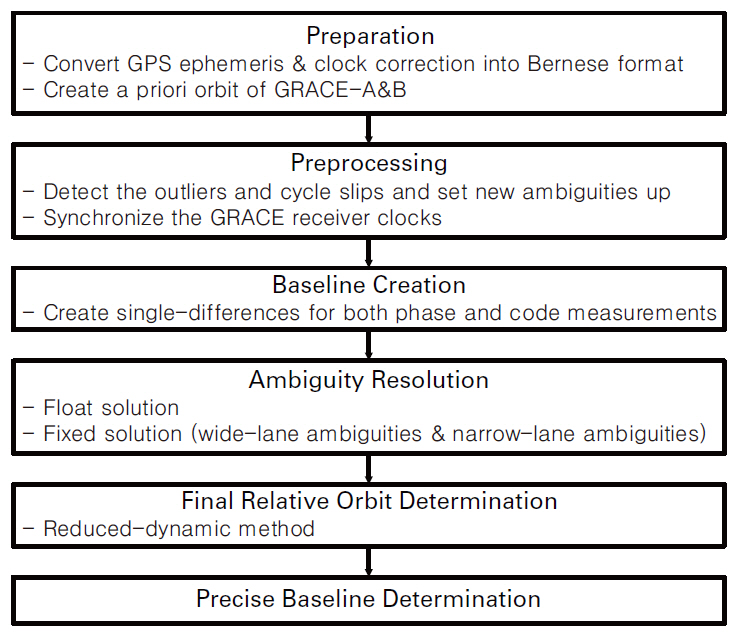
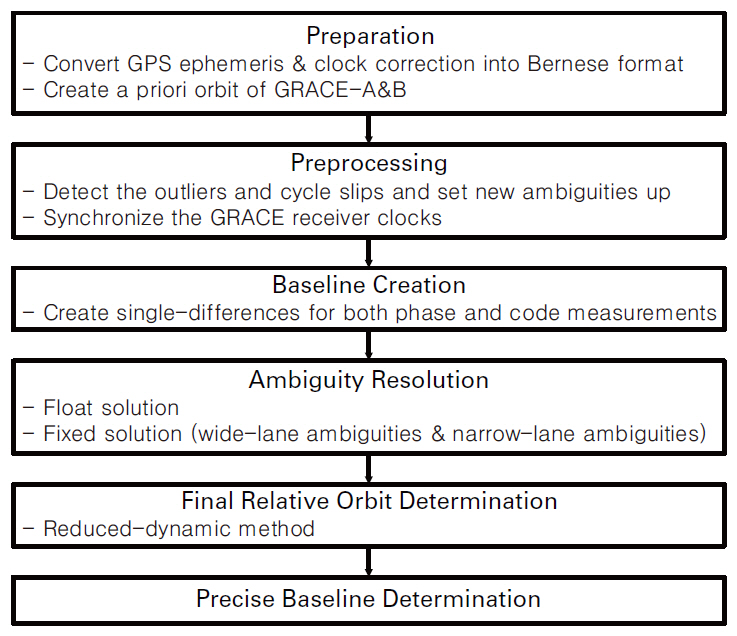
The PBD of GRACE satellite using Bernese GPS software is divided into three steps: the individual a priori orbit determination step of the two satellites, the relative position determination step, and the PBD step. The data processing in the PBD is conducted following the orders shown in Fig. 5. In the first preparative stage, the orbit and clock information of the GPS satellites is converted according to the Bernese software format, and a priori orbits of the GRACE A and B satellites are determined. In the second pre-processing stage, faulty data points and cycle slips are detected and the observation data of the GPS satellites and the GRACE satellites are clock synchronized. In the third stage, the baseline is generated by means of single difference of the code and phase measurements of the two GRACE satellites. In the fourth integer ambiguity resolution stage, which is the
most important stage in the PBD, the integer ambiguity of the phase single difference value are obtained as real number solutions. Then, the wide-lane integer ambiguity are determined through the Melbourne-Wubbern

4. METHODS AND RESULTS OF THE PRECISION VALIDATION
For the PBD of the GRACE A and B satellites, the actual GPS measurement values during one month of May, 2009 were used. To validate the precision of the PBD, we applied the batch processing and the sequential processing validation methods to the KBR bias ranging data with very excellent precision.
In the batch processing validation method, the bias BKBR value in Eq. (3) can be estimated by Eq. (6). There are 8640 epochs in 24 hours if 10-second interval GPS measurement values are used when there is no cycle slip (Kroes 2006).

In the case where there is a cycle slip in the KBR data, the number of epochs is set to n until that epoch and the bias is estimated using Eq. (6). The new biases can be repeatedly estimated after the cycle slip to the epoch of the next cycle slip. If there is no more cycle slip, the bias is estimated with the measurement values until the final epoch. If the
[Table1.] The estimated KBR biased range (m).
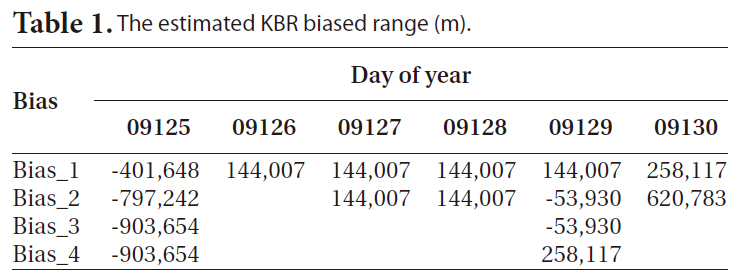
The estimated KBR biased range (m).
tion in Figs. 3and 4. Some of the data are not recognizable in meter scale because the variation was just a few millimeters.
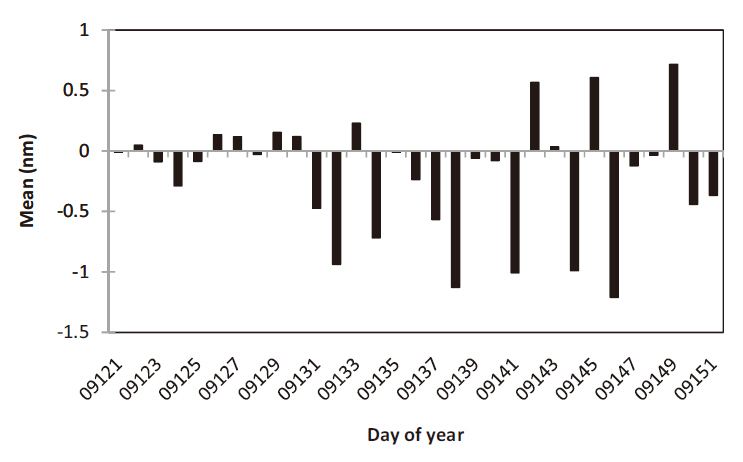
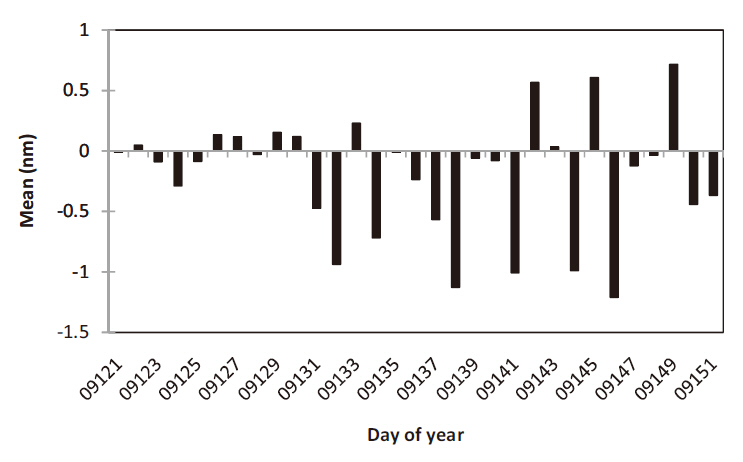
In the batch processing validation method, corrected KBR ranging values are obtained using the data in 24-hour unit as the KBR biased estimation values in Eq. (6), and the precision of the PBD can be validated on the basis of the residual (KBR-GPS) with the relative distance obtained by the PBD. The result was compared with that of the sequential processing validation method. As can be known in Fig. 6, the maximum daily mean of the KBR-GPS residual was 1.2 nm, and thus the residual can be considered as white noise of which average is zero.
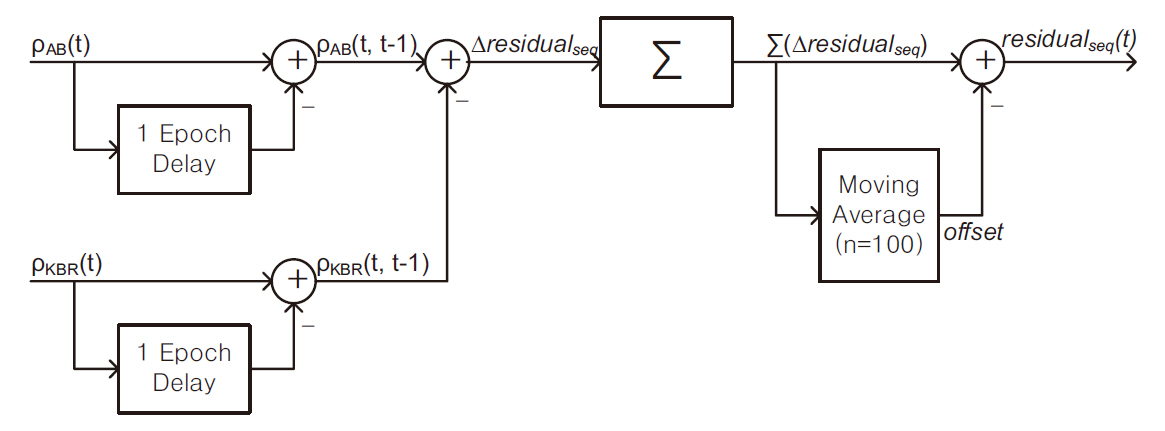
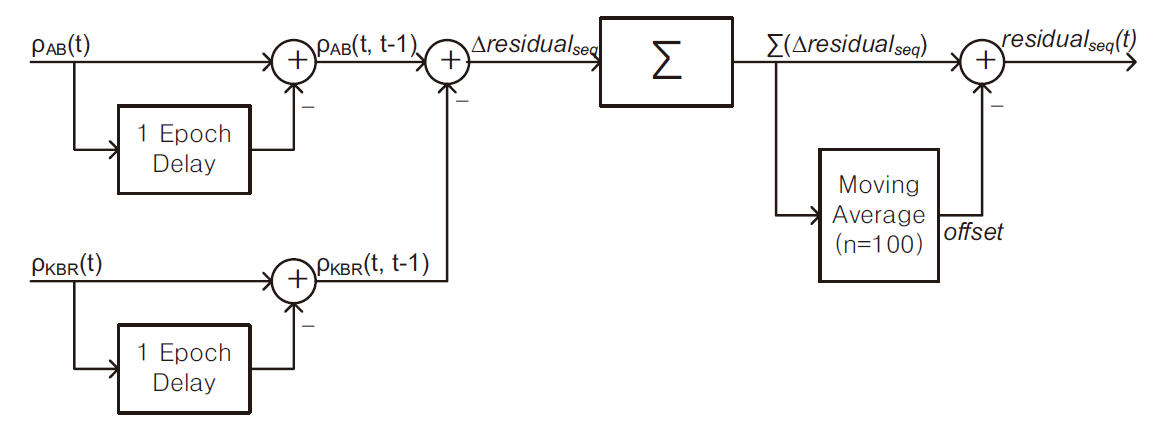
Fig. 7 schematically shows the sequential processing validation method that does not estimate the KBR bias that is not independent upon the data validated (GPS-baseline). By the respective epoch difference of the relative distances between GRACE A and B generated by the PBD and the KBR biased ranges, we can obtain


The offset that is generated when integrating the differences again should have zero residual average if the KBR-GPS residual is considered as white noise, as seen in the batch processing validation method. The result showed that the offset residual average was not zero, and thus moving average method was applied to obtain the average. The residual average was calculated by averaging 100 data intervals before the point to calculate the residual. When the residual epoch is moving sequentially, the interval for which the average is calculated is also moving together. The first residual should be zero because there is only one data to be averaged in the first residual calculation. The interval is not moved until the number of data is increased up to 100 sequentially. Since the offset is not clearly eliminated up to this point, the precision of the validation result is not reliable. However, it does not matter in processing continuous observation data.
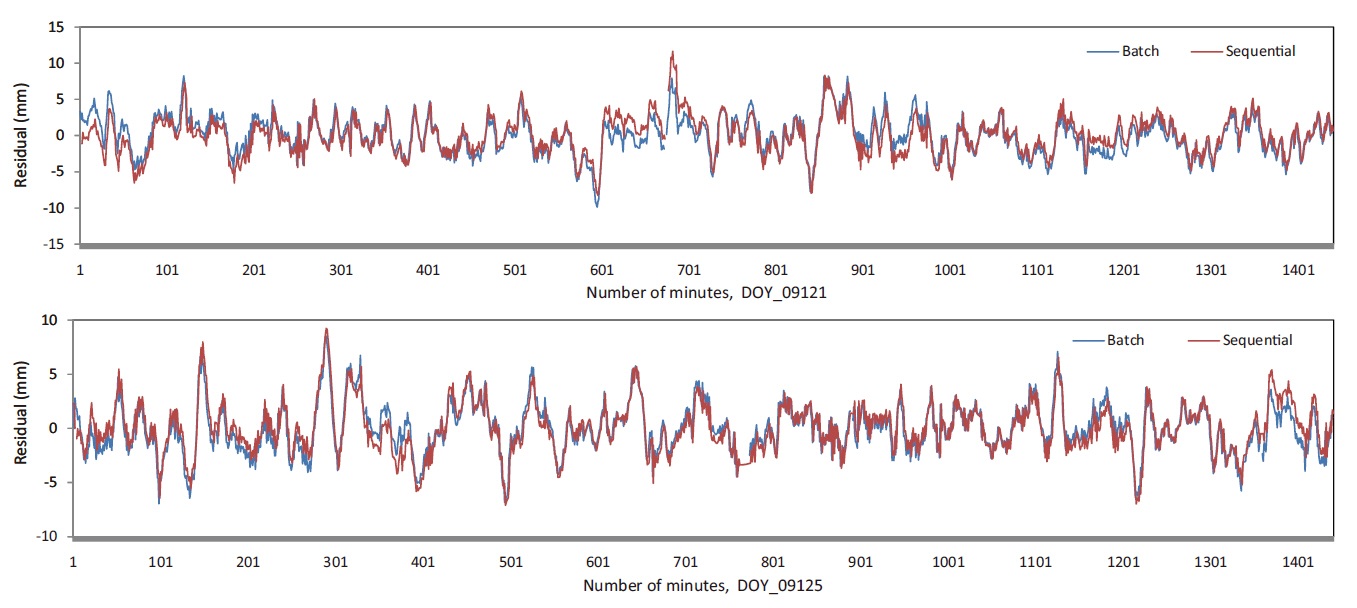
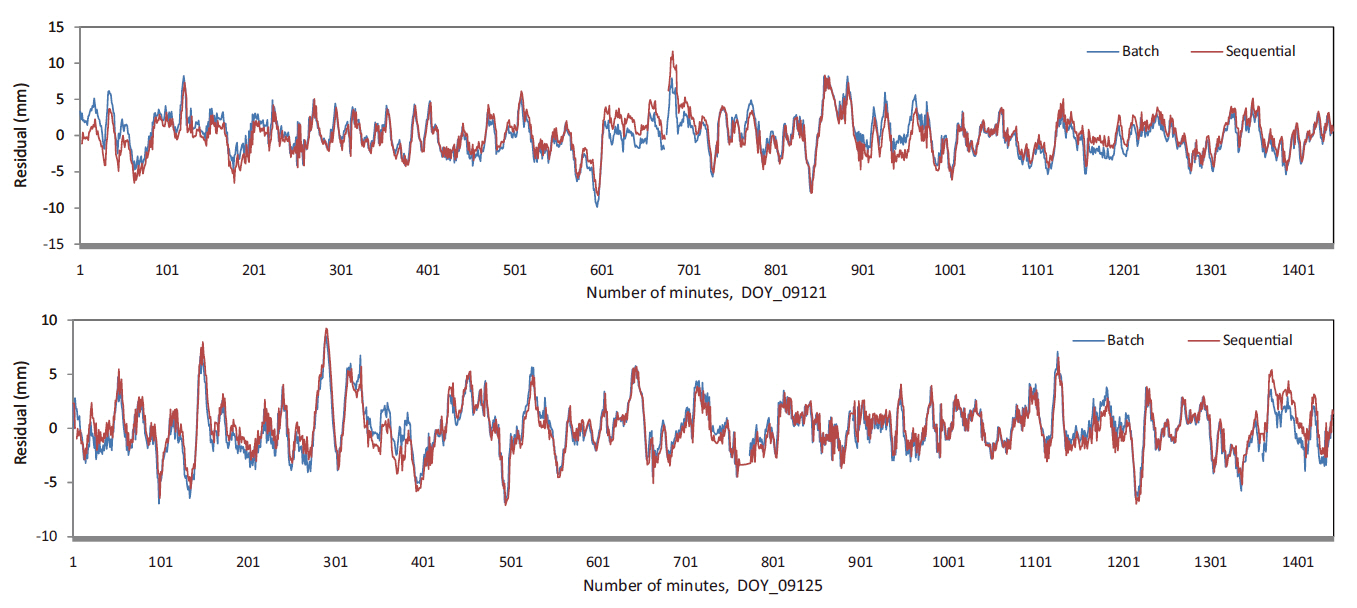
Fig. 8 compares the KBR-GPS residuals of DOY 09121 and 09125 obtained by the batch processing and the sequential processing. The data in one-minute interval was used for the residual calculation. In the case of DOY 09121, a little difference between the results of the batch processing and the sequential processing was found from the start to about 50 minutes due to the unclear offset elimination described before. However, since there was almost no difference in the two results afterwards, they have similar variation pattern except the temporary difference after the cycle slip points. In the case of DOY 09125, the two results showed the similar variation pattern from the start since the offset was little.
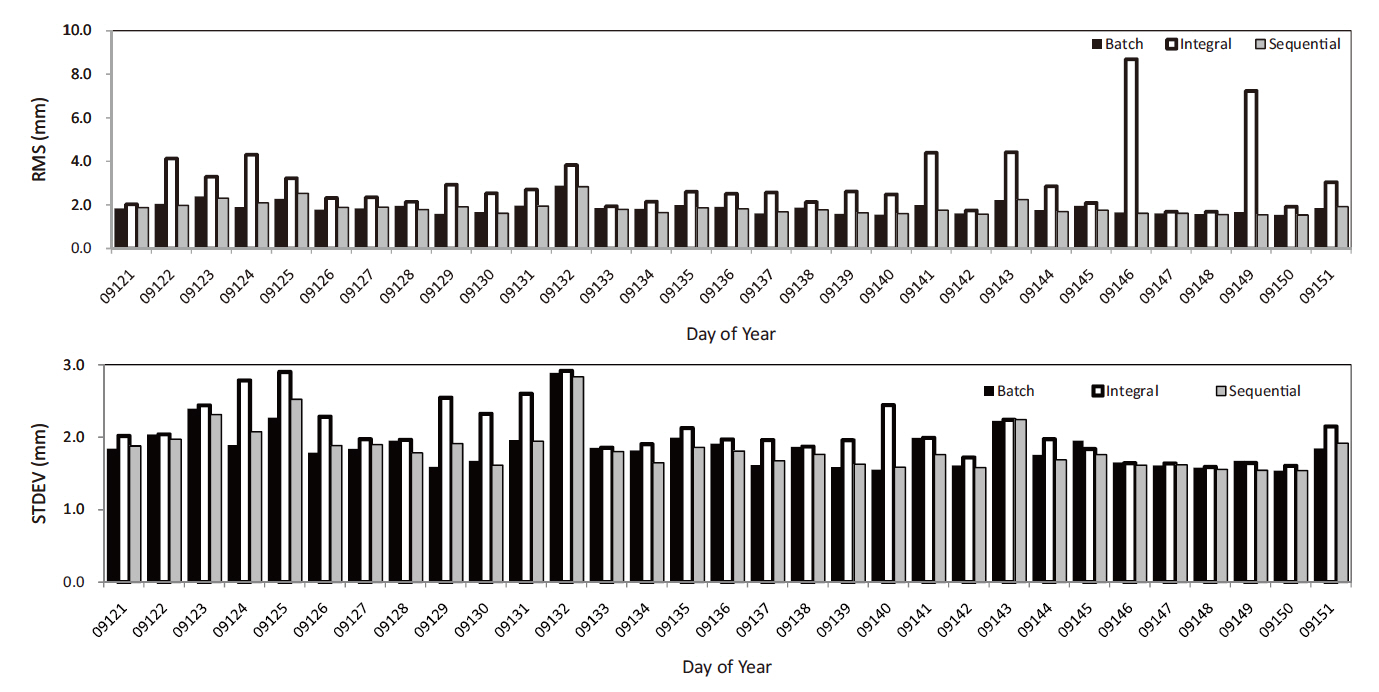
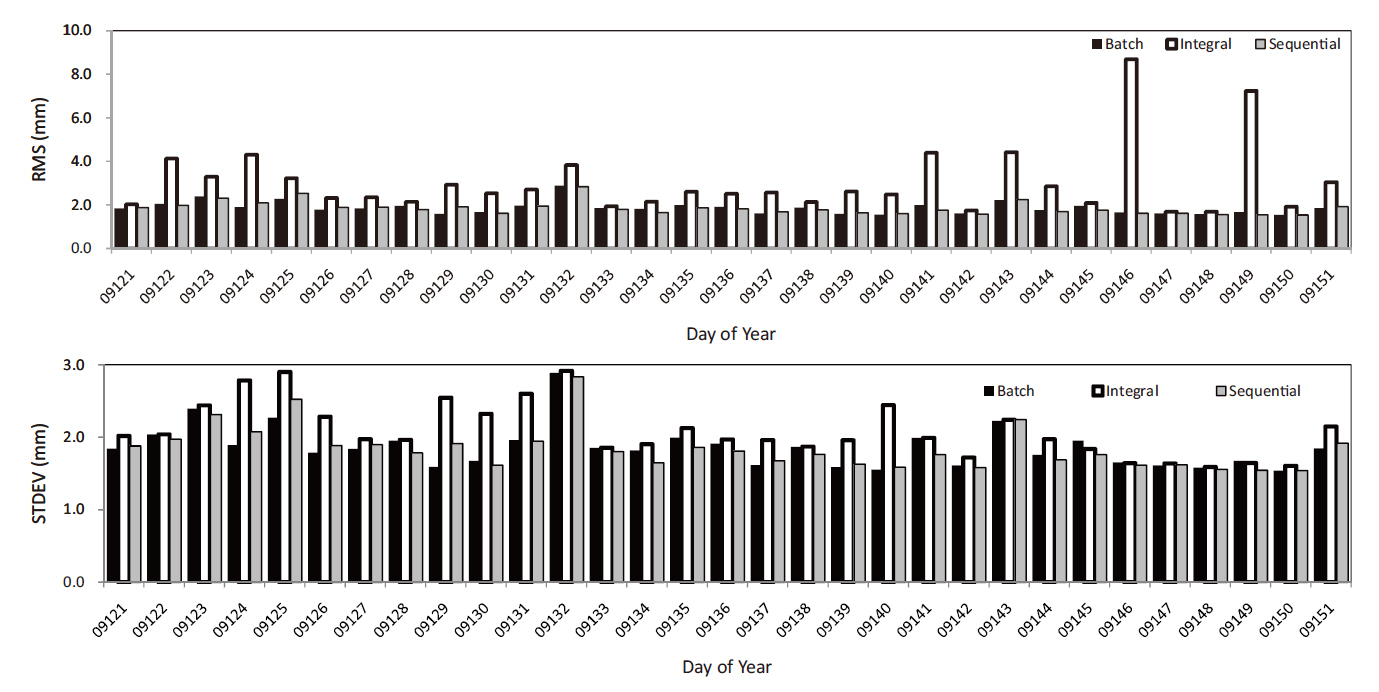
Fig. 9 shows the root mean square (RMS) and standard deviation of the KBR-GPS residual obtained by the batch processing validation method as well as the simple integral result and the sequential offset-free result of the sequential processing validation method in 24-hour unit during one month of May, 2009. In the sequential processing validation method, the simple integral result sometimes showed relatively large RMS due to the offset, while the sequential result showed the similar RMS value with that of the batch processing method as the offset was eliminated by means of the moving average method. In other words, the sequential processing validation method showed improved result when compared with
that of the intermediate, integral result, and the precision validation result was 1.5~3.0 mm that is similar to that of the batch processing method.
The PBD is required in satellite formation operation, and the precision needs to be validated in view of reliability. Thus, we performed PBD using the double difference values of the real raw GPS measurements of the GRACE satellites that are separated from each other by 220 km in average in the space at the 500 km altitude. The baseline between the GRACE A and B satellites obtained in this way was validated on the basis of the residual with the GRACE KBR biased range that has 10 ㎛ of precision.
In this article, we propose the sequential processing validation method by which the precision of PBD is validated by eliminating KBR bias through epoch difference, without KBR bias estimation, and integrating the difference residual again. The RMS and STDEV of the residual obtained in this method were in the range of 1.5~3.0 mm that is similar to that of the batch processing. Different from the batch processing validation method, the validating data (KBR biased range) and the data validated (GPS-baseline) are independent upon each other and the real-time processing is possible in this method, since the KBR bias is not estimated. Therefore, this method may be applied to the study of the real-time PBD algorithm of satellite formation flying, and the precision validation of the actual real-time PBD, too.