The power plant system of a tilt rotor unmanned aerial vehicle (UAV) was verified by the Ironbird ground test, which considerably reduces cost and risk during the developmental stages. The function and performance of the engine, drive line, nacelle conversion, and rotor systems were evaluated using a building block test approach. The Ironbird test concept facilitates the discovery of potential faults in earlier stages of the testing period. As a result, the developmental testing period could effectively be shortened. The measured test data acquired through a ground control and data acquisition system exhibited satisfactory results which meet the developmental specifications of a tilt rotor UAV.
The tilt rotor has recently appeared in the forefront of vertical take-off and landing (VTOL) aircraft design within the aerospace industry. Its application to high speed VTOL vehicles has been explored in both military and civil sectors. Tilt rotor vehicles are capable of achieving greater flight speeds and superior endurance performance than conventional helicopters. However, several unexpected obstacles were encountered during the early stages of tilt rotor development. In spite these adversities, active research and development of the tilt rotor concept has still been able to progress. The commercial tilt rotor aircraft has been in the process of achieving an airworthiness certification.
A prominent trend within the aeronautical industry is the avid development of unmanned aerial vehicles (UAVs).UAVs may serve as replacements for manned aircraft in th e near future, especially for search or fight missions.Various configurations of UAVs have been utilized in many applications. One viable design is the tilt rotor UAV(Hirschberg, 2006; Hwang et al., 2006). The tilt rotor UAV possesses the advantages of both fixed wing aircraft and rotary aircraft. The tilt rotor UAV is able to take off and land vertically, as well as cruise at high speeds and with a satisfactory level of fuel efficiency comparable to fixed wing aircraft.
The power plant system is one of the most important components in the tilt rotor aircraft. Various ground tests are necessary in order to verify the design and manufacturing methods of the power plant system, engine, drive line, and rotor. The ground tests are conducted according to the level of the system. In other words, each component as well as its integrated configuration will be tested. Generally, ground tests carried out during the development stage are costly and time consuming. This is especially true unconventional air vehicles such as the tilt rotor UAV. Whirl tower and power train tests are examples of the ground tests needed during the developmental stage. Such tests are difficult to implement.However, to overcome the difficulties encountered during testing, the Ironbird concept was developed. The Ironbird ground test reduces cost and risk during the developmental stages of the tilt rotor UAV. This paper presents the building block test approach, test process, and test results for the tilt rotor UAV.
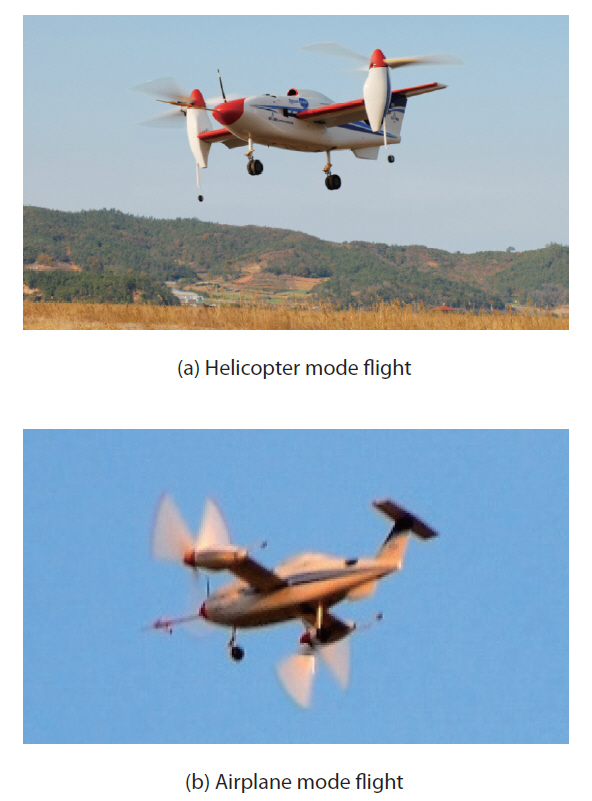
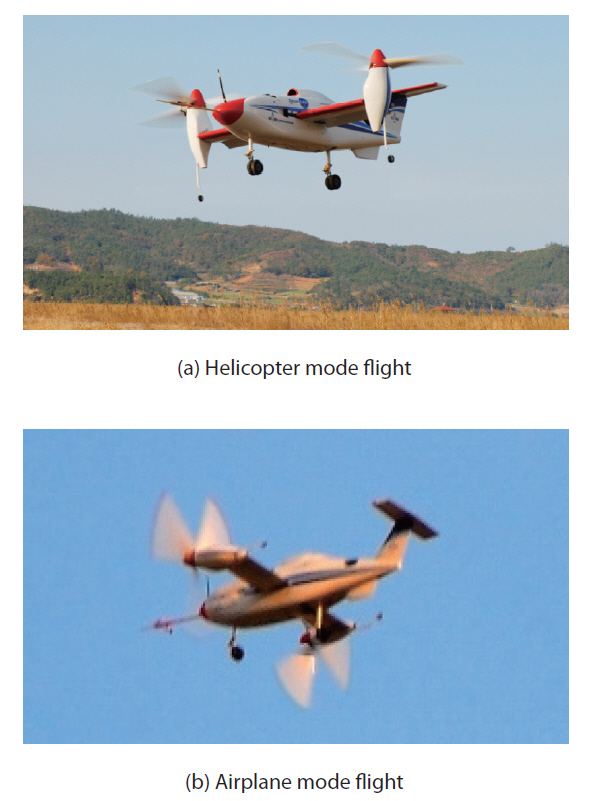
Figure 1 shows a smart UAV (SUAV) in flight, which Korea Aerospace Research Institute (KARI) had developed for a robust and intelligent tilt rotor UAV exhibiting high-speed cruise and vertical takeoff and landing capabilities since 2002. The maximum takeoff weight of the SUAV is 1,000 kg.
The maximum speed and the maneuver speed are 475 km/h and 400 km/hr, respectively. Highly reliable design and operating concepts were implemented in critical subsystems such as power train, flight control, and avionics systems. The SUAV can fly in three flight modes: helicopter, conversion,and airplane. After vertical takeoff in the helicopter mode,the rotor is tilted by a preprogrammed conversion flight envelope.
The power plant system of the SUAV can be divided into the engine, drive-line, nacelle conversion, and rotor systems.A turbo shaft engine by P&W X206 is located at the center fuselage and drives both rotors through the center and pylon gearboxes (PGBs). The drive-line includes gear boxes, drive shafts, cooling and lubrication systems. The super-finished gears were used in the gear boxes to enhance its performance and durability. A dry sump type was applied with oil jets for the lubrication of the gearboxes. Nacelle conversion actuators located at the wingtips drive the nacelles as well as the rotor system between the tilt angles of the helicopter and airplane modes. The SUAV has three bladed, gimbaled,stiff-in plane rotor system. The SUAV gimbaled hub is based on an automotive style mechanical constant velocity (CV)joint that uses large ball bearings driving deeply grooved hub elements, and a tension-torsion strap transferring CF force
of blade to hub. All of the actuators used in the rotor pitch controls and nacelle conversions are electric powered with redundancy.
A small scaled flight demonstrator was developed as a means to verify the flight control algorithm as well as the tilt rotor concept. It flew successfully in helicopter, transition, and airplane modes. The fully automatic flights including takeoff and landing were demonstrated with double channeled data link. Figure 1 shows the takeoff and cruise flights of the 40%small scaled demonstrator.
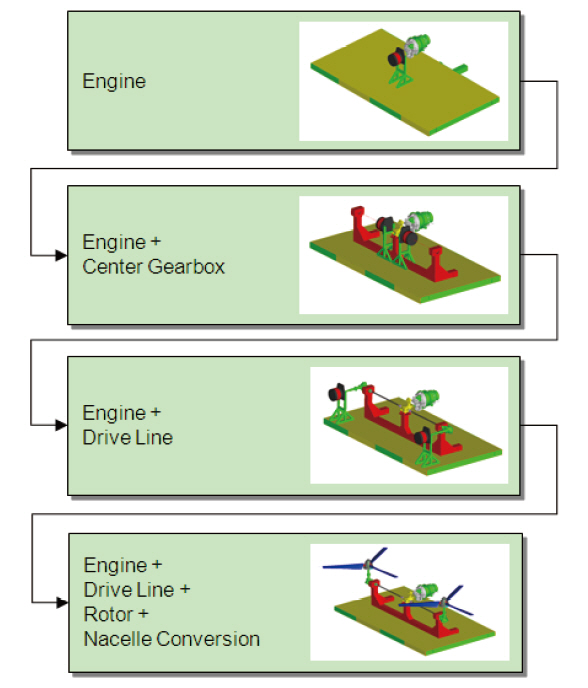
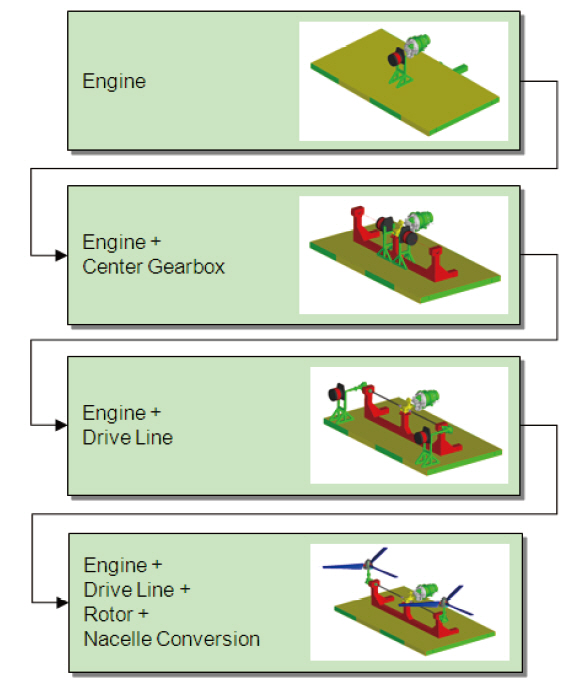
The Ironbird concept was created to save the time and cost incurred during the ground testing of the SUAV power plant system. The Ironbird concept is based on a building block approach. In other words, major components of the power plant system are tested by several sequential steps, as shown in Fig. 2. First, the engine system and the fuel system were verified using a water brake dynamometer. Then, the center gearbox (CGB) was verified using two dynamometers attached to the CGB output shafts. After the verification of these components, PGBs and wing drive shafts were verified using two dynamometers attached on the PGB output shafts.The lubrication and cooling systems were also verified in this step. In the final step, the rotor system was substituted in place of the dynamometer as the torque driver. Rotor blade pitches were controlled by electric actuators located on the swash plates. Nacelle conversion was simulated and
verified in this step. The building block approach features a sequential characteristic. This quality facilitates the early discovery of mistakes or problems, and resulting in cost and time savings during the developmental test period.
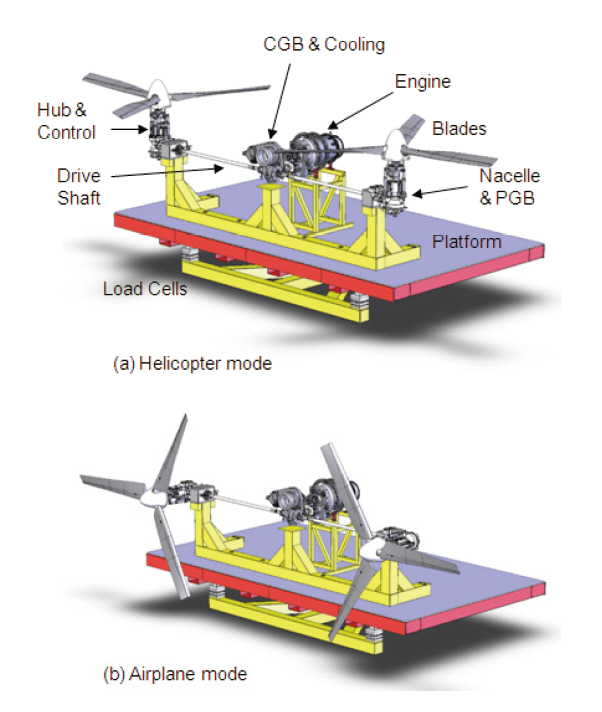
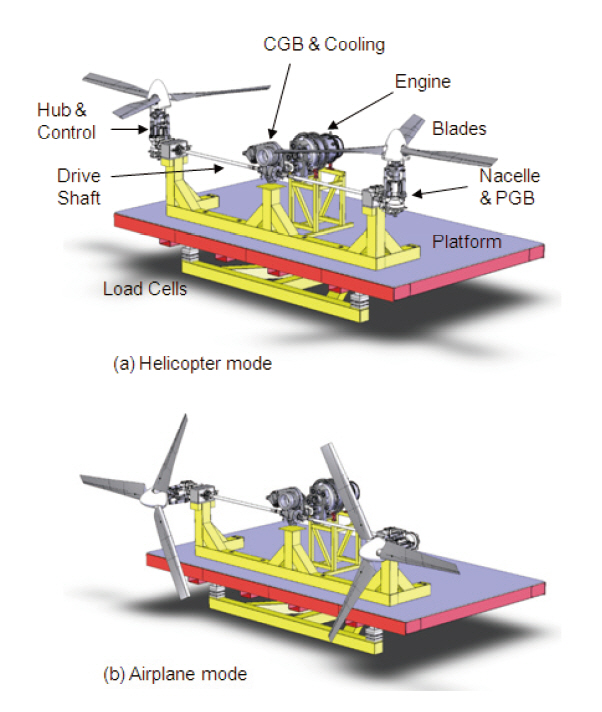
The baseline configuration of the Ironbird is a rigid and dynamically stable structure with a full aircraft span, as shown in Fig. 3. The Ironbird consists of a structural steel
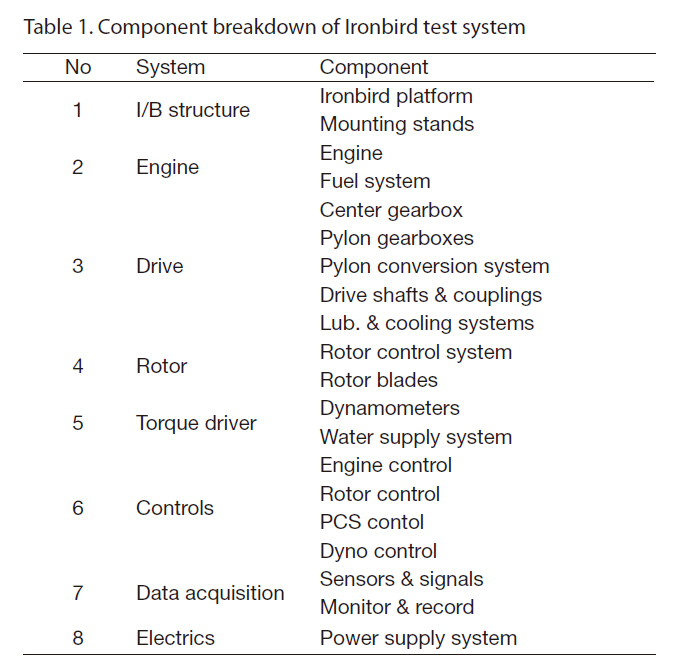
[Table 1.] Component breakdown of Ironbird test system
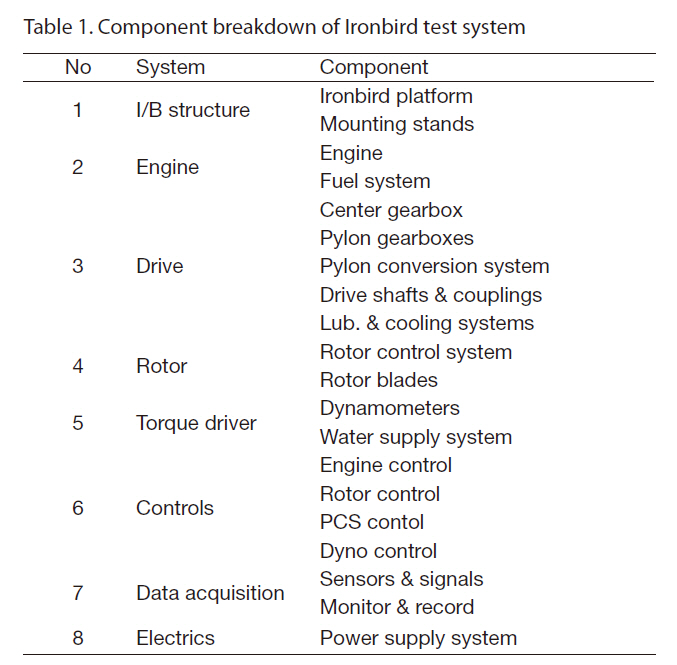
Component breakdown of Ironbird test system
frame mounted on a load measurement platform. The structural framework replicates basic mounting interfaces for the engine, gearboxes, and nacelle attachment of the actual tilt rotor UAV. The Ironbird consists of load cells and a graphical user interface capable of monitoring the full six-component airframe load, proprotor torque, and health monitoring sensors. It also controls the capabilities of the engine throttle, nacelle tilt angle, and blade pitches. Table 1 summarizes the major components of the Ironbird test system.
The Ironbird served as a test-bed for the developmental testing of the SUAV power plant system. In addition to saving time and cost as well as early detection of faults, the Ironbird also eliminates the need of a whirl tower facility, which has been regarded as a burden during the development of rotorcraft. Furthermore, it is capable of testing actual rotor hubs and controls with proprotors. Following the drive-
line and whirl testing, the Ironbird could be utilized as a platform for tie-down testing with a six-component balance capability.
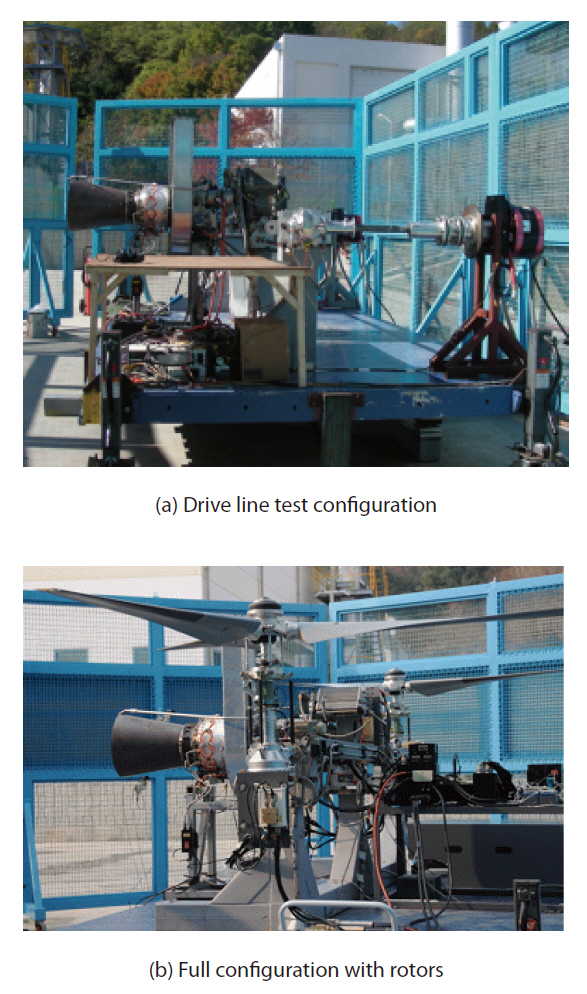
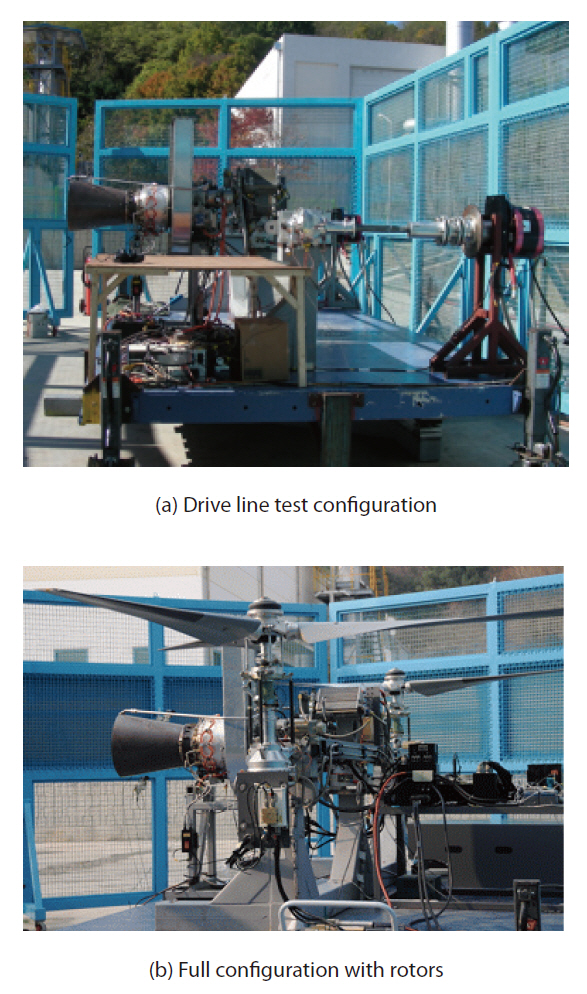
Figure 4 shows two configurations of torque drivers by dynamometer and rotor, respectively. Dynamometers were used as torque driver rather than of rotors during the engine and drive line tests, as shown in Fig. 2. Figure 4 illustrates the connection between dynamometers and the output shafts from the pylon gear boxes during the airplane mode, while proprotors are mounted on the pylon gear boxes during the helicopter mode. After the verification tests of the engine and drive line, the full configuration was established by adding the proprotor and nacelle conversion systems as shown in Fig. 4(a). This final configuration could tilt the rotor system to simulate all three flight modes of the tilt rotor. During the test, numerous data were measured by various sensors. The measured data included forces, torques,powers, temperatures, pressures, accelerations, speeds,displacements, chip status, etc.
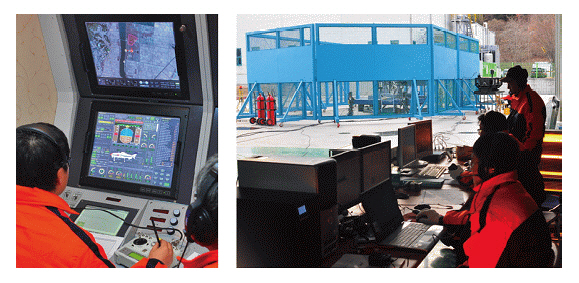
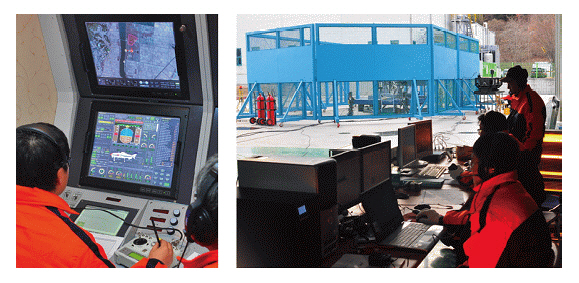
For the full configuration, the Ironbird was controlled by a ground control system (GCS) of the SUAV. The data were monitored in real time and recorded on a data acquisition system (DAQ). Figure 5 shows the CGS and DAQ for the SUAV Ironbird testing.
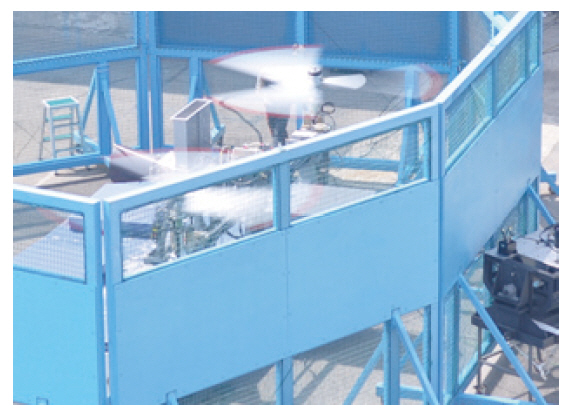
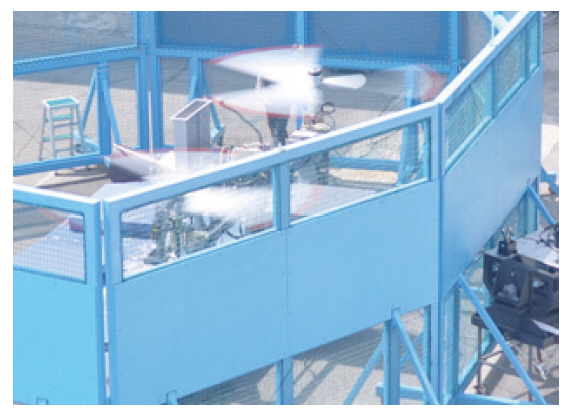
Figure 6 shows the testing of the fully configured Ironbird in helicopter mode. The maximum rotor speed and shaft horse power were 1,605 rpm and 560 hp, respectively. The SUAV has two different rotor speeds, 100% and 80% of the maximum rotor speed, in helicopter and airplane flight modes,respectively, in order to achieve optimum aerodynamic performance. After the transition from helicopter to airplane mode, the rotor speed reduced to 80% of the helicopter mode speed. Therefore, a relatively wide range of rotor speed and power should be investigated during the ground tests when compared to general rotorcraft. The conversion of rotating proprotors was successfully simulated on the Ironbird.
Both proprotors were synchronously moved by electric pylon conversion actuators on the wingtips. The measured response time from the control command and the output vibration level complied with the design requirements.
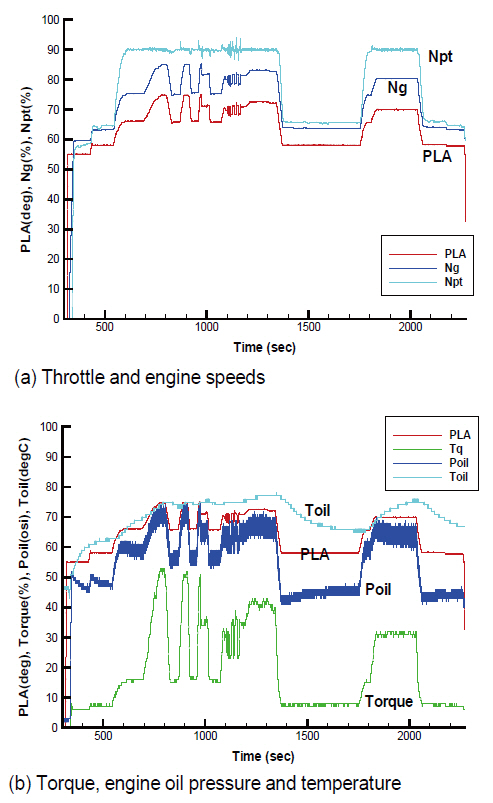
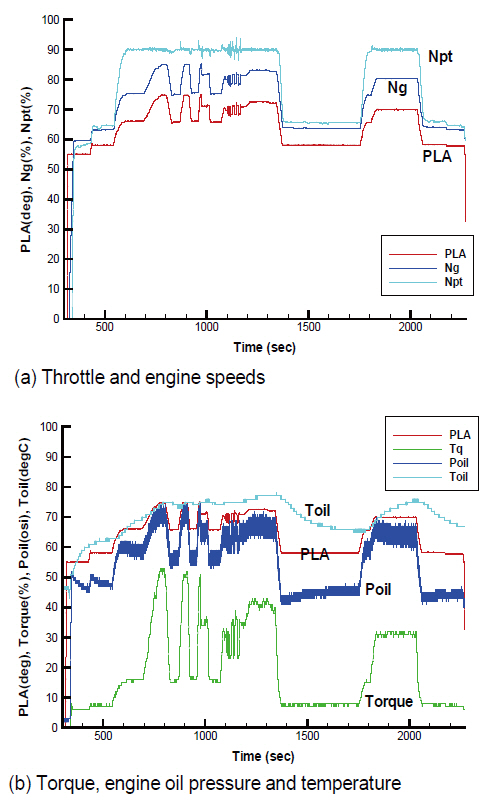
Figure 7 shows the measured characteristics of the SUAV engine when it was driven up to about 50% of maximum torque condition. A gas generator speed (Ng) of 58,000 rpm,and power turbine speed (Npt) of 39,807 rpm were defined as 100%. The speeds of 6,000 rpm and 1,605 rpm were defined as
100% of the engine output and rotor speeds, respectively. The fuel flow was controlled by power lever angle (PLA) on engine control, which was automatically determined by rotor pitch controls. An automatic rotor speed governor calculated the required PLA value to maintain the rotor speed at the specific flight condition by the pitch control command. During the test, the fuel flow was variously inputted by rotor pitch controls in order to observe the responding characteristics of the rotor speed governor. Figure 7(a) illustrates that the power turbine speed (Npt) is mechanically linked to the rotor speed, and exhibited sufficient steadiness except for some disturbances caused by excessively fast inputs provided by the rotor pitch control commands. The response of the gas generator speed was quick, which satisfied the design requirements. The maximum rotor speed was intentionally set to 90% in this run for safety precautions. Figure 7(b) shows the remaining characteristics of the engine. The measured oil pressure and temperature data were well distributed within allowable ranges of engine specification. The engine torque was rapidly varied by the PLA input change. A 394 lb-ft was defined as 100% of engine torque.
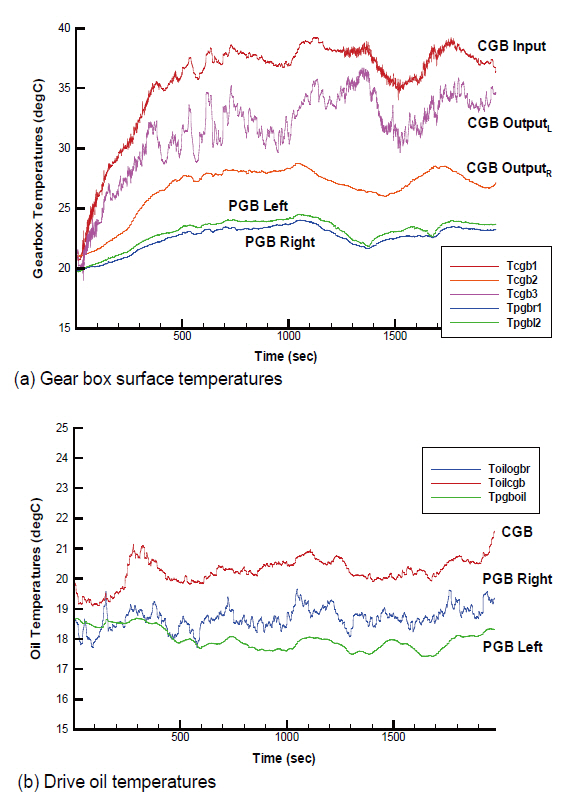
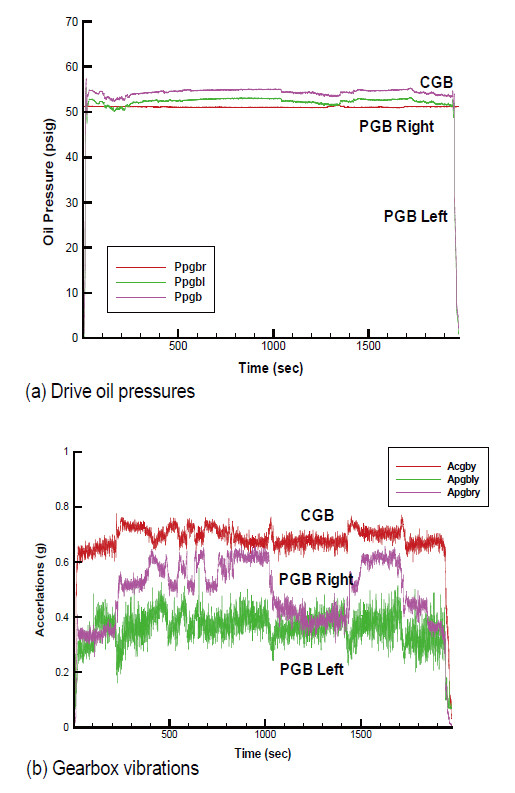
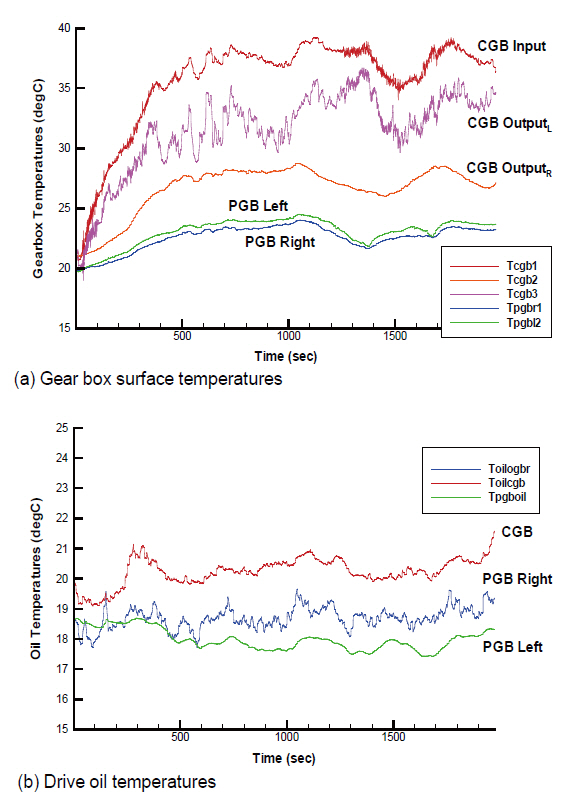
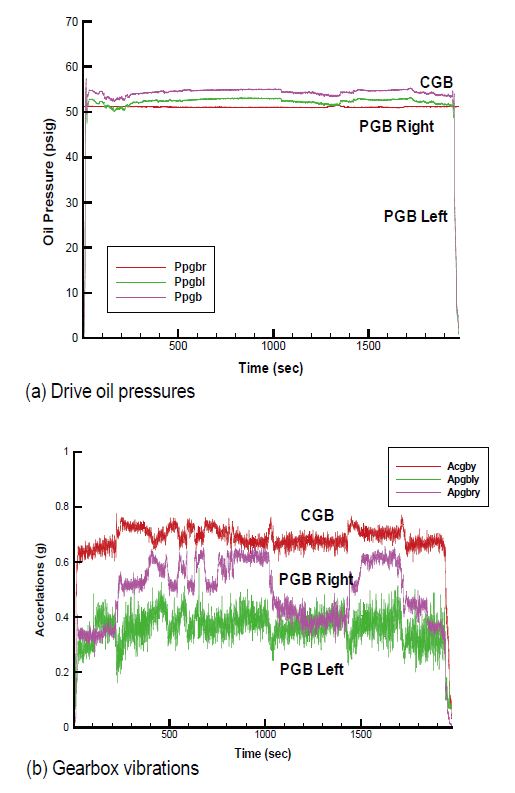
Fig. 8(a). The input bearing region of the CGB labeled as ‘CGB Input’ exhibited the highest temperature value, resulting from the high speeds encountered in a location past the engine.On the other hand, pylon gear boxes had moderate surface temperatures. The test results of the lubrication system for the drive line were satisfactory. The temperature levels of the lubrication oil met the design specification. Figure 8(b)shows that the oil temperature at the CGB was slightly higher than that of the pylon gear boxes. The maximum oil pressure was limited to 60 psig by an oil pressure manifold located right after the gerotor oil pump. Figure 9(a) shows that the oil pressures maintained steady values under the limit all through the testing period. Figure 9(b) shows vibration levels of three gear boxes during the test, which all the measured acceleration data were distributed under the design guideline of 1 g. The vibration increased as the engine started, and was maintained at a certain level when it arrived at the specific test condition. The CGB exhibited a high vibration level due to the direct influence from engine. It can also be seen from Fig. 9(b) that some peaks of vibration were generated from input command changes imparted by the proprotor pitch and engine throttle.
The Ironbird test approach is an efficient concept for the ground testing of rotary aircraft. This approach provides considerable time and cost savings incurred during the developmental stages of tilt rotor UAVs. The Ironbird test approach can substitute several major component tests such as whirl tests and power train tests. Additionally, it reduces developmental risks as it provides early detection of potential faults and problems encountered during the testing period. The functions and performance of the engine,drive line, nacelle conversion, and rotor systems of the SUAV were successfully evaluated by the Ironbird building block test approach. In conclusion, the Ironbird test concept was especially useful for tilt rotor unmanned air vehicle testing in regards to cost and efficiency.