Integral imaging is a technique capable of recording and reconstructing a 3D object with a 2D image array having different perspectives of a 3D object. It has been regarded as the most promising technique because of its full parallax, continuous viewing, and full-color images [1-4]. However, this technique suffers from some problems such as limited image resolution [5-7], narrow viewing angle, and small image depth.
To overcome the disadvantage of limited image resolution, many modified methods have been proposed [8-12]. A curved computational integral imaging reconstruction technique has been proposed in [11, 12], which is an outstanding method to enhance the resolution of three-dimensional object images. However, the utility of the virtual large-aperture lens may introduce some distortions because of the curving effect in this method.
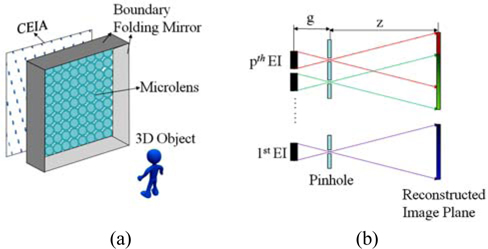
In this paper, to improve the resolution of the computationally reconstructed 3D images, we propose a novel approach for the resolution enhanced pickup process by using boundary folding mirrors. In the proposed method, 3D objects are picked up by a lenslet array with boundary folding mirrors as a combined elemental image array (CEIA), which can record more perspective information than the regular elemental image array (REIA) because of the specular reflection effect. The recorded CEIA is computationally synthesized into a REIA by using a ray tracing method. Finally, by using the REIA, the resolution-enhanced 3D images could be computationally reconstructed in the proposed method. To show the feasibility of the proposed method, preliminary experiments are performed.
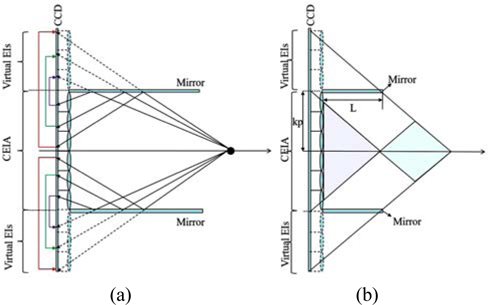
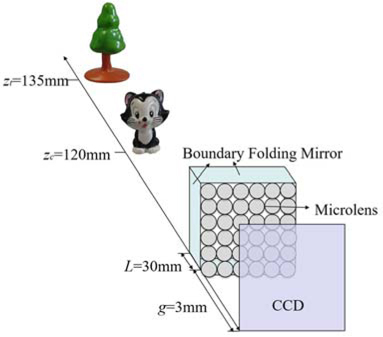
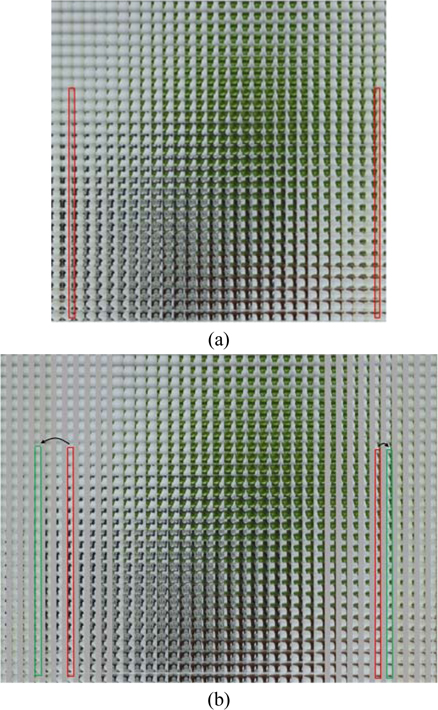
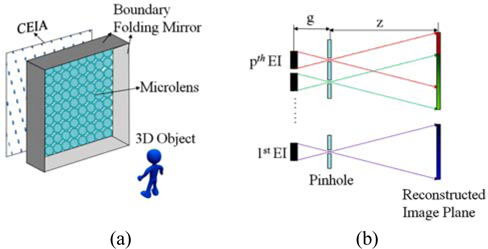
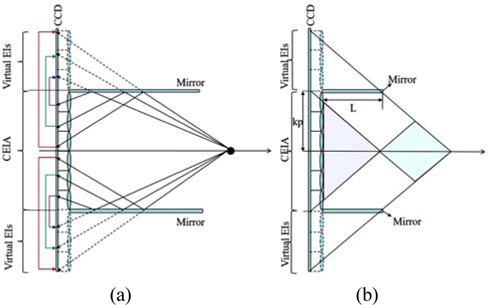
Figure 1(a) shows the pickup system which uses a lenslet array and boundary folding mirrors to capture 3D objects [13]. Compared with conventional integral imaging system, the pickup systems can record both direct light information from the 3D objects and reflected light information from the boundary folding mirrors. Here, it is worth noting that the reflected information of the CEIA contains extra perspective information from the 3D objects. In order to computationally reconstruct resolution enhanced 3D images, the CEIA is necessary to generate a REIA, especially the reflected information of the CEIA needs to reorganize virtual elemental images (EIs) as shown in Fig. 2 (a). The lenslet array denoted by dashed lines is a virtual lenslet array mirrored by boundary folding mirrors. The red, green and purple arrowed lines denote the mapping directions.
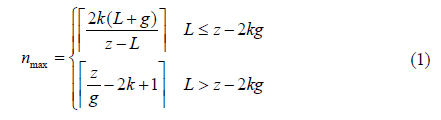
Before synthesizing the REIA, the maximum number of additional microlenses
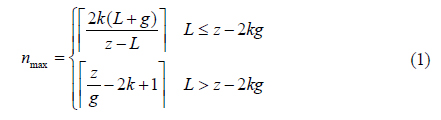
where

If the 3D objects are located in the purple area of Fig. 2(b), the reflected information cannot be recorded through the additional microlenses. If the 3D objects are located out of the green and purple areas of Fig. 2(b), some but not all of the additional microlenses can be exploited for recording reflected information
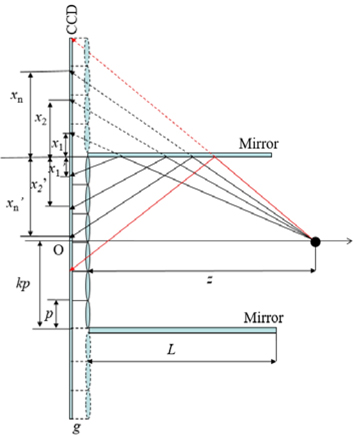
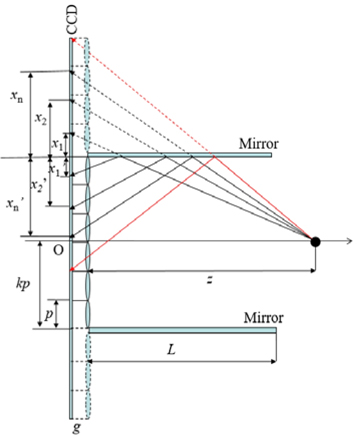
Next, we consider only the one dimensional case to simplify the mapping relationship between the reflected information of the CEIA and the virtual EIs. Suppose that an object point is located at a longitudinal distance z away from the lenslet array, and the gap between the sensor and the lenslet array is

Then, we can get the mapping relationship between the reflected information of the CEIA


where

By using the Eq. (4) and Eq. (6), the REIA
In the computational integral imaging reconstruction process, a high resolution 3D scene can be reconstructed based on the back-projection model. The 3D image reconstructed at (
where
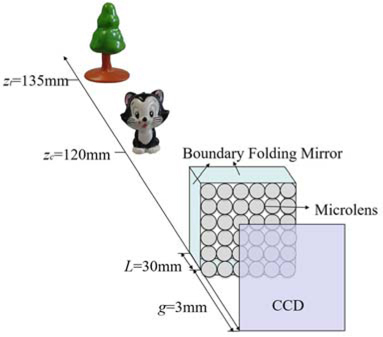
To demonstrate the feasibility of the proposed method, we performed some experiments with 3D objects composed of a
In the experimental setup, the gap between the imaging sensor and the lenslet array was set to 3 mm, which is equal to the focal length of the microlens. The 3D objects
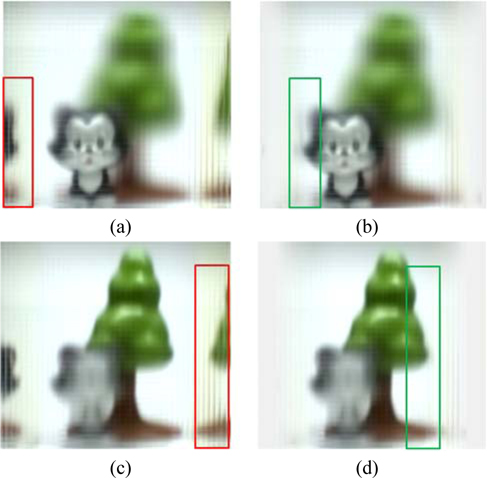
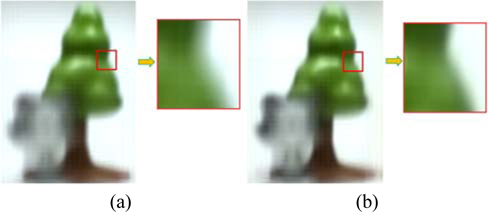
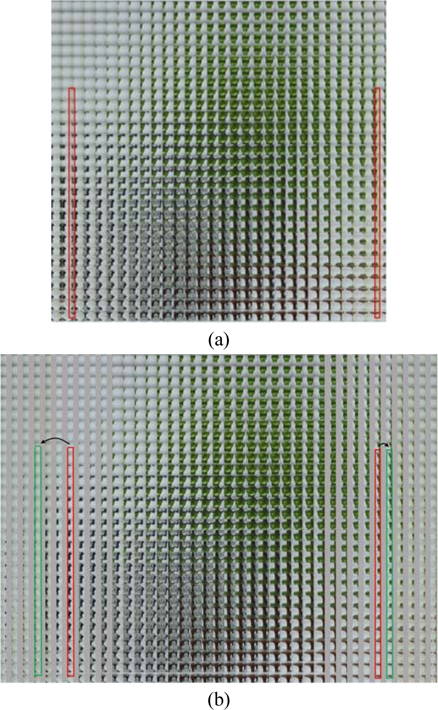
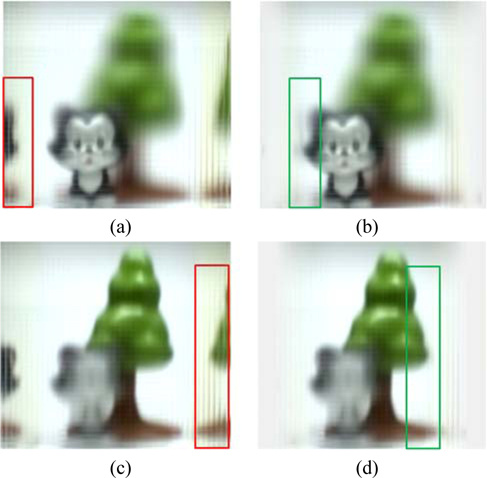
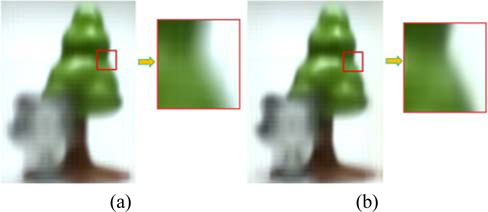
In the experimental results, we utilized the original captured CEIA and synthesized REIA to reconstruct the 3D images. The 3D objects
In conclusion, we have presented a resolution-enhanced computational 3D reconstruction method by using boundary folding mirrors in an integral imaging system. In the proposed method, a CEIA that contains extra reflected perspective information is picked up firstly by using a lenslet array combined with boundary folding mirrors. The generated REIA is synthesized from the captured CEIA, in which the REIA is used to reconstruct resolution-enhanced 3D images. The experimental results confirmed the feasibility of the proposed system.