Recently, the issue of the limited supply of radio spectrum resources has become a growing concern due to the enormous demand for wireless communication services. At the same time, the current system of fixed allocation of the spectrum leads to low usage for most of the spectrum, according to the research of the US Federal Communi-cations Commission (FCC) [1]. In the face of this so-called “spectral crisis”, Mitola [2] proposed the concept of ‘cognitive radio (CR)’.
Wireless communication technology has entered the era of 4G/5G. The demands for higher data transmission speed through wireless communication systems increase with each passing day. How to improve the reliability and bandwidth efficiency of the system has become the vital target of wireless communication technology design in the next generation and beyond. Transmitting data streams using multiple antennas, known as multiple-input/multiple-output (MIMO), can increase the capacity and bandwidth efficiency of communication systems significantly without greatly increasing the system bandwidth at the same time. This is considered one of the key technologies of modern wireless communication [1]. However, MIMO has some drawbacks [2]: high inter-antenna synchronization is required among transmitting antennas to meet the demand of simultaneous data transmissions; simultaneous data transmissions by multiple antennas can cause high inter-channel interference (ICI), which increases the difficulty of decoding, as well as the complexity of the system; and multiple RF chains are needed when multiple antennas work at the same time, increasing system costs.
A CR system is an intelligent radio communication system that is able to sense the surrounding radio envi-ronment and analyze the sensed result. Then the radio operating parameters will be dynamically adjusted in real time on the basis of that result [3]. The drawbacks of the present spectrum allocation scheme can be resolved effect-tively by the secondary utilization of spectrum resources. According to the IEEE 802.22.1 standard [4], the secondary user (SU) should detect TV and broadcast signal and idle channels within 2 seconds, which requires cognitive users to access and exit the frequency band authorized by the primary user (PU) promptly, on the premise of guaranteed high detection probability.
The existing spectrum sensing algorithms can be roughly classified into three categories:
On account of the problems with the existing algorithms, the concept of using the generalized likelihood ratio has been raised [9]. In a multi-antenna system, when there is only one PU in the space, the structural properties of the received signal can be utilized to design an algorithm. In such a case, the application environment is more realistic because only a small number of sample points are involved. This algorithm has a higher detection performance under a low signal-to-noise ratio (SNR). However, this algorithm is only appropriate for a situation with one PU, while real situations usually involve several PUs at the same time. The detection performance of this algorithm can drop off severely when several PUs exist.
So far, most eigenvalue-based spectrum sensing algo-rithms have been designed based on the analysis of detection performance using random matrix theory (RMT) [10], and significant branches of RMT can be classified into asymptotic theory and non-asymptotic theory. Asymptotic theory studies the convergence property of the spectrum distribution function of the random matrix in infinite dimensional space. These concepts have now been quite thoroughly explored, and asymptotic theory has already been widely applied to all kinds of proposed eigenvalue algorithms. Meanwhile, non-asymptotic theory [11] is the latest achievement within RMT: the convergence property of the spectrum distribution function of the random matrix in finite-dimensional space. In an actual situation, the number of sampling points is usually small; thus non-asymptotic theory is more widely applicable.
Meanwhile, existing eigenvalue algorithms only use the characteristics of some particular eigenvalues, for example, the maximum eigenvalue, the minimum eigenvalue, and the ratio of the maximum and minimum eigenvalue. Other eigenvalues have not been used. Therefore, the purpose of this paper is to excavate potential uses of these neglected eigenvalues and design eigenvalue detection algorithms with joint distribution of eigenvalues, in order to improve the performance of spectrum sensing.
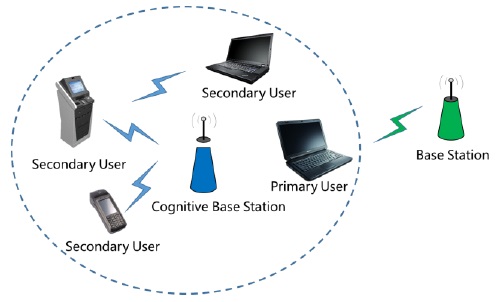
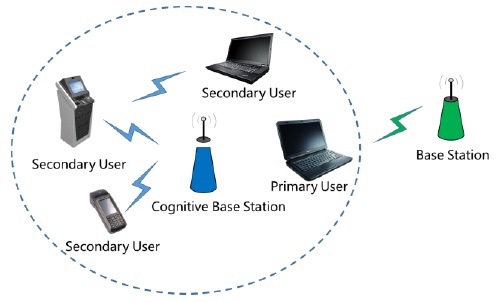
A typical multi-antenna spectrum sensing scenario is as shown in Fig. 1. In the space, the number of PUs is
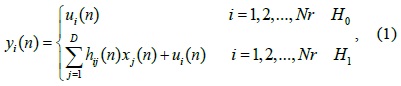
where
The statistical matrix of the received signal at the SU can be expressed as follows:
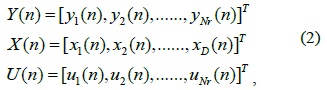
where

The covariance matrix of the received signal is thus

From (3) and (4),

In an actual algorithm, to approximate an observed signal with finite sampling points

With (4) recalculated,
Suppose that the eigenvalues of the sampling covariance matrix are
Based on the analysis of the system model, we can use eigenvalues of the received signal to detect whether there is a PU. For the detection threshold
III. SPECTRUM-SENSING ALGORITHM
Many spectrum-sensing algorithms have been developed based on eigenvalues. Relatively speaking, the maximum-minimum eigenvalue (MME) algorithm based on RMT is a classic one. In light of the drawbacks of its performance, taking the pre-difference, Lagrange’s interpolation, and the double threshold method, for example, is put forward. What is undeniable is that most of the algorithms have only used the properties of some eigenvalues. The algorithms proposed in this paper were developed with the goal of finding effective detection algorithms that use the joint distribution properties of the received signal’s eigenvalues. The existing algorithms and proposed algorithms can be classified as follows.
>
A. Based On the Limit Distribution Character of the Maximum Eigenvalue
1) Maximum-Minimum Eigenvalue
When H0 is true, the ratio of the maximum and minimum eigenvalues is 1, and when H1 is true, the ratio of the maximum and minimum eigenvalues is According to the difference of the ratios under the two hypotheses, the MME algorithm uses

If
2) Maximum Eigenvalue Detection
Under a binary hypothesis, H0 indicates a lack of PUs, and thus while H1 indicates the presence of a PU and Therefore, the ratio of the maximum eigenvalue and noise variance under the two hypotheses can be used as the detection statistic, written as follows:

If
3) Generalized Likelihood Ratio Test
Under a binary hypothesis regarding the CR system, the general model of the generalized likelihood ratio can be written as follows:
In accordance with the maximum likelihood estimation, the detection statistic can be determined by
If
>
B. Joint Distribution Based on Eigenvalues
4) Arithmetic-to-Geometric Mean
This algorithm uses the ratio of the arithmetic mean value and geometric mean value of the eigenvalues of the received signal covariance matrix as the detection statistic, which is indicated as follows:
If
5) Eigenvalue Energy Summation
The eigenvalues of the received signal covariance matrix can represent the energy of the signal. We perform energy summation of the eigenvalues and extract a root to find its amplitude, written as:
If
6) Double Maximum Eigenvalue Detection
Under a binary hypothesis, H0 indicates that no PUs exist, and thus while H1 indicates the opposite and thus This algorithm is similar to the MED algorithm, but instead of the maximum eigenvalue, the sum of the two largest eigenvalues is used. The detection statistic can then be written as follows:

If
7) Eigenvalue Weight
The eigenvalues of the received signal covariance matrix reflect its projected length in the direction of the eigenvectors to some extent, which is also the energy of the signal in this direction. Thus we consider making full use of this property of the eigenvalues, taking a proportion of the energy of each signal in the received signal as a weighted value, and the weighted energy as the detection threshold:
If
8) Multiple Eigenvalue Weight
For the eigenvalues of the received signal, we can conclude that
where the left part of the inequality is the detection statistic of the EW algorithm. If the right part of the inequality is shifted to the left, and the new detection statistic is expressed as
If
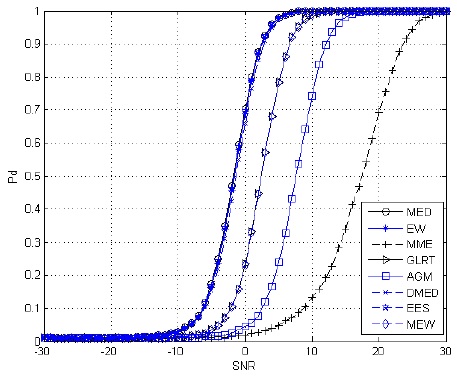
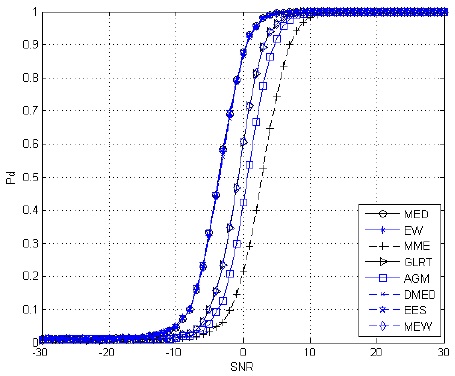
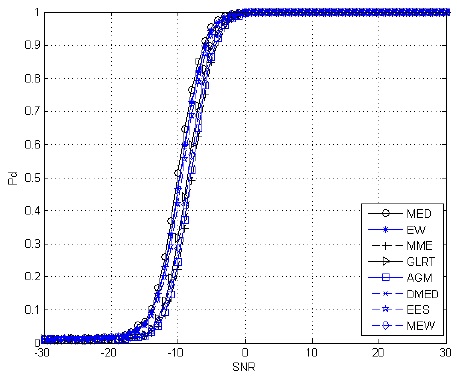
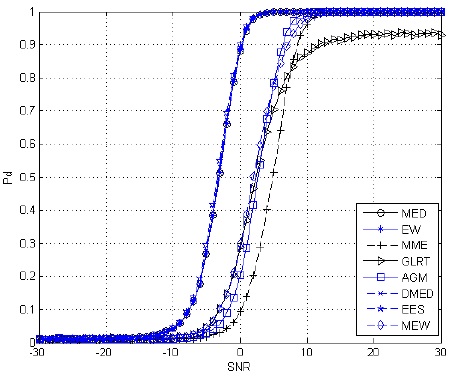
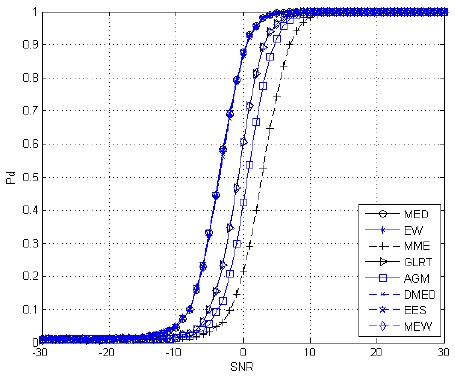
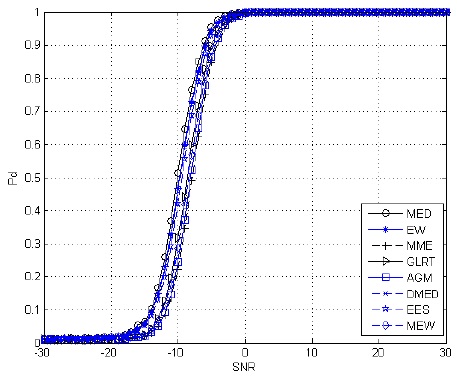
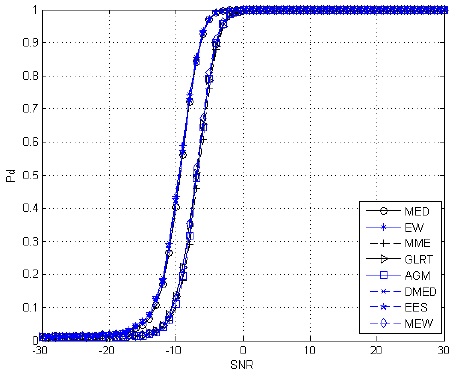
In this paper, we suppose that the SU’s receiver has 4 antennas,
From the simulation results shown in Figs. 2–4, we can conclude the following.
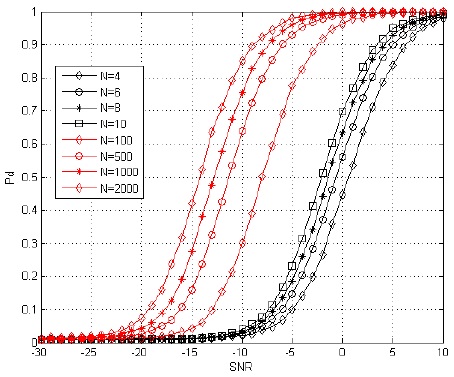
When there is only one PU in the environment, as the number of sampling points
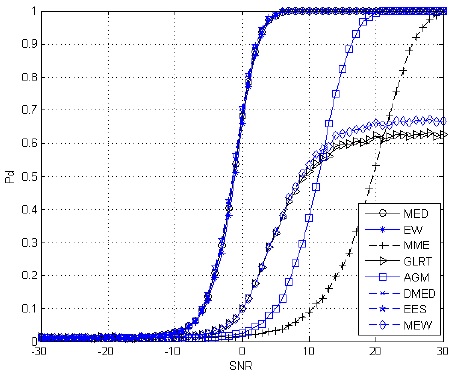
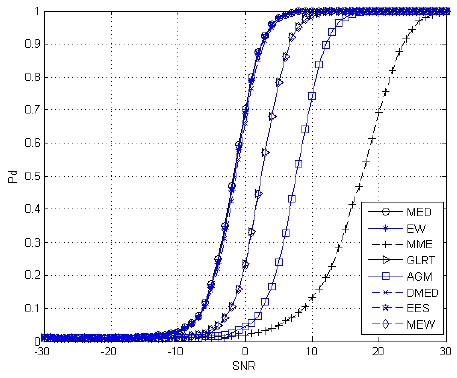
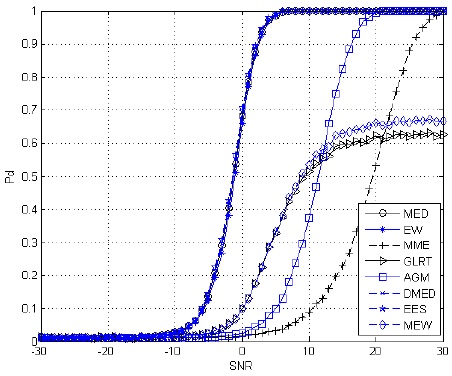
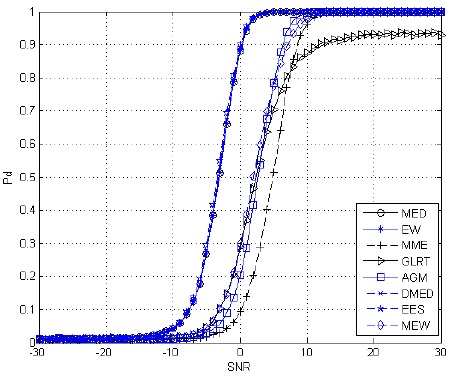
From the simulation results shown in Figs. 5–7, we can conclude the following.
When there are two PUs in the space, as the number of sampling points
Regardless of whether one or two PUs are in the environment, the EW algorithm has favorable detection performance under a low SNR. For instance, when the detection probability comes to 0.6 and
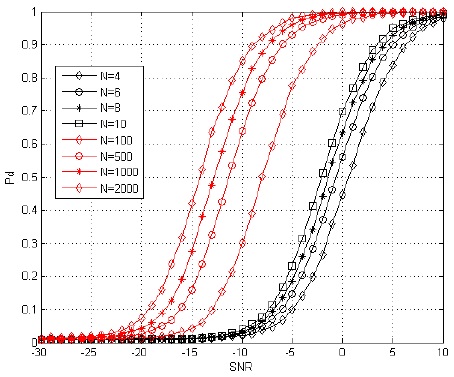
From the simulation result shown in Fig. 8, we can conclude the following.
For the EW algorithm, as the number of sampling points
This paper has proposed various new spectrum-sensing algorithms based on the joint distribution of the eigenvalues in a multiple-user cognitive radio environment, which make full use of the impact of the eigenvalue component during detection, acquire favorable detection performance under a low SNR, and ensure the robustness of detection with a small number of sampling points. In a study to follow, we plan to analyze the proposed algorithms theoretically on the basis of RMT.